Optimal Deployment of Sensor Nodes Based on Performance Surface of Underwater Acoustic Communication



Abstract
:1. Introduction
2. Algorithm for Optimal Deployment
2.1. Modeling of the Underwater Acoustic Channel Impulse Response
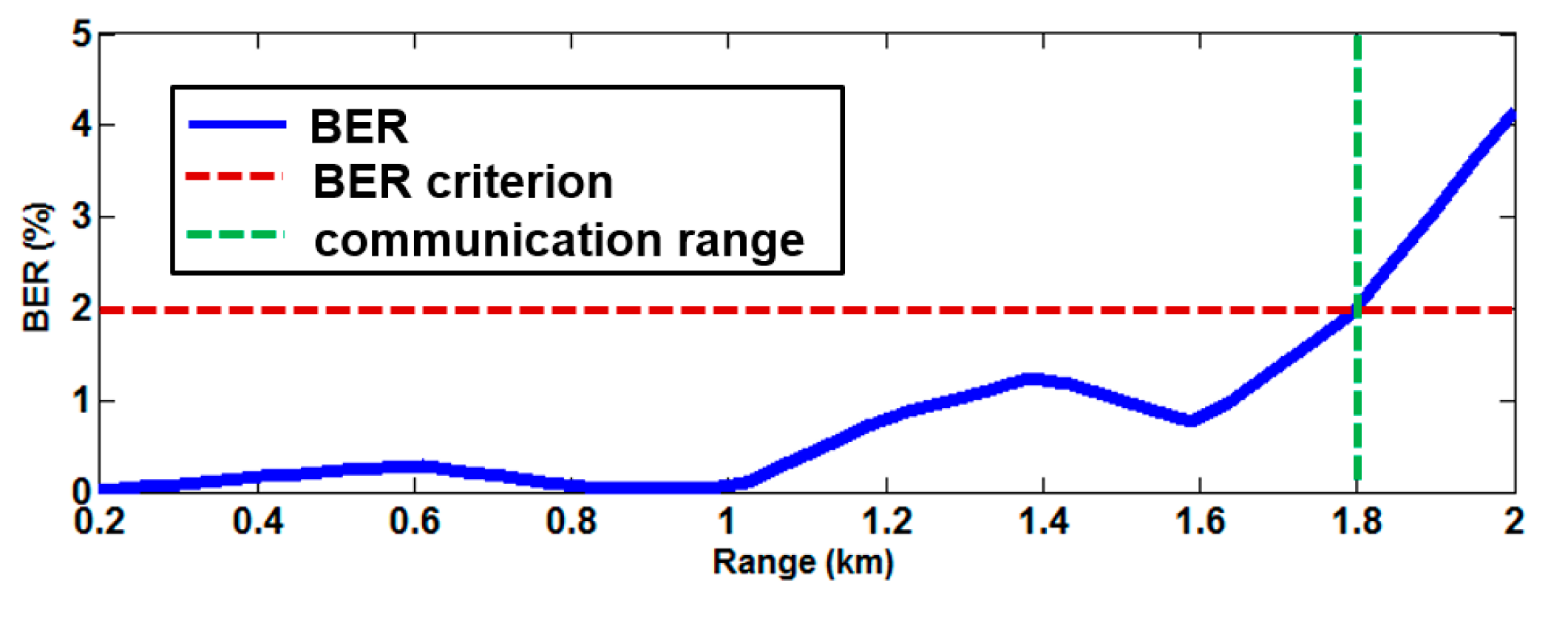
2.2. Estimate of the Communication Performance
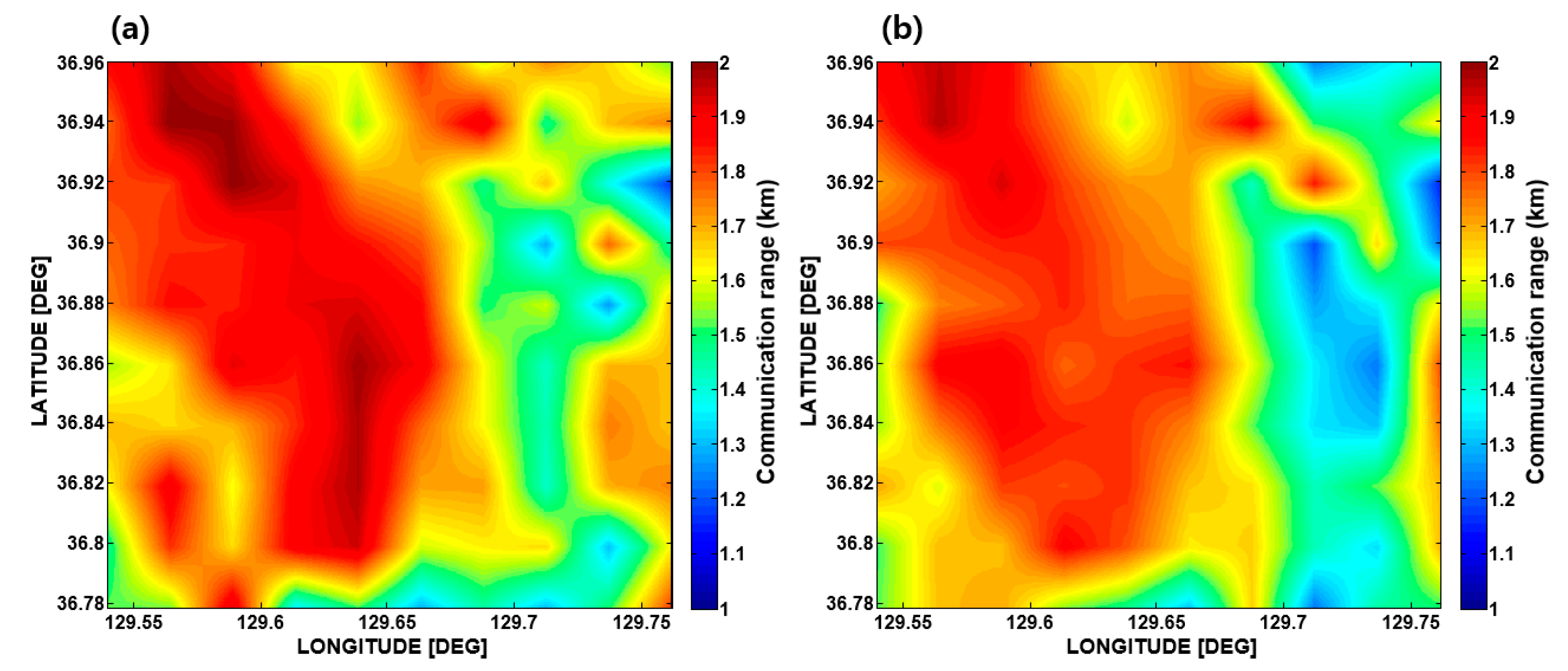
2.3. Communication Performance Surface Algorithm
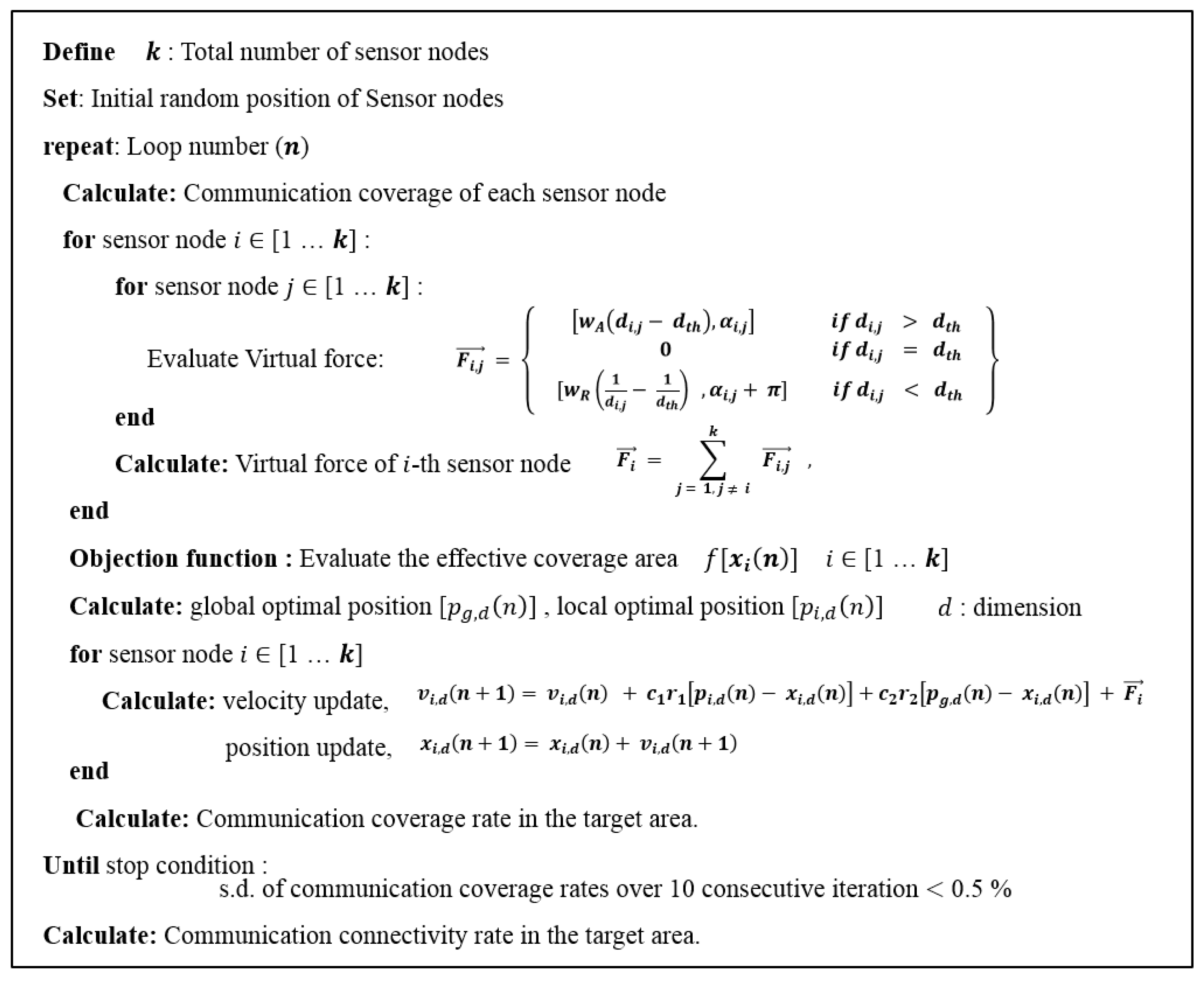
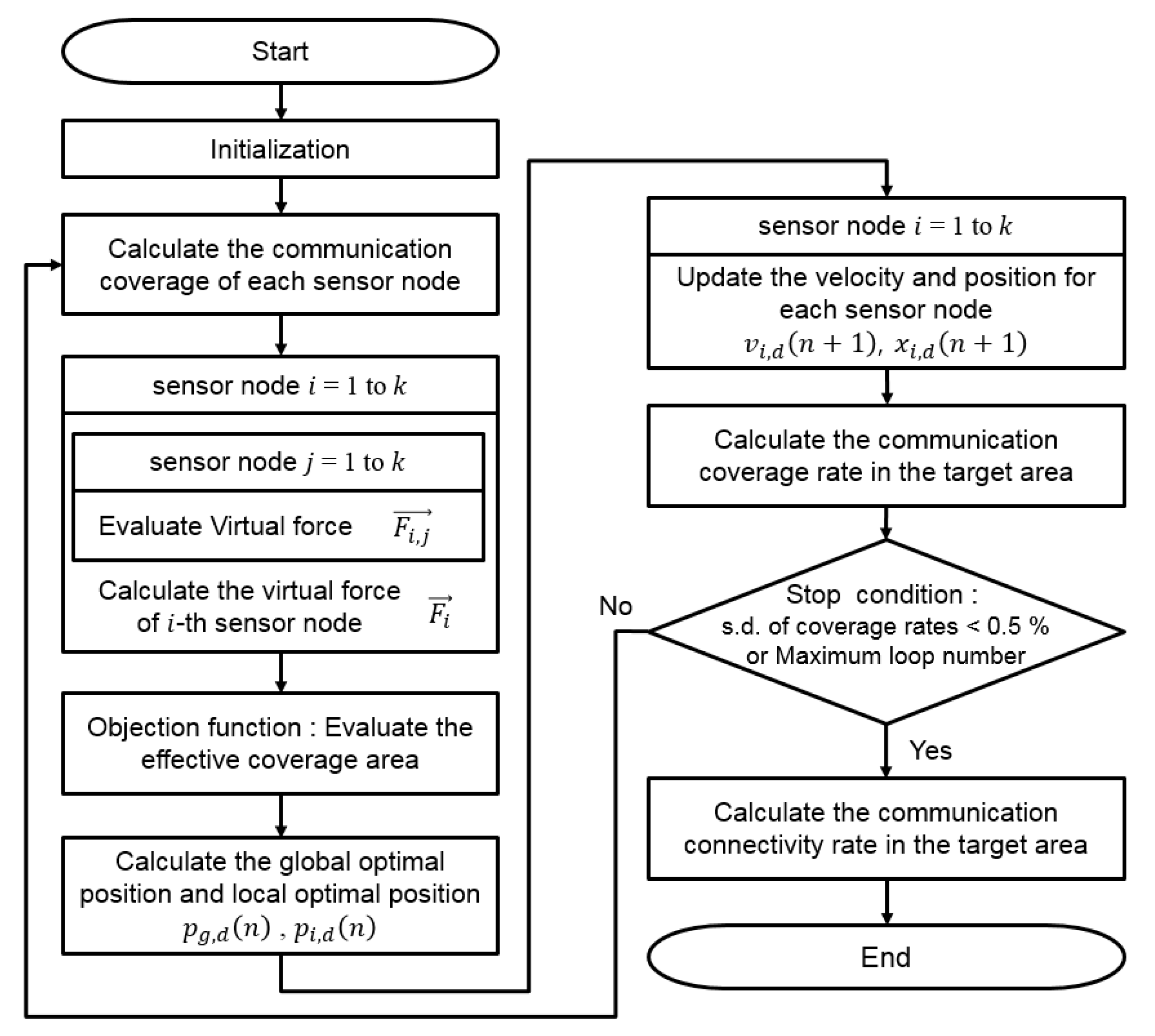
2.4. Optimal Deployment Algorithm for the Sensor Nodes
3. Simulation Results
4. Summary and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Lloret, J. Underwater sensor nodes and networks. Sensors 2013, 13, 11782–11796. [Google Scholar] [CrossRef] [PubMed]
- Akkaya, K.; Newell, A. Self-deployment of sensors for maximized coverage in underwater acoustic sensor networks. Comput. Commun. 2009, 32, 1233–1244. [Google Scholar]
