I-DWRL: Improved Dual Wireless Radio Localization Using Magnetometer

Abstract
:1. Introduction
2. Related Work
- absolute vs. relative
- centralized vs. decentralized
- range free vs. range based
- anchor vs. anchorless.
2.1. Dual Wireless Radio Localization
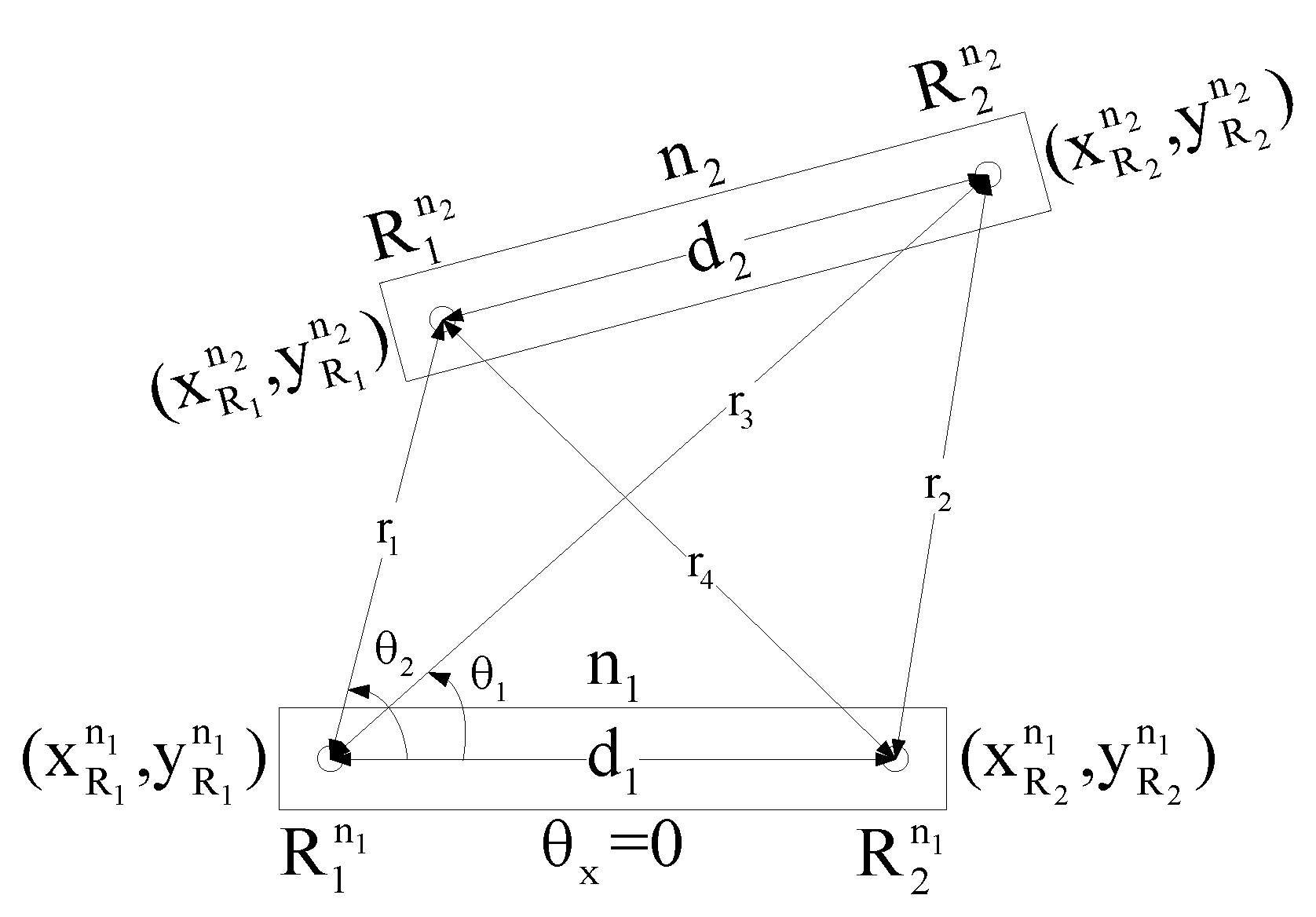
2.1.1. Semi-Localization
2.1.2. Rigid Localization
2.1.3. DWRL Algorithm
