WearETE: A Scalable Wearable E-Textile Triboelectric Energy Harvesting System for Human Motion Scavenging


Abstract
:1. Introduction
2. Materials and Methods
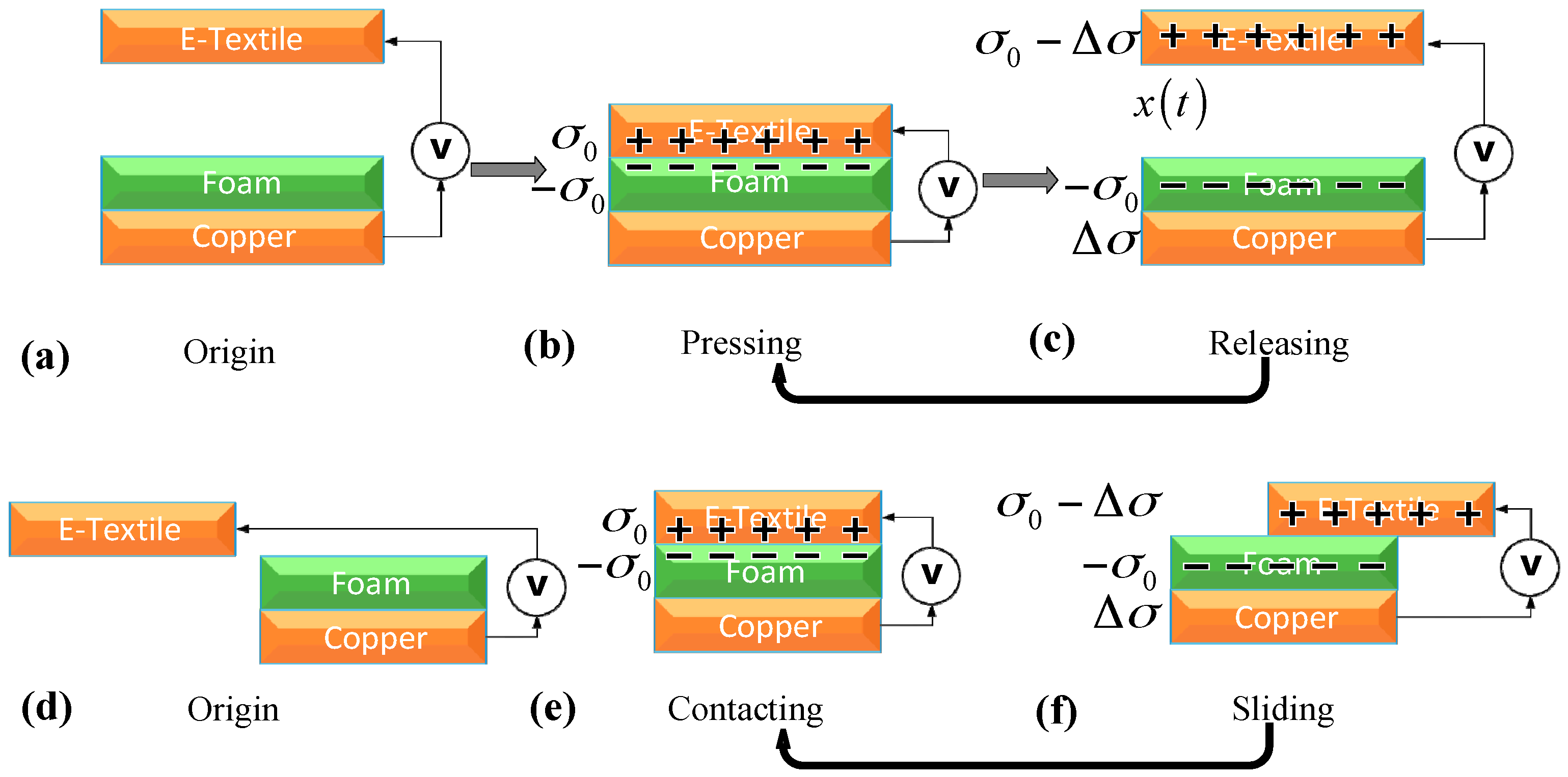
2.1. Mechanism of Triboelectric Energy Conversion
2.2. Material Property and Selection
2.3. Design and Fabrication of Energy Harvester
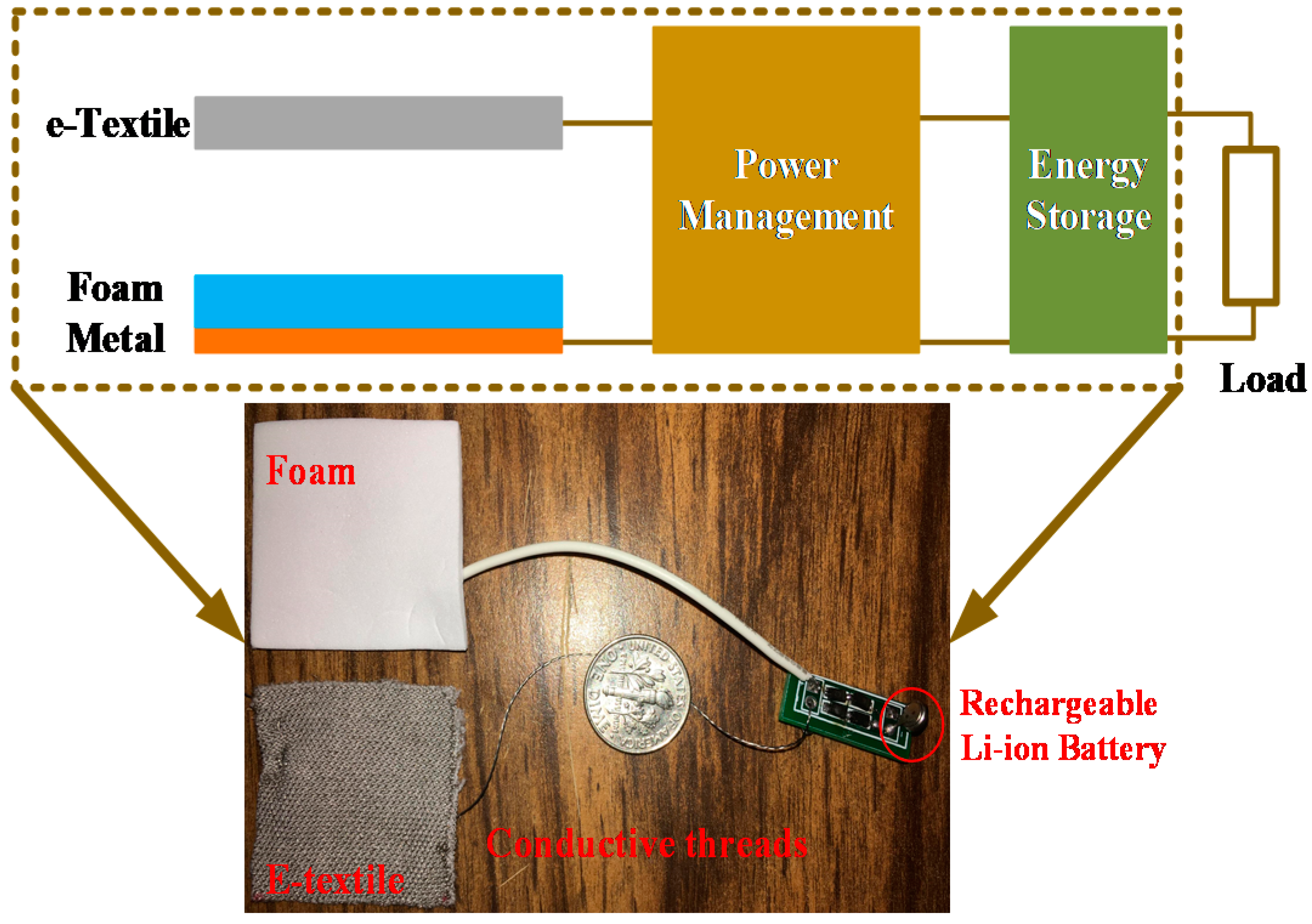
2.4. WearETE System
2.5. Power Efficiency Estimation
3. Experiment and Results
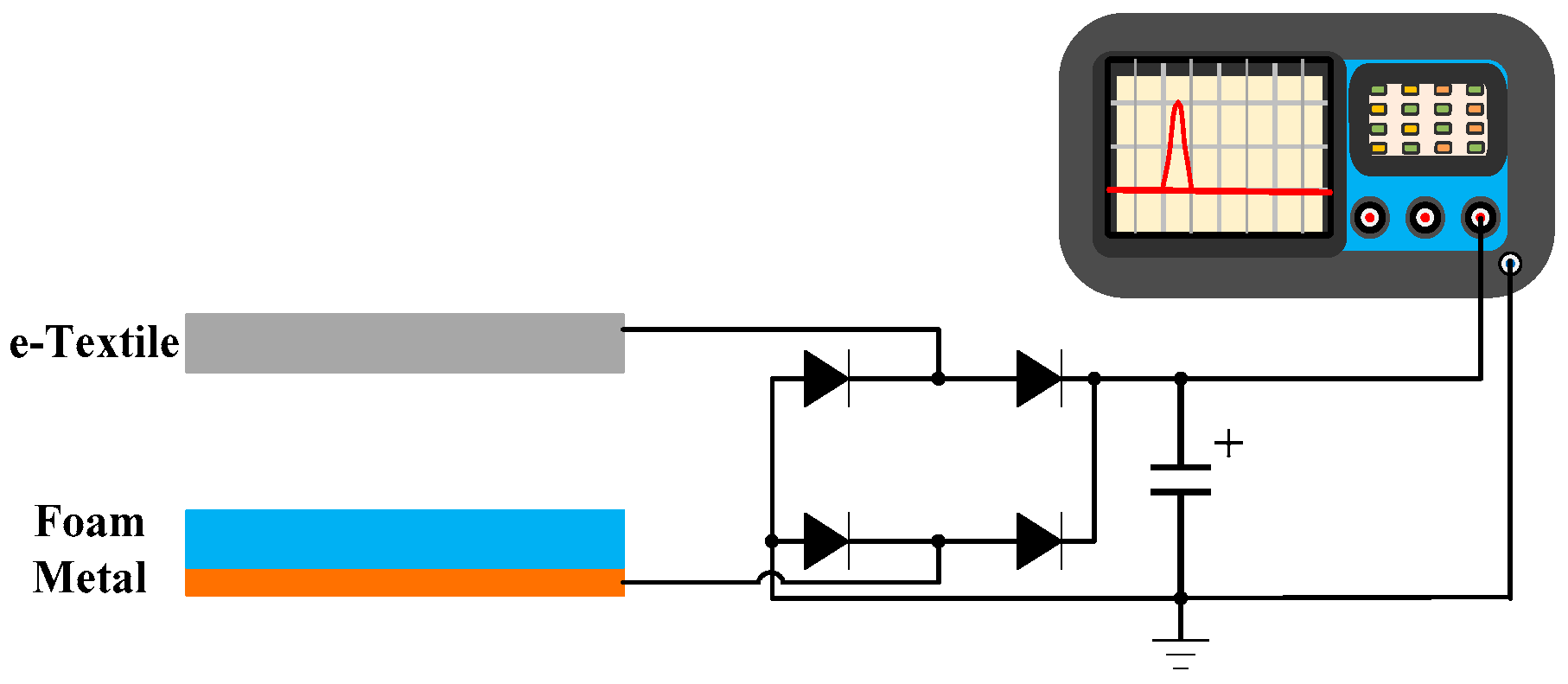
3.1. Energy Harvester Validation
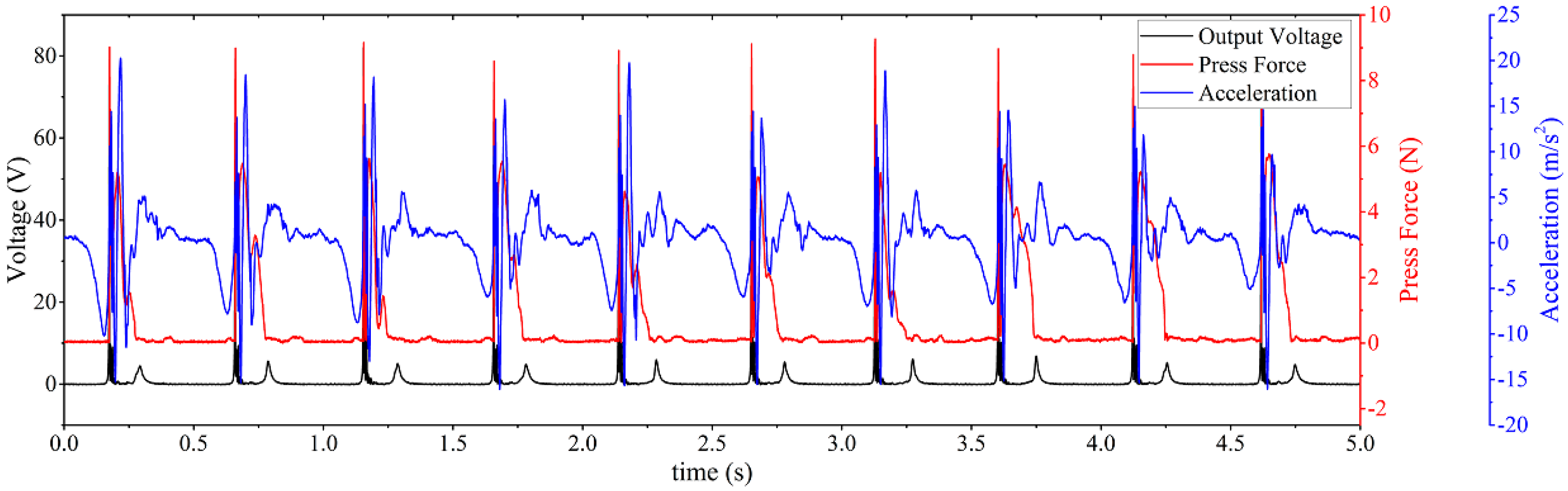
3.2. System Performance
3.3. Harvesting Energy from Walking
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Green, P.L.; Papatheou, E.; Sims, N.D. Energy harvesting from human motion and bridge vibrations: An evaluation of current nonlinear energy harvesting solutions. J. Intell. Mater. Syst. Struct. 2013, 24, 1494–1505. [Google Scholar] [CrossRef]
- Delnavaz, A.; Voix, J. Energy harvesting for in-ear devices using ear canal dynamic motion. IEEE Trans. Ind. Electron. 2014, 61, 583–590. [Google Scholar] [CrossRef]
- Liang, J.; Liao, W.-H. Improved design and analysis of self-powered synchronized switch interface circuit for piezoelectric energy harvesting systems. IEEE Trans. Ind. Electron. 2012, 59, 1950–1960. [Google Scholar] [CrossRef]
