Dolphin Sounds-Inspired Covert Underwater Acoustic Communication and Micro-Modem




Abstract
:1. Introduction
2. Related Work
3. Modem Design
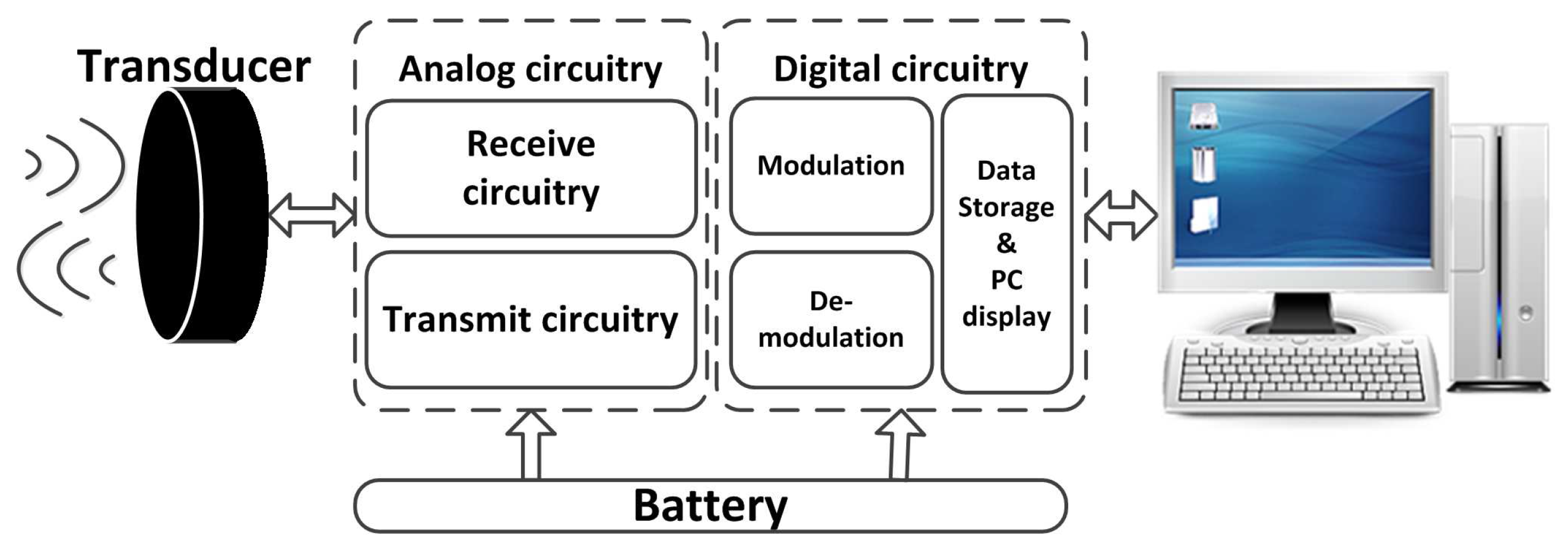
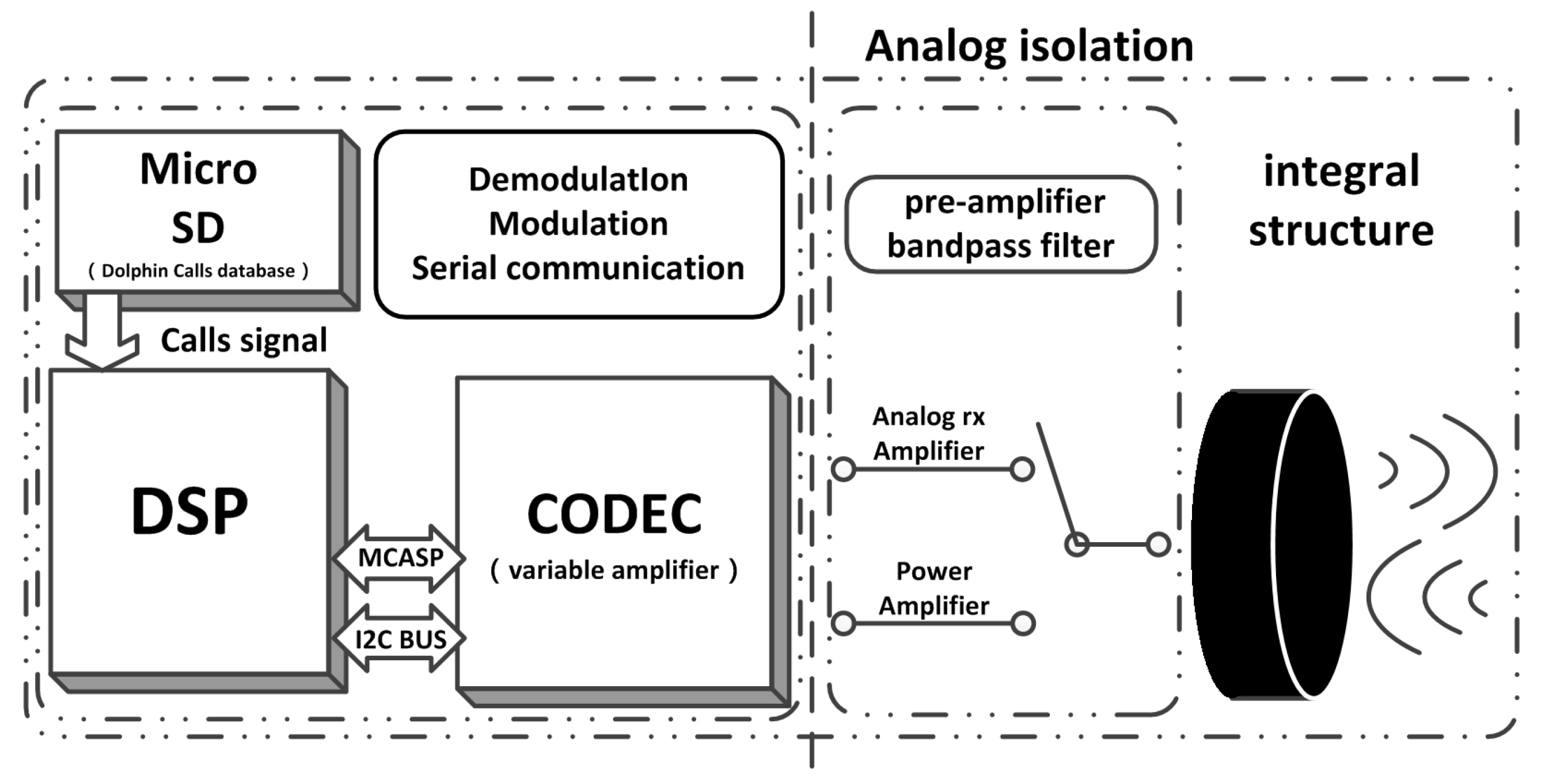
3.1. Modem Structure Design
3.2. Digital Domain Processing
3.2.1. Core Digital Signal Processor
3.2.2. Analog and Digital Signal Convertor
3.3. Analog Domain Processing at Transceiver
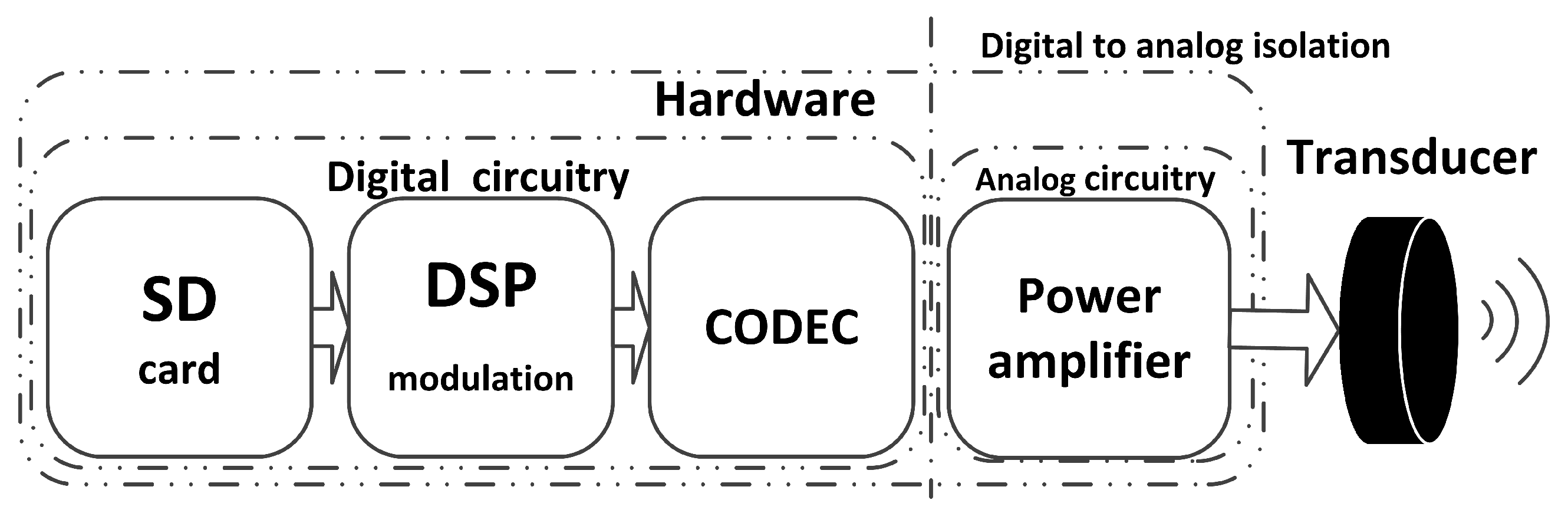
3.3.1. Power Amplifier
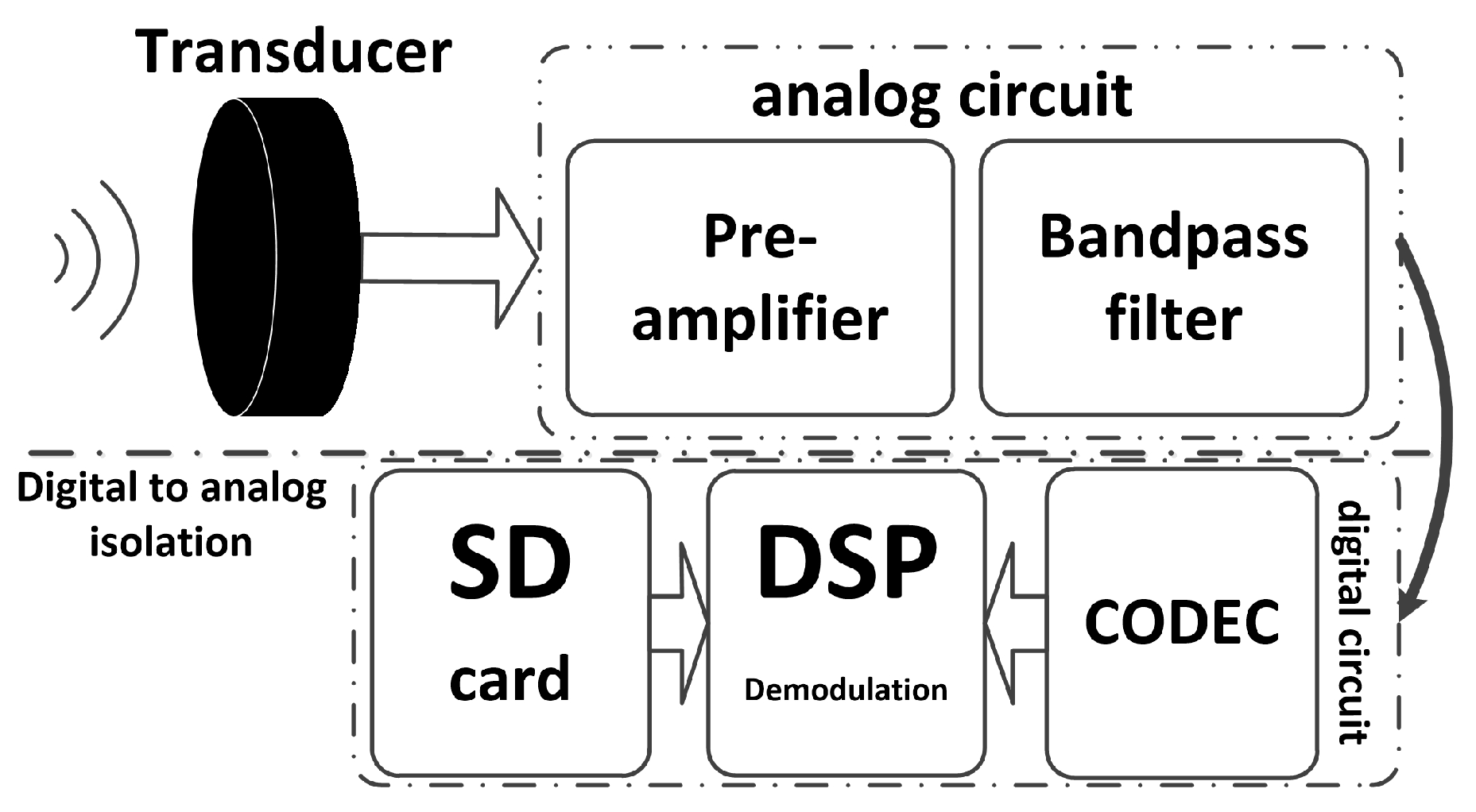
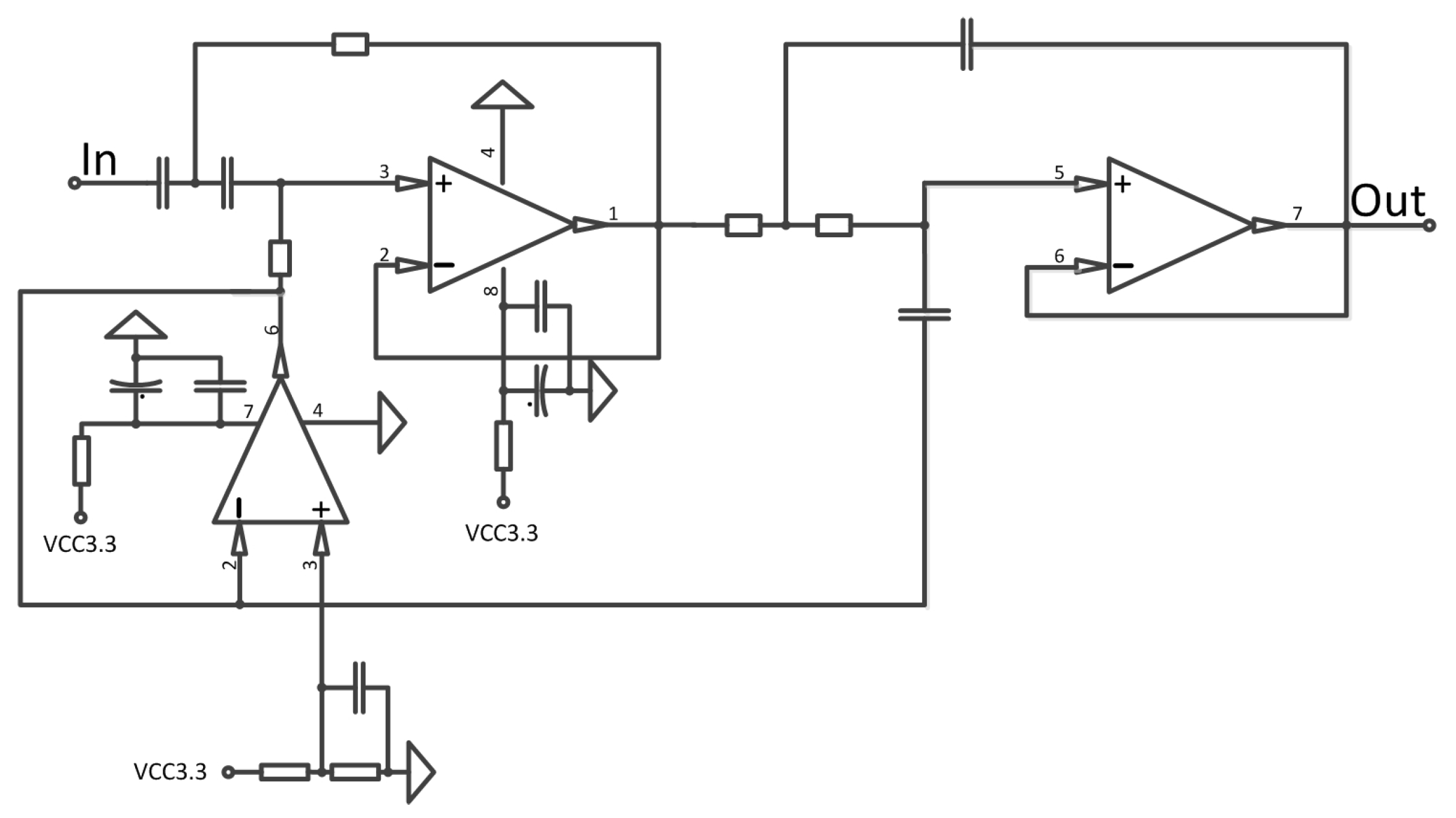
3.3.2. Analog Amplifier of Reception
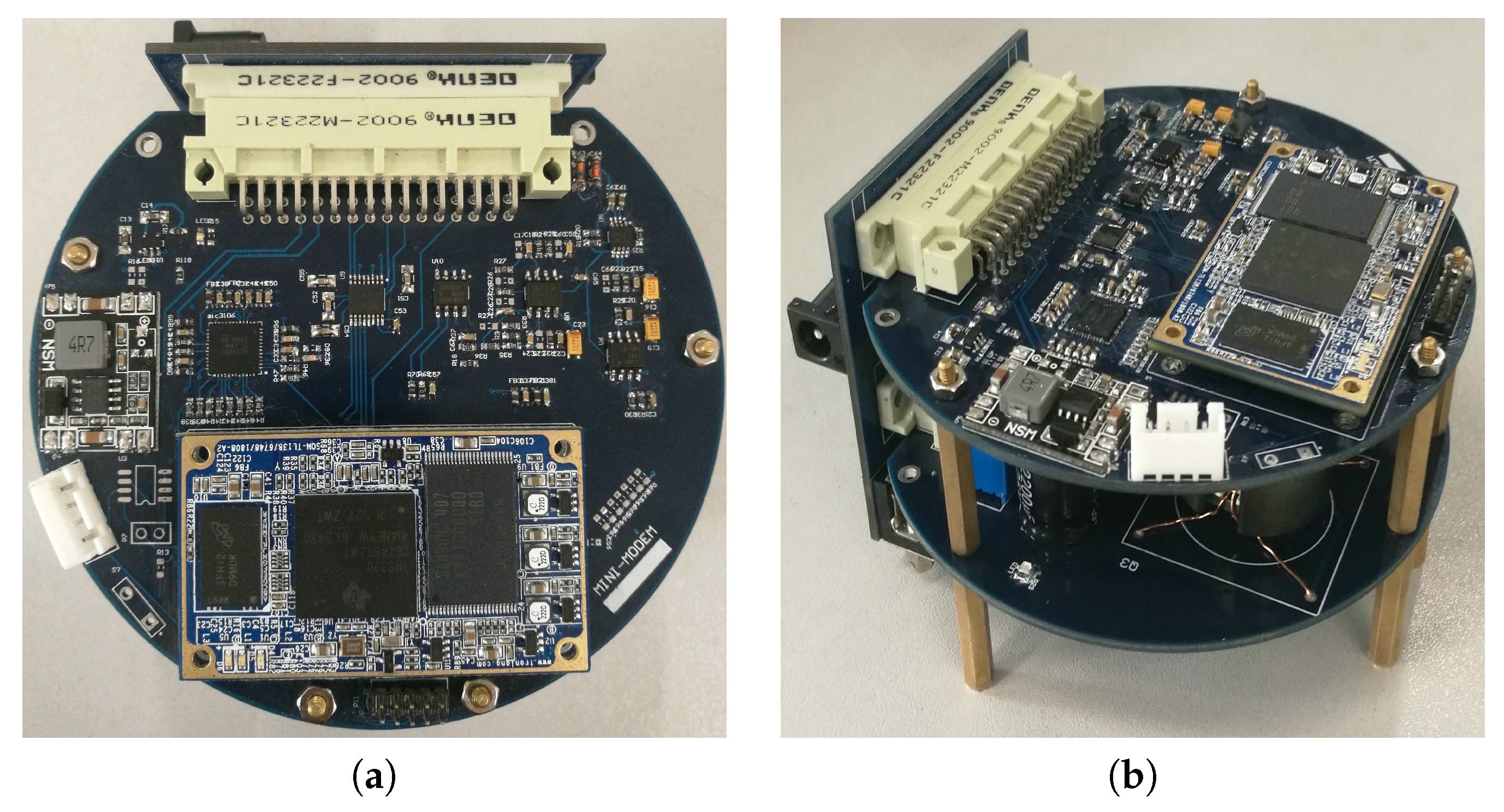
3.4. Implemented Micro-Modem
4. Bionic CUAC Scheme
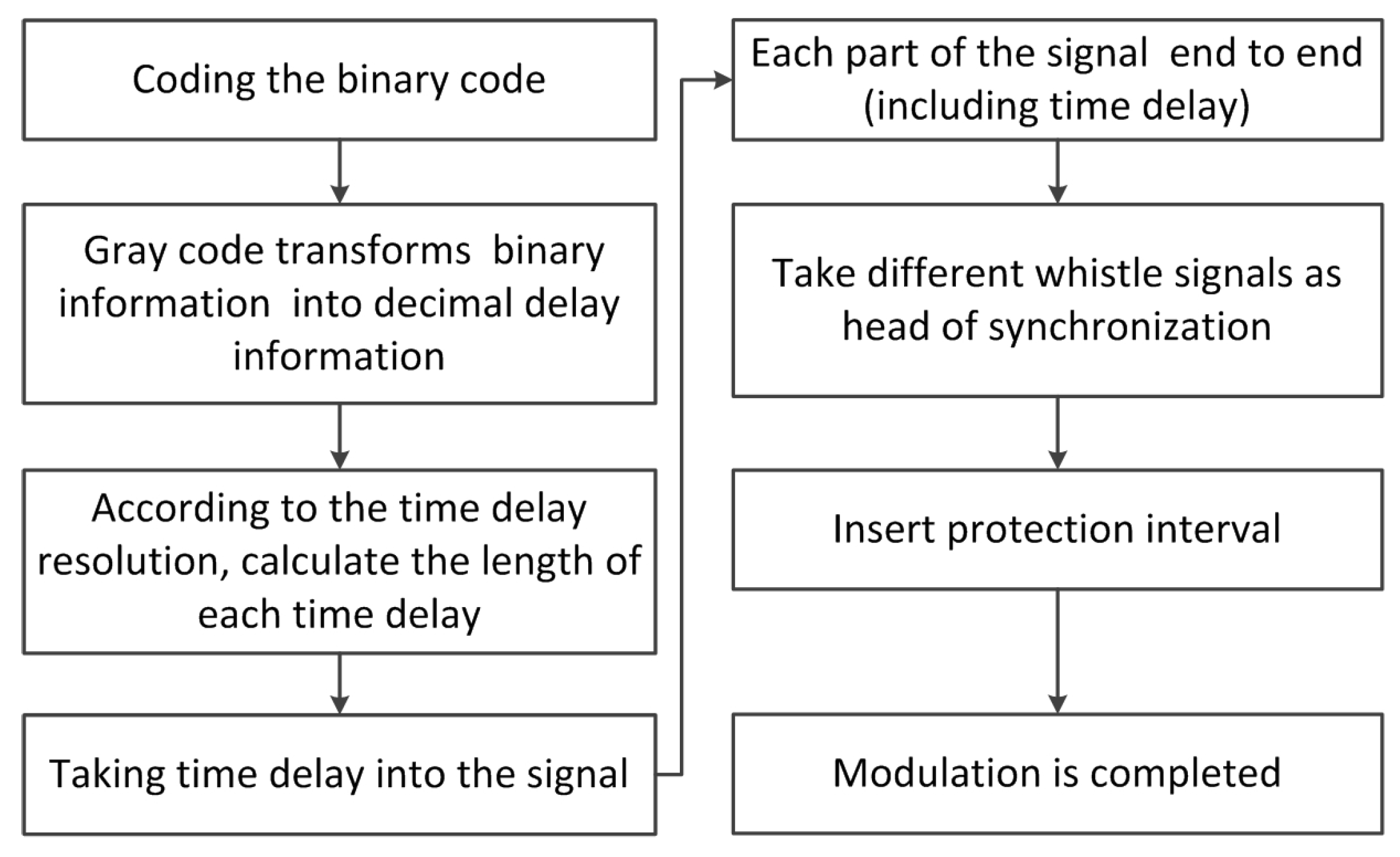
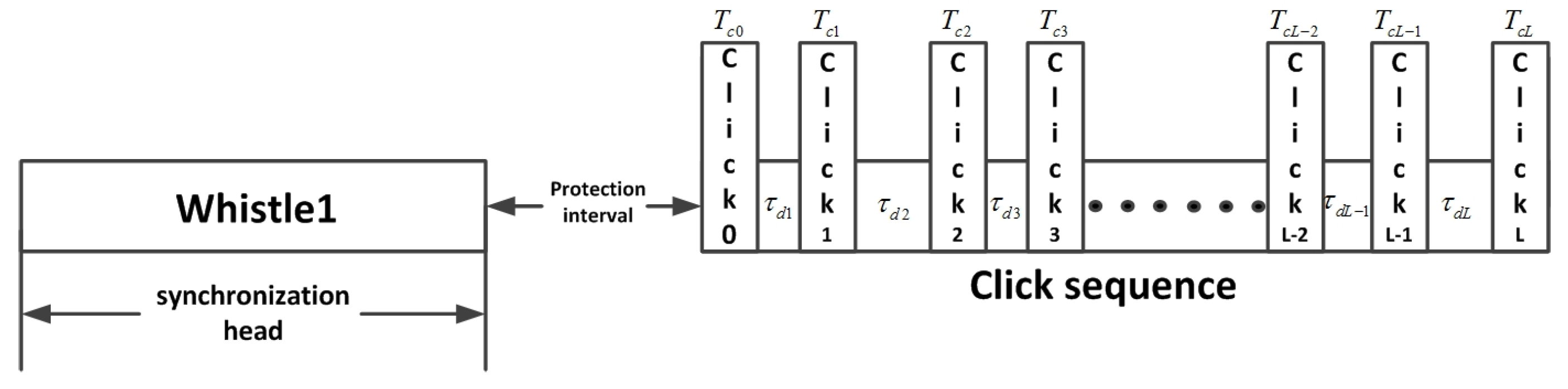
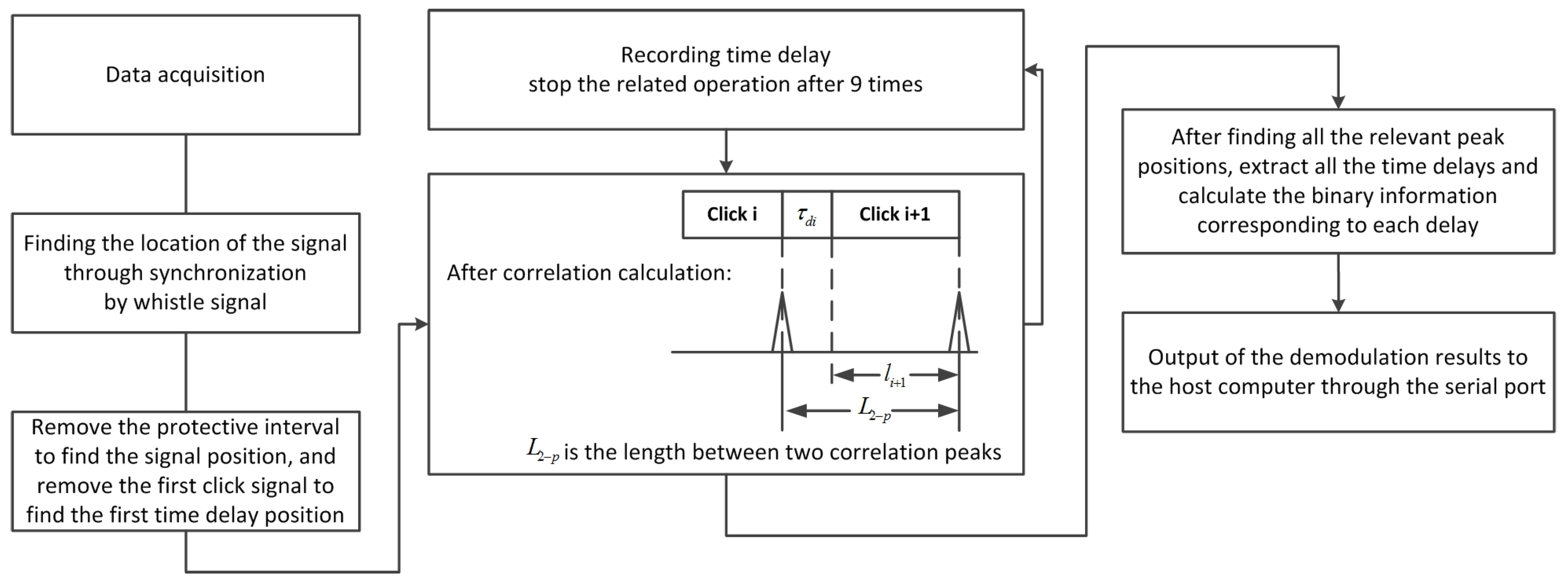
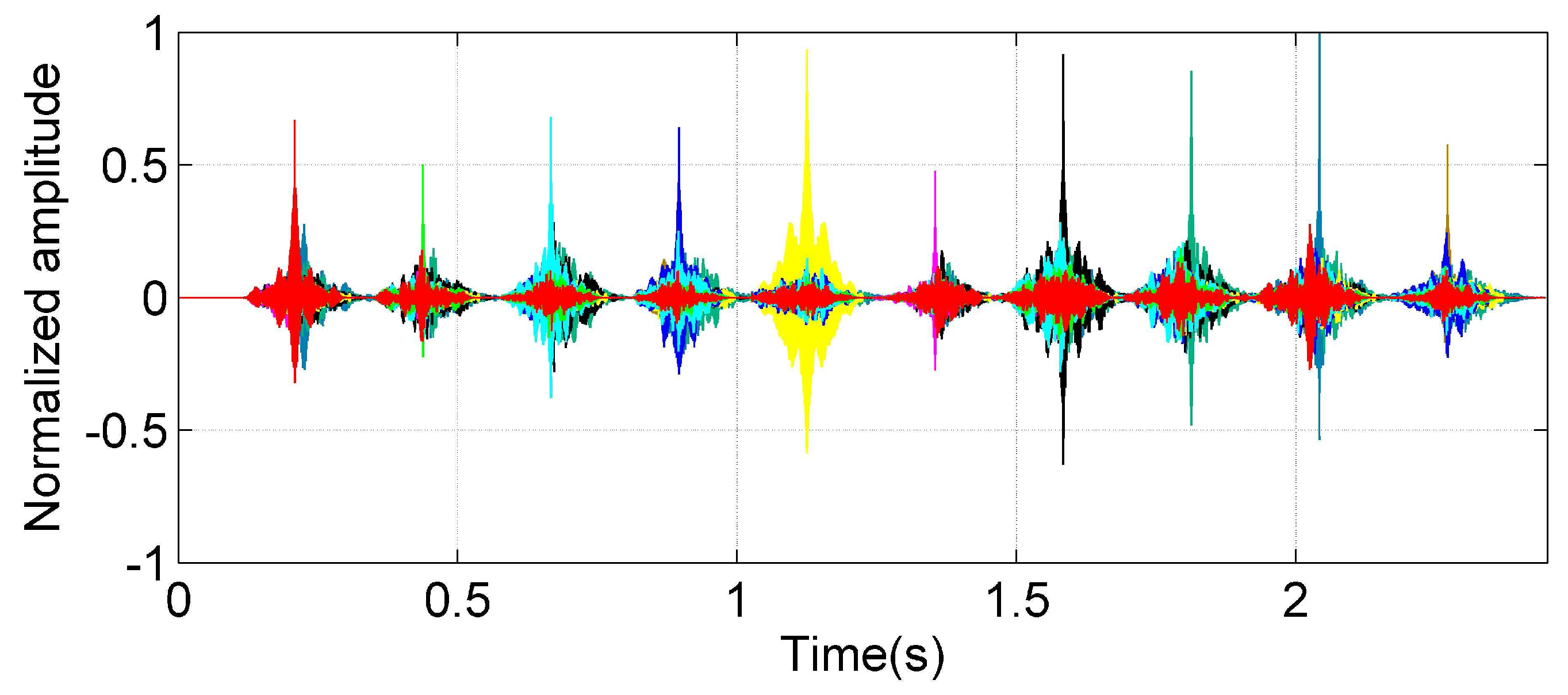
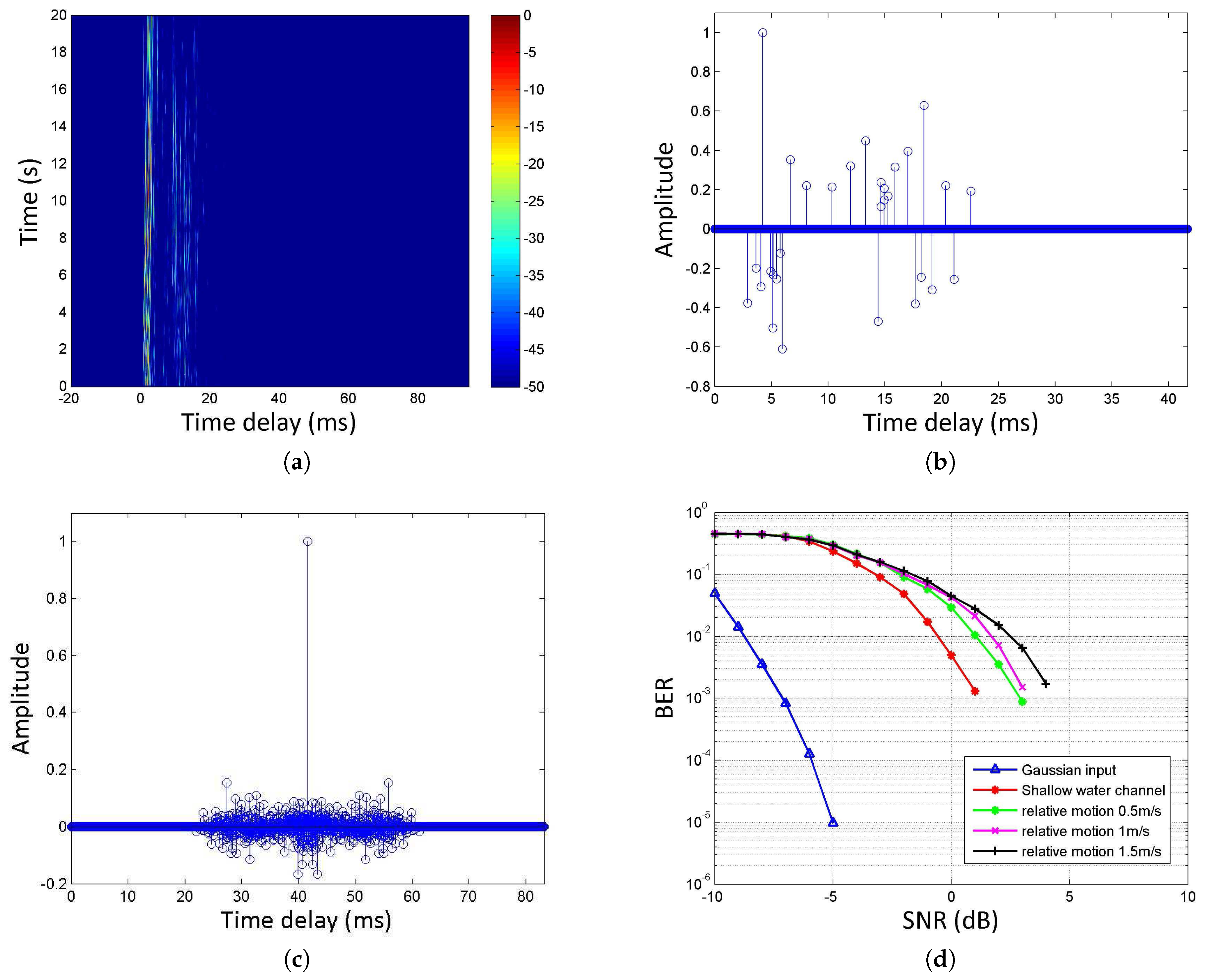
4.1. Algorithm Simulation and Realization
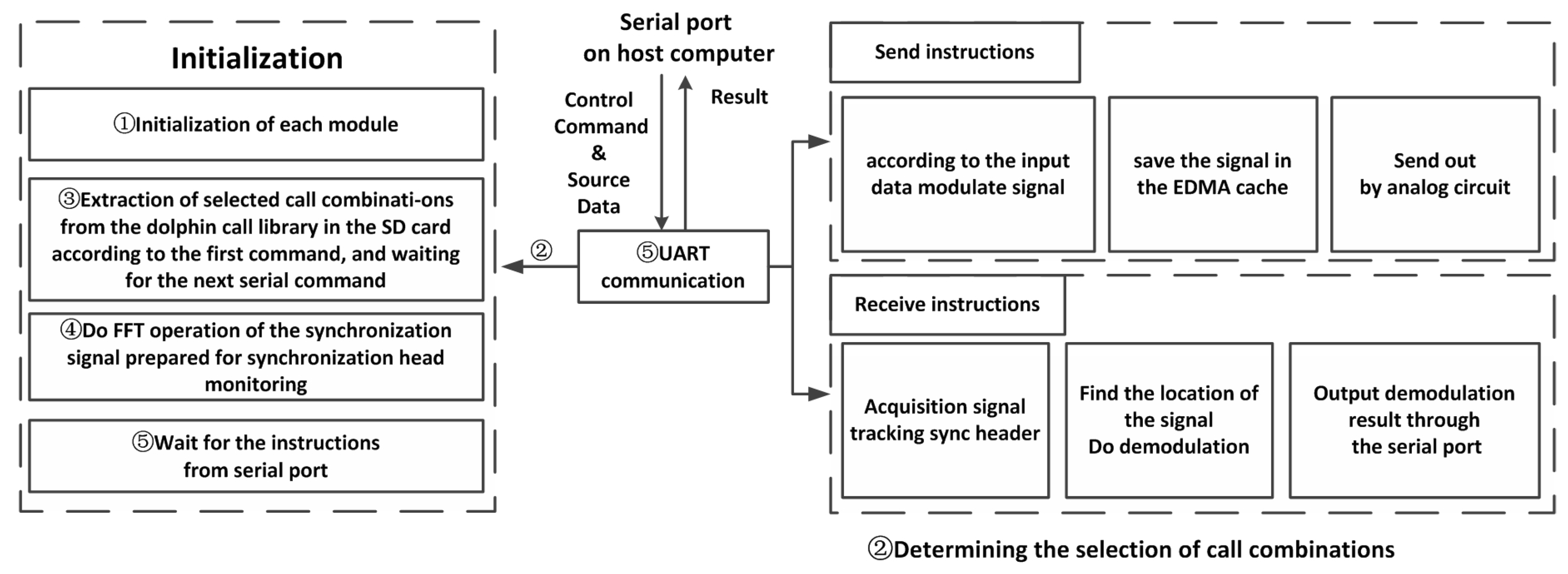
4.2. Software Workflow
5. Experiment Result
