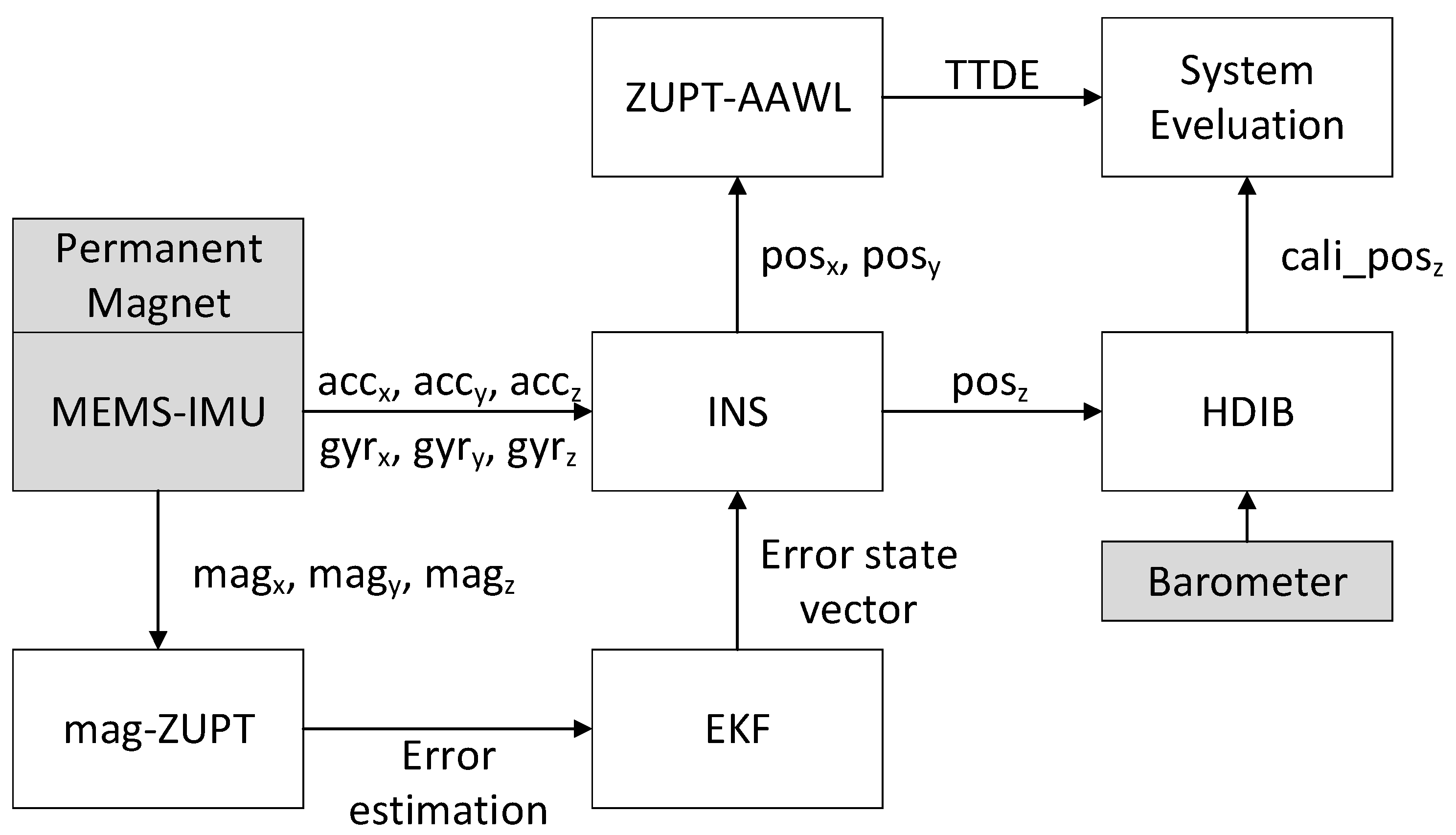
Figure 1.
Structure of this novel 3D positioning system.
Figure 1.
Structure of this novel 3D positioning system.
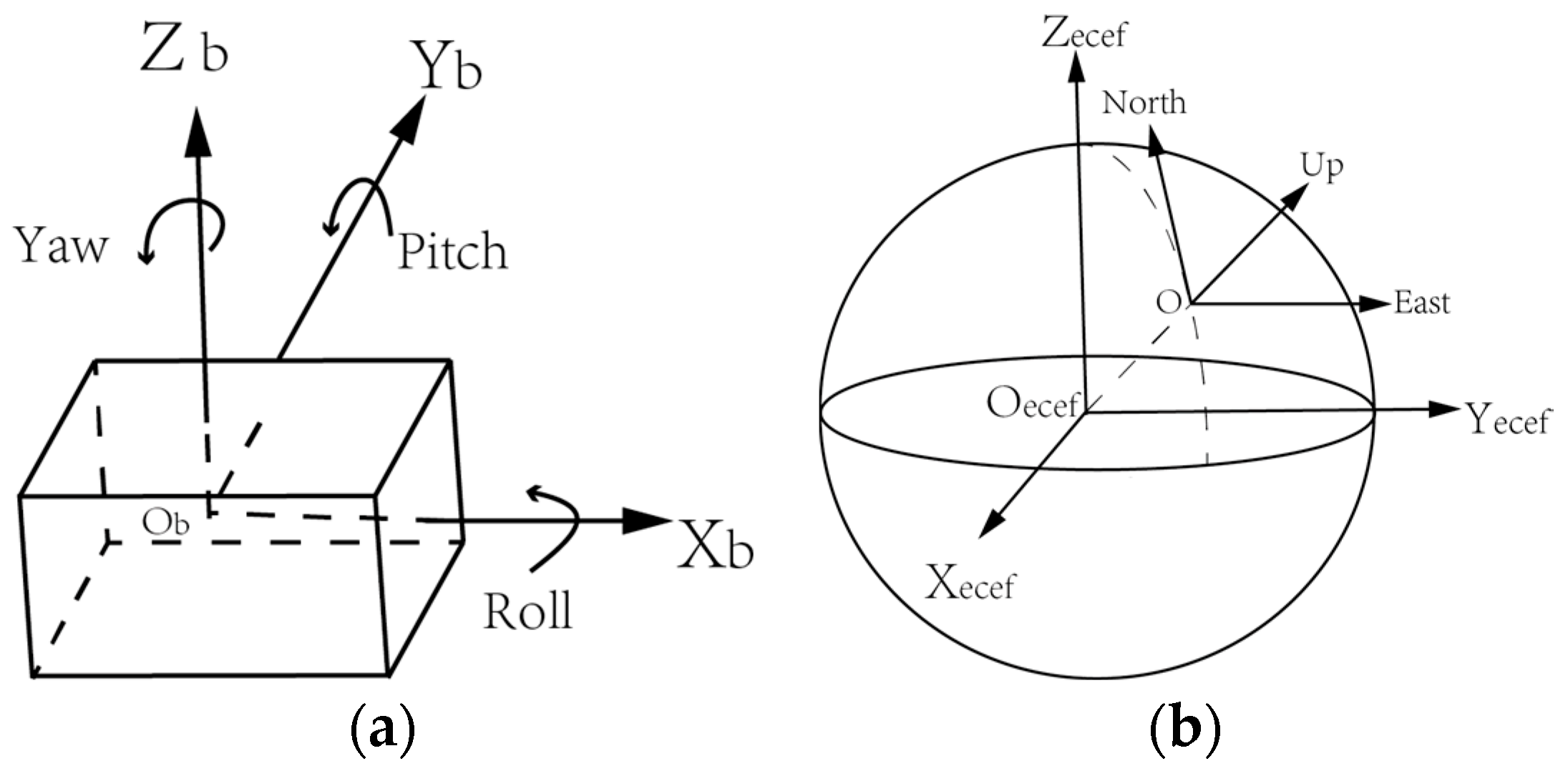
Figure 2.
