A Laboratory Experimental Study: An FBG-PVC Tube Integrated Device for Monitoring the Slip Surface of Landslides


Abstract
:1. Introduction
2. Monitoring Device Design
3. Monitoring Theory
3.1. Monitoring Principle of FBG
3.2. Relationship between PVC Tube and Slip Surface Location
4. Slope Model Test
4.1. Properties of PVC Tube and FBGs
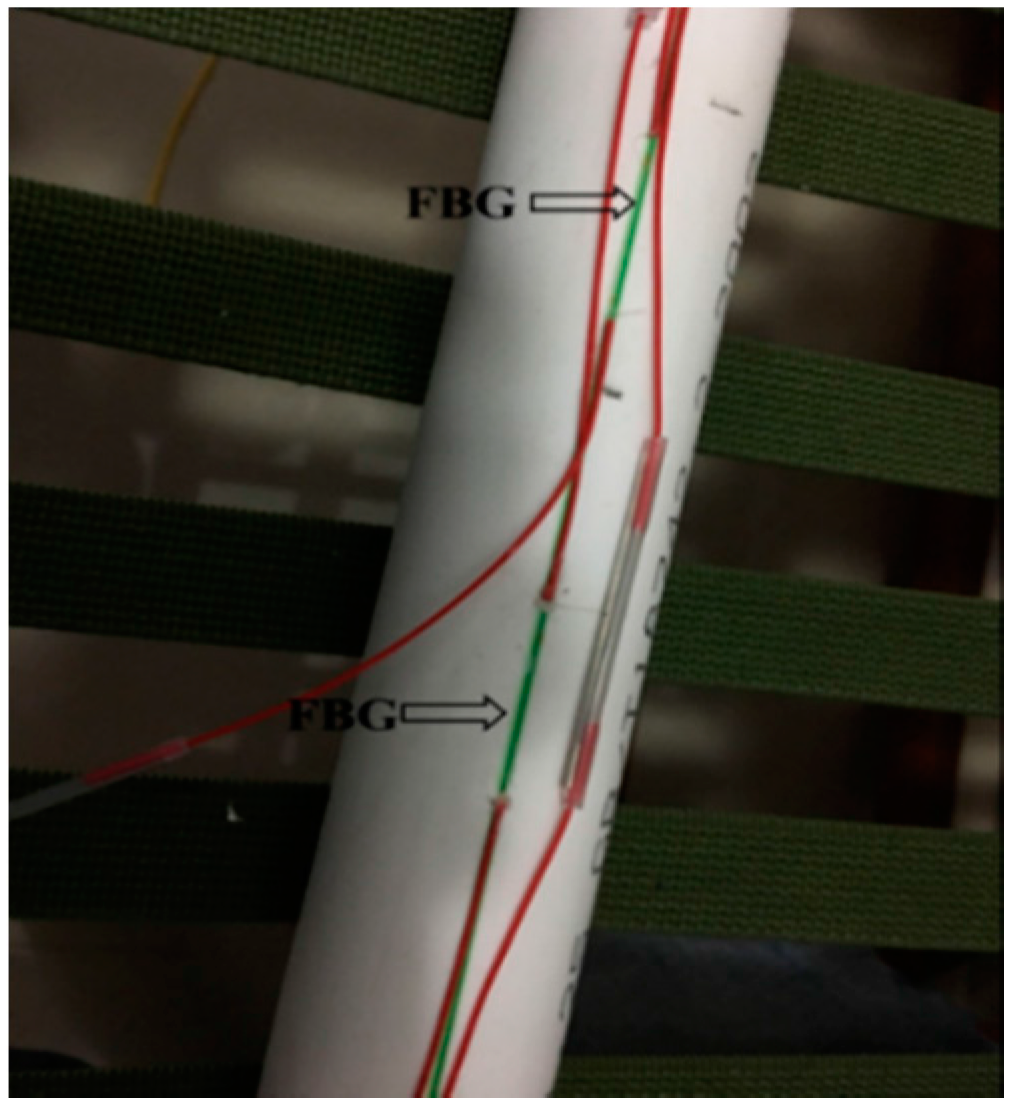
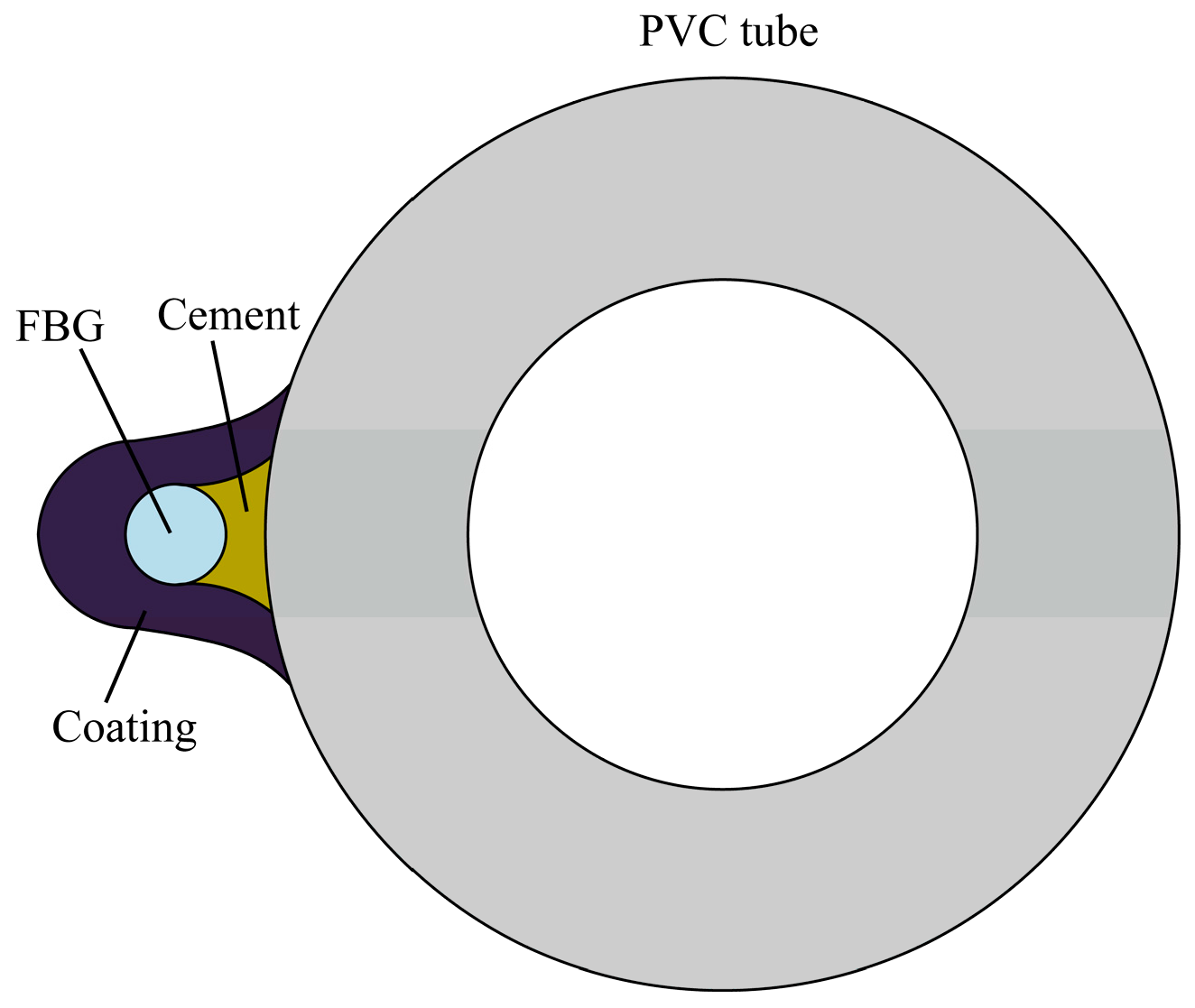
4.2. Installation of FBGs
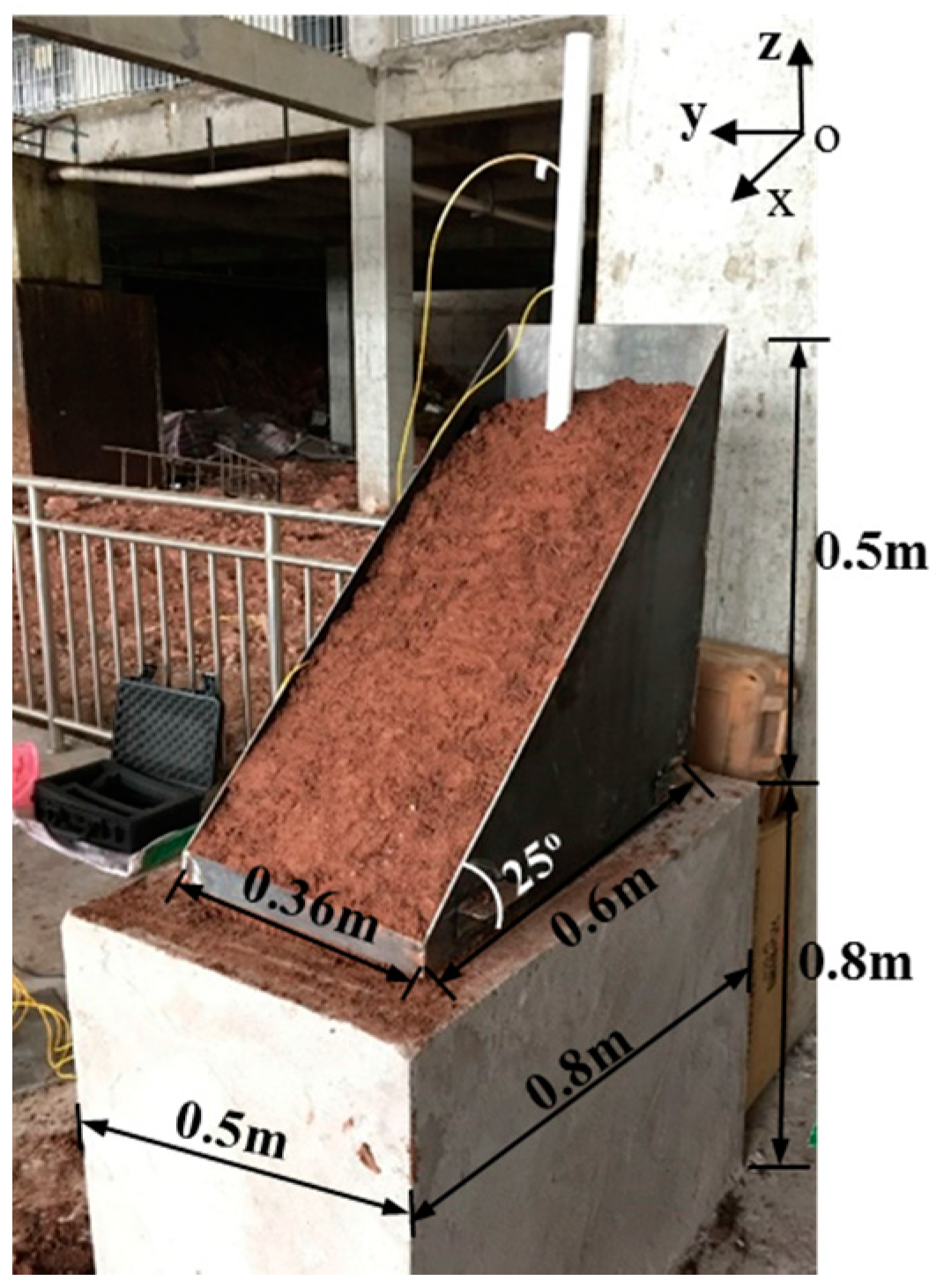
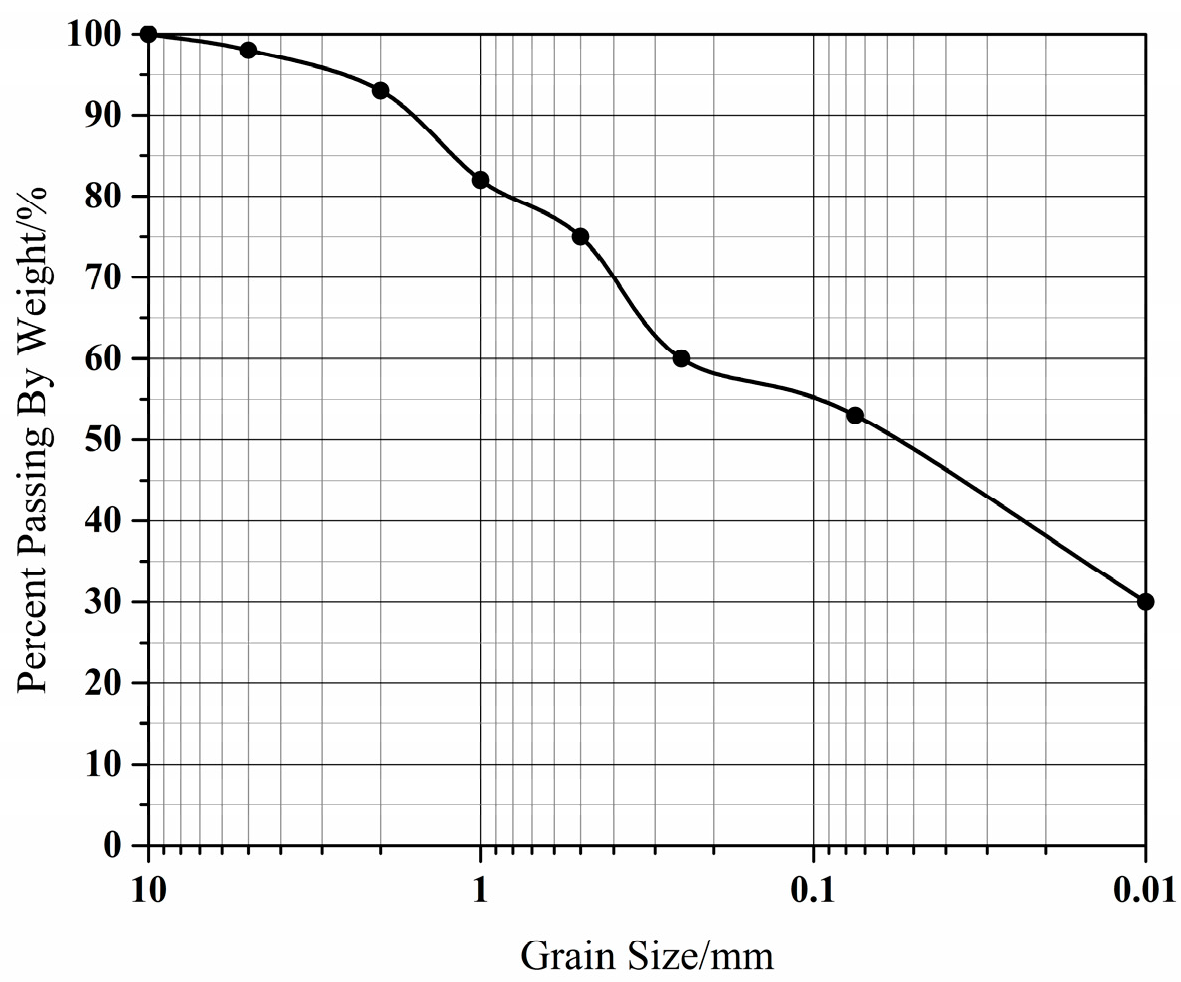
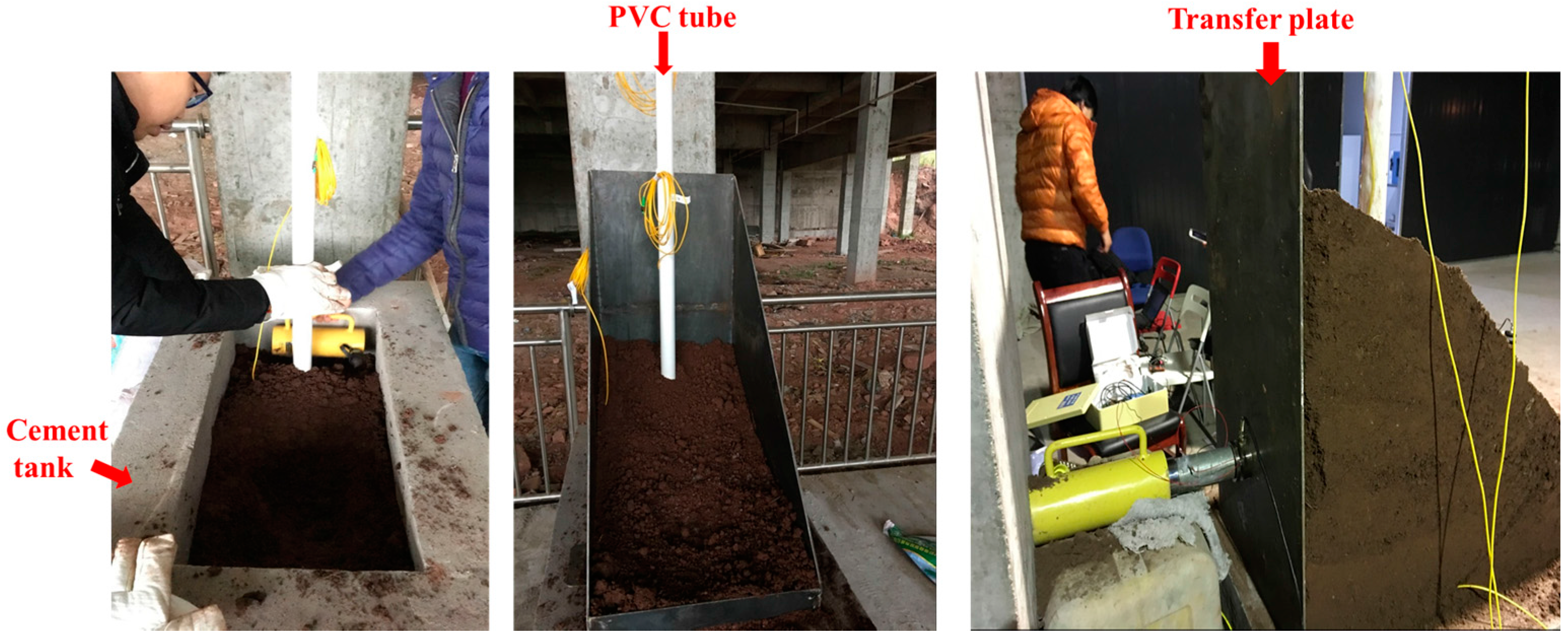
4.3. Slope Model
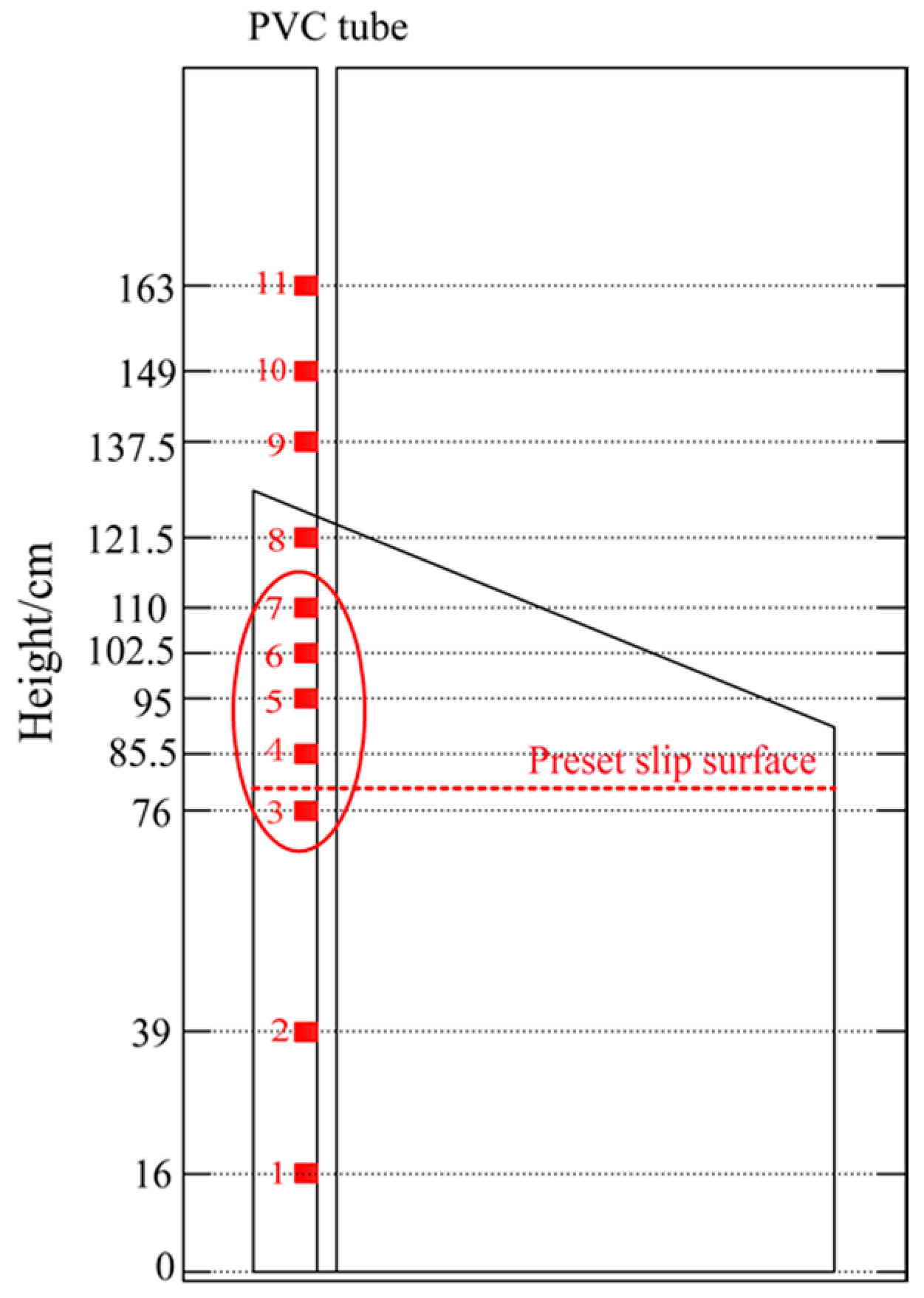
4.4. Arrangement of FBG Sensors
4.5. Experiment Scheme
5. Test Result Analysis
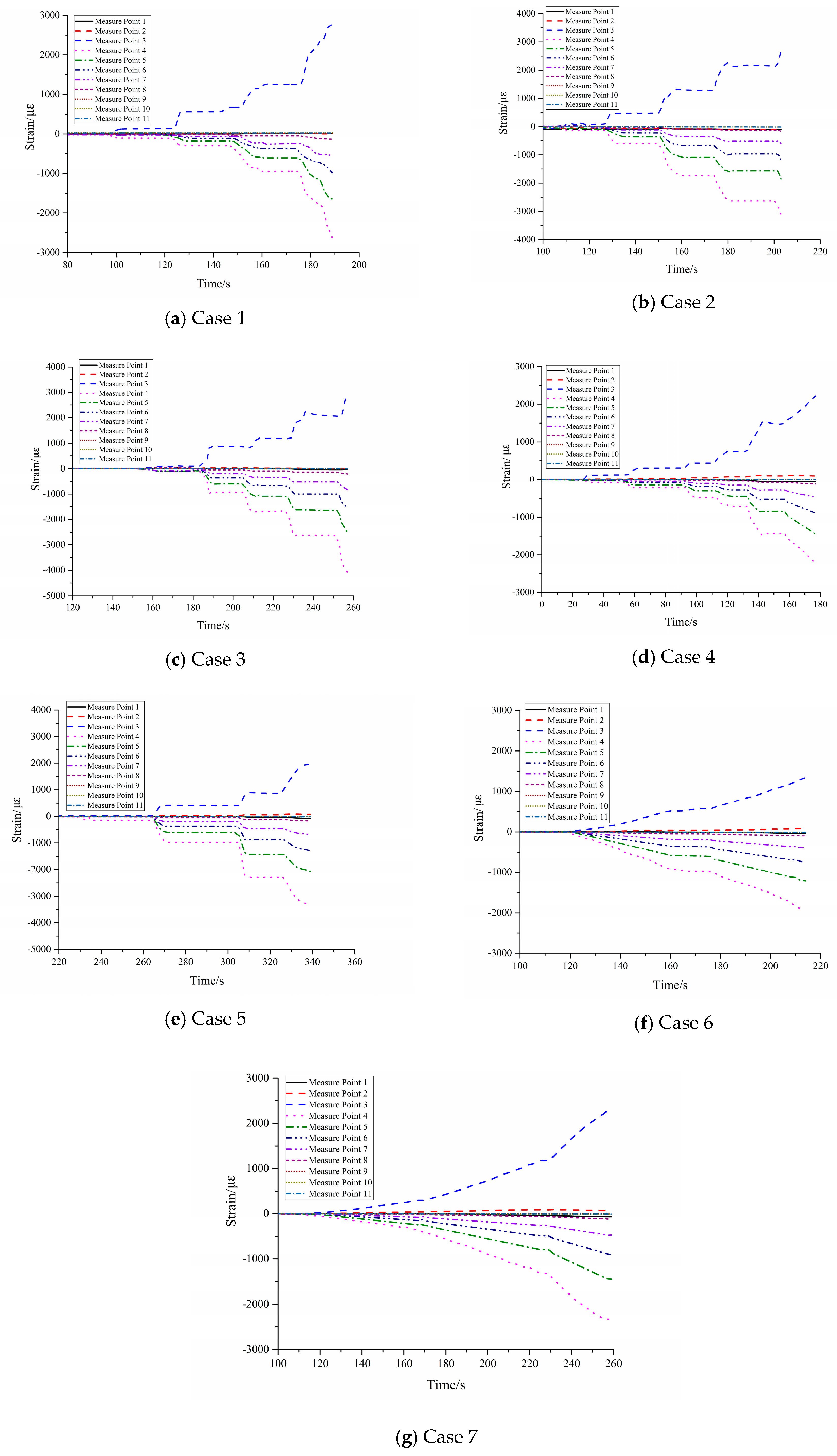
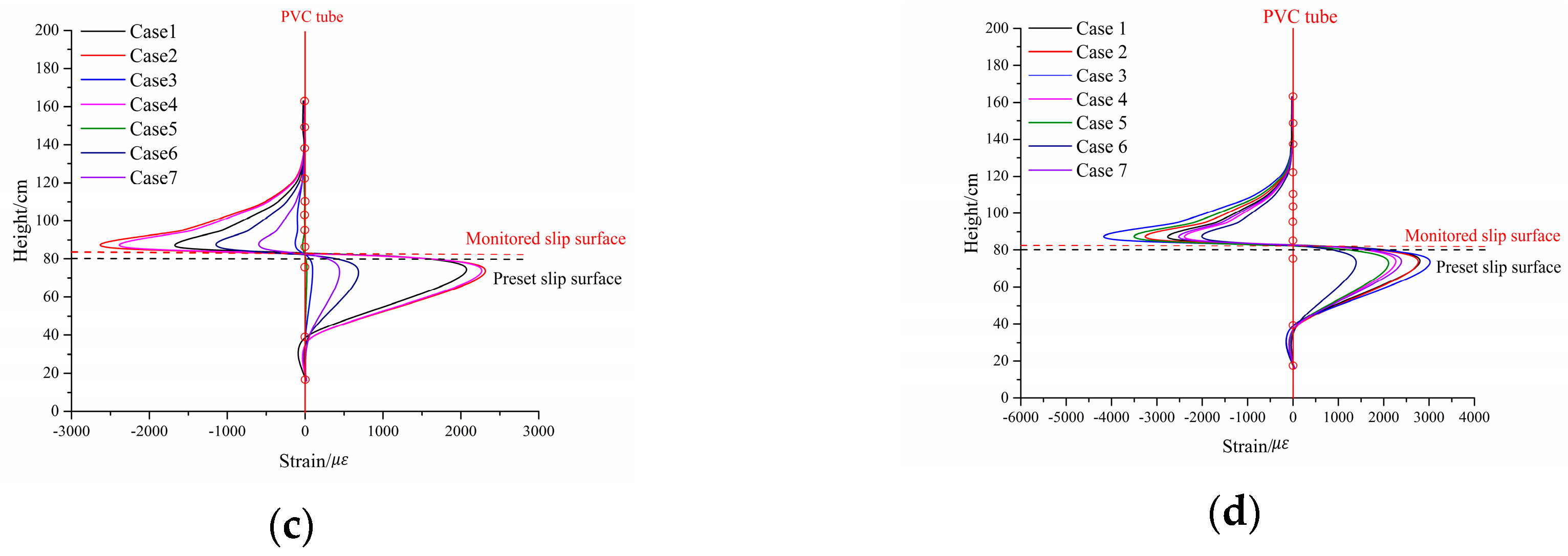
5.1. Strain Monitoring Result of FBG Sensing Array
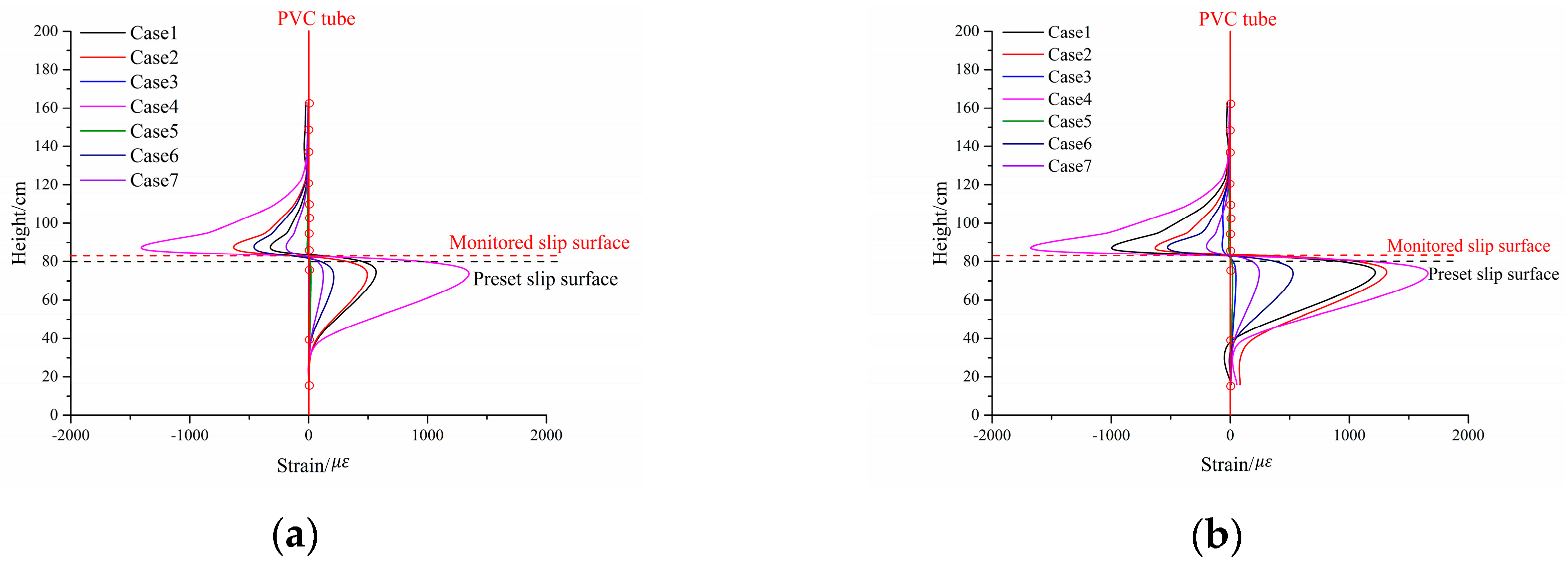
5.2. Slip Surface Monitoring Result Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Dai, F.C.; Deng, J.H.; Tham, L.G.; Law, K.T.; Lee, C.F. A large landslide in zigui county, three gorges area. Can. Geotech. J. 2004, 41, 1233–1240. [Google Scholar] [CrossRef]
- Wang, F.W.; Zhang, Y.M.; Huo, Z.T.; Matsumoto, T.; Huang, B.L. The July 14, 2003 qianjiangping landslide, three gorges reservoir, china. Landslides 2004, 1, 157–162. [Google Scholar] [CrossRef]