- Renaud, M.; Fiorini, P.; van Schaijk, R.; Van Hoof, C. Harvesting energy from the motion of human limbs: The design and analysis of an impact-based piezoelectric generator. Smart Mater. Struct. 2009, 18, 035001. [Google Scholar] [CrossRef]
- Caliò, R.; Rongala, U.B.; Camboni, D.; Milazzo, M.; Stefanini, C.; De Petris, G.; Oddo, C.M. Piezoelectric energy harvesting solutions. Sensors 2014, 14, 4755–4790. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wei, S.; Hu, H.; He, S. Modeling and experimental investigation of an impact-driven piezoelectric energy harvester from human motion. Smart Mater. Struct. 2013, 22, 105020. [Google Scholar] [CrossRef]
- Khaligh, A.; Zeng, P.; Zheng, C. Kinetic energy harvesting using piezoelectric and electromagnetic technologies—State of the art. IEEE Trans. Ind. Electron. 2010, 57, 850–860. [Google Scholar] [CrossRef]
- Dai, D.; Liu, J. Hip-mounted electromagnetic generator to harvest energy from human motion. Front. Energy 2014, 8, 173–181. [Google Scholar] [CrossRef]
- Halim, M.A.; Cho, H.; Salauddin, M.; Park, J.Y. A miniaturized electromagnetic vibration energy harvester using flux-guided magnet stacks for human-body-induced motion. Sens. Actuators A Phys. 2016, 249, 23–31. [Google Scholar] [CrossRef]
- Carden, E.P.; Fanning, P. Vibration based condition monitoring: A review. Struct. Health Monit. 2004, 3, 355–377. [Google Scholar] [CrossRef]
- Pillatsch, P.; Yeatman, E.; Holmes, A. Real world testing of a piezoelectric rotational energy harvester for human motion. J. Phys. Conf. Ser. 2013, 476, 012010. [Google Scholar] [CrossRef]
- Fan, F.-R.; Tian, Z.-Q.; Wang, Z.L. Flexible triboelectric generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Li, X.; Huang, H.; Sun, Y. Tribowalk: Triboelectric dual functional wireless system for gait monitoring and energy harvesting. In Proceedings of the 2016 IEEE 38th Annual International Conference of the Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 4796–4799. [Google Scholar]
- Niu, S.; Wang, X.; Yi, F.; Zhou, Y.S.; Wang, Z.L. A universal self-charging system driven by random biomechanical energy for sustainable operation of mobile electronics. Nat. Commun. 2015, 6. [Google Scholar] [CrossRef] [PubMed]