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Heidemann, J.; Stojanovic, M.; Zorzi, M. Underwater sensor networks: Applications, advances and challenges. Philos. Trans. 2012, 370, 158–175. [Google Scholar] [CrossRef] [PubMed]
- Chandrasekhar, V.; Seah, W.K.; Choo, Y.S.; Ee, H.V. Localization in Underwater Sensor Networks: Survey and Challenges. In Proceedings of the IEEE Signal Processing and Communications Applications Conference, Los Angeles, CA, USA, 25 September 2006; pp. 33–40. [Google Scholar]
- Sari, H.; Woodward, B. Underwater Acoustic Voice Communications Using Digital Pulse Position Modulation. In Proceedings of the 97th Oceans MTS/IEEE Conference, Halifax, NS, Canada, 6–9 October 1997; pp. 870–874. [Google Scholar] [CrossRef]
- Lei, L.; Xu, F. Study on underwater acoustic voice communication system for divers. J. Acoust. Soc. Am. 2012, 131, 3277. [Google Scholar] [CrossRef]
- Freitag, L.; Grund, M.; Singh, S.; Partan, J. The WHOI Micro-Modem: An Acoustic Communications and Navigation System for Multiple Platforms. In Proceedings of the Conference about Oceans, Washington, DC, USA, 17–23 September 2005; pp. 1086–1092. [Google Scholar] [CrossRef]