2.1.4. DWRL Algorithm Drawbacks
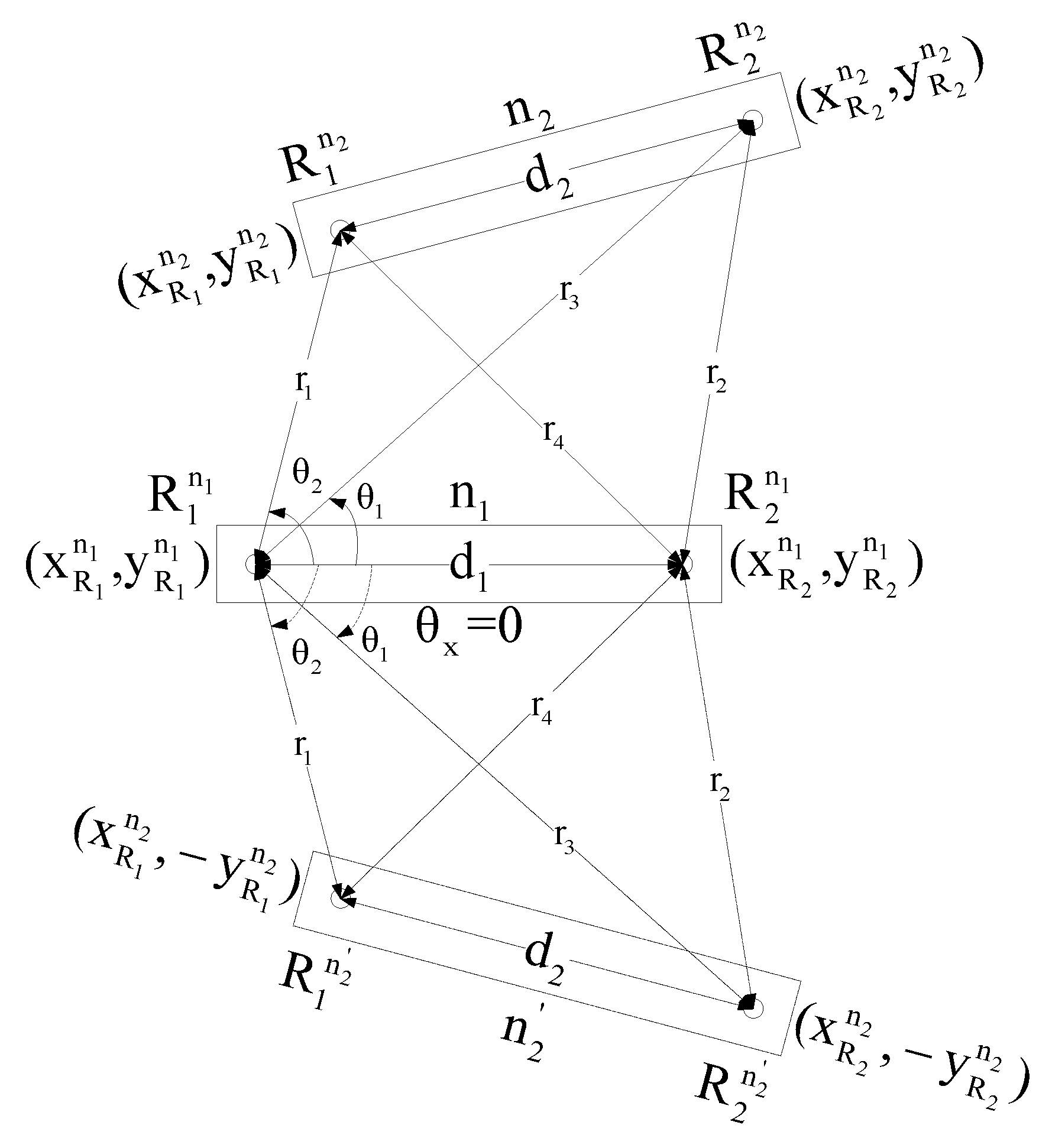
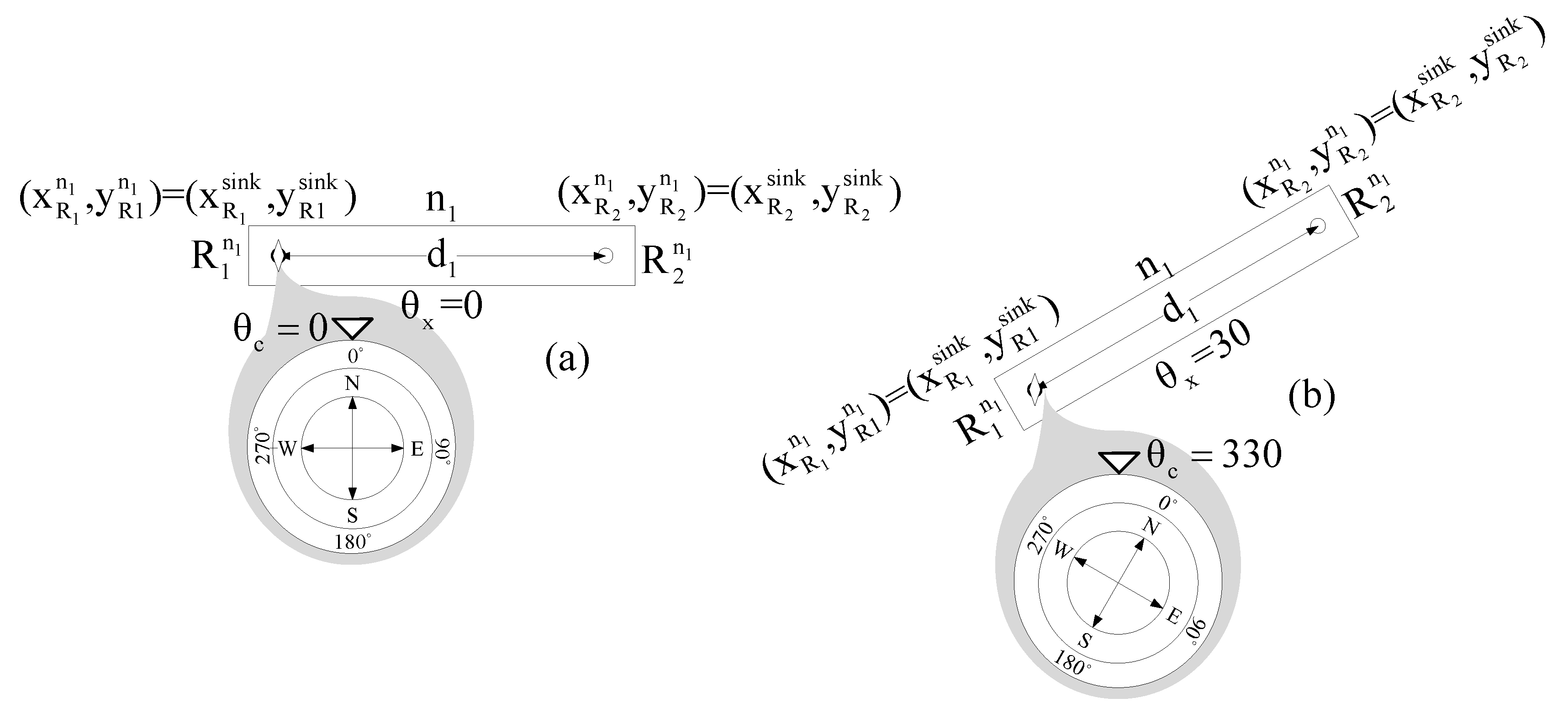
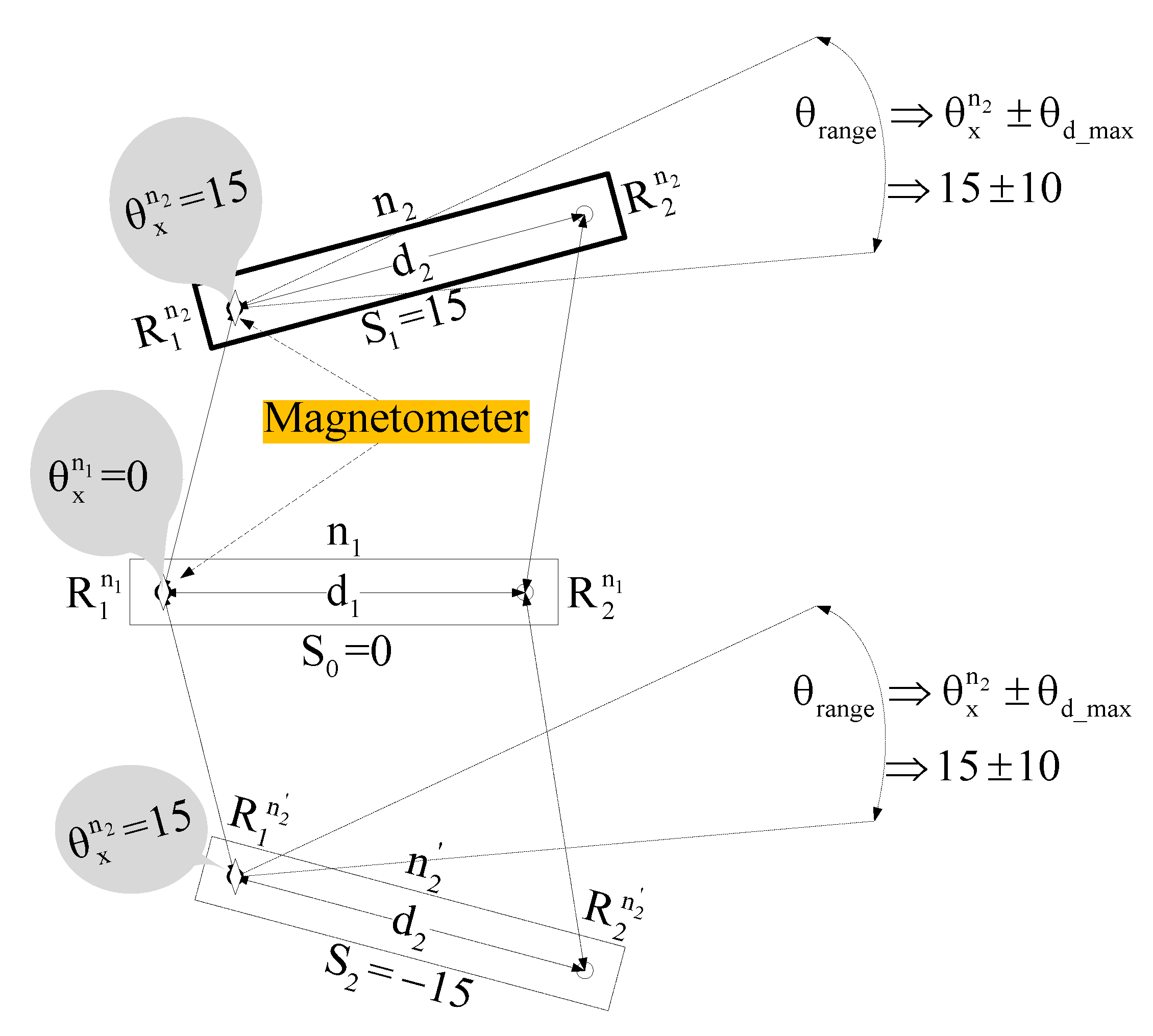
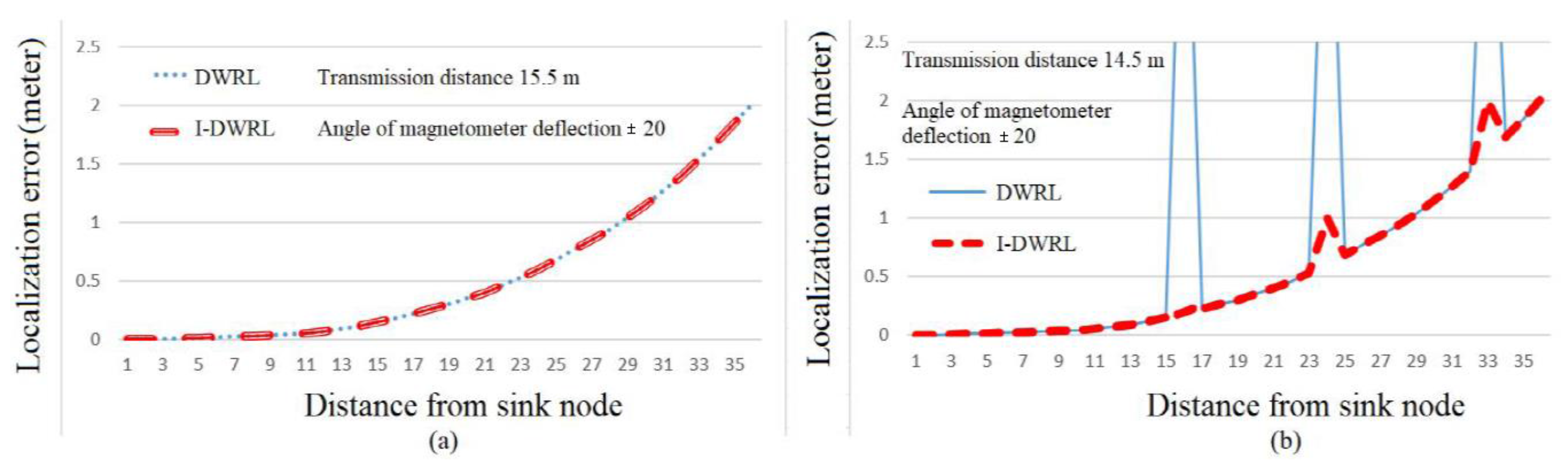
- If the initial location of the sink node is not known, then the DWRL algorithm considers that Radio1 () of the sink node has been assigned a specific location (0,0), and Radio2 () of sink node is considered in the direction of positive x-axis, which points to local east direction. If nodes are randomly deployed, how then can we suppose the Radio2 of the sink node is in the direction of local east? The wrong angle of axis of the sink node can lead to the wrong location of the rest of the network nodes. Therefore, we need to find actual direction of .