- Garcia-Pineda, M.; Sendra, S.; Atenas, M.; Lloret, J. Underwater wireless ad-hoc networks: A survey. In Mobile Ad Hoc Networks: Current Status and Future Trends; CRC Press: Boca Raton, FL, USA, 2011; pp. 379–411. [Google Scholar]
- Senel, F.; Akkaya, K.; Yilmaz, T. Autonomous deployment of sensors for maximized coverage and guaranteed connectivity in underwater acoustic sensor networks. In Proceedings of the 38th IEEE Conference on Local Computer Networks (LCN), Sydney, Australia, 21–24 October 2013; pp. 211–218. [Google Scholar]
- Jiang, P.; Liu, J.; Ruan, B.; Jiang, L.; Wu, F. A new node deployment and location dispatch algorithm for underwater sensor networks. Sensors 2016, 16, 82. [Google Scholar] [CrossRef] [PubMed]
- Du, H.; Xia, N.; Zheng, R. Particle swarm inspired underwater sensor self-deployment. Sensors 2014, 14, 15262–15281. [Google Scholar] [CrossRef] [PubMed]
- Luo, H.; Guo, Z.; Dong, W.; Hong, F.; Zhao, Y. LDB: Localization with directional beacons for sparse 3D underwater acoustic sensor networks. J. Netw. 2010, 5, 28–38. [Google Scholar] [CrossRef]