- Gallimore, E.; Partan, J.; Vaughn, I.; Singh, S. The WHOI Micromodem-2: A Scalable System for Acoustic Communications and Networking. In Proceedings of the Conference about Oceans, Washington, DC, USA, 20–23 September 2010; pp. 1–7. [Google Scholar] [CrossRef]
- Yan, H.; Wan, L.; Zhou, S.; Shi, Z.; Cui, J.H.; Huang, J.; Zhou, H. Dsp based receiver implementation for ofdm acoustic modems. Phys. Commun. 2012, 5, 22–32. [Google Scholar] [CrossRef]
- Aydinlik, M.; Ozdemir, A.T.; Stajanovic, M. A Physical Layer Implementation on Reconfigurable Underwater Acoustic Modem. In Proceedings of the Conference about Oceans, Quebec, Canada, 15–18 September 2008; pp. 1–4. [Google Scholar] [CrossRef]
- Neasham, J.A.; Goodfellow, G.; Sharphouse, R. Development of the “Seatrac” Miniature Acoustic Modem and USBL Positioning Units for Subsea Robotics and Diver Applications. In Proceedings of the Conference about Oceans, Genoa, Italy, 18–21 May 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Qiao, G.; Liu, S.Z.; Zhou, F.; Sun, Z.X. Experimental study of long-range shallow water acoustic communication based on ofdm-modem. Adv. Mater. Res. 2012, 546–547, 1308–1313. [Google Scholar] [CrossRef]