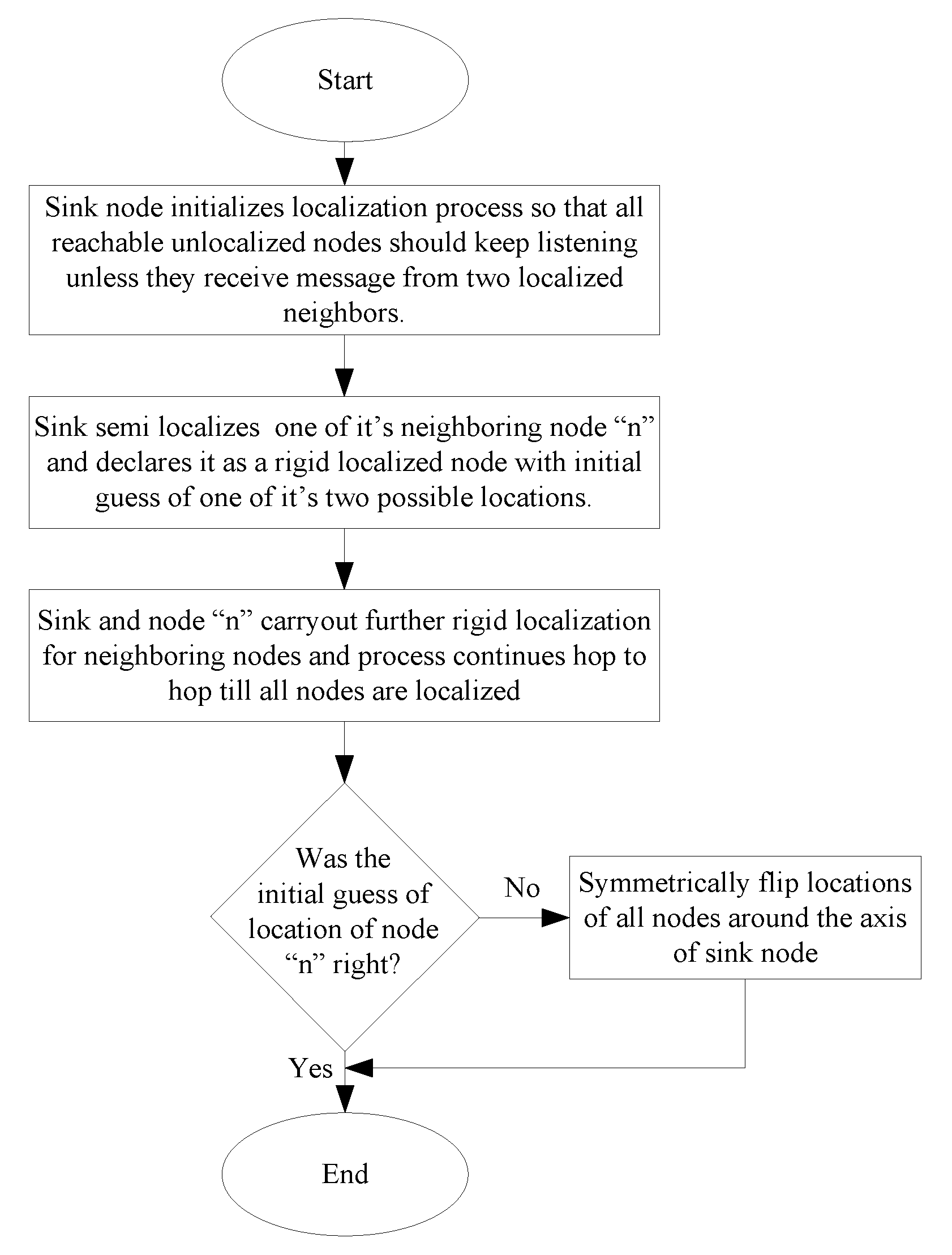
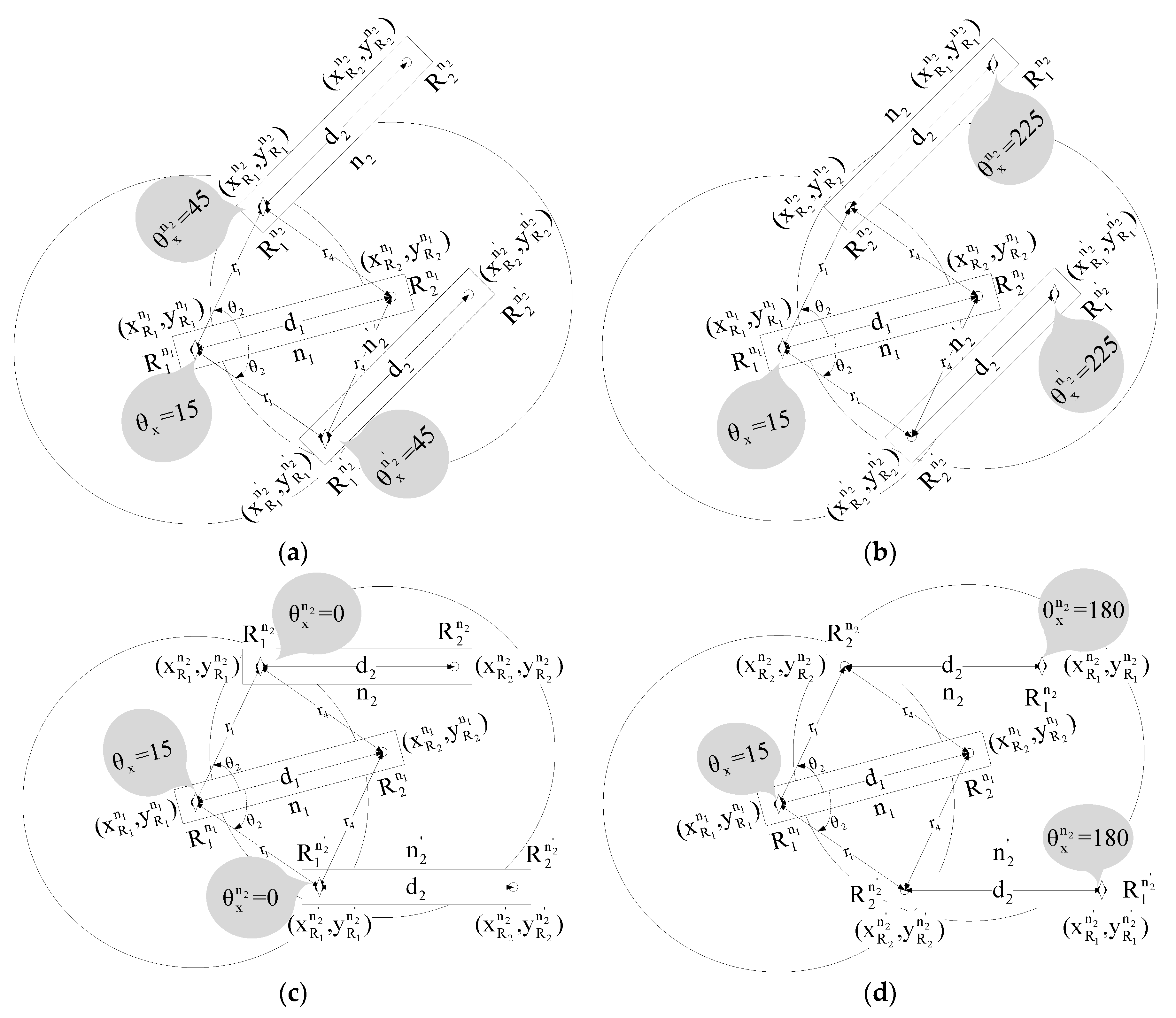
- The DWRL algorithm needs at least two localized nodes to fully localize and unlocalized the node. For this reason, the DWRL algorithm cannot rigid localize first node with one sink node. First, the semi-localized node is declared as rigid localized on the basis of one randomly chosen location solution of the two possible location solutions of the first node. This can lead to serious localization problems if rest of the network continues to localize with the help of the wrong location of first node. What if the applications scenario is critical, and we have to use the location of some nodes before the whole network localization process is completed, and then the third party finds out that location of first node was not right and location of all nodes need to be flipped around the axis of the sink node? Therefore, we need to find the exact location of the first node.