- Pompili, D.; Melodia, T.; Akyildiz, I.F. Three-dimensional and two-dimensional deployment analysis for underwater acoustic sensor networks. Ad Hoc Netw. 2009, 7, 778–790. [Google Scholar] [CrossRef]
- Son, S.U.; Kim, H.; Joo, J.; Choi, J.W. Multipath Effects on High-Frequency Coherent Acoustic Communications in Shallow Water. Jpn. J. Appl. Phys. 2013, 52, 07HG03. [Google Scholar] [CrossRef]
- Emokpae, L.; Younis, M. Surface Based Underwater Communications. In Proceedings of the IEEE Global Telecommunications Conference (GLOBECOM 2010), Miami, FL, USA, 6–10 December 2010. [Google Scholar]
- Walree, P.A. Propagation and scattering effects in underwater acoustic communication channels. IEEE J. Ocean. Eng. 2013, 38, 614–631. [Google Scholar] [CrossRef]
- Rouseff, D.; Badiey, M.; Song, A. Effect of reflected and refracted signals on coherent underwater acoustic communication: Results from the Kauai experiment (KauaiEx 2003). J. Acoust. Soc. Am. 2009, 126, 1359–2366. [Google Scholar] [CrossRef] [PubMed]
- Yang, T.C. Properties of underwater acoustic communication channels in shallow water. J. Acoust. Soc. Am. 2012, 131, 129–145. [Google Scholar] [CrossRef] [PubMed]
- Hung, H.S.; Chang, S.H.; Chen, S.L.; Chang, C.W. Real time implementation of frost beamforming for underwater communications. J. Mar. Sci. Eng. 1999, 7, 1–7. [Google Scholar]
- Song, H.C.; Hodgkiss, W.S.; Kuperman, W.A. High-rate synthetic aperture communications in shallow water. J. Acoust. Soc. Am. 2009, 126, 3057–3061. [Google Scholar] [CrossRef] [PubMed]
- Kilfoyle, D.B.; Baggeroer, A.B. The State of the Art in Underwater Acoustic Telemetry. IEEE J. Ocean. Eng. 2000, 25, 4–27. [Google Scholar] [CrossRef]
- McDowell, P. Environmental and Statistical Performance Mapping Model for Underwater Acoustic Detection Systems. Ph.D. Thesis, University of New Orleans, New Orleans, LA, USA, 2010. [Google Scholar]
- Chen, J.; Li, S.; Sun, Y. Novel Deployment Schemes for Mobile Sensor Networks. Sensors 2007, 7, 2907–2919. [Google Scholar] [CrossRef] [PubMed]