Sketch map of sensor body coordinate frame (b-frame) and navigation coordinate frame (n-frame). (a) Shows the b-frame and three Euler angels which are yaw, pitch and roll; (b) shows the relation between earth-centered, earth fixed (ECEF) coordinate system and east-north-up (ENU) coordinate system. ENU is better to be applied in our system than ECEF because that it has the same origin with b-frame. Therefore, the rotation matrix will be simpler.
Figure 2.
Sketch map of sensor body coordinate frame (b-frame) and navigation coordinate frame (n-frame). (a) Shows the b-frame and three Euler angels which are yaw, pitch and roll; (b) shows the relation between earth-centered, earth fixed (ECEF) coordinate system and east-north-up (ENU) coordinate system. ENU is better to be applied in our system than ECEF because that it has the same origin with b-frame. Therefore, the rotation matrix will be simpler.
Figure 3.
Flowchart of the pedestrian navigation system with EKF and ZUPT.
Figure 3.
Flowchart of the pedestrian navigation system with EKF and ZUPT.
Figure 4.
Comparison of T in a walking and running gait pattern.
Figure 4.
Comparison of T in a walking and running gait pattern.
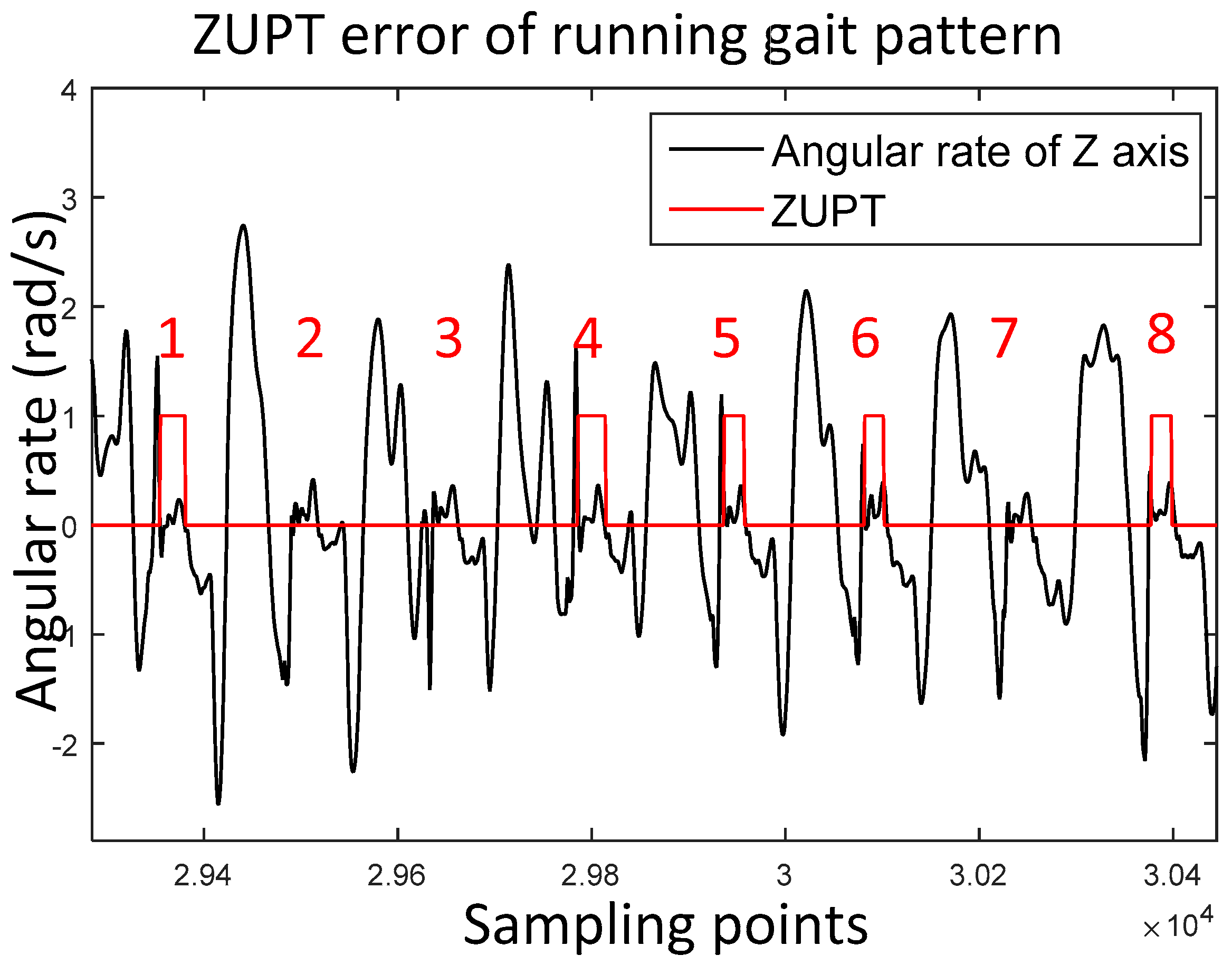
Figure 5.