- Pu, X.; Li, L.; Song, H.; Du, C.; Zhao, Z.; Jiang, C.; Cao, G.; Hu, W.; Wang, Z.L. A self-charging power unit by integration of a textile triboelectric nanogenerator and a flexible lithium-ion battery for wearable electronics. Adv. Mater. 2015, 27, 2472–2478. [Google Scholar] [CrossRef] [PubMed]
- Bai, P.; Zhu, G.; Lin, Z.-H.; Jing, Q.; Chen, J.; Zhang, G.; Ma, J.; Wang, Z.L. Integrated multilayered triboelectric nanogenerator for harvesting biomechanical energy from human motions. ACS Nano 2013, 7, 3713–3719. [Google Scholar] [CrossRef] [PubMed]
- Yang, W.; Chen, J.; Zhu, G.; Yang, J.; Bai, P.; Su, Y.; Jing, Q.; Cao, X.; Wang, Z.L. Harvesting energy from the natural vibration of human walking. ACS Nano 2013, 7, 11317–11324. [Google Scholar] [CrossRef] [PubMed]
- Williams, M.W. Triboelectric charging of insulating polymers—Some new perspectives. AIP Adv. 2012, 2, 010701. [Google Scholar] [CrossRef]
- Matsusaka, S.; Maruyama, H.; Matsuyama, T.; Ghadiri, M. Triboelectric charging of powders: A review. Chem. Eng. Sci. 2010, 65, 5781–5807. [Google Scholar] [CrossRef] [Green Version]
- Davies, D. Charge generation on dielectric surfaces. J. Phys. D Appl. Phys. 1969, 2, 1533–1537. [Google Scholar] [CrossRef]