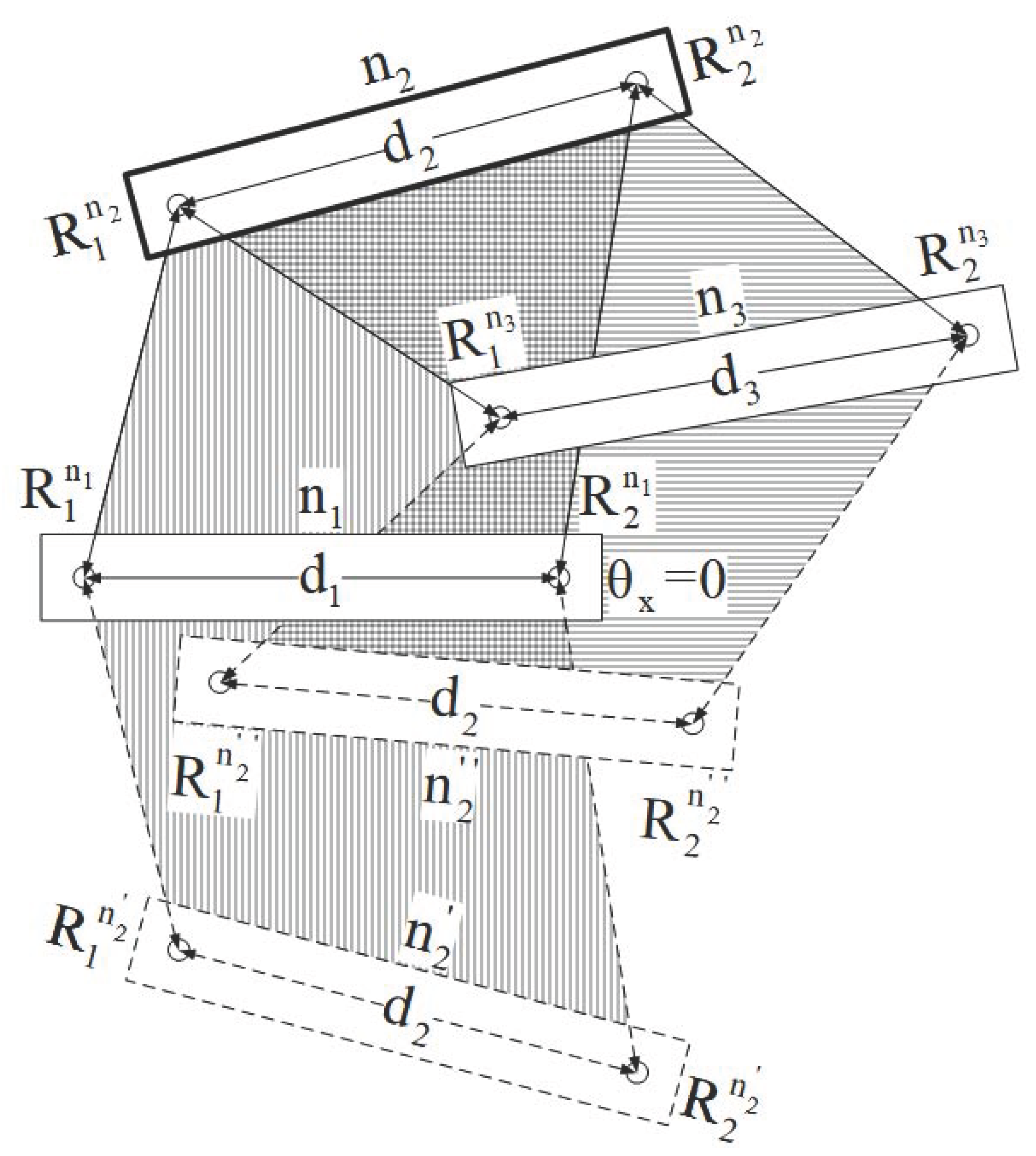
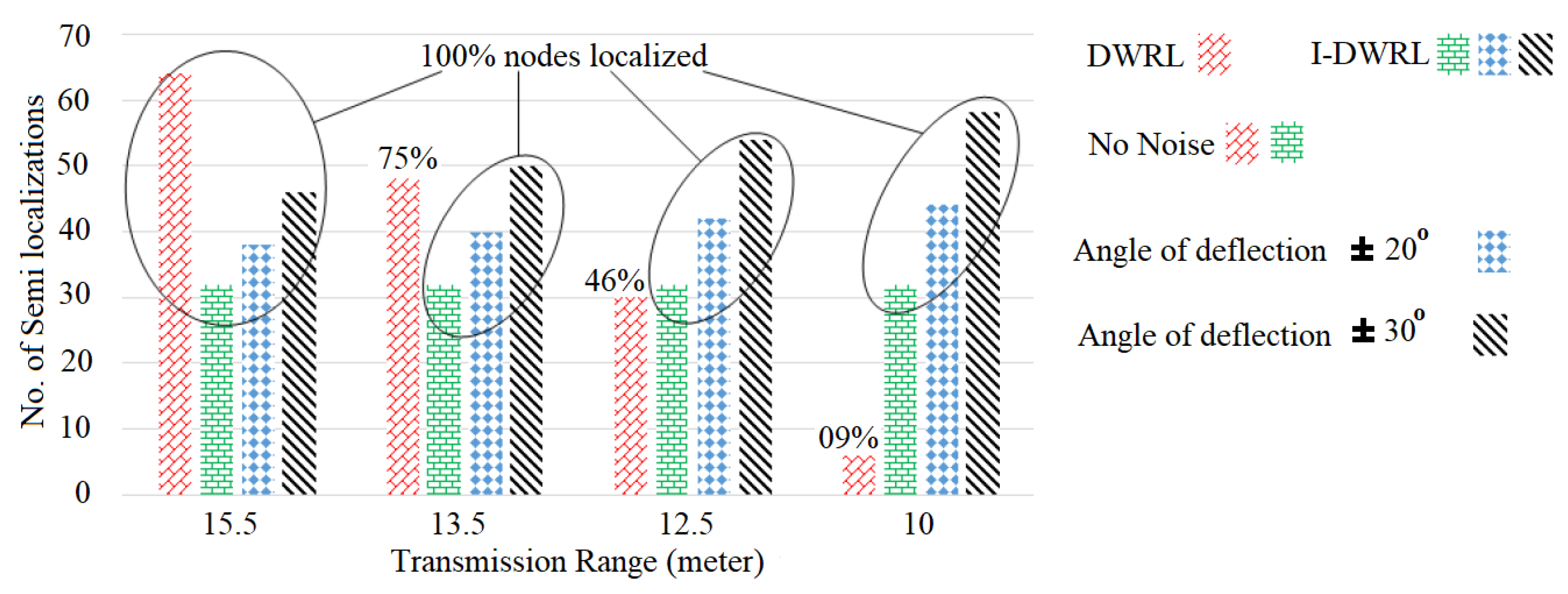
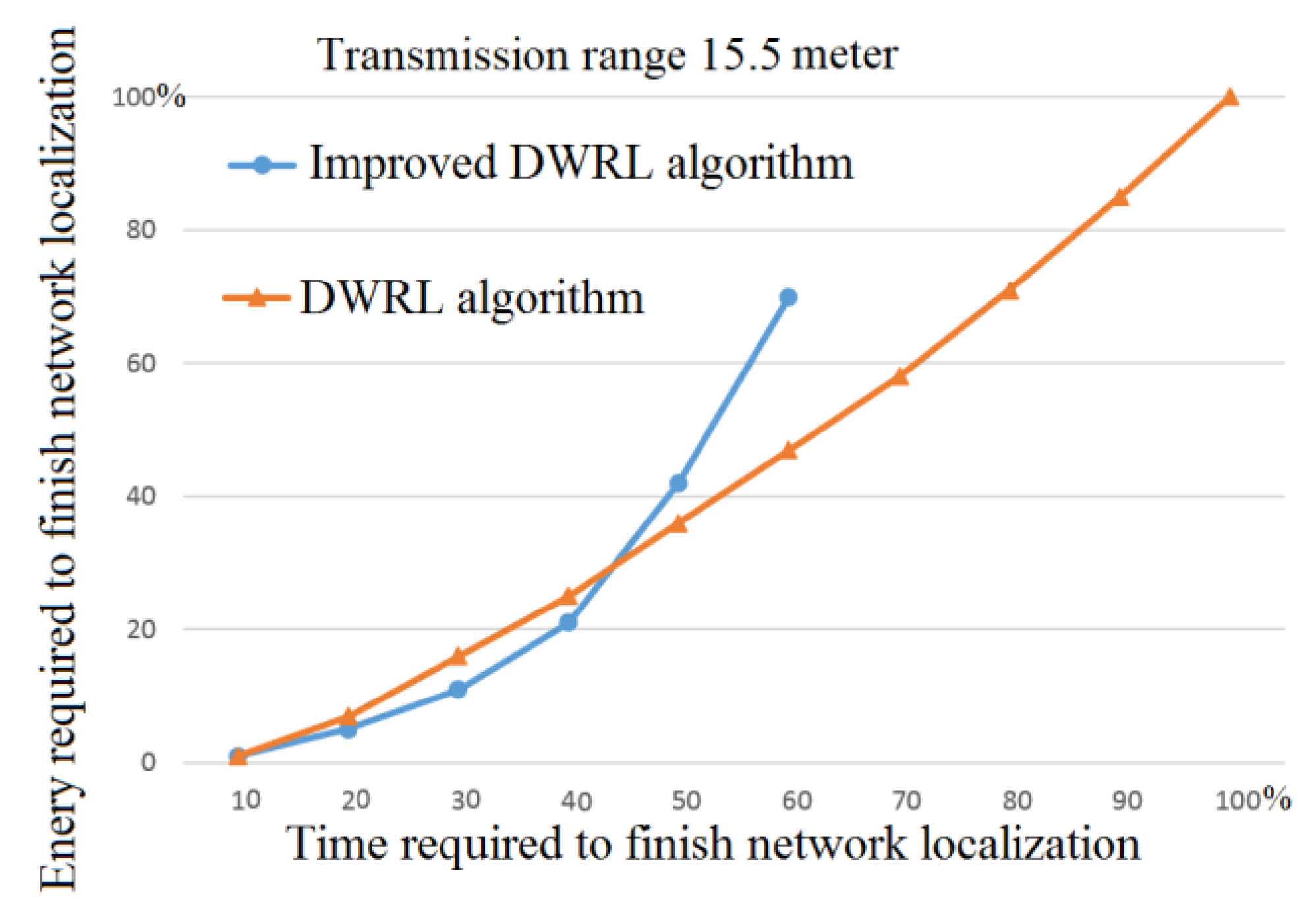
- To rigid localize a node, a minimum of two semi-localizations are required. If an unlocalized node cannot listen from at least two localized nodes then it cannot be localized and it has to wait, unless somehow two localized signals are received. If some node cannot receive two localized signals then it cannot be localized at all. This requires the DWRL algorithm to perform at least semi-localizations [25] to localize the entire network. Here, is the number of semi-localizations required for network with number of nodes, which is equal to twice the number of nodes and three less, where three indicates that there are no semi-localizations performed for a sink node and only one semi-localization is performed for the node that will