- Zou, Y.; Chakrabarty, K. Sensor deployment and target localization based on virtual forces. In Proceedings of the Twenty-Second Annual Joint Conference of the IEEE Computer and Communications (INFOCOM 2003), San Francisco, CA, USA, 30 March–3 April 2003. [Google Scholar]
- Majid, A.S.; Joelianto, E. Optimal Sensor Deployment in Non-Convex Region using Discrete Particle Swarm Optimization Algorithm. In Proceedings of the IEEE Conference on Control, Systems & Industrial Informatics, Bandung, Indonesia, 23–26 September 2012; pp. 23–26. [Google Scholar]
- Wang, X.; Ma, J.; Wang, S.; Bi, D.W. Distributed particle swarm optimization and simulated annealing for energy-efficient coverage in wireless sensor networks. Sensors 2007, 7, 628–648. [Google Scholar] [CrossRef]
- Wang, X.; Wang, S.; Ma, J.J. An improved co-evolutionary particle swarm optimization for wireless sensor networks with dynamic deployment. Sensors 2007, 7, 354–370. [Google Scholar] [CrossRef]
- Amante, C.; Earkins, B.W. ETOPO1 1 Arc-Minute Global Relief Model: Procedures, Data Sources and Analysis; NOAA Technical Memorandum; National Geophysical Data Center: Boulder, CO, USA, 2009. [Google Scholar]
- Ryan, W.B.F.; Carbotte, S.M.; Coplan, J.O. Global Multi-Resolution Topography Synthesis. Geochem. Geophys. Geosyst. 2009, 10, 1–9. [Google Scholar] [CrossRef]
- Carnes, M.R. Description and Evaluation of GDEM-V 3.0; Memorandum Report; Naval Research Laboratory: Hancock County, MS, USA, 2009. [Google Scholar]
- Jackson, D.R.; Richardson, M.D. High-Frequency Seafloor Acoustics; Springer: New York, NY, USA, 2006; pp. 313–314. [Google Scholar]
- Porter, M.B.; Bucker, H.P. Gaussian beam tracing for computing ocean acoustic fields. J. Acoust. Soc. Am. 1987, 82, 1349–1359. [Google Scholar] [CrossRef]
- Proakis, J.G.; Salehi, M. Digital Communications; McGraw-Hill: New York, NY, USA, 2008; pp. 710–721. [Google Scholar]
- Stojanovic, M.; Catipovic, J.A.; Proakis, J.G. Phase-Coherent Digital Communications for Underwater Acoustic Channels. IEEE J. Ocean. Eng. 1993, 19, 100–111. [Google Scholar] [CrossRef]