- He, K.; Li, X.; Yan, X.; Dong, G. The landslides in the three gorges reservoir region, china and the effects of water storage and rain on their stability. Environ. Geol. 2008, 55, 55–63. [Google Scholar]
- Xu, G.; Li, W.; Yu, Z.; Ma, X.; Yu, Z. The 2 september 2014 shanshucao landslide, three gorges reservoir, china. Landslides 2015, 12, 1169–1178. [Google Scholar] [CrossRef]
- Liu, D.L.; Zhang, S.J.; Yang, H.J.; Jiang, Y.H.; Leng, X.P. Application and analysis of debris-flow early warning system in wenchuan earthquake-affected area. Nat. Hazards Earth Syst. 2016, 16, 483–496. [Google Scholar] [CrossRef]
- Zhang, S.J.; Jiang, C.; Min, X.X.; Ye, F.; Liu, H.W. The distributed crack monitoring using carbon coated opHetical fiber. J. Sichuan Univ. 2010, 42, 230–233. (In Chinese) [Google Scholar]
- Yin, Y.; Wang, H.; Gao, Y.; Li, X. Real-time monitoring and early warning of landslides at relocated wushan town, the three gorges reservoir, china. Landslides 2010, 7, 339–349. [Google Scholar] [CrossRef]
- Simeoni, L.; Mongiovì, L. Inclinometer Monitoring of the Castelrotto Landslide in Italy. J. Geotech. Geoenviron. Eng. 2007, 133, 653–666. [Google Scholar] [CrossRef]