be localized first. Since semi-localizations can be carried out with each choice of a different edge, the total number of semi-localizations can be, at most, . A higher number of semi-localizations uses more energy and time, therefore we need to minimize the total number of semi-localizations as well as increase number of fully localized nodes even with single semi-localization step.
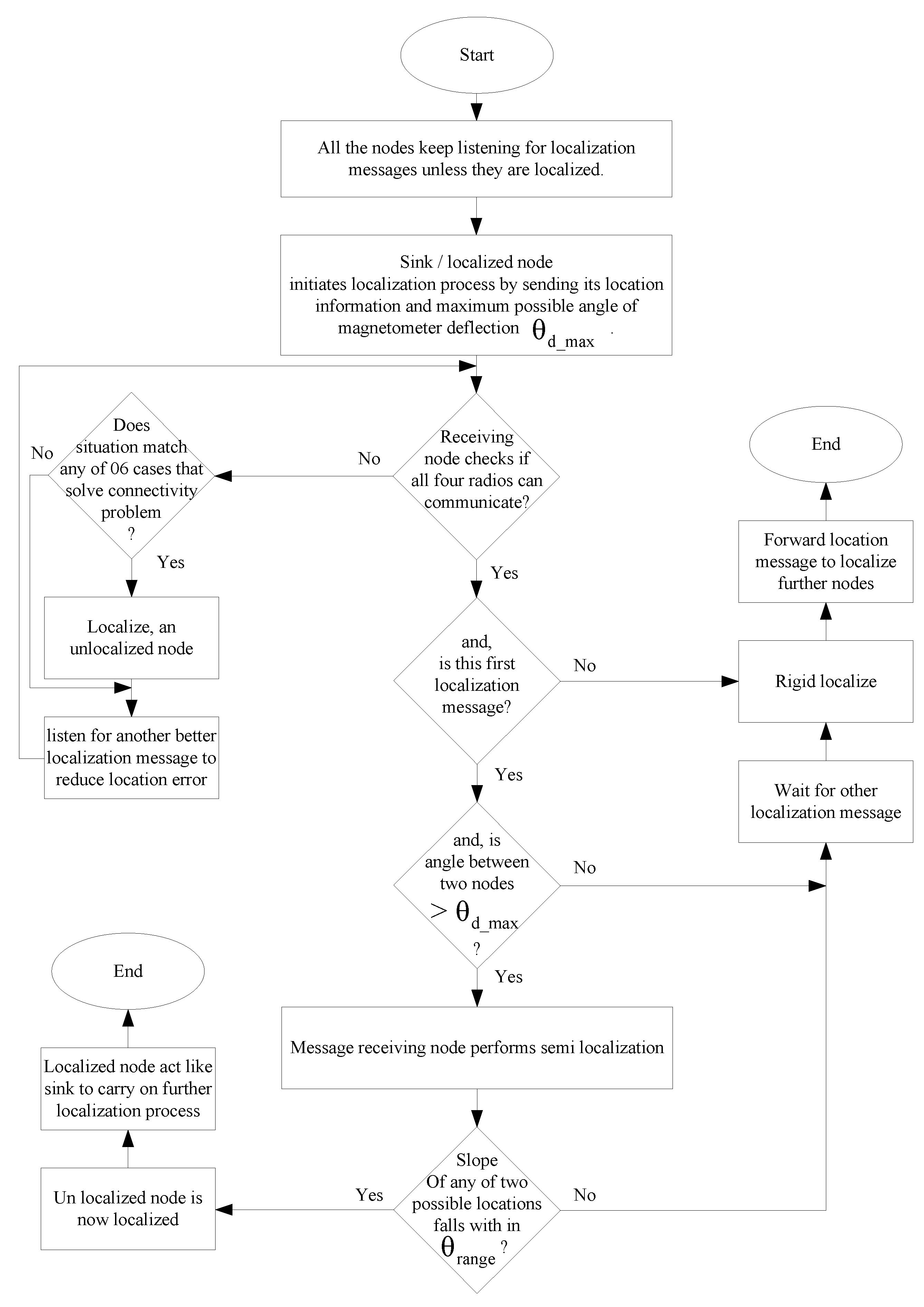
- For successful semi-localization, each of four radios of two nodes must be in communication range with rest of the three radios. This requires either high node density or high transmission power, where high node density costs more nodes and high transmission power reduces the life of sensor nodes. We need to develop a way for nodes to be localized even if few of the four radios of the two communicating nodes can reach each other.