- Seol, M.L.; Woo, J.H.; Lee, D.I.; Im, H.; Hur, J.; Choi, Y.K. Nature-replicated nano-in-micro structures for triboelectric energy harvesting. Small 2014, 10, 3887–3894. [Google Scholar] [CrossRef] [PubMed]
- Gungor, V.C.; Hancke, G.P. Industrial wireless sensor networks: Challenges, design principles and technical approaches. IEEE Trans. Ind. Electron. 2009, 56, 4258–4265. [Google Scholar] [CrossRef]
- Vullers, R.; van Schaijk, R.; Doms, I.; Van Hoof, C.; Mertens, R. Micropower energy harvesting. Solid-State Electron. 2009, 53, 684–693. [Google Scholar] [CrossRef]
- Park, C.H.; Park, J.K.; Jeon, H.S.; Chun, B.C. Triboelectric series and charging properties of plastics using the designed vertical-reciprocation charger. J. Electrost. 2008, 66, 578–583. [Google Scholar] [CrossRef]
- Diaz, A.; Felix-Navarro, R. A semi-quantitative tribo-electric series for polymeric materials: The influence of chemical structure and properties. J. Electrost. 2004, 62, 277–290. [Google Scholar] [CrossRef]
- The TriboElectric Series. Available online: http://www.webcitation.org/6u4ZOszd8 (accessed on 8 October 2017).
- Saha, C.R.; O’donnell, T.; Wang, N.; McCloskey, P. Electromagnetic generator for harvesting energy from human motion. Sens. Actuators A Phys. 2008, 147, 248–253. [Google Scholar] [CrossRef]