- Maio, C.D.; Vassallo, R.; Vallario, M. Plastic and viscous shear displacements of a deep and very slow landslide in stiff clay formation. Eng. Geol. 2013, 162, 53–66. [Google Scholar] [CrossRef]
- Malarski, R.; Nagórski, K.; Woźniak, M. Application of Inclinometer Measurements for Relative Horizontal Displacement Investigations on Landslide Grounds. Rep. Geod. Goeinform. 2013, 94, 6–13. [Google Scholar] [CrossRef]
- Vassallo, R.; Pagliuca, R.; Maio, C.D. Monitoring of the movements of a deep, slow, clayey landslide and 3D interpretation. Ital. J. Eng. Geol. Environ. 2013, 371–379. [Google Scholar] [CrossRef]
- Zhi, M.; Shang, Y.; Zhao, Y.; Lü, Q.; Sun, H. Investigation and monitoring on a rainfall-induced deep-seated landslide. Arab. J. Geosci. 2016, 9, 182. [Google Scholar] [CrossRef]
- Song, L.; An, Y.L.; Si, G.; Ying, W. Volumetric Algorithm of Short Sliding Distance Landslide. In Proceedings of the IEEE International Conference on Information Technology and Computer Science, Kiev, Ukraine, 25–26 July 2009; Volume 2, pp. 342–345. [Google Scholar]
- Chen, J.; Cheng, F.; Xiong, F.; Ge, Q.; Zhang, S. An experimental study: Fiber Bragg grating-hydrothermal cycling integration system for seepage monitoring of rockfill dams. Struct. Health Monit. 2017, 16, 50–61. [Google Scholar] [CrossRef]
