Design and Calibration of a Novel Bio-Inspired Pixelated Polarized Light Compass

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Design of Pixelated Polarized Light Compass
2.2. Measurement of Skylight Polarization Patterns
2.3. Orientation Method
3. Error Modeling and Calibration Method of the Sensor
3.1. Response Error of CCD Pixels
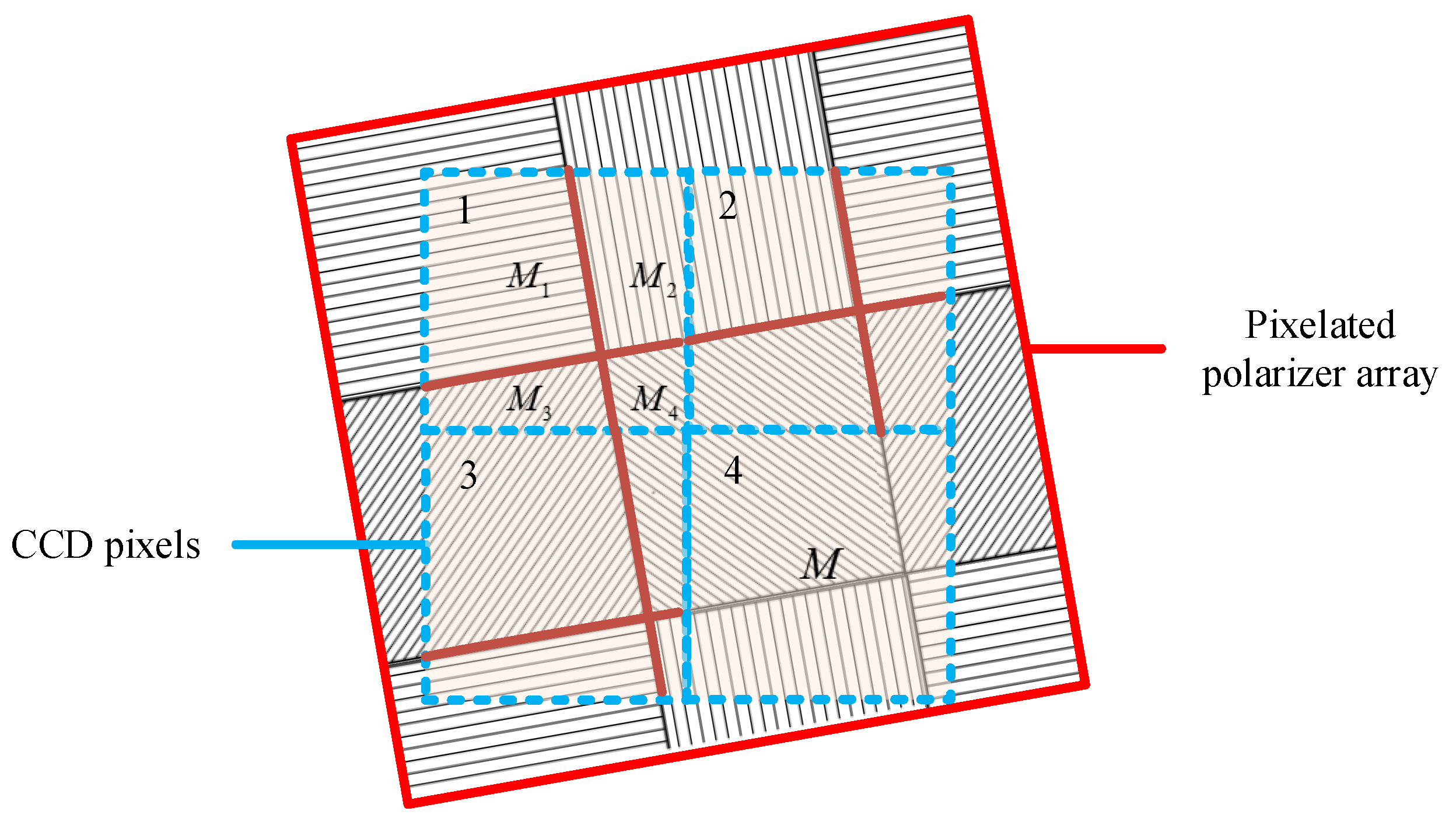
3.2. Installation Error of the Pixelated Polarizer Array
3.3. Calibration Method
4. Results and Discussion
4.1. Calibration Results
4.2. Outdoor Orientation Experiment
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Calculation of the Jacobian Matrix
References
- Wystrach, A.; Graham, P. What can we learn from studies of insect navigation? Anim. Behav. 2012, 84, 13–20. [Google Scholar] [CrossRef]
- Homberg, U.; Heinze, S.; Pfeiffer, K.; Kinoshita, M.; El, J.B. Central neural coding of sky polarization in insects. Philos. Trans. Biol. Sci. 2011, 366, 680–687. [Google Scholar] [CrossRef] [PubMed]
- Reppert, S.M.; Zhu, H.; White, H.R. Polarized Light Helps Monarch Butterflies Navigate. Curr. Biol. 2004, 14, 155–158. [Google Scholar] [CrossRef] [PubMed]
- Muheim, R.; Phillips, J.B.; Akesson, S. Polarized Light Cues Underlie Compass Calibration in Migratory Songbirds. Science 2006, 313, 837–839. [Google Scholar] [CrossRef] [PubMed]
- Dacke, M.; Nilsson, D.E.; Scholtz, C.H.; Byrne, M.; Warrant, E.J. Animal behaviour: Insect orientation to polarized moonlight. Nature 2003, 424, 33. [Google Scholar] [CrossRef] [PubMed]
- Sarkar, M.; Bello, D.S.S.; Hoof, C.V.; Theuwissen, A.J.P. Biologically Inspired CMOS Image Sensor for Fast Motion and Polarization Detection. IEEE Sens. J. 2013, 13, 1065–1073. [Google Scholar] [CrossRef]
- Chahl, J.; Mizutani, A. Biomimetic Attitude and Orientation Sensors. IEEE Sens. J. 2012, 12, 289–297. [Google Scholar] [CrossRef]
- Karman, S.B.; Diah, S.Z.; Gebeshuber, I.C. Bio-Inspired Polarized Skylight-Based Navigation Sensors: A Review. Sensors 2012, 12, 14232–14261. [Google Scholar] [CrossRef] [PubMed]
- Lambrinos, D.; Kobayashi, H.; Pfeifer, R.; Maris, M.; Labhart, T.; Wehner, R. An Autonomous Agent Navigating with a Polarized Light Compass. Adapt. Behav. 1997, 6, 131–161. [Google Scholar] [CrossRef]
- Chu, J.; Zhao, K.; Zhang, Q.; Wang, T. Construction and performance test of a novel polarization sensor for navigation. Sens. Actuators A Phys. 2008, 148, 75–82. [Google Scholar] [CrossRef]
- Zhao, K.C.; Chu, J.K.; Qiang, Z.; Wang, T.C. A Novel Polarization Angle Sensor and Error Compensation Algorithm for Navigation. J. Astronaut. 2009, 30, 503–509. [Google Scholar]