- Liu, S.; Lu, M.; Hui, L.; Chen, T.; Gang, Q. Design and Implementation of OFDM Underwater Acoustic Communication Algorithm Based on OMAP-L138. In Proceedings of the International Conference on Underwater Networks & Systems, Rome, Italy, 12–14 November 2014; p. 12. [Google Scholar] [CrossRef]
- Ma, L.; Qiao, G.; Liu, S. HEU OFDM-modem for Underwater Acoustic Communication and Networking. In Proceedings of the International Conference on Underwater Networks & Systems, Rome, Italy, 12–14 November 2014; p. 14. [Google Scholar] [CrossRef]
- Wills, J.; Ye, W.; Heidemann, J. Low-Power Acoustic Modem for Dense Underwater Sensor Networks. In Proceedings of the First ACM International Workshop on UnderWater Networks (WUWNet), Los Angeles, CA, USA, 25 September 2006; pp. 79–85. [Google Scholar] [CrossRef]
- Vasilescu, I.; Detweiler, C.; Rus, D. Aquanodes: An Underwater Sensor Network. In Proceedings of the Workshop on Underwater Networks, Montreal, QC, Canada, 14 September 2007; pp. 85–88. [Google Scholar] [CrossRef]
- Parsons, G.S.; Peng, S.; Dean, A.G. An ultrasonic communication system for biotelemetry in extremely shallow waters. In Proceedings of the Workshop on Underwater Networks, San Francisco, CA, USA, 15 September 2008; pp. 99–102. [Google Scholar] [CrossRef]
- Cario, G.; Casavola, A.; Lupia, M.; Rosace, C. Seamodem: A Low-Cost Underwater Acoustic Modem for Shallow Water Communication. In Proceedings of the Conference about Oceans, Genoa, Italy, 18–21 May 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Li, B.; Huang, J.; Zhou, S.; Ball, K.; Stojanovic, M.; Freeitag, L.; Willett, P. MIMO-OFDM for high-rate underwater acoustic communications. IEEE J. Ocean. Eng. 2009, 34, 634–644. [Google Scholar] [CrossRef]
- Liu, S.Z.; Qiao, G.; Ismail, A. Covert underwater acoustic communication using dolphin sounds. J. Acoust. Soc. Am. 2013, 133, EL300-6. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.Z.; Ma, T.L.; Qiao, G.; Ma, L.; Yin, Y.L. Biologically inspired covert underwater acoustic communication by mimicking dolphin whistles. Appl. Acoust. 2017, 120, 120–128. [Google Scholar] [CrossRef]