- Glisic, B.; Inaudi, D. Fibre Optic Methods for Structural Health Monitoring; John Wiley & Sons Inc.: New York, NY, USA, 2007. [Google Scholar]
- Barrias, A.; Casas, J.R.; Villalba, S. A review of distributed optical fiber sensors for civil engineering applications. Sensors 2016, 16, 748. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, M.; Cheng, W.; Chen, J.; Xie, R.; Li, X. A High Performance Piezoelectric Sensor for Dynamic Force Monitoring of Landslide. Sensors 2017, 17, 394. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.J.; Jiang, C. An experimental study: Integration device of fiber bragg grating and reinforced concrete beam for measuring debris flow impact force. J. Mt. Sci. 2017, 14, 1–11. [Google Scholar] [CrossRef]
- Yoshida, Y.; Kashiwai, Y.; Murakami, E.; Ishida, S.; Hashiguchi, N. Development of the monitoring system for slope deformations with fiber Bragg grating arrays. Smart Structures Mater. In Proceedings of the 2002 Smart Sensor Technol. Measurement Systems, San Diego, CA, USA, 18–19 March 2002; Volume 4694, pp. 296–303. [Google Scholar]
- Pei, H.F.; Yin, J.H.; Zhu, H.H.; Hong, C.Y.; Jin, W.; Xu, D.S. Monitoring of lateral displacements of a slope using a series of special fibre Bragg grating-based in-place inclinometers. Meas. Sci. Technol. 2012, 23, 1–8. [Google Scholar] [CrossRef]