- Ohfuchi, T.; Sakakura, M.; Yamada, Y.; Fukuda, N.; Takiya, T.; Shimotsuma, Y.; Miura, K. Polarization imaging camera with a waveplate array fabricated with a femtosecond laser inside silica glass. Opt. Express 2017, 25, 23738–23754. [Google Scholar] [CrossRef] [PubMed]
- York, T.; Powell, S.B.; Gao, S.; Kahan, L.; Charanya, T.; Saha, D.; Roberts, N.W.; Cronin, T.W.; Marshall, J.; Achilefu, S. Bioinspired Polarization Imaging Sensors: From Circuits and Optics to Signal Processing Algorithms and Biomedical Applications: Analysis at the focal plane emulates nature’s method in sensors to image and diagnose with polarized light. Proc. IEEE 2014, 102, 1450–1469. [Google Scholar] [CrossRef] [PubMed]
- Andreou, A.G.; Kalayjian, Z.K. Polarization imaging: Principles and integrated polarimeters. IEEE Sens. J. 2002, 2, 566–576. [Google Scholar] [CrossRef]
- Pust, N.J.; Shaw, J.A. Dual-field imaging polarimeter using liquid crystal variable retarders. Appl. Opt. 2006, 45, 5470–5478. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Liang, H.; Zhu, H.; Zhang, S. A bionic camera-based polarization navigation sensor. Sensors 2014, 14, 13006–13023. [Google Scholar] [CrossRef] [PubMed]
- Ren, J.B.; Liu, J.; Tang, J.; Wang, C.G.; Wang, F.; Zhang, N. Skylight Polarization Pattern-Based Approach to the Location of the Sun and Solar Meridian. Guangzi Xuebao Acta Photonica Sin. 2015, 44, 107–112. [Google Scholar]
- Zhang, L.; Lu, H.; Hu, X.; Koch, R. Vanishing Point Estimation and Line Classification in a Manhattan World with a Unifying Camera Model. Int. J. Comput. Vis. 2016, 117, 111–130. [Google Scholar] [CrossRef]
- Wolters, D.; Koch, R. Precise and Robust Line Detection for Highly Distorted and Noisy Images. In Proceedings of the German Conference on Pattern Recognition, Hannover, Germany, 12–15 September 2016. [Google Scholar]
- Lu, H.; Zhao, K.; You, Z.; Wang, X. Design and verification of an orientation algorithm based on polarization imaging. Qinghua Daxue Xuebao J. Tsinghua Univ. 2014, 54, 1492–1496. [Google Scholar]
- Tang, J.; Zhang, N.; Li, D.; Wang, F.; Zhang, B.; Wang, C.; Shen, C.; Ren, J.; Xue, C.; Liu, J. Novel robust skylight compass method based on full-sky polarization imaging under harsh conditions. Opt. Express 2016, 24, 15834–15844. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Hu, X.; Lian, J.; Zhang, L.; He, X. Bionic Orientation and Visual Enhancement with a Novel Polarization Camera. IEEE Sens. J. 2017, 17, 1316–1324. [Google Scholar] [CrossRef]