Stance phase detection errors of running gait pattern. The black wave contains eight running gait cycles. The red line represents ZUPT results in which 1 is the stance phase and 0 is the swing phase. The numbers from 1 to 8 are the identifier of the gait cycle.
Figure 5.
Stance phase detection errors of running gait pattern. The black wave contains eight running gait cycles. The red line represents ZUPT results in which 1 is the stance phase and 0 is the swing phase. The numbers from 1 to 8 are the identifier of the gait cycle.
Figure 6.
Relationship of distance and magnetic field strength; (a) is a picture of the experiment scene. The left shoe is mounted with a MEMS-IMU and the right shoe is mounted with a permanent magnet. The right shoe moves along the ruler and stops every 10 cm; (b) is the result of the relationship between distance and magnetic field strength.
Figure 6.
Relationship of distance and magnetic field strength; (a) is a picture of the experiment scene. The left shoe is mounted with a MEMS-IMU and the right shoe is mounted with a permanent magnet. The right shoe moves along the ruler and stops every 10 cm; (b) is the result of the relationship between distance and magnetic field strength.
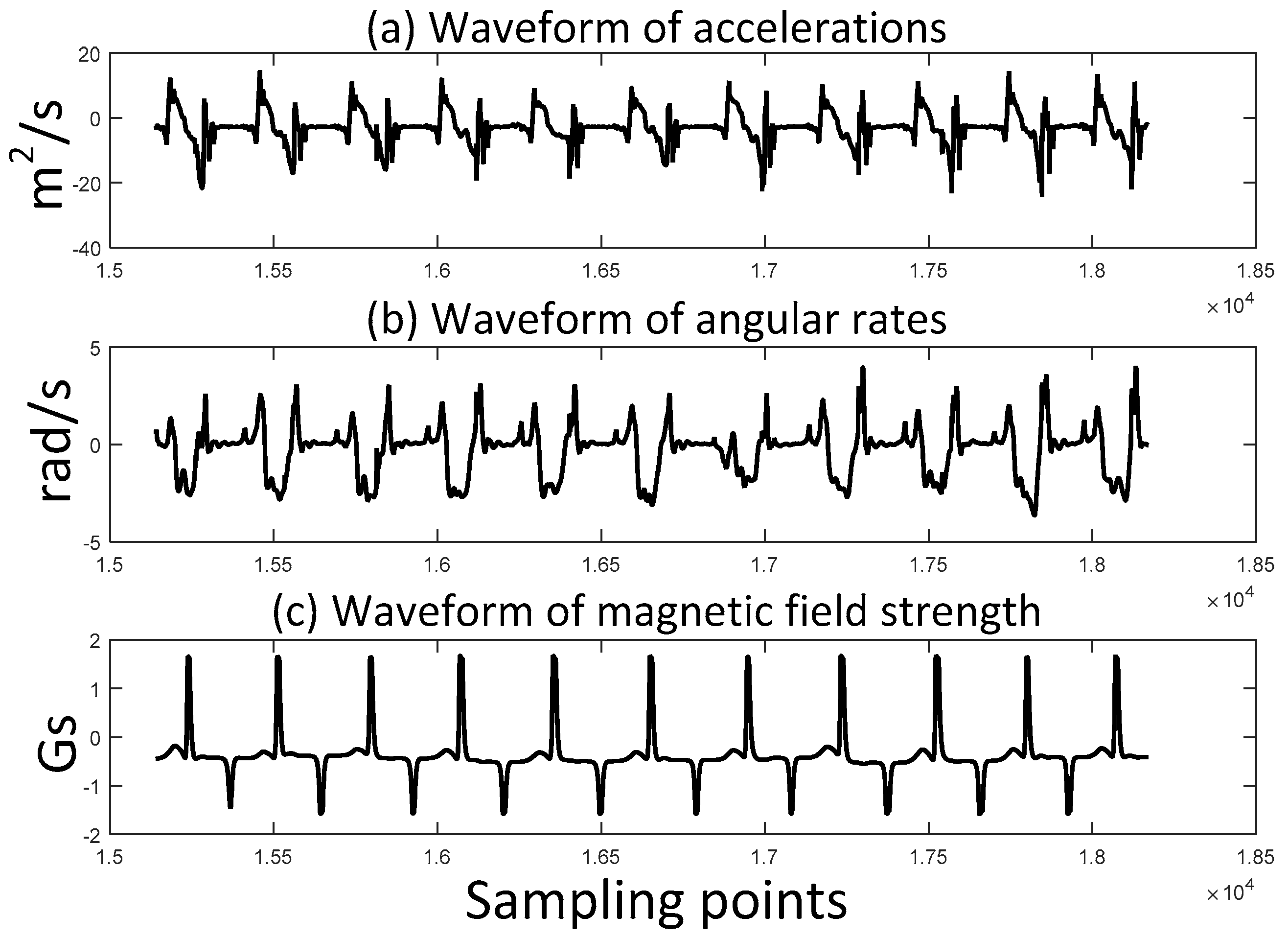
Figure 7.
Waveforms of accelerations, angular rates and magnetic field strength during the same time period of walking gait pattern.
Figure 7.
Waveforms of accelerations, angular rates and magnetic field strength during the same time period of walking gait pattern.