- Zhu, H.H.; Wang, Z.Y.; Shi, B.; Wong, J.K.W. Feasibility study of strain based stability evaluation of locally loaded slopes: Insights from physical and numerical modeling. Eng. Geol. 2016, 208, 39–50. [Google Scholar] [CrossRef]
- Hanna, T.H. Field Instrumentation in Geotechnical Engineering; Trans Tech Publications: Clausthal-Zellerfeld, Germany, 1985. [Google Scholar]
- Xu, D.; Tong, F.; Pei, H.; Yin, J. In-situ monitoring of internal displacements by FBG sensors and slope stability analysis under rainfall infiltration. Geotech. Eng. 2013, 44, 68–74. [Google Scholar]
- Wang, Y.L.; Shi, B.; Zhang, T.L.; Zhu, H.H.; Jie, Q.; Sun, Q. Introduction to an FBG-based inclinometer and its application to landslide monitoring. J. Civil Struct. Health Monit. 2015, 5, 645–653. [Google Scholar] [CrossRef]
- Manchao, H.E. Real-time remote monitoring and forecasting system for geological disasters of landslides and its engineering application. Chin. J. Rock Mech. Eng. 2009, 28, 1081–1090. (In Chinese) [Google Scholar] [CrossRef]
- Pei, H.F.; Li, C.; Zhu, H.H.; Wang, Y.J. Slope Stability Analysis Based on Measured Strains along Soil Nails Using FBG Sensing Technology. Math. Probl. Eng. 2013, 2013, 1–5. [Google Scholar] [CrossRef]