- Yang, B.; Yun, K.S. Piezoelectric shell structures as wearable energy harvesters for effective power generation at low-frequency movement. Sens. Actuators A Phys. 2012, 188, 427–433. [Google Scholar] [CrossRef]
- Niu, S.; Liu, Y.; Zhou, Y.S.; Wang, S.; Lin, L.; Wang, Z.L. Optimization of triboelectric nanogenerator charging systems for efficient energy harvesting and storage. IEEE Trans. Electron. Devices 2015, 62, 641–647. [Google Scholar]
- Zi, Y.; Lin, L.; Wang, J.; Wang, S.; Chen, J.; Fan, X.; Yang, P.K.; Yi, F.; Wang, Z.L. Triboelectric–Pyroelectric–Piezoelectric Hybrid Cell for High-Efficiency Energy-Harvesting and Self-Powered Sensing. Adv. Mater. 2015, 27, 2340–2347. [Google Scholar] [CrossRef] [PubMed]
- Zhu, G.; Zhou, Y.S.; Bai, P.; Meng, X.S.; Jing, Q.; Chen, J.; Wang, Z.L. A Shape-Adaptive Thin-Film-Based Approach for 50% High-Efficiency Energy Generation through Micro-Grating Sliding Electrification. Adv. Mater. 2014, 26, 3788–3796. [Google Scholar] [CrossRef] [PubMed]
- Zi, Y.; Niu, S.; Wang, J.; Wen, Z.; Tang, W.; Wang, Z.L. Standards and figure-of-merits for quantifying the performance of triboelectric nanogenerators. Nat. Commun. 2015, 6. [Google Scholar] [CrossRef] [PubMed]