- Han, X.; Yin, J.W.; Guo, L.X.; Zhang, X. Research on bionic underwater acoustic communication technology based on differential Pattern time delay shift coding and dolphin whistles. Physics 2013, 62, 1–6. [Google Scholar] [CrossRef]
- Elmoslimany, A.; Zhou, M.; Duman, T.M.; Papandreou-Suppappola, A. An underwater acoustic communication scheme exploiting biological sounds. Wirel. Commun. Mob. Comput. 2016, 16, 2194–2211. [Google Scholar] [CrossRef]
- Elmoslimany, A.; Zhou, M.; Duman, T.M.; Papandreou-Suppappola, A. A New Signaling Scheme for Underwater Acoustic Communications. In Proceedings of the Conference about Oceans, San Diego, CA, USA, 23–27 September 2014; pp. 529–540. [Google Scholar] [CrossRef]
- Nam, H.; An, S. An Ultrasonic Sensor Based Low-Power Acoustic Modem for Underwater Communication in Underwater Wireless Sensor Networks. Lect. Notes Comput. Sci. 2007, 4809, 494–504. [Google Scholar] [CrossRef]
- Won, T.H.; Park, S.J. Design and Implementation of an Omni-Directional Underwater Acoustic Micro-Modem Based on a Low-Power Micro-Controller Unit. Sensors 2012, 12, 2309–2323. [Google Scholar] [CrossRef] [PubMed]
