In this section, we explain in detail the proposed face routing: transfer-efficient face routing (TEFR), which improves transfer efficiency by using the planar graph of the neighbor. Research on TEFR started with the notion that if a routing path can be known in advance within radio range, a message can be forwarded without travelling via intermediate nodes. Thus, if the routing path ABCDF can be determined in advance, it will be possible to efficiently send the message through a reduced number of hops by direct transmission from A to F. TEFR uses a local full planar graph that has been built with the planar graphs of neighbors to know the routing path within radio range in advance.
TEFR goes through three phases. In the first phase, location information is exchanged between nodes. In the second phase, the local planar graph is built using the received node information, and the generated graph information is transmitted to the message transfer node. Finally, the message transfer node generates the full planar graph within radio range with the collected planar graph information, finds the remote node using this, and then transmits the message.
TEFR is used in conjunction with greedy routing for message forwarding in void areas where greedy routing cannot deliver a message. We assumed that nodes are deployed randomly in a two-dimensional plane, that the link between nodes is reliable, and that their power status, their own position and the location of the source and destination of the message are known. We used a GG composed of a unit disk graph as a planar graph. We describe the exchange of location information between nodes and the construction of local planar graphs, and then we define the process of discovering the node to send a message to using the generated planar graphs of its neighbors. Finally, we analyze the performance of the proposed face routing.
4.2. Build a Local Planar Graph
The second step of TEFR is to construct a local planar graph using the location information on the neighboring nodes and to transfer the information on the constructed planar graph to the message transfer node. The message transfer node and its neighbors generate their own local network graphs and their local GGs are built after planarization.
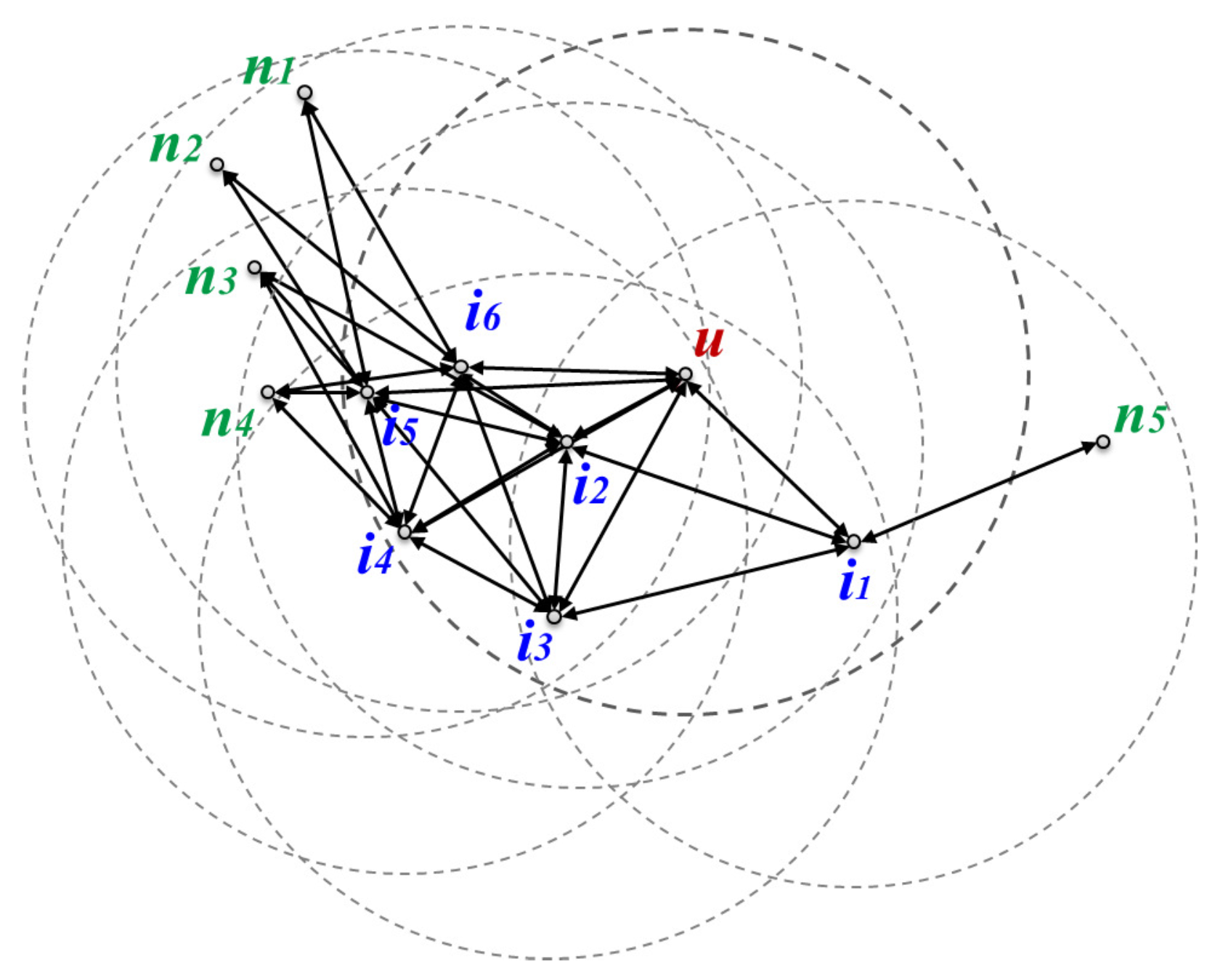
Table 1 shows the edge list of the constructed local network graph of the message transfer node and its neighbors after exchanging location information between nodes in the network in
Figure 3. Although the local network graph is part of the overall network graph, it is still possible to cause a loop across the entire network. Thus, even though the local network is tiny, it is necessary to remove any intersecting edges that might cause a loop by applying planarization.
A local GG edge list is built for the message transfer node and its neighbors by removing edges that do not satisfy the GG edge condition from the edge list of the local network graphs to prevent looping.