- Zhu, H.H.; Shi, B.; Yan, J.F.; Zhang, J.; Wang, J. Investigation of the evolutionary process of a reinforced model slope using a fiber-optic monitoring network. Eng. Geol. 2015, 186, 34–43. [Google Scholar] [CrossRef]
- Gu, C.S.; Yang, W.F.; Wu, Z.H.; Cao, L. A slope failure model test under rainfall based on FBG sensor. J. Eng. Geol. 2015, 23, 660–667. (In Chinese) [Google Scholar] [CrossRef]
- Sun, Y.; Xu, H.; Gu, P.; Hu, W. Application of FBG Sensing Technology in Stability Analysis of Geogrid-Reinforced Slope. Sensors 2017, 17, 597. [Google Scholar] [CrossRef] [PubMed]
- Zhu, H.H.; Shi, B.; Zhang, J.; Yan, J.F.; Zhang, C.C. Distributed fiber optic monitoring and stability analysis of a model slope under surcharge loading. J. Mt. Sci. 2014, 11, 979–989. [Google Scholar] [CrossRef]
- Pei, H.; Peng, C.; Yin, J.; Zhu, H.; Chen, X.; Pei, L. Monitoring and warning of landslides and debris flows using an optical fiber sensor technology. J. Mt. Sci. 2011, 8, 728–738. [Google Scholar] [CrossRef]
- Bauchau, O.A.; Craig, J.I. Euler-bernoulli beam theory. Solid Mech. Appl. 2009, 163, 173–221. [Google Scholar]