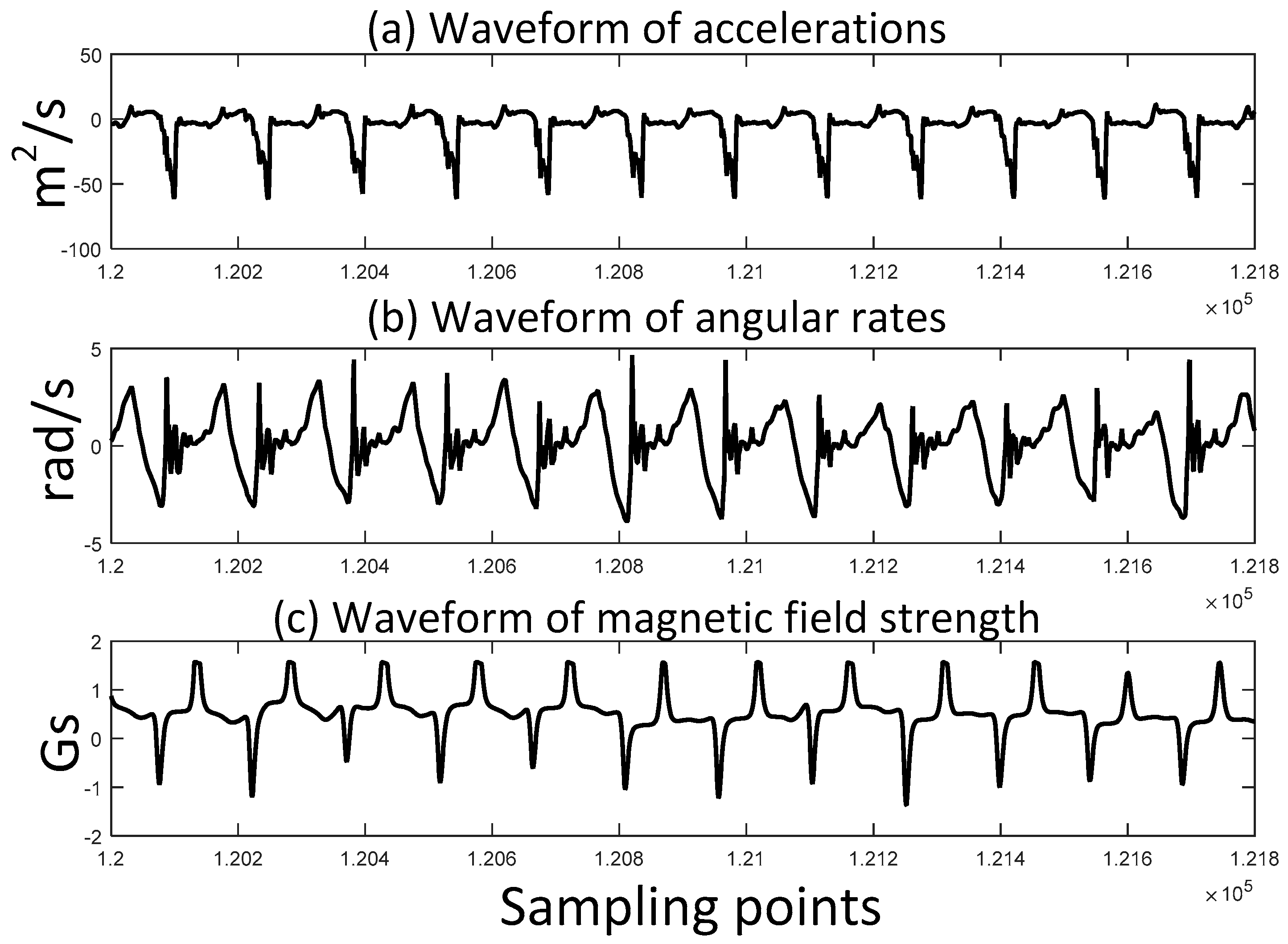
Figure 8.
Waveforms of accelerations, angular rates and magnetic field strength during the same time period of running gait pattern.
Figure 8.
Waveforms of accelerations, angular rates and magnetic field strength during the same time period of running gait pattern.
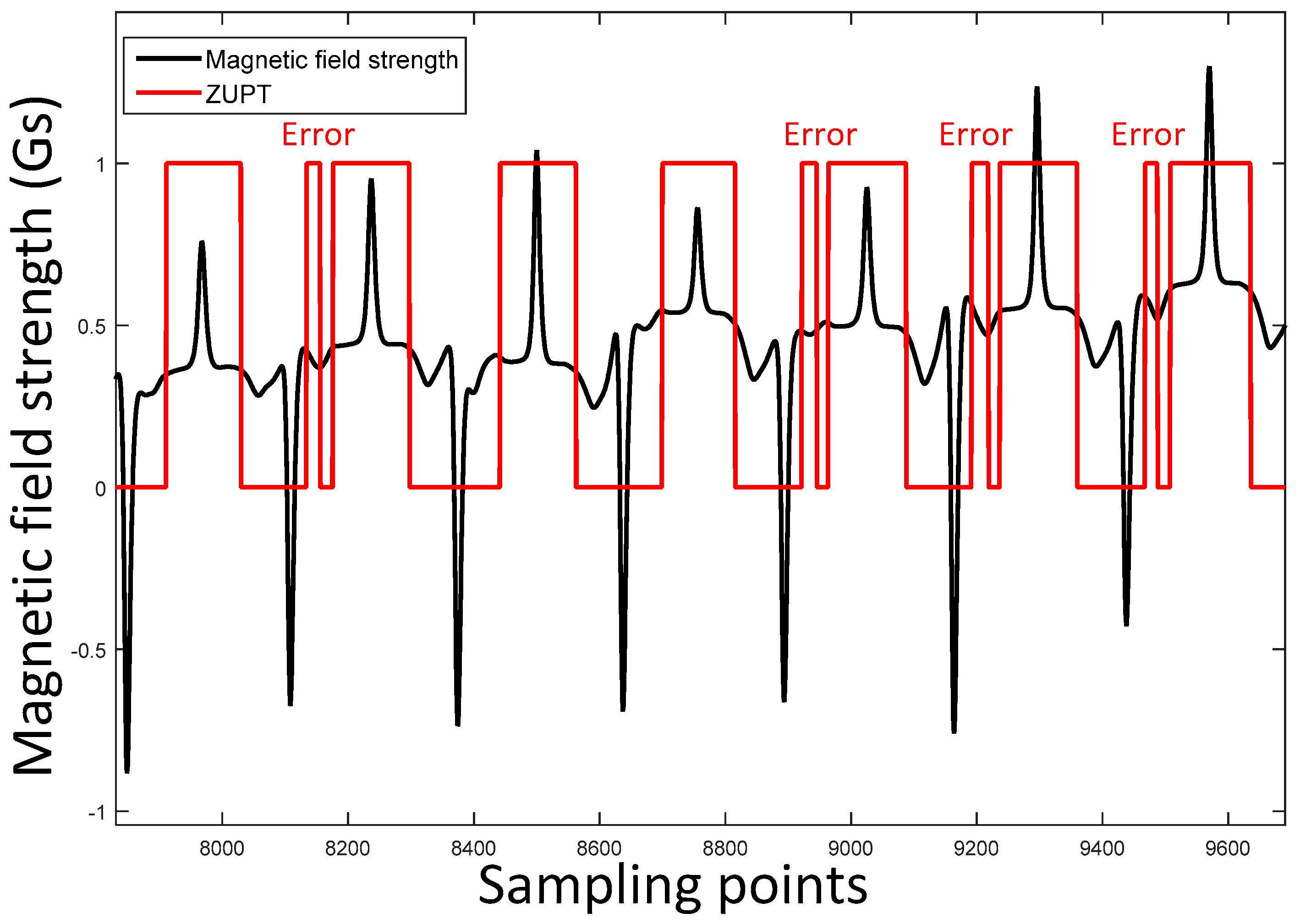
Figure 9.