- Antonio, S.; Sara, B.; Pedro, Y.; Angel, P.; José, S.J. An Ultra-Low Power and Flexible Acoustic Modem Design to Develop Energy-Efficient Underwater Sensor Networks. Sensors 2012, 12, 6837–6856. [Google Scholar] [CrossRef]
- Sanchez, A.; Blanc, S.; Yuste, P.; Serrano, J.J. A low cost and high efficient acoustic modem for underwater sensor networks. In Proceedings of the Conference about Oceans, Santander, Spain, 6–9 June 2011; pp. 1–10. [Google Scholar] [CrossRef]
- Benson, B.; Li, Y.; Kastner, R.; Faunce, B. Design of a low-cost, underwater acoustic modem for short-range sensor networks. In Proceedings of the Conference about Oceans, Sydney, Auatralia, 24–27 May 2010; pp. 1–9. [Google Scholar] [CrossRef]
- Benson, B.; Li, Y.; Faunce, B.; Domond, K.; Kimball, D.; Schurgers, C.; Kastner, R. Design of a low-cost underwater acoustic modem. IEEE Embed. Syst. Lett. 2010, 2, 58–61. [Google Scholar] [CrossRef]
- Teledyne Benthos Coustic Modems Features. Available online: http://www.teledynemarine.com/960-series-atm-966?BrandID=2 (accessed on 17 June 2017).