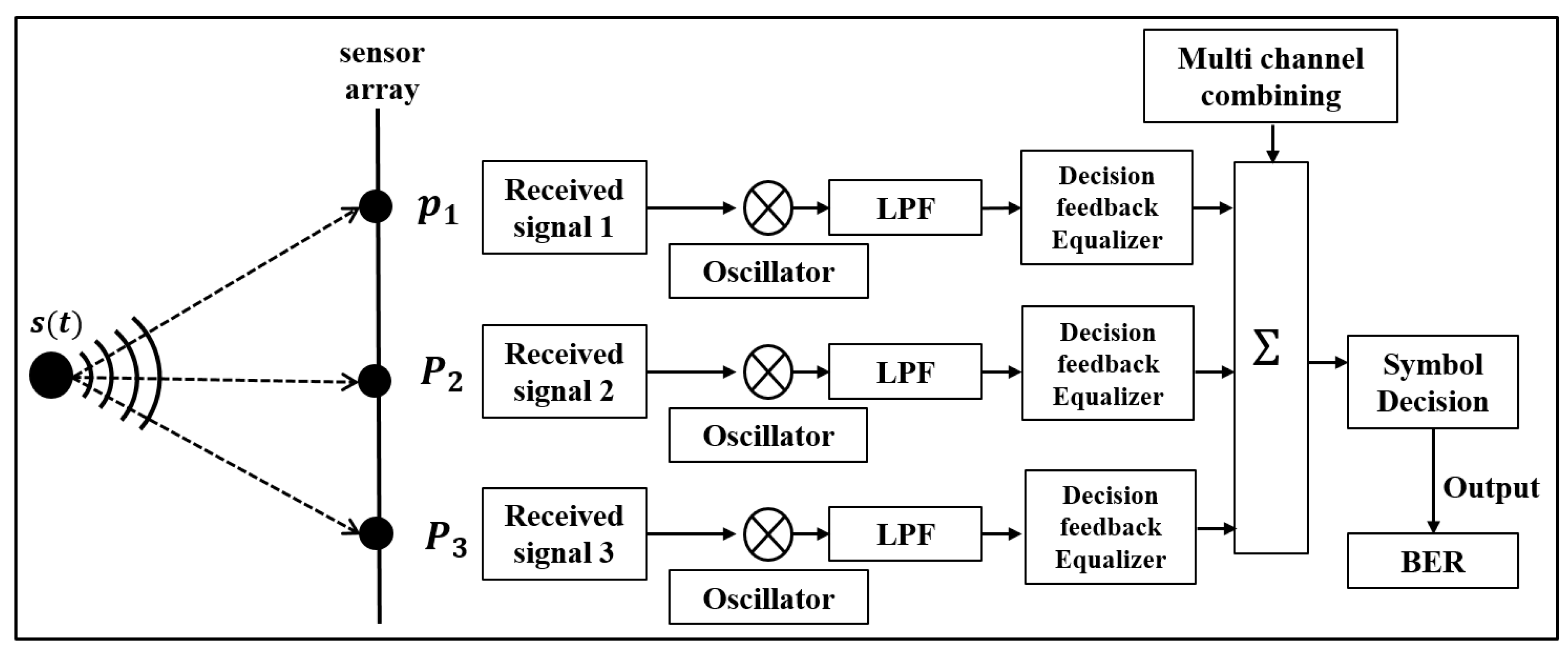
- Abdi, A.; Guo, H. A New Compact Multichannel Receiver for Underwater Wireless Communication Networks. IEEE Trans. Commun. 2009, 8, 3326–3329. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environmental Parameters | Value | Channel Modeling Parameters | Value |
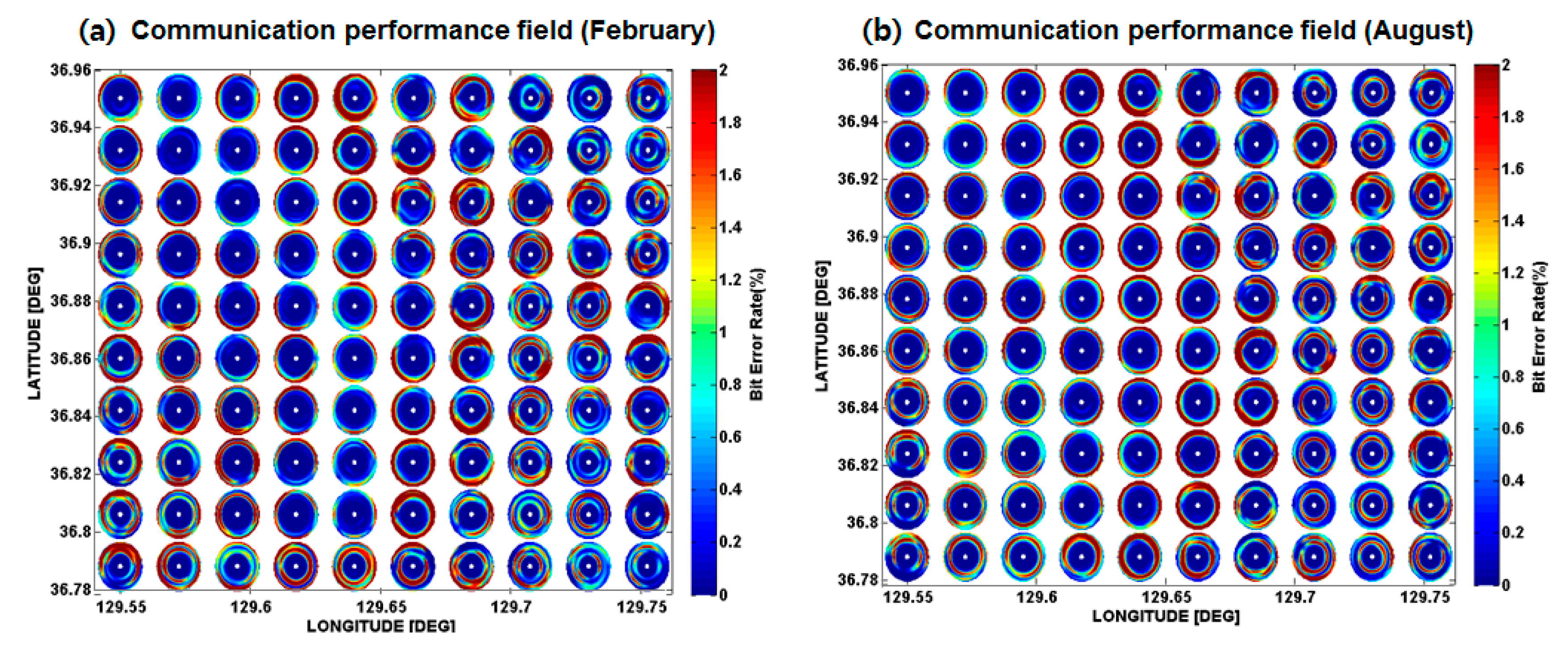
| Month | 2, 8 | Frequency | 10 kHz |
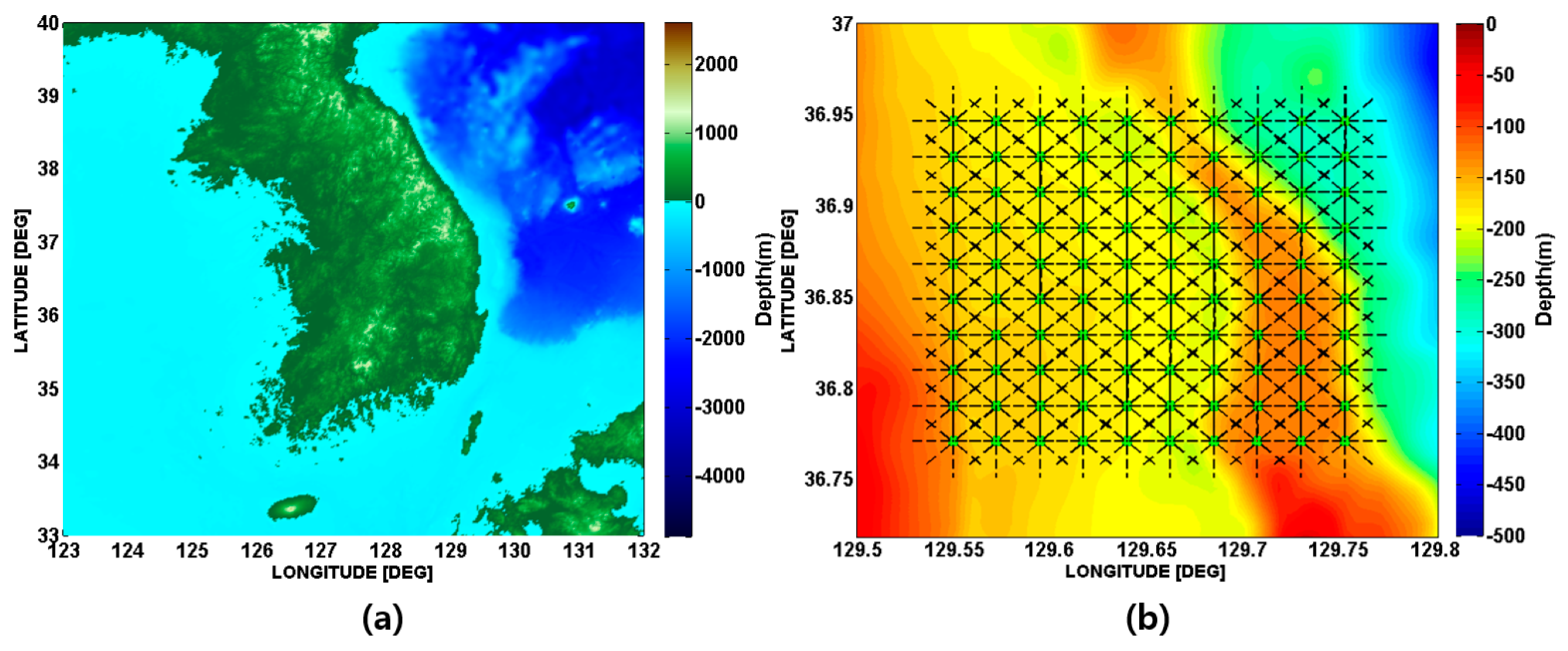
| Longitude direction distance | 22 km | Source level | 140 dB |
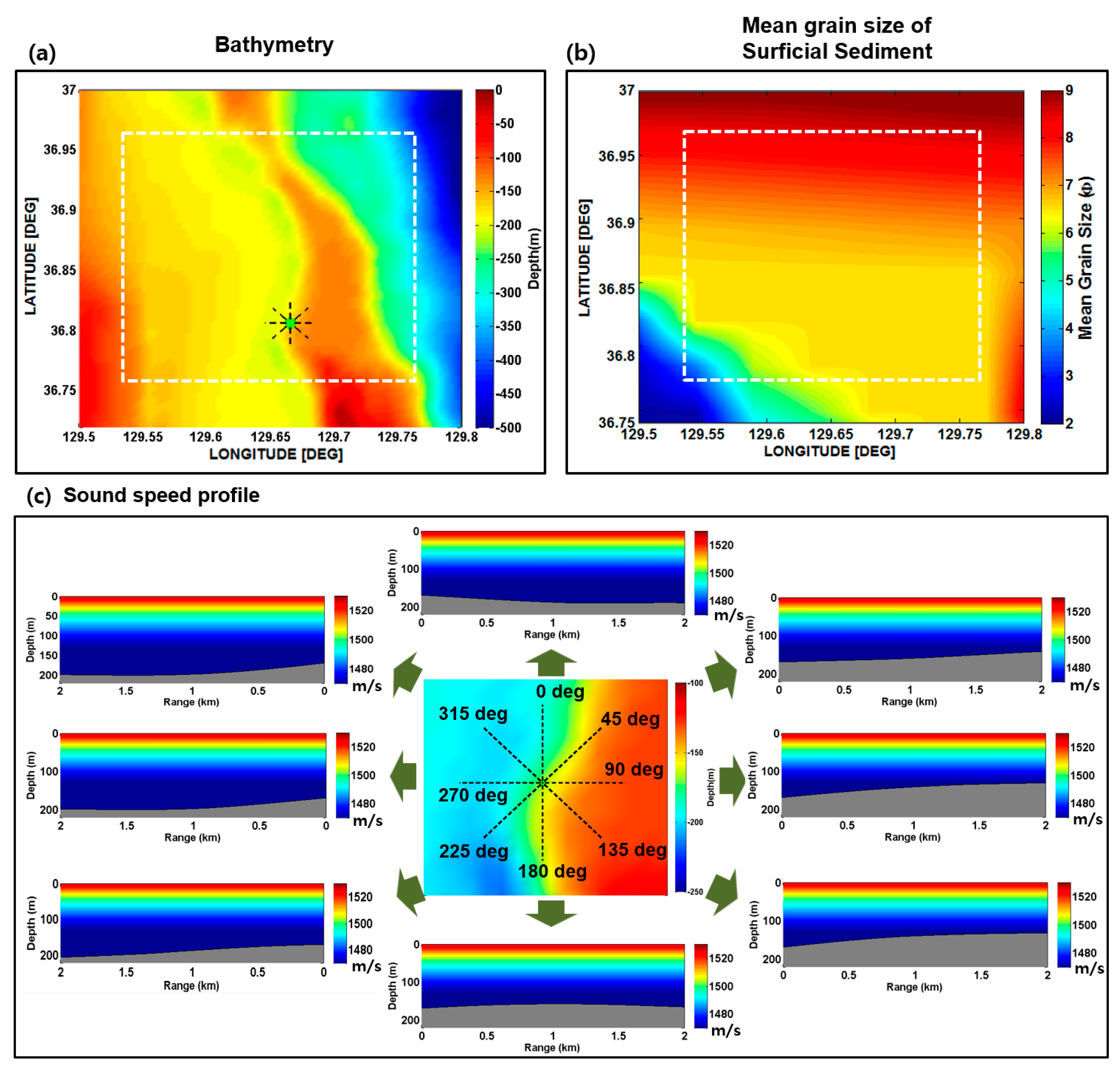
| Latitude direction distance | 22 km | Source depth | 2 m above the bottom |
| Wind speed | 10 m/s | Receiver depth (Three vertical receiver array) | 0.5~3.5 m above the bottom |
| Azimuth angle interval | 45° | ||
| Grid points | 100 | Element spacing | 1.5 m (10 λ) |
| Communication Parameters | Value | Optimal Deployment Parameters | Value |
| Symbol number | 3500 | Loop number | 50 |
| Symbol rate | 1000 sps | Sensor node number | 100 |
| Pulse shaping | Root Raised Cosine filter | Weight value of attractive force | 0.01 |
| Equalizer | Adaptive DFE(RLS) | Weight value of repulsive force | 0.5 |
| BER criterion | 2% | Acceleration weight | 1 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Choi, J.W. Optimal Deployment of Sensor Nodes Based on Performance Surface of Underwater Acoustic Communication. Sensors 2017, 17, 2389. https://doi.org/10.3390/s17102389
Kim S, Choi JW. Optimal Deployment of Sensor Nodes Based on Performance Surface of Underwater Acoustic Communication. Sensors. 2017; 17(10):2389. https://doi.org/10.3390/s17102389
Chicago/Turabian StyleKim, Sunhyo, and Jee Woong Choi. 2017. "Optimal Deployment of Sensor Nodes Based on Performance Surface of Underwater Acoustic Communication" Sensors 17, no. 10: 2389. https://doi.org/10.3390/s17102389
APA StyleKim, S., & Choi, J. W. (2017). Optimal Deployment of Sensor Nodes Based on Performance Surface of Underwater Acoustic Communication. Sensors, 17(10), 2389. https://doi.org/10.3390/s17102389