- Beeby, S.P.; Tudor, M.J.; White, N.M. Energy harvesting vibration sources for microsystems applications. Meas. Sci. Technol. 2006, 17, R175–R195. [Google Scholar] [CrossRef]
- Mateu, L.; Moll, F. Appropriate charge control of the storage capacitor in a piezoelectric energy harvesting device for discontinuous load operation. Sens. Actuators A Phys. 2006, 132, 302–310. [Google Scholar] [CrossRef]
- Wang, H.; Park, J.D.; Ren, Z.J. Practical energy harvesting for microbial fuel cells: A review. Environ. Sci. Technol. 2015, 49, 3267–3277. [Google Scholar] [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Before Test (V) | After Test | |||
|---|---|---|---|---|---|
| A | B | A | B | A | B |
| Polyester | Copper | 98.9 | 112.2 | 51.5 | 125.0 |
| Paper | Copper | 130.3 | 113.2 | 539.5 | −13.6 |
| Cotton | Copper | 124.9 | 116.3 | 355.3 | 169.0 |
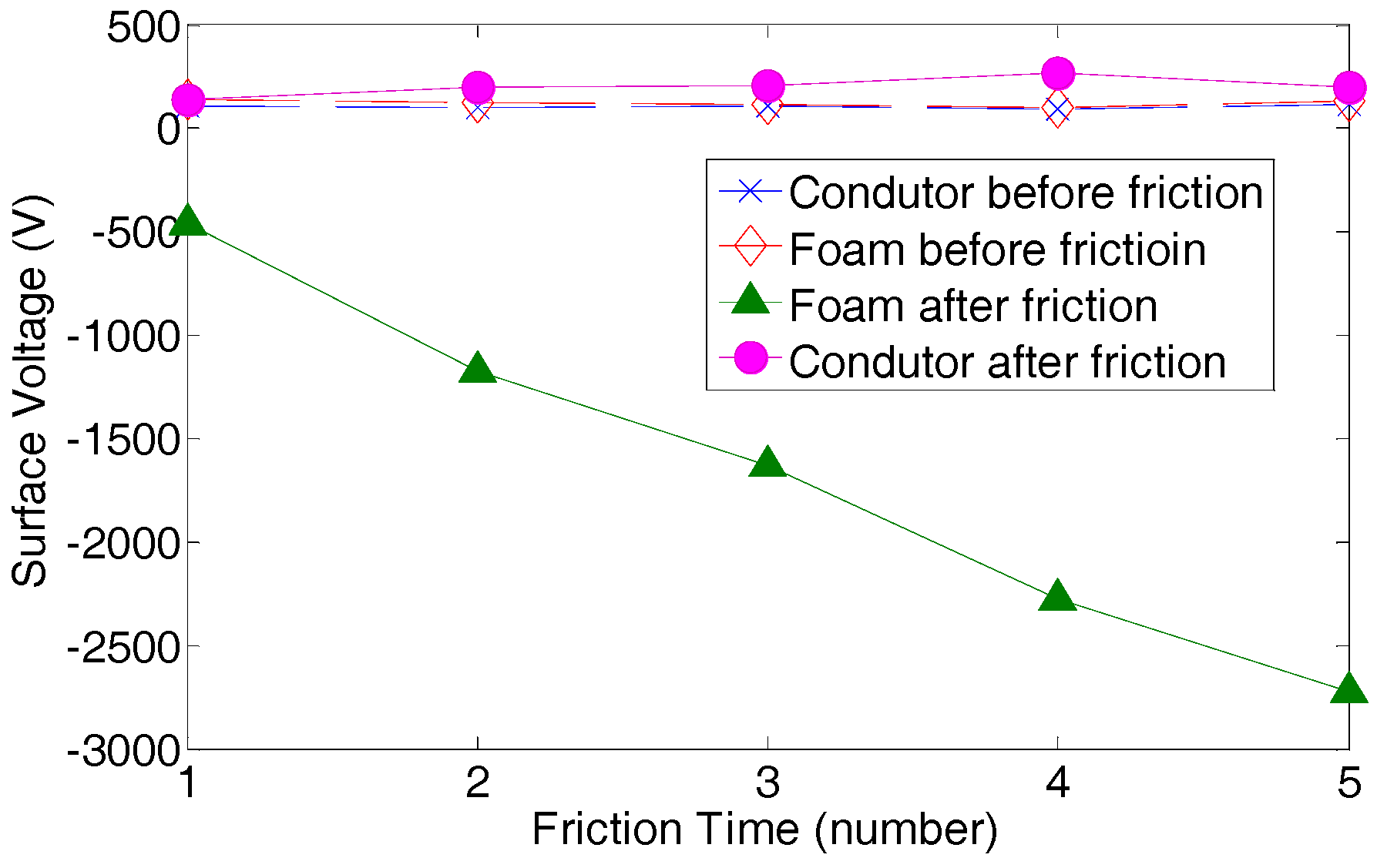
| Foam | Copper | 123.6 | 137.9 | −2725.6 | 201.6 |
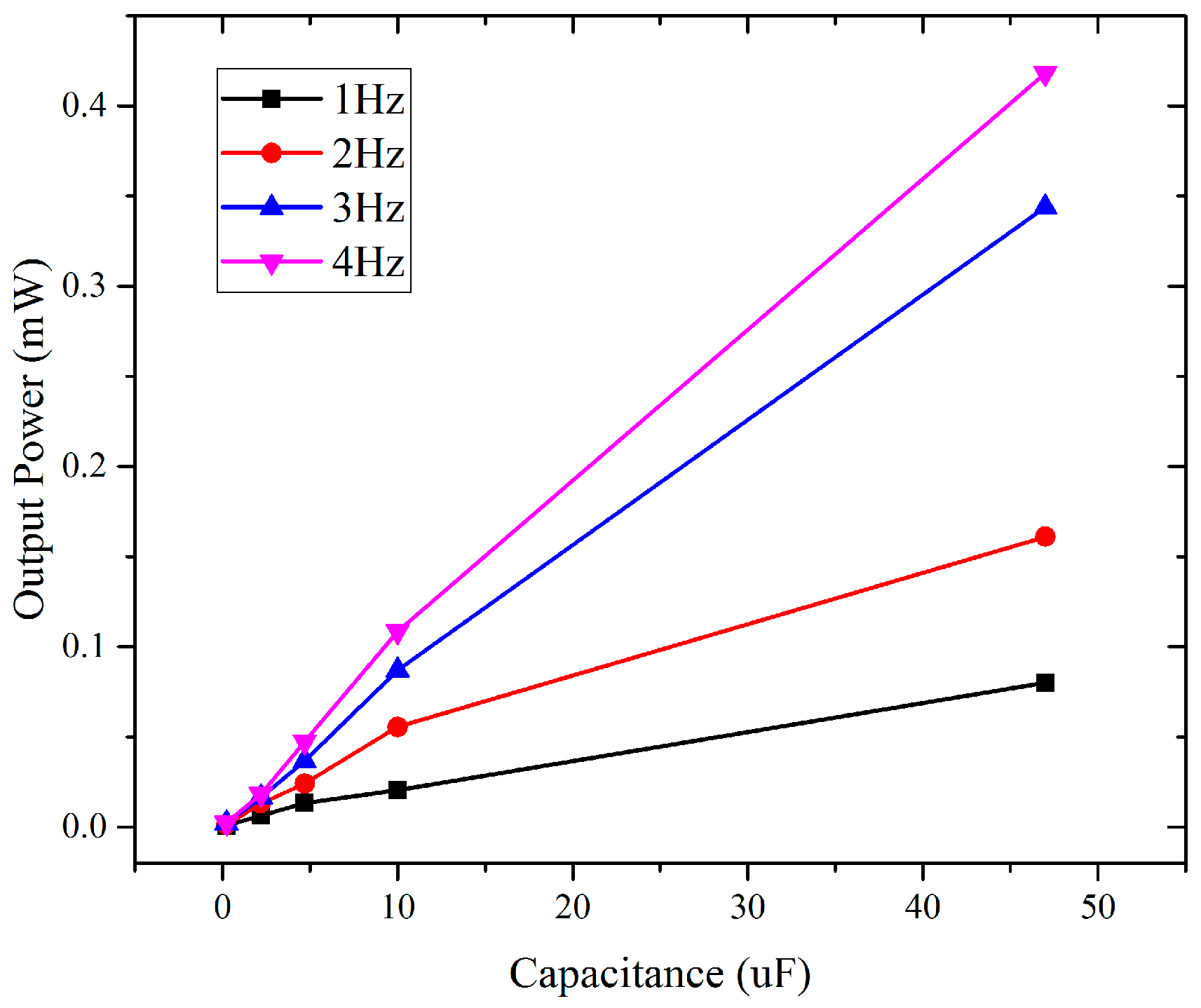
| Frequency (Hz) | Input Power (mW) | Output Power (mW) | Efficiency (%) |
|---|---|---|---|
| 1.0 | 3.6460 | 0.0802 | 2.1996 |
| 2.0 | 1.5351 | 0.1611 | 10.4918 |
| 3.0 | 1.3790 | 0.3439 | 24.9374 |