3. Improved DWRL (I-DWRL) Algorithm
4. Simulation Scenario, Parameters and Results
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Alhmiedat, T.A.; Yang, S.H. A Survey: Localization and Tracking Mobile Targets through Wireless Sensors Network. In Proceedings of the 8th Annual Postgraduate Symposium on the Convergence of Telecommunications, Networking and Broadcasting, Liverpool, UK, 28–29 June 2007; pp. 1–6. [Google Scholar]
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. A Survey on Sensor Networks. IEEE Commun. Mag. 2002, 40, 102–114. [Google Scholar] [CrossRef]
- Chandrasekhar, V.; Seah, W.K.; Choo, Y.S.; Ee, H.V. Localization in Underwater Sensor Networks: Survey and Challenges. In Proceedings of the 1st ACM International Workshop on Underwater Networks, Los Angeles, CA, USA, 25 September 2006; pp. 33–40. [Google Scholar]
- Erol-Kantarciz, M.; Mouftah, H.T.; Oktug, S. A survey of architectures and localization techniques for underwater acoustic sensor networks. IEEE Commun. Surv. Tutor. 2011, 13, 487–502. [Google Scholar] [CrossRef]
- Li, Z.; Li, R.; Wei, Y.; Pei, T. Survey of Localization Techniques in Wireless Sensor Networks. Inf. Technol. J. 2010, 9, 1754–1757. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Amudson, I.; Koustoubos, X.D.; Amudson, I.; Koustoubos, X.D. A Survey on Localization for Mobile Wireless Sensor Network. In Mobile Entity Localization and Tracking in GPS-Less Environnments; Springer: Berlin/Heidelberg, Germany, 2009; pp. 235–254. [Google Scholar]
- Afzal, S. A Review of Localization Techniques for Wireless Sensor Networks. J. Basic Appl. Sci. Res. 2012, 2, 7795–7801. [Google Scholar]
- Garg, V.; Jhamb, M. A Review of Wireless Sensor Network on Localization Techniques. Int. J. Eng. Trends Technol. 2013, 4, 1049–1053. [Google Scholar]
- Samanta, S.; Tembhare, P.U.; Pote, C.R. A Survey on 3d Localization in Wireless Sensor Networks. Int. J. Comput. Eng. Res. 2013, 3, 90–94. [Google Scholar]
- Poudyal, L.; Sen, B. A Survey on Localization and Covering Techniques in Wireless Sensor Networks. Int. J. Comput. Appl. 2013, 67, 23–27. [Google Scholar] [CrossRef]
- Patwari, N.; Ash, J.N.; Kyperountas, S.; Hero, A.O.; Moses, R.L.; Correal, N.S. Locating the nodes. IEEE Signal Process. Mag. 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Doherty, L.; Pister, K.S.J.; El Ghaoui, L. Convex Position Estimation in Wireless Sensor Networks. IEEE INFOCOM 2001, 3, 1655–1663. [Google Scholar]
- Shang, Y.; Fromherz, M.P.J.; Ruml, W.; Zhang, Y. Localization from Mere Connectivity. In Proceedings of the International Symposium on Mobile Ad Hoc Networking and Computing (MobiHoc), Annapolis, MD, USA, 1–3 June 2003; pp. 201–212. [Google Scholar]
- Savvides, A.; Park, H.; Srivastava, M. The Bits and Flops of the Nhop Multilateration Primitive for Node Localization Problems. In Proceedings of the 1st ACM international Workshop on Wireless Sensor Networks and Applications (WSNA), Atlanta, GA, USA, 28 September 2002; pp. 112–121. [Google Scholar]
- Zhong, Z.; Luo, D.-Y.; Liu, S.-Q.; Fan, X.-P.; Qu, Z.-H. An Adaptive Localization Approach for Wireless Sensor Networks Based on Gauss-Markov Mobility Model. Acta Autom. Sin. 2010, 36, 1557–1568. [Google Scholar] [CrossRef]
- Gao, G.Q.; Lei, L. An Improved Node Localization Algorithm Based on DV-HOP in WSN. In Proceedings of the IEEE International Conference on Advanced Computer Control (ICACC), Shenyang, China, 27–29 May 2010; pp. 321–324. [Google Scholar]
- Awad, A.; Frunzke, T.; Dressler, F. Adaptive Distance Estimation and Localization in WSN Using RSSI Measures. In Proceedings of the 10th Euromicro Conference on Digital System Design Architectures, Methods and Tools (DSD 2007), Lubeck, Germany, 29–31 August 2007; pp. 471–478. [Google Scholar]
- Zhao, Q.; Yang, L. Two-step TOA estimation method for UWB based wireless sensor networks. J. Inf. Comput. Sci. 2012, 9, 4303–4312. [Google Scholar]
- Rong, P.; Sichitiu, M.L. Angle of Arrival Localization for Wireless Sensor Networks. In Proceedings of the 3rd Annual IEEE Communations Society on Sensor and Ad Hoc Communications and Networks, Reston, VA, USA, 28 Septermber 2006. [Google Scholar]
- Shen, Y.; Win, M.Z. Fundamental limits of wideband localization—Part I: A general framework. IEEE Trans. Inf. Theory 2010, 56, 4956–4980. [Google Scholar] [CrossRef]
- Bartoletti, S.; Dai, W.; Conti, A.; Win, M.Z. A mathematical model for wideband ranging. IEEE J. Sel. Top. Signal Process. 2015, 9, 216–228. [Google Scholar] [CrossRef]
- Dardari, D.; Conti, A.; Ferner, U.J.; Giorgetti, A.; Win, M.Z. Ranging with ultrawide bandwidth signals in multipath environments. Proc. IEEE 2009, 97, 404–426. [Google Scholar] [CrossRef]
- Gezici, S.; Tian, Z.; Giannakis, G.B.; Kobayashi, H.; Molisch, A.F.; Poor, H.V.; Sahinoglu, Z. Localization via ultra-wideband radios: A look at positioning aspects for future sensor networks. IEEE Signal Process. Mag. 2005, 22, 70–84. [Google Scholar] [CrossRef]
- Akcan, H.; Evrendilek, C. GPS-free directional localization via dual wireless radios. Int. J. Comput. Commun. 2012, 35, 1151–1163. [Google Scholar] [CrossRef]
- NS-2 Simulator Website. Available online: www.isi.edu/nsnam/ns/ (accessed on 1 March 2017).