- Zhu, H.H.; Yin, J.H.; Zhang, L.; Jin, W.; Dong, J.-H. Monitoring internal displacements of a model dam using fbg sensing bars. Adv. Struct. Eng. 2010, 13, 249–261. [Google Scholar] [CrossRef]
- Abramchuk, S.S.; Dimitrienko, I.P.; Kiselev, V.N. Calculation of the elastic characteristics of a unidirectional fiber composite by the cross-section method. Mech. Compos. Mater. 1983, 18, 641–647. [Google Scholar] [CrossRef]
- Gibson, R.F. Principles of composite material mechanics, second edition. J. Neurophysiol. 2007, 114, 1382–1398. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Outer Diameter D/cm | Inner Diameter d/cm | Wall Thickness t/cm | Radius R/cm | Length L/cm | Inertia Moment I/(10 × mm4) |
|---|---|---|---|---|---|
| 6.0 | 3.0 | 1.5 | 3.0 | 200.0 | 59.7 |
| Case | Dry Density | Compaction Degree | Water Content (%) |
|---|---|---|---|
| 1 | 1.68 | 89% | 15 |
| 2 | 1.75 | 93% | 16 |
| 3 | 1.82 | 96% | 19 |
| 4 | 1.58 | 84% | 18 |
| 5 | 1.78 | 94% | 18 |
| 6 | 1.49 | 79% | 22 |
| 7 | 1.63 | 86% | 13 |
| Cases | Maximum Compressive Strain | Maximum Tensile Strain | Loading Time/s | Maximum Loading Force/kN | ||
|---|---|---|---|---|---|---|
| Value/με | Location | Value/με | Location | |||
| 1 | 2644.05 | 4 | 2753.80 | 3 | 188 | 3.05 |
| 2 | 3113.72 | 4 | 2694.19 | 3 | 202 | 3.48 |