| 4.0 | 2.5519 | 0.4182 | 16.3891 |
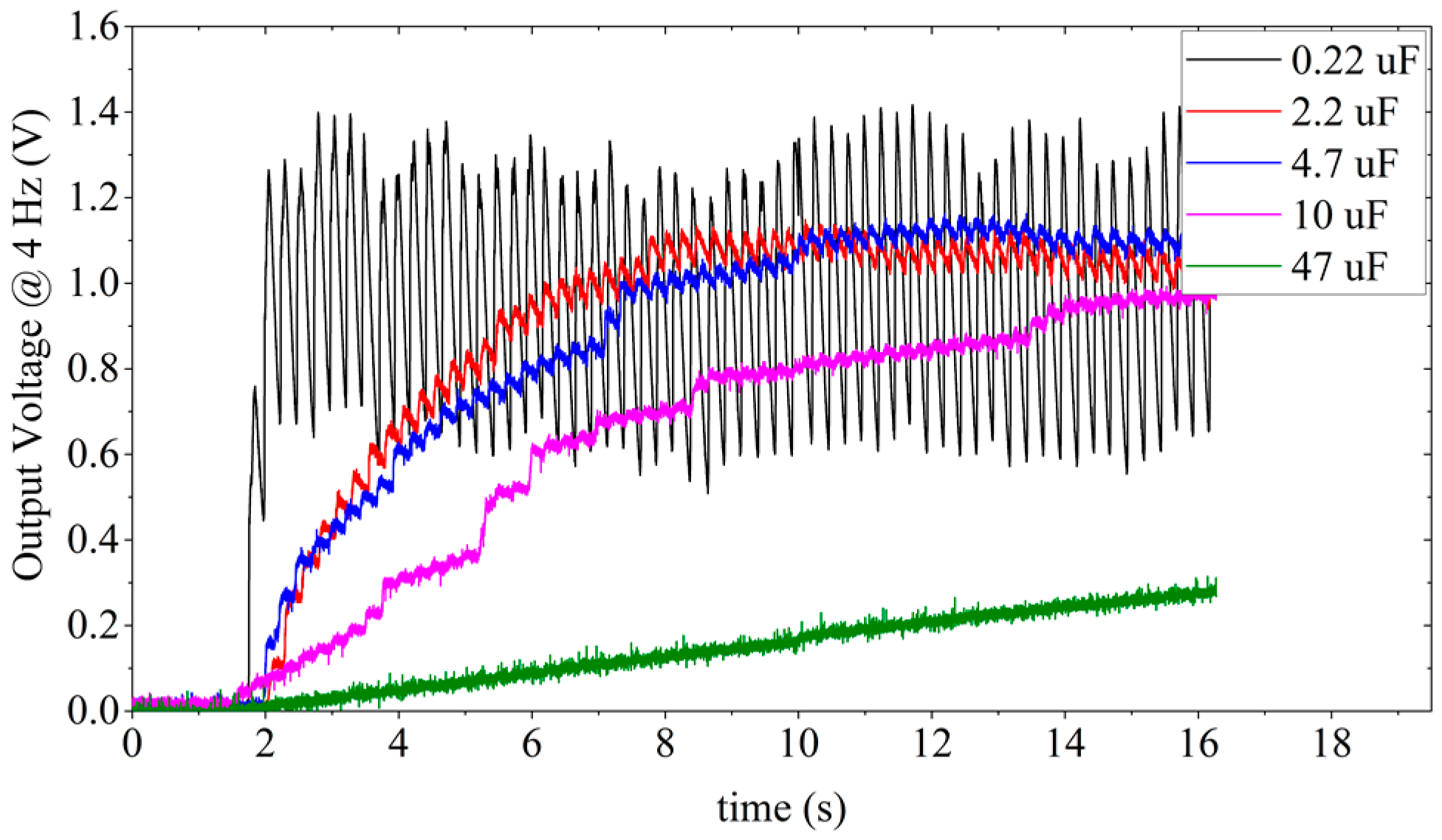
| Maximum Power (mW) | 1 Hz | 2 Hz | 3 Hz | 4 Hz |
|---|---|---|---|---|
| 0.22 µF | 0.0222 | 0.0220 | 0.0265 | 0.0542 |
| 2.2 µF | 0.0725 | 0.1182 | 0.1093 | 0.1700 |
| 4.7 µF | 0.1656 | 0.1974 | 0.2402 | 0.4299 |
| 10 µF | 0.1883 | 0.5115 | 0.5608 | 0.8986 |
| 47 µF | 0.8288 | 1.6001 | 2.5916 | 4.8113 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Sun, Y. WearETE: A Scalable Wearable E-Textile Triboelectric Energy Harvesting System for Human Motion Scavenging. Sensors 2017, 17, 2649. https://doi.org/10.3390/s17112649
Li X, Sun Y. WearETE: A Scalable Wearable E-Textile Triboelectric Energy Harvesting System for Human Motion Scavenging. Sensors. 2017; 17(11):2649. https://doi.org/10.3390/s17112649
Chicago/Turabian StyleLi, Xian, and Ye Sun. 2017. "WearETE: A Scalable Wearable E-Textile Triboelectric Energy Harvesting System for Human Motion Scavenging" Sensors 17, no. 11: 2649. https://doi.org/10.3390/s17112649
APA StyleLi, X., & Sun, Y. (2017). WearETE: A Scalable Wearable E-Textile Triboelectric Energy Harvesting System for Human Motion Scavenging. Sensors, 17(11), 2649. https://doi.org/10.3390/s17112649