ZUPT errors and the magnetic field strength waveform.
Figure 9.
ZUPT errors and the magnetic field strength waveform.
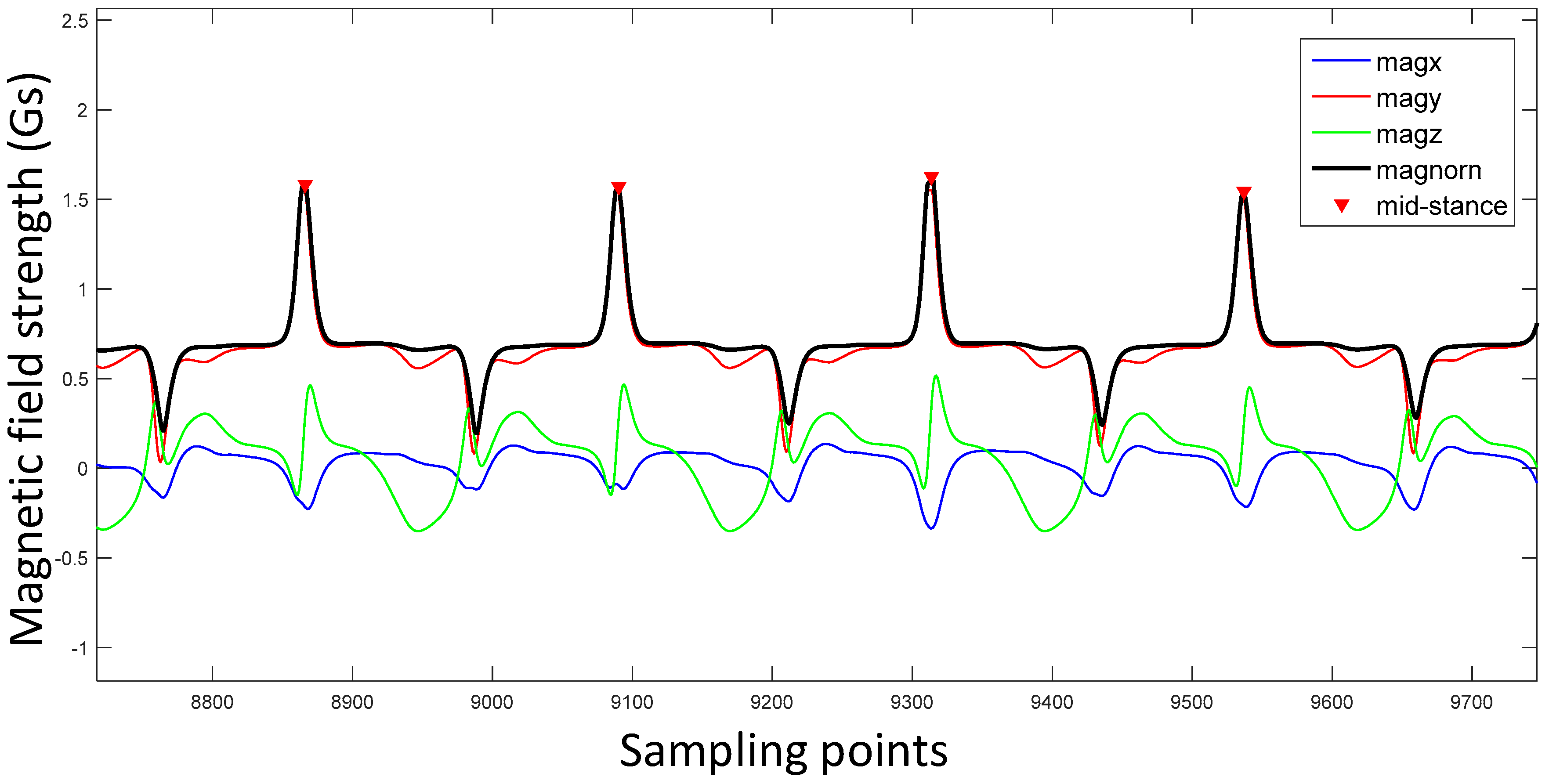
Figure 10.
Comparison of different magnetic field strength waveforms. The blue line, red line, green line and black line are magx, magy, magz and magnorm, respectively. Mid-stances (peaks) from magnorm are marked with red triangles.
Figure 10.
Comparison of different magnetic field strength waveforms. The blue line, red line, green line and black line are magx, magy, magz and magnorm, respectively. Mid-stances (peaks) from magnorm are marked with red triangles.
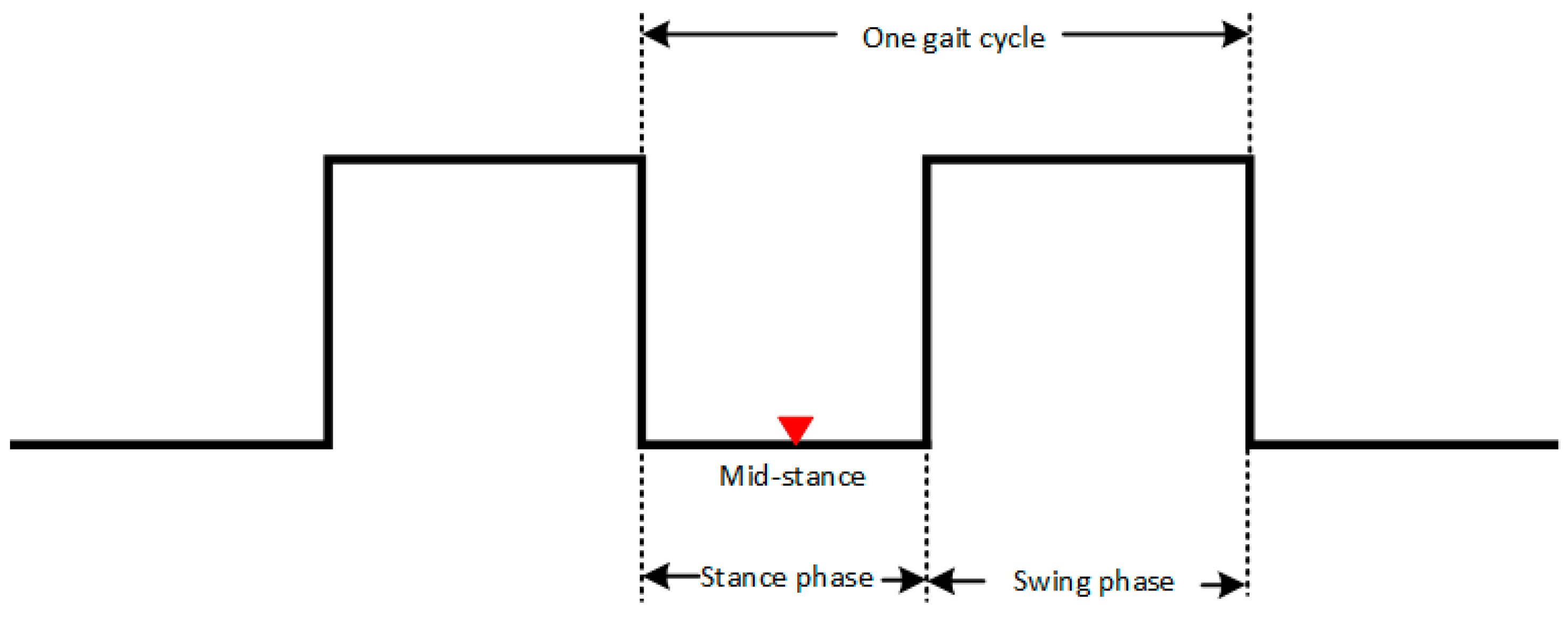
Figure 11.