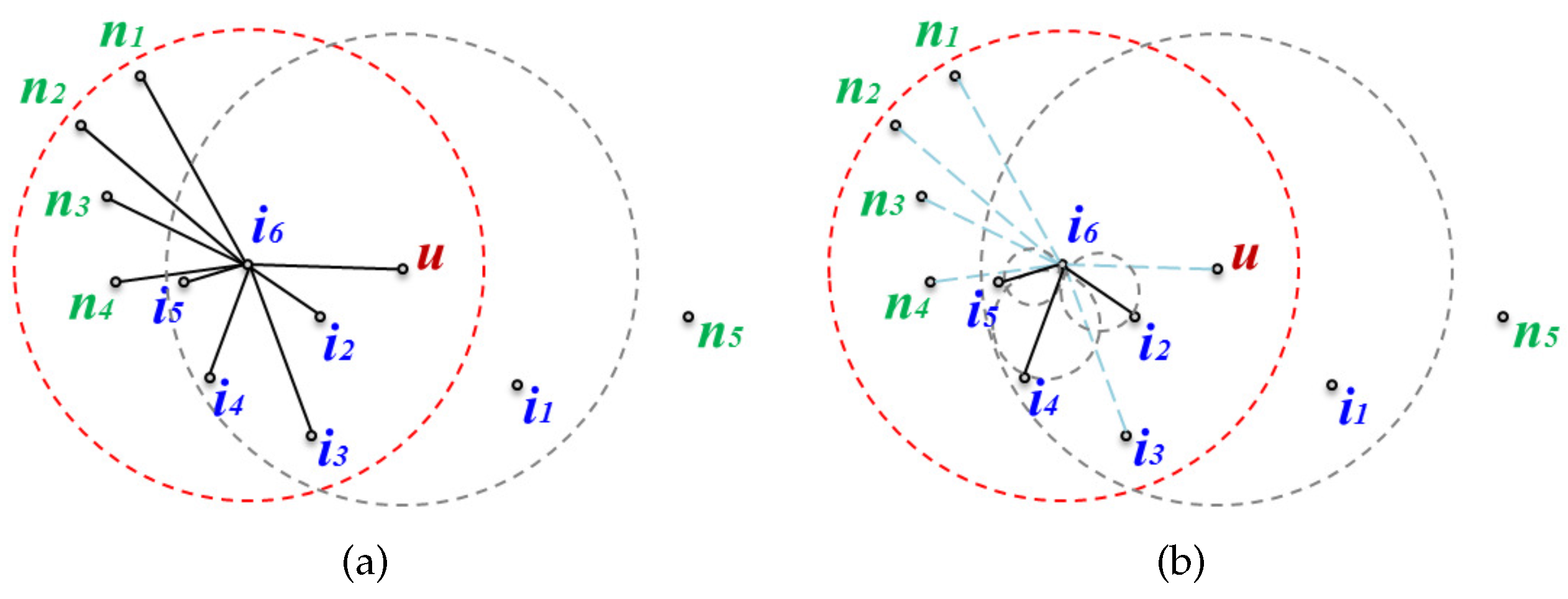
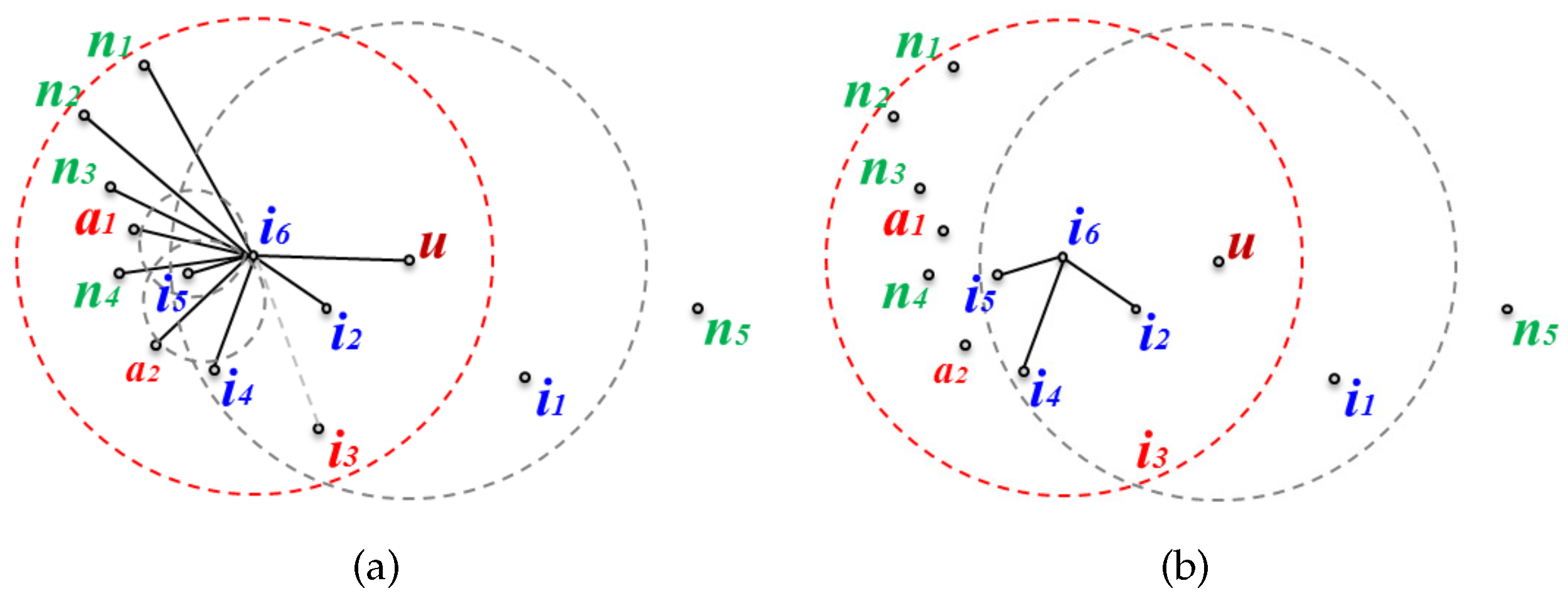
Figure 4 shows a local network graph and a local planar graph of node
as an example of a planar graph built for the neighbors of a message transfer node. In
Figure 4a, to perform planarization for node
, the GG edge condition is applied to all the edges connected to its neighbors. The resulting planar graph is shown in
Figure 4b.
Planarization is performed independently on the message transfer node and all its neighbors. The pseudo-code running on each node for generating the GG edge list from the edge list of a local network graph is as follows.
| Algorithm 1 Generating the GG edge list from the edge list of a local network graph. |
| : edge list of the local network graph |
| : edge list of the local Gabriel graph |
|
| for all edges in do |
| if (there exists no node in the circle with edge’s diameter) then |
| add edge to |
| end if |
| end for |
The algorithm generates the GG edge list by selecting those edges meeting the GG edge condition among all edges on the local network graph.
Table 2 shows the GG edge lists constructed by applying Algorithm 1 to the local network graph edge lists in
Table 1. The strikethroughs in
Table 2 represent edges that were deleted during planarization, so are not GG edges.
Since TEFR distributes planarization to the message transfer nodes’ neighbors, it is possible to solve the problem that the load is concentrated on the message transfer nodes, which makes face routing using 2-hop node information so inefficient. Moreover, because the message transfer node only receives information of the planar graph nodes rather than of all neighboring nodes, the amount of position information to be transmitted can be reduced. In addition, the changes are transmitted to the message transfer node each time a node is added or removed only if the planar graph is affected due to a change in topology. Therefore, TEFR improves efficiency and minimizes the amount of location information that needs to be transferred.