- Park, J.; Demaine, E.D.; Teller, S.J. Moving-Baseline Localization. In Proceedings of the 7th International Conference on Information Processing in Sensor Networks (IPSN’08), St. Louis, MO, USA, 22–24 April 2008; pp. 15–26. [Google Scholar]
- Alavi, B.; Pahlavan, K. Modeling of the TOA-based distance measurement error using UWB indoor radio measurements. IEEE Commun. Lett. 2006, 10, 275–277. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulations Parameter | Value |
|---|---|
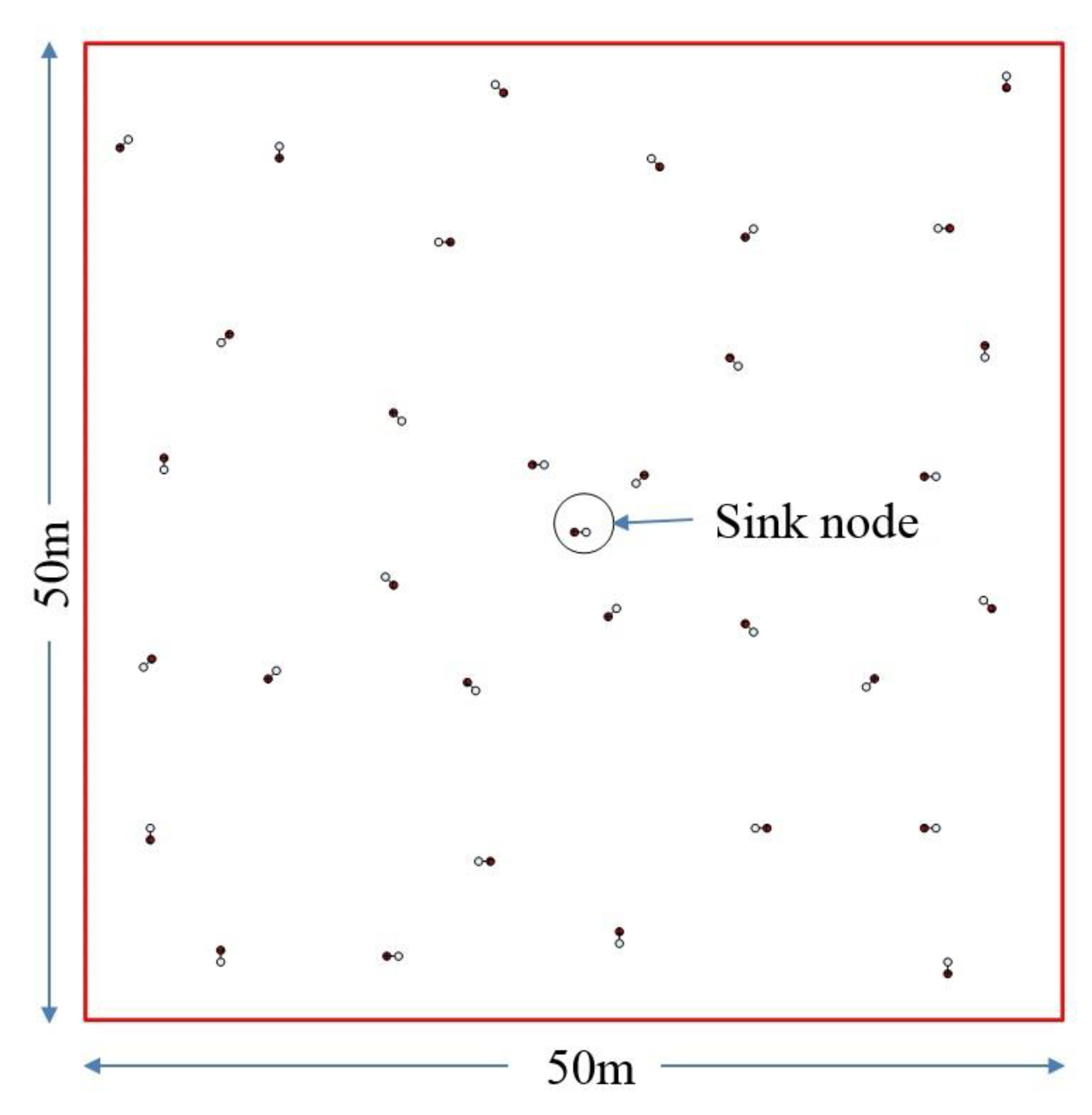
| Area | 50 × 50 m2 |
| Unlocalized nodes | 32 |
| Localized nodes/sink | 1 |
| Node distribution | Uniform random distribution |
| Angle of axis of nodes | random |
| Different transmission ranges | 8, 10, 12.5, 13.5, 14.5, 15.5 m |
| Inter-radio distance | 60 cm |
| Radio | UWB |
| UWB Range error without environmental noise | 1% of transmission range |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aziz, A.; Kumar, R.; Joe, I. I-DWRL: Improved Dual Wireless Radio Localization Using Magnetometer. Sensors 2017, 17, 2630. https://doi.org/10.3390/s17112630
Aziz A, Kumar R, Joe I. I-DWRL: Improved Dual Wireless Radio Localization Using Magnetometer. Sensors. 2017; 17(11):2630. https://doi.org/10.3390/s17112630
Chicago/Turabian StyleAziz, Abdul, Ramesh Kumar, and Inwhee Joe. 2017. "I-DWRL: Improved Dual Wireless Radio Localization Using Magnetometer" Sensors 17, no. 11: 2630. https://doi.org/10.3390/s17112630
APA StyleAziz, A., Kumar, R., & Joe, I. (2017). I-DWRL: Improved Dual Wireless Radio Localization Using Magnetometer. Sensors, 17(11), 2630. https://doi.org/10.3390/s17112630