Sketch map of one gait cycle. It contains stance phase and swing phase. Paper [
25] only shows how to detect mid-stance. We expend mid-stance to stance phase using stance phase duration information.
Figure 11.
Sketch map of one gait cycle. It contains stance phase and swing phase. Paper [
25] only shows how to detect mid-stance. We expend mid-stance to stance phase using stance phase duration information.
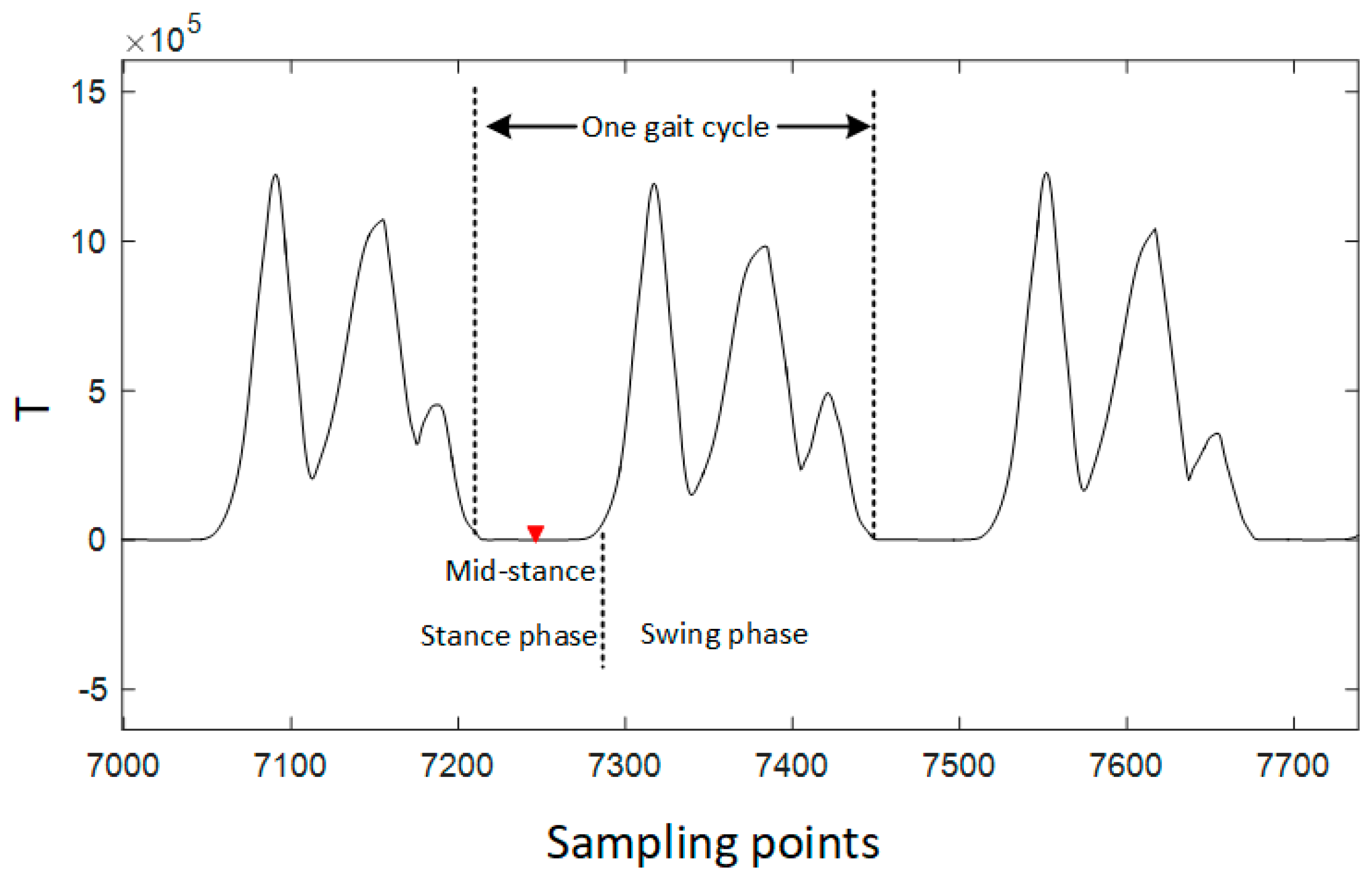
Figure 12.
Relationship of mid-stance, stance phase, swing phase and gait cycle. Mid-stance can be expanded to stance phase using stance phase duration information. T is the test statics of SHOE detector.
Figure 12.
Relationship of mid-stance, stance phase, swing phase and gait cycle. Mid-stance can be expanded to stance phase using stance phase duration information. T is the test statics of SHOE detector.