Figure 5 and
Figure 6 show two cases where the changed node information is either sent or not sent to the message transfer node when a node is added or removed.
Figure 5 shows the case where the topology is changed but the changes do not affect the planar graph, while
Figure 6 shows the opposite case to
Figure 5 where the changed node information should be sent to the message transfer node.
Figure 5a is the local network where new nodes
and
are added, and node
is deleted in the network of
Figure 4a. Even if nodes
and
are added but the edges between node
and them are deleted during planarization, this does not affect the existing planar graph. Furthermore, even though node
is removed from the network since
has already been deleted from the existing planar graph due to not fitting the GG edge condition, this also does not affect the existing planar graph.
Figure 5b shows the planar graph after topological changes have occurred. Since it is the same as before the network change, the changed node information is not transmitted even though there have been topological changes.
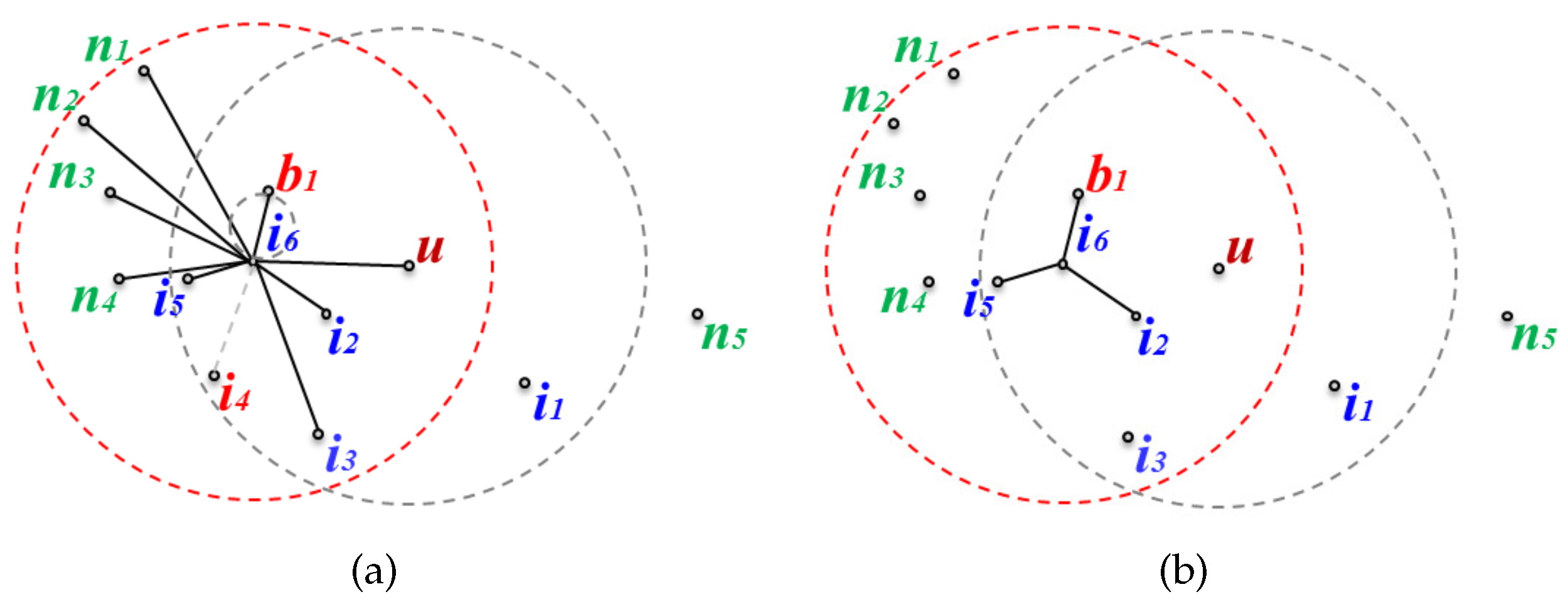
Figure 6 shows the case where a topological change affects the planar graph.
Figure 6a depicts the local network where new node
is added to the network of
Figure 4a, and
is deleted.
becomes a new edge on the planar graph according to the GG edge condition, and
, which was an edge on the existing planar graph, is removed because the node has been deleted (
Figure 6b shows the planar graph after adding and removing the nodes). Since the existing planar graph has been changed, the changed planar graph information on node
must be sent to the message transfer node.
4.3. Remote Node Selection and Message Forwarding
The last step in the TEFR method is to discover the node located at the most distant hop on a routing path within radio range using the information on the planar graphs of the neighbors at the message transfer node, and then send the message. The message transfer node generates an edge list of the full planar graph within radio range using the local planar graph information received from the neighbor to determine which node the message is to be transferred to.
Table 3 shows the full GG edge list within radio range built with the planar graph information of its neighbors at message transfer node
u in
Figure 3. Each item in the edge list consists of the start node
, the end node
, and their
coordinates:
, the immediate neighbor of the message transfer node, is the node
whose local planar graph is sent to the message transfer node and is the starting node of the edge;
represents the opposite side node of the edge; and
and
represent the location information for the
and
nodes. When the start and end nodes of all edges in the list are connected, a full planar graph within radio range of a message transfer node is generated.