| 3 | 3996.87 | 4 | 2931.82 | 3 | 257 | 4.57 |
| 4 | 2285.83 | 4 | 2220.15 | 3 | 178 | 2.61 |
| 5 | 3357.88 | 4 | 2013.24 | 3 | 342 | 3.92 |
| 6 | 1913.45 | 4 | 1342.16 | 3 | 218 | 2.18 |
| 7 | 2412.17 | 4 | 2343.55 | 3 | 260 | 2.83 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Zhang, S.; Chen, J.; Teng, P.; Wei, F.; Chen, Q. A Laboratory Experimental Study: An FBG-PVC Tube Integrated Device for Monitoring the Slip Surface of Landslides. Sensors 2017, 17, 2486. https://doi.org/10.3390/s17112486
Wang K, Zhang S, Chen J, Teng P, Wei F, Chen Q. A Laboratory Experimental Study: An FBG-PVC Tube Integrated Device for Monitoring the Slip Surface of Landslides. Sensors. 2017; 17(11):2486. https://doi.org/10.3390/s17112486
Chicago/Turabian StyleWang, Kai, Shaojie Zhang, Jiang Chen, Pengxiao Teng, Fangqiang Wei, and Qiao Chen. 2017. "A Laboratory Experimental Study: An FBG-PVC Tube Integrated Device for Monitoring the Slip Surface of Landslides" Sensors 17, no. 11: 2486. https://doi.org/10.3390/s17112486
APA StyleWang, K., Zhang, S., Chen, J., Teng, P., Wei, F., & Chen, Q. (2017). A Laboratory Experimental Study: An FBG-PVC Tube Integrated Device for Monitoring the Slip Surface of Landslides. Sensors, 17(11), 2486. https://doi.org/10.3390/s17112486