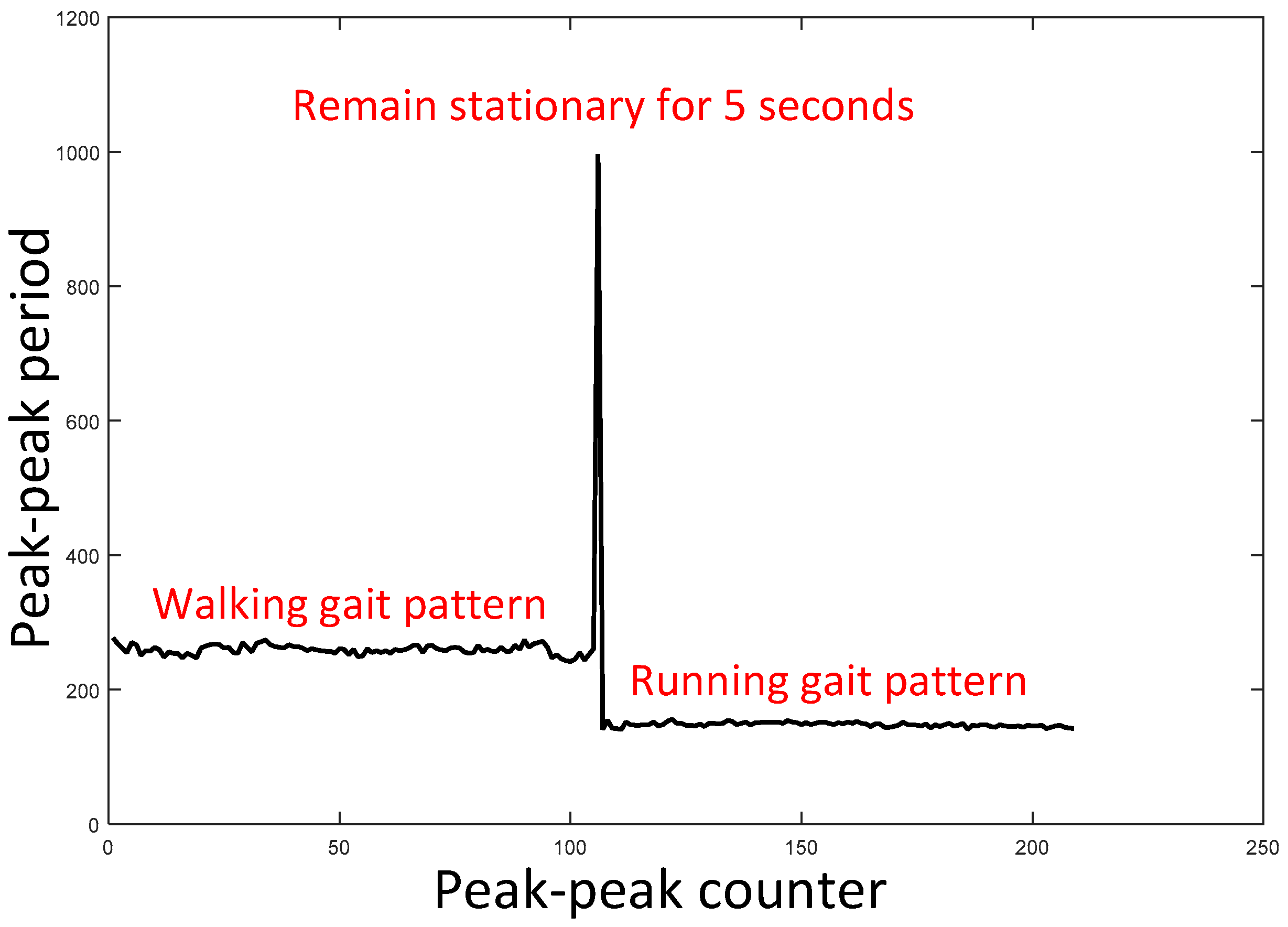
Figure 13.
Using peak-peak time period information to distinguish walking/running gait pattern.
Figure 13.
Using peak-peak time period information to distinguish walking/running gait pattern.
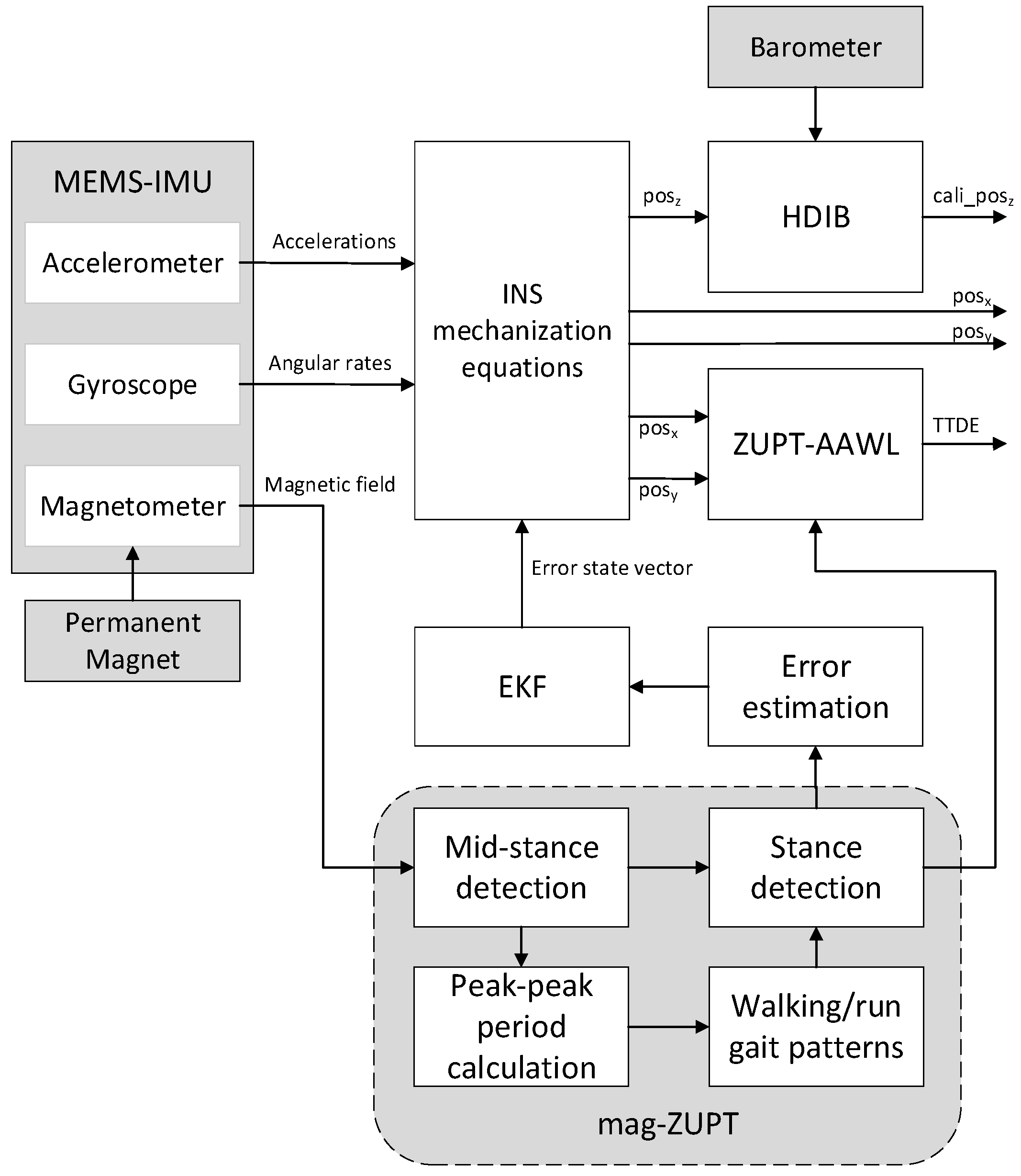
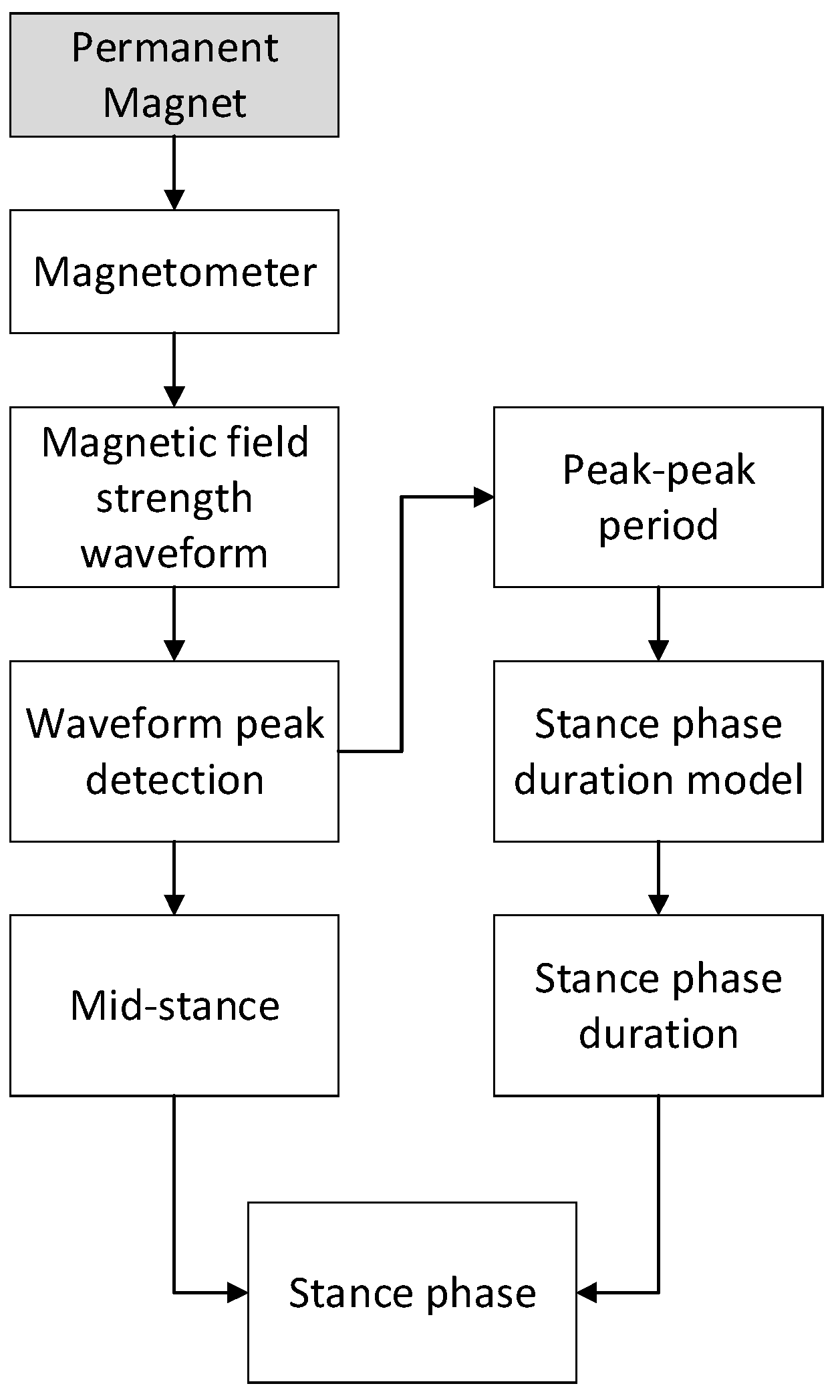
Figure 14.
Flowchart of mag-ZUPT. Mid-stance (peak) is extracted from magnetic field strength waveforms. Peak-peak period is used to distinguish walking/running gait patterns and then to obtain stance phase duration. Finally, mid-stance is expanded to stance phase.
Figure 14.
Flowchart of mag-ZUPT. Mid-stance (peak) is extracted from magnetic field strength waveforms. Peak-peak period is used to distinguish walking/running gait patterns and then to obtain stance phase duration. Finally, mid-stance is expanded to stance phase.
Figure 15.
Traditional ZUPT and mag-ZUPT results in walking and running gait patterns; (a) is the walking scenario. The two ZUPT detectors have a similar performance; (b) is the running scenario. Seven stance phases are correctly detected by mag-ZUPT while only one stance phase is detected by traditional ZUPT.
Figure 15.
Traditional ZUPT and mag-ZUPT results in walking and running gait patterns; (a) is the walking scenario. The two ZUPT detectors have a similar performance; (b) is the running scenario. Seven stance phases are correctly detected by mag-ZUPT while only one stance phase is detected by traditional ZUPT.
Figure 16.
Positioning results of a walking/running mix trajectory. The first half path is walking and the second half path is running. Traditional ZUPT cannot detect stance phase correctly of running gait pattern, therefore the positioning result diverges rapidly.
Figure 16.
Positioning results of a walking/running mix trajectory. The first half path is walking and the second half path is running. Traditional ZUPT cannot detect stance phase correctly of running gait pattern, therefore the positioning result diverges rapidly.
Figure 17.
The atmospheric pressure fluctuates when the pedestrian walks on the same height; (a) is the atmospheric pressure; (b) is the height estimation error caused by atmospheric pressure fluctuation. The red line in (b) is the true vertical position (0 m).
Figure 17.
The atmospheric pressure fluctuates when the pedestrian walks on the same height; (a) is the atmospheric pressure; (b) is the height estimation error caused by atmospheric pressure fluctuation. The red line in (b) is the true vertical position (0 m).