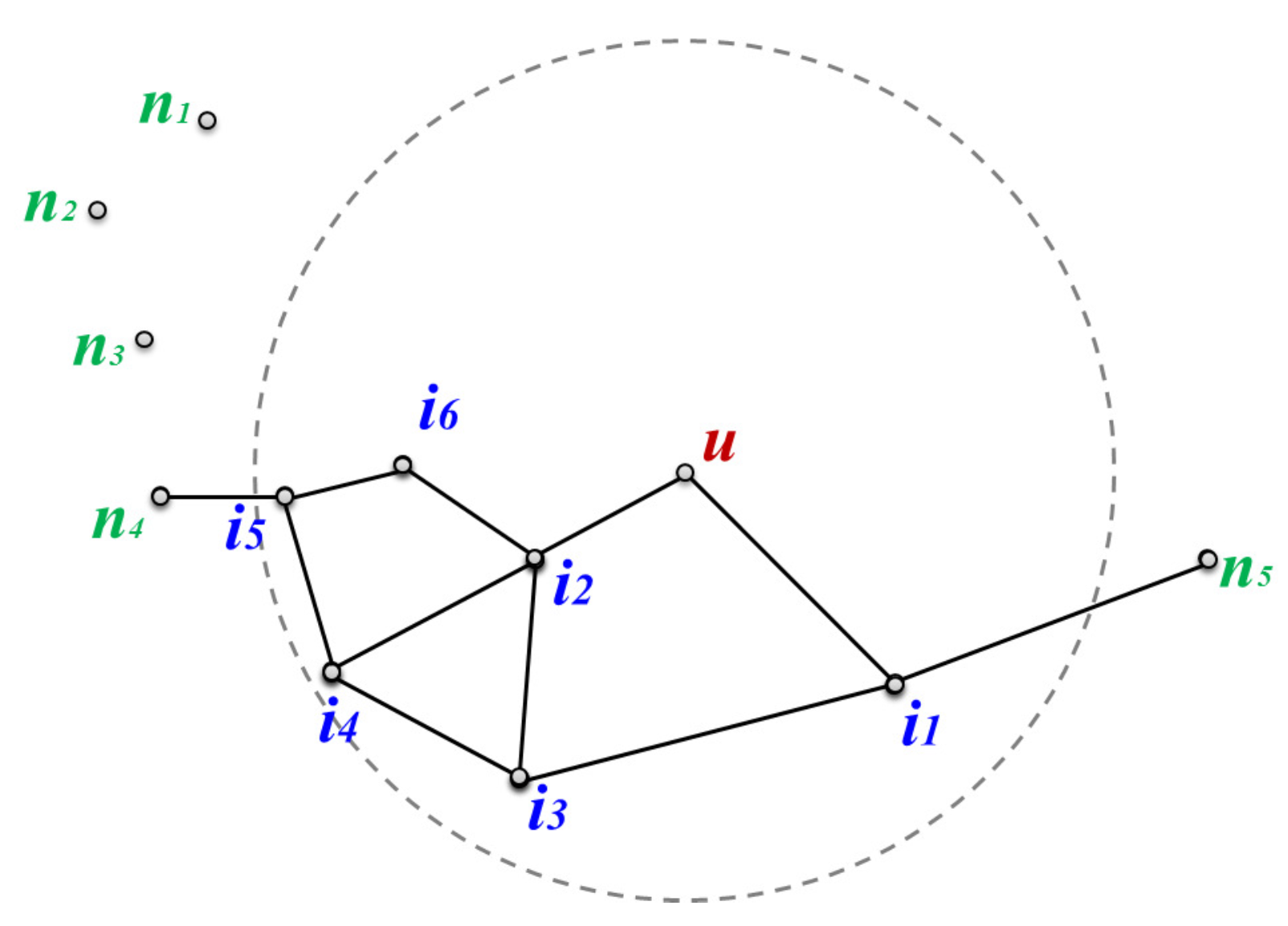
Figure 7 shows the local full GG within radio range of message transfer node
u, which is constructed using the edges in
Table 3.
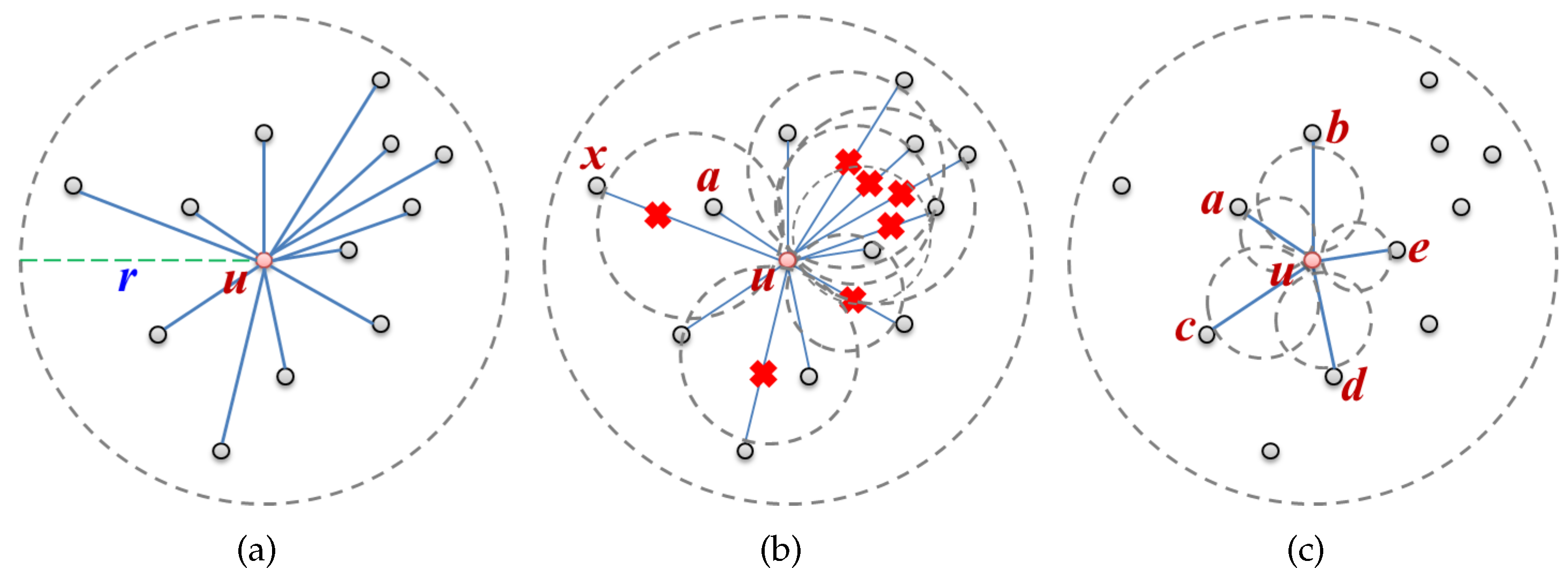
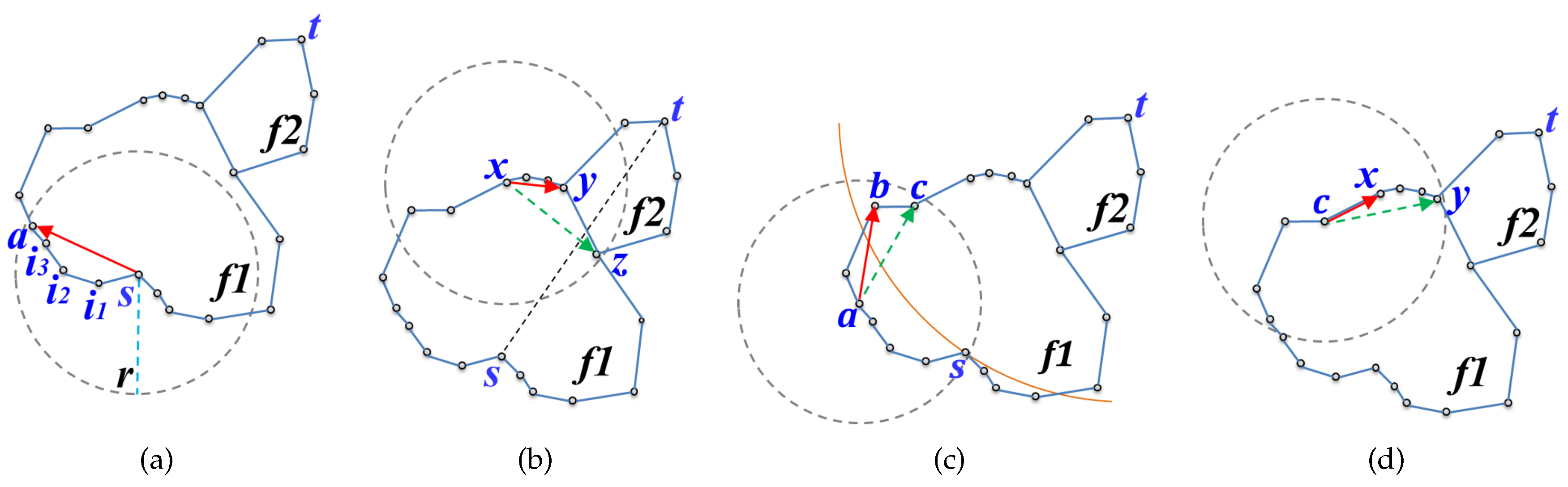
TEFR uses the generated edge list to determine the node to send the message to. In the discovery process, four cases need to be considered, as shown in
Figure 8. The first three cases are for direct forwarding to the remote node within radio range, and the last case is for sequential forwarding applied when the remaining power of the message transfer node is insufficient. For direct transmission, the first is when message forwarding occurs within the same face, the second is when a face change occurs, and the third is when the routing mode is switched from face routing to greedy routing.
In the first case, a message is sequentially transferred along the face within radio range and the change of face or routing mode does not occur during the routing. In this instance, the node located at the last hop of the face boundary within radio range is selected as the node where the message is to be sent to.
Figure 8a shows the case where a message is forwarded within the same face. TEFR selects node
a located at the farthest hop within radio range of message transfer node
s as the most remote node, and the message is sent to it.
The second case arises when a face change occurs while the message is forwarded within radio range because the line from the source to the destination and a face boundary edge intersect. In this case, TEFR transmits the message to the node where the intersecting line occurs, not the most distant hop node within radio range. After the selected node receives the message, it changes the face and routing is continued.
Figure 8b shows the case where the face is changed because the intersection between line
and
occurs while traveling to the face within radio range of message transfer node
x. If the message is sent to the most distant node
z without considering the face change at message transfer node
x, a loop occurs because the face change does not execute. Therefore, message transfer node
x forwards the message to node
y where the face change occurs, after which node
y changes the face and then continues routing.
The third case happens when it is necessary to switch to greedy routing while traveling to a face within radio range. TEFR immediately switches from face routing to greedy routing when greedy routing is enabled and it forwards a message according to greedy routing.
Figure 8c shows the case where the routing mode needs to be switched from face routing to greedy routing during face traversal within radio range. Message transfer node
a forwards the message to the first node
b closer to the destination (
t) than node
s where face routing started without sending a message to the farthest hop node
c on the face boundary within radio range. After receiving the message, node
b switches to greedy routing and performs message forwarding.
The last case occurs when the message transfer node has low residual power. A message is sent sequentially along the face boundary instead of being forwarded to the remote node. Because energy consumption increases as the distance to be transmitted increases in wireless communication [
27], the message transfer node sends the message to its nearest neighbor when the energy level is low to minimize power consumption. This extends the lifetime of the node and consequently prolongs the lifetime of the WSN. By selectively transmitting a message to the remote node or nearby nodes according to the remaining power, transfer efficiency can be improved while using the energy of each node in a balanced manner.
Figure 8d shows the case where the message transfer node has less energy than the threshold for direct transmission. Message transfer node
c can forward a message directly to remote node
y, but it sends the message to nearest node
x to minimize energy consumption.
Since TEFR can determine the routing path in advance within radio range using the full GG edge list, it can establish the most remote node where a message can be transferred most efficiently, and a message can be sent directly to the selected node. That is to say, TEFR can directly send a message without journeying via intermediate nodes by simulating routing internally using the edge list as in
Table 3 and selecting a remote node in the same way as actually traveling the nodes constituting the face within radio range.
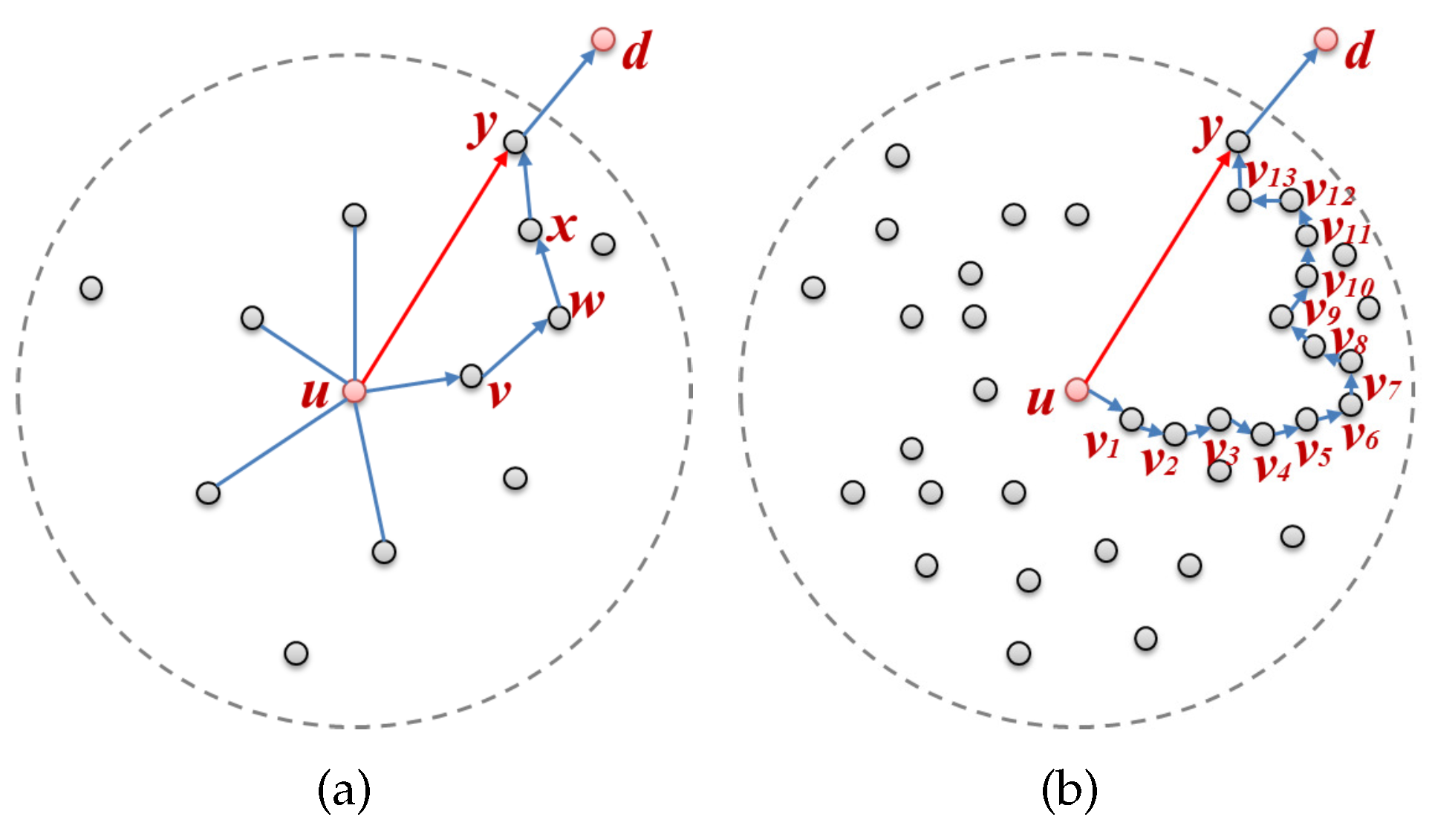
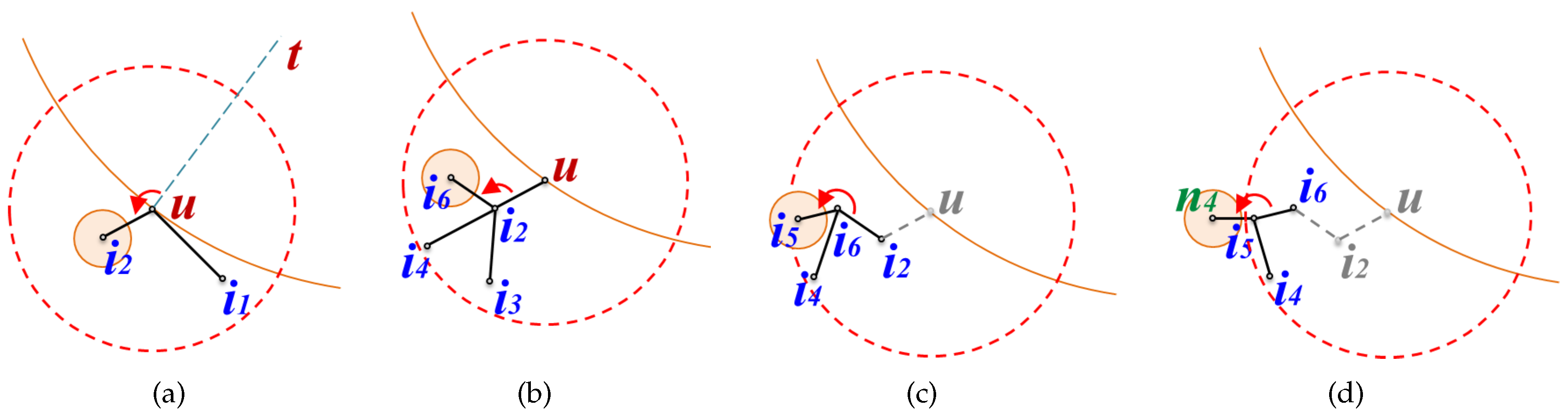
Figure 9 shows the internal process of node selection at the message transfer node required to send a message, which corresponds to the case of forwarding a message within the same face as in
Figure 8a. All the processes in
Figure 9 are performed internally at message transfer node
u, and after the process is finished, a message is forwarded to the selected node.
Figure 9a shows the beginning of the face routing simulation to establish the node where the message is to be sent to. Face routing is started at message transfer node
u because there is no node closer than itself to the destination (
t) among the neighbors. Node
u selects
as the next node to be explored by applying the left-hand rule based on line
among neighboring nodes
and
in the GG edge list in
Table 3.
In
Figure 9b, node
selects
as the next node to explore according to the left-hand rule, and checks whether it is within radio range of node
u, whether the routing mode should be switched to greedy routing, and whether an intersecting edge occurs. Node
is located within radio range of node
u, is farther from the destination than node
u where face routing started, and
does not intersect line
. Thus,
is selected as the next node to navigate to. In
Figure 9c,
is selected as the next node to travel to from node
in the face routing procedure according to the same condition as node
.
In
Figure 9d, node
, which is the next node along from node
, is beyond the radio range of message transfer node
u. Therefore, message transfer node
u terminates the node discovery process and selects
as the target node to send the message to. Message transfer node
u improves the transfer efficiency by sending a message directly to the most remote node
without actually passing through the intermediate nodes
and
. The pseudo-code for selecting the most remote node using the GG full edge list of a message transfer node and sending a message is as Algorithm 2.
4.4. Analysis
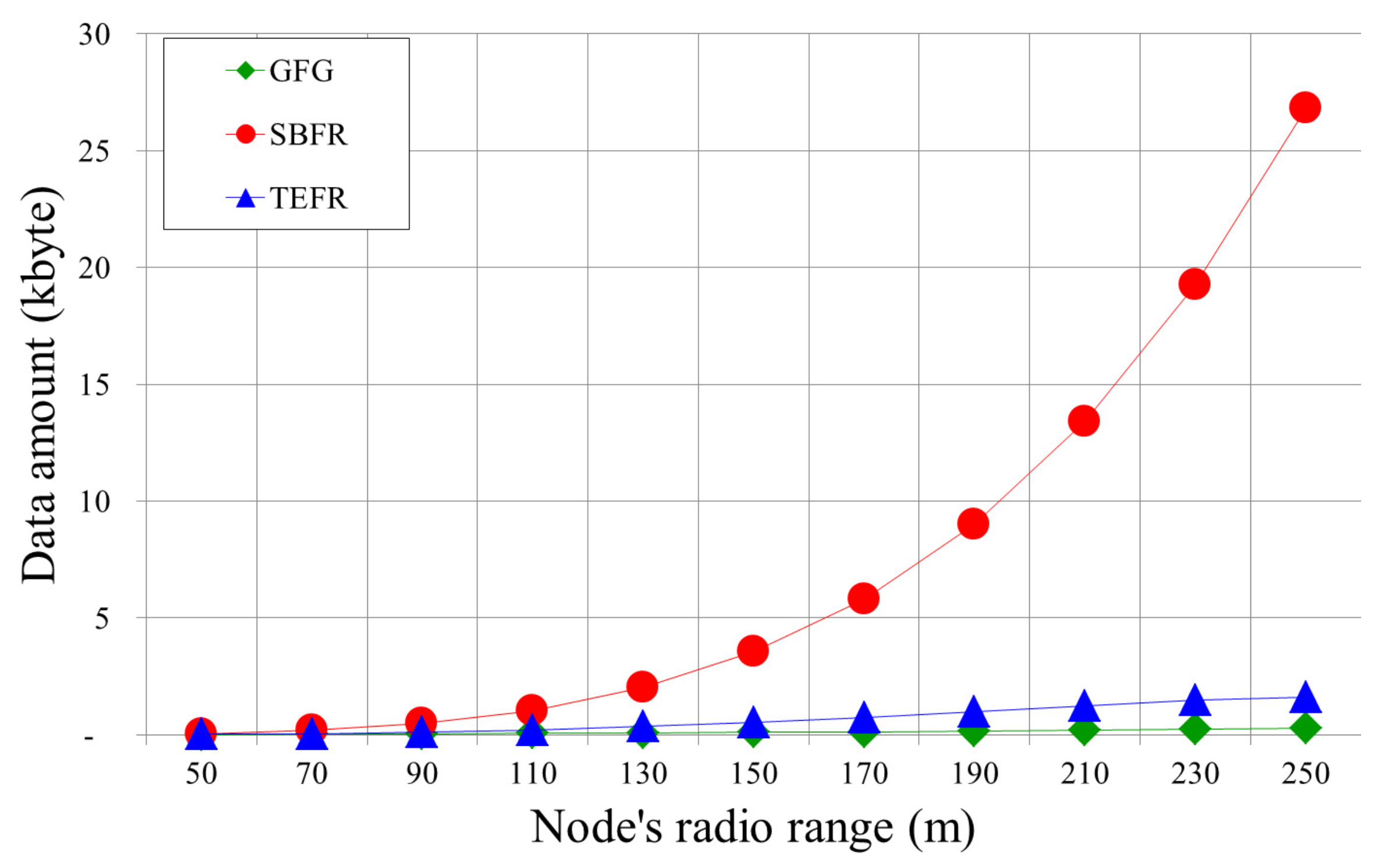
TEFR utilizing the local planar graphs of the message transfer node’s neighbors needs more location information compared with legacy face routing using local information but uses less position information than face routing using the information on all nodes within 2-hop range. Equation (
1) compares the quantity of location information transmitted to a message transfer node. In the equation, the left-hand side is legacy face routing, the middle is TEFR, and the right-hand side is face routing using 2-hop node information:
where
n is the average number of neighboring nodes per node,
m is the data size of location information for one node, and
is the ratio of nodes removed in planarization (
).
| Algorithm 2 Selecting the most remote node using the GG edge list and sending a message. |
: a node according to left hand rule : a current traversal node : a message transfer node : a node where face routing started : the power threshold for direct transmission
|
|
select of from GG edge list if ( the power level of < ) then send message to , exit end if while ( is located within radio range of ) do if ( is closer to the destination than ) then change mode to greedy routing send message to , exit else if (the edge between and intersects ) then send message to , exit else set with select of from GG edge list end if end while send message to , exit
|
In Equation (
1), in legacy face routing, a message transfer node only receives location information on the average number of neighboring nodes, while TEFR receives the location information on the immediate neighbors and their planar graph nodes after planarization. Face routing using 2-hop node information receives the location information on the immediate neighbors and all of their neighbors as well. The amount of location information required for TEFR is the same as that for face routing using 2-hop node information when nodes are not removed in the planarization step (
= 0) and becomes close to that of legacy face routing as the number of removed nodes increases.
In a high density WSN, TEFR does not rapidly increase the amount of position information to be transmitted because, even if the number of nodes increases, those removed by planarization increases and becomes bigger as the density of the nodes increases. TEFR uses the location information on more nodes than the legacy face routing to improve transfer efficiency, but it reduces the amount of position information in comparison with face routing using 2-hop node information because message transfer nodes only receive the information on the planar graph nodes of their neighbors.