- Momeni, M.; Titus, A.H. An analog VLSI chip emulating polarization vision of octopus retina. IEEE Trans. Neural Netw. 2006, 17, 222–232. [Google Scholar] [CrossRef] [PubMed]
- Myhre, G.; Hsu, W.L.; Peinado, A.; Lacasse, C.; Brock, N.; Chipman, R.A.; Pau, S. Liquid crystal polymer full-stokes division of focal plane polarimeter. Opt. Express 2012, 20, 27393–27409. [Google Scholar] [CrossRef] [PubMed]
- Kulkarni, M.; Gruev, V. Integrated spectral-polarization imaging sensor with aluminum nanowire polarization filters. Opt. Express 2012, 20, 22997–23012. [Google Scholar] [CrossRef] [PubMed]
- Gruev, V.; Spiegel, J.V.D.; Engheta, N. Dual-tier thin film polymer polarization imaging sensor. Opt. Express 2010, 18, 19292–19303. [Google Scholar] [CrossRef] [PubMed]
- Tokuda, T.; Yamada, H.; Sasagawa, K.; Ohta, J. Polarization-Analyzing CMOS Image Sensor with Monolithically Embedded Polarizer for Microchemistry Systems. IEEE Trans. Biomed. Circuits Syst. 2009, 3, 259–266. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Boussaid, F.; Bermak, A.; Chigrinov, V.G. Thin Photo-Patterned Micropolarizer Array for CMOS Image Sensors. IEEE Photonics Technol. Lett. 2009, 21, 805–807. [Google Scholar] [CrossRef]
- Tu, X.; Jiang, L.; Ibn-Elhaj, M.; Pau, S. Design, fabrication and testing of achromatic elliptical polarizer. Opt. Express 2017, 25, 10355–10367. [Google Scholar] [CrossRef] [PubMed]
- Gruev, V.; Perkins, R.; York, T. CCD polarization imaging sensor with aluminum nanowire optical filters. Opt. Express 2010, 18, 19087–19094. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.J.; Walters, F.; Liu, X.; Sciortino, P.; Deng, X. High-performance, large area, deep ultraviolet to infrared polarizers based on 40 nm line/78 nm space nanowire grids. Appli. Phys. Lett. 2007, 90, 675. [Google Scholar] [CrossRef]
- York, T.; Gruev, V. Characterization of a visible spectrum division-of-focal-plane polarimeter. Appl. Opt. 2012, 51, 5392–5400. [Google Scholar] [CrossRef] [PubMed]
- Gao, S.; Gruev, V. Gradient based interpolation for division of focal plane polarization imaging sensors. In Proceedings of the IEEE International Symposium on Circuits and Systems, Seoul, Korea, 20–23 May 2012; pp. 1855–1858. [Google Scholar]
- Xian, Z.; Hu, X.; Lian, J.; Zhang, L.; Cao, J.; Wang, Y.; Ma, T. A novel angle computation and calibration algorithm of bio-inspired sky-light polarization navigation sensor. Sensors 2014, 14, 17068–17088. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Hu, X.; Zhang, L.; Lian, J.; He, X. Polarized Light Compass Aided Visual-Inertial Navigation under Foliage Environment. IEEE Sens. J. 2017, 17, 5646–5653. [Google Scholar] [CrossRef]