- Underwater Acoustic Modems Features. Available online: http://link-quest.com/html/models1.htm (accessed on 17 June 2017).
- EvoLogics Acoustic Modems Features. Available online: https://www.evologics.de/en/products/acoustics/index.html (accessed on 17 June 2017).
- Sendra, S.; Lloret, J.; Jimenez, J.M.; Parra, L. Underwater Acoustic Modems. IEEE Sens. J. 2016, 16, 4063–4071. [Google Scholar] [CrossRef]
- Lloret, J. Underwater Sensor Nodes and Networks. Sensors 2013, 13, 11782–11796. [Google Scholar] [CrossRef] [PubMed]
- Texas Instruments. TLV320AIC3106EVM-PDK—User Guide. Available online: http://www.ti.com.cn/product/cn/TLV320AIC3106/technicaldocuments (accessed on 12 September 2016).
- Texas Instruments. TMS320C6748 DSP Technical Reference Manual. Available online: http://www.ti.com.cn/product/cn/TMS320C6748/technicaldocuments (accessed on 12 September 2016).
- Cotter, S.F.; Rao, B.D. Sparse channel estimation via matching pursuit with application to equalization. IEEE Trans. Commun. 2002, 50, 374–377. [Google Scholar] [CrossRef]
- Yin, J.; Wang, Y.; Wang, L.; Hui, J. Multiuser underwater acoustic communication using single-element virtual time reversal mirror. Chin. Sci. Bull. 2009, 54, 1302–1310. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Underwater Acousitc Modem | Modulation | Areas of Application | Characteristics |
|---|---|---|---|
| Teledyne Benthos Atm 9xx [29] | PSK\MFSK | Remote Monitoring of Oceanographic Sensors Command of AUVs | Directional or Omni-directional High Data Rate |
| LinkQuest UWM series [30] | - | Short to Long Distance Communication Near-vertical or horizontal environments | Low Power Consumption Directional or Omni-directional High Data Rate |
| EvoLogics S2C M HS [31] | - | Short-range Shallow Waters Communication and Positioning for AUVs Diver tracking systems | Ultra-high-speed Smaller and Lighter |
| EvoLogics S2C R 7/17W [31] | - | Long-range Applications Underwater Observatories | Low Power Consumption Hemispherical Beam Pattern Long-term Deployment |
| WHOI micro-modem [5] | FH-FSK\PSK | UAC Navigation Subsystem | Variable Rate PSK Low Rate FH-FSK Long Base Line Navigation Narrow-band and Broadband |
| [23] | ASK | UWSN | Low Power Consumption Ultrasonic Wave Energy-aware Low Cost |
| [24] | ASK | UWSN | Omni-directional Beam Patter Low Power Consumption Low Cost Small Size |
| [25] | FSK | Long-life Short/Medium Range UWSN | Ultra-low Power Consumption Energy-efficient Low Cost |
| [26] | FSK | UWSN | High Efficient Low Cost Small Size |
| Our PBC modem | Unconventional mode | Short-range Covert Application Between Divers or UUVs | Covert Acoustic Communication by using Real or Mimetic- Cetacean Sounds Small size |
| Signal | c1 | c2 | c3 | c4 | c5 | c6 | c7 | c8 | c9 | c10 |
|---|---|---|---|---|---|---|---|---|---|---|
| c1 | 1 | 0.13 | 0.15 | 0.11 | 0.17 | 0.13 | 0.38 | 0.16 | 0.24 | 0.16 |
| c2 | 0.23 | 1 | 0.22 | 0.16 | 0.27 | 0.16 | 0.29 | 0.23 | 0.30 | 0.41 |
| c3 | 0.22 | 0.19 | 1 | 0.23 | 0.28 | 0.14 | 0.24 | 0.31 | 0.37 | 0.20 |
| c4 | 0.17 | 0.15 | 0.25 | 1 | 0.37 | 0.07 | 0.17 | 0.42 | 0.25 | 0.15 |
| c5 | 0.14 | 0.13 | 0.16 | 0.19 | 1 | 0.07 | 0.13 | 0.15 | 0.20 | 0.18 |
| c6 | 0.20 | 0.15 | 0.15 | 0.07 | 0.14 | 1 | 0.17 | 0.22 | 0.16 | 0.09 |
| c7 | 0.43 | 0.19 | 0.18 | 0.12 | 0.17 | 0.11 | 1 | 0.37 | 0.14 | 0.15 |
| c8 | 0.20 | 0.15 | 0.24 | 0.31 | 0.22 | 0.16 | 0.39 | 1 | 0.20 | 0.15 |
| c9 | 0.20 | 0.15 | 0.22 | 0.14 | 0.21 | 0.09 | 0.11 | 0.15 | 1 | 0.27 |
| c10 | 0.18 | 0.28 | 0.16 | 0.11 | 0.25 | 0.07 | 0.16 | 0.15 | 0.36 | 1 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, G.; Zhao, Y.; Liu, S.; Bilal, M. Dolphin Sounds-Inspired Covert Underwater Acoustic Communication and Micro-Modem. Sensors 2017, 17, 2447. https://doi.org/10.3390/s17112447
Qiao G, Zhao Y, Liu S, Bilal M. Dolphin Sounds-Inspired Covert Underwater Acoustic Communication and Micro-Modem. Sensors. 2017; 17(11):2447. https://doi.org/10.3390/s17112447
Chicago/Turabian StyleQiao, Gang, Yunjiang Zhao, Songzuo Liu, and Muhammad Bilal. 2017. "Dolphin Sounds-Inspired Covert Underwater Acoustic Communication and Micro-Modem" Sensors 17, no. 11: 2447. https://doi.org/10.3390/s17112447
APA StyleQiao, G., Zhao, Y., Liu, S., & Bilal, M. (2017). Dolphin Sounds-Inspired Covert Underwater Acoustic Communication and Micro-Modem. Sensors, 17(11), 2447. https://doi.org/10.3390/s17112447