The space complexity of a node for each face routing can be determined using Equation (
1).
,
, and
are respectively the space complexity of each node for legacy face routing using local information, face routing using 2-hop node information, and TEFR, where
n is the number of deployed nodes.
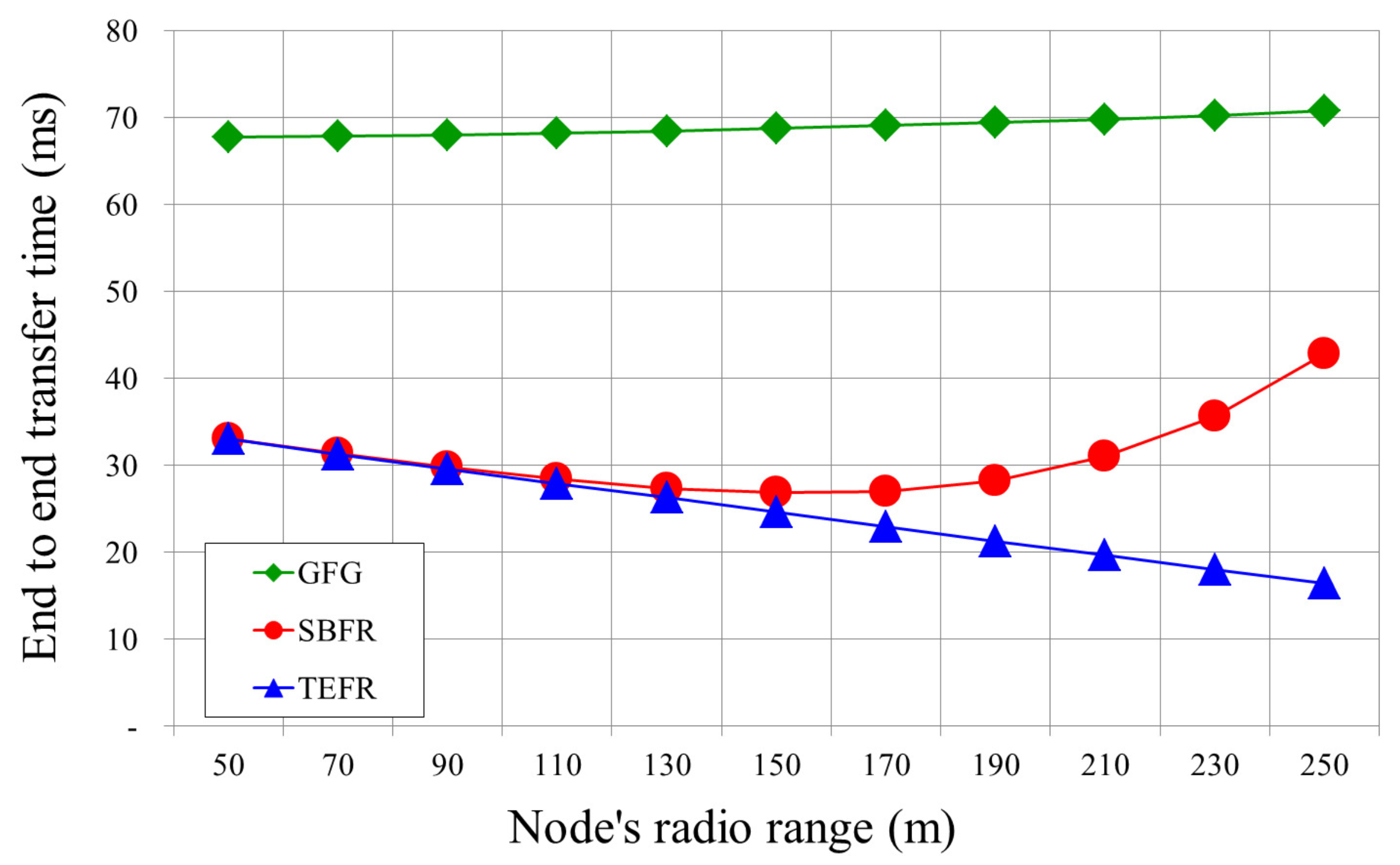
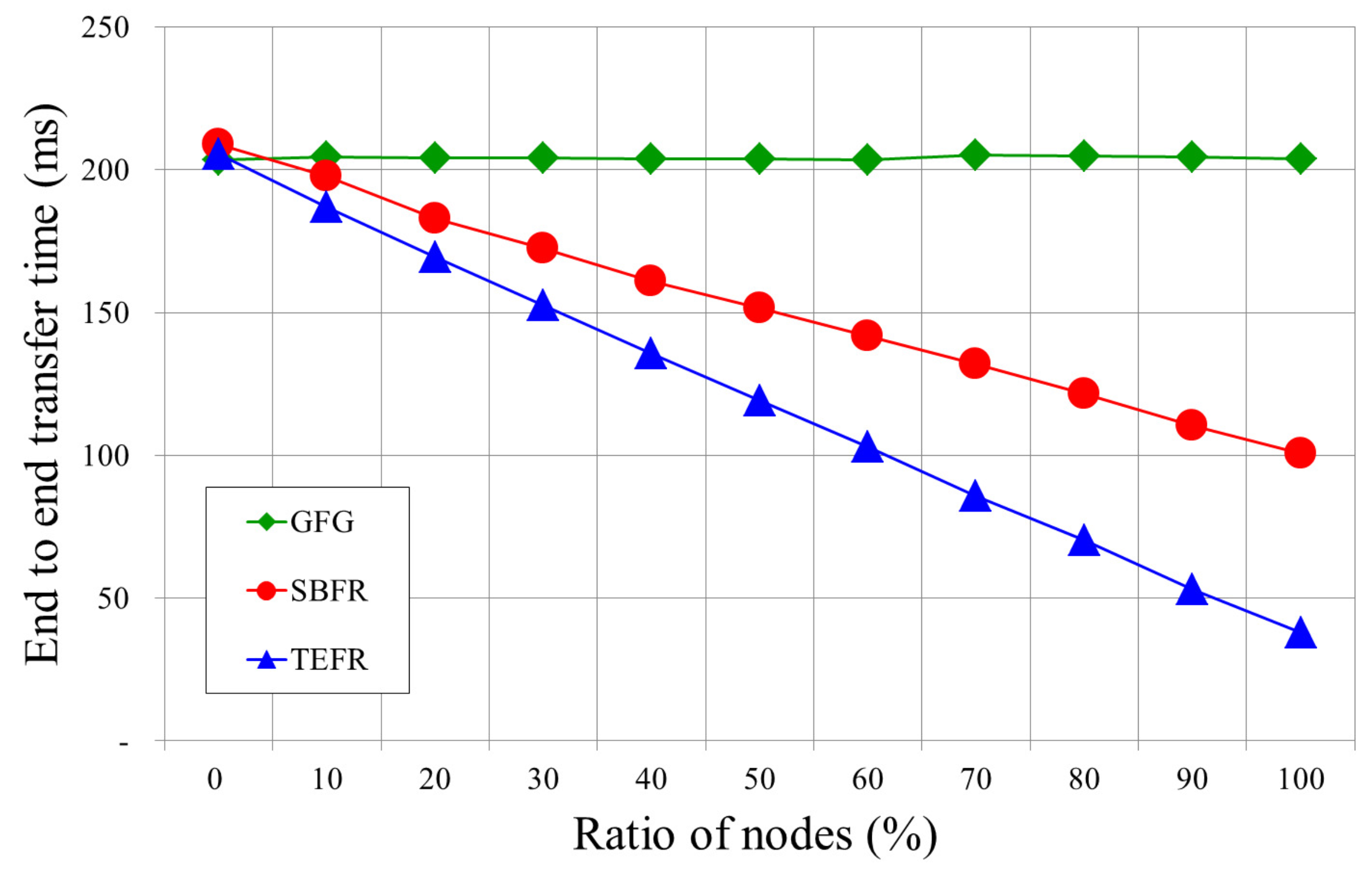
Equation (
2) compares the end-to-end delay of face routing within radio range. The first formula is the delay of legacy face routing, the second is that of face routing using 2-hop node information, and the last is that of TEFR:
End-to-end delay can be divided into propagation delay (
), transmission delay (
), processing delay (
), and queueing delay (
) [
28]; we divide
into the time (
) required to execute planarization for individual neighboring nodes and the time (
) for determining the node to which the message is to be sent. Furthermore, in the formulae,
n is the number of nodes on the face boundary to be traveled within radio range (
) and
k represents the average number of neighboring nodes.
In Equation (
2), since legacy face routing needs to sequentially travel the nodes on the face boundary, the end-to-end delay is highly influenced by the number of nodes constituting the face. However, TEFR and face routing using 2-hop node information are not affected by the number of nodes constituting the face because the message is forwarded directly to the most remote node within radio range.
Since face routing using 2-hop node information performs planarization on all edges within 2-hop range of the message transfer node, the execution time of planarization is required for the square of the number of neighboring nodes. On the other hand, TEFR only requires the execution time for planarization on the local nodes because it performs planarization independently on each neighboring node. As the number of deployed nodes increases, the performance of face routing using 2-hop node information decreases rapidly due to the increase in planarization time caused by squaring the number of neighboring nodes. In contrast, TEFR can forward a message without an abrupt decrease in performance because the planarization time is gradually prolonged in proportion to the number of neighboring nodes.
The time complexity of the computation time for message transmission can be inferred from Equation (
2). Each node used for legacy face routing using local information, face routing using 2-hop node information, and TEFR can determine the next node for forwarding a message in
,
, and
computation time respectively, where
k is the number of deployed nodes.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}