- Bazaraa, M.S.; Sherali, H.D.; Shetty, C.M. Nonlinear Programming: Theory and Algorithms; John Wiley and Sons, Inc.: New York, NY, USA, 2013. [Google Scholar]
- Powell, S.B.; Gruev, V. Calibration methods for division-of-focal-plane polarimeters. Opt. Express 2013, 21, 21040–21056. [Google Scholar] [CrossRef]
- Horvath, G.; Bernath, B.; Suhai, B.; Barta, A.; Wehner, R. First observation of the fourth neutral polarization point in the atmosphere. J. Opt. Soc. Am. A Opt. Image Sci. Vis. 2002, 19, 2085–2099. [Google Scholar] [CrossRef] [PubMed]
- Zhao, K.; Chu, J.; Wang, T.; Zhang, Q. A Novel Angle Algorithm of Polarization Sensor for Navigation. IEEE Trans. Instrum. Meas. 2009, 58, 2791–2796. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Calibration Process | Max Error () | Average Error () | Std Error () |
|---|---|---|---|
| Before Calibration | 5.19 | 1.88 | 1.84 |
| Calibration Step 1 | 1.82 | 0.36 | 0.99 |
| Calibration Step 2 | 0.15 | −0.01 | 0.06 |
| Orientation Method | Max Error () | Average Error () | Std Error () |
|---|---|---|---|
| Single Point | 2.84 | 0.35 | 1.22 |
| Line Detection | 1.46 | −0.08 | 0.57 |
| Our Method | 0.37 | −0.08 | 0.15 |
| Experiment Number | Weather | Solar Elevation Angle () | Std Error () |
|---|---|---|---|
| 1 | sunny | −0.5 | 0.15 |
| 2 | sunny | 5.5 | 0.32 |
| 3 | sunny | 9.1 | 0.43 |
| 4 | sunny | 13.5 | 0.61 |
| 5 | sunny | 18.2 | 0.87 |
| 6 | cloudy | 0.2 | 0.32 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, G.; Hu, X.; Lian, J.; He, X.; Zhang, L.; Wang, Y.; Dong, F. Design and Calibration of a Novel Bio-Inspired Pixelated Polarized Light Compass. Sensors 2017, 17, 2623. https://doi.org/10.3390/s17112623
Han G, Hu X, Lian J, He X, Zhang L, Wang Y, Dong F. Design and Calibration of a Novel Bio-Inspired Pixelated Polarized Light Compass. Sensors. 2017; 17(11):2623. https://doi.org/10.3390/s17112623
Chicago/Turabian StyleHan, Guoliang, Xiaoping Hu, Junxiang Lian, Xiaofeng He, Lilian Zhang, Yujie Wang, and Fengliang Dong. 2017. "Design and Calibration of a Novel Bio-Inspired Pixelated Polarized Light Compass" Sensors 17, no. 11: 2623. https://doi.org/10.3390/s17112623
APA StyleHan, G., Hu, X., Lian, J., He, X., Zhang, L., Wang, Y., & Dong, F. (2017). Design and Calibration of a Novel Bio-Inspired Pixelated Polarized Light Compass. Sensors, 17(11), 2623. https://doi.org/10.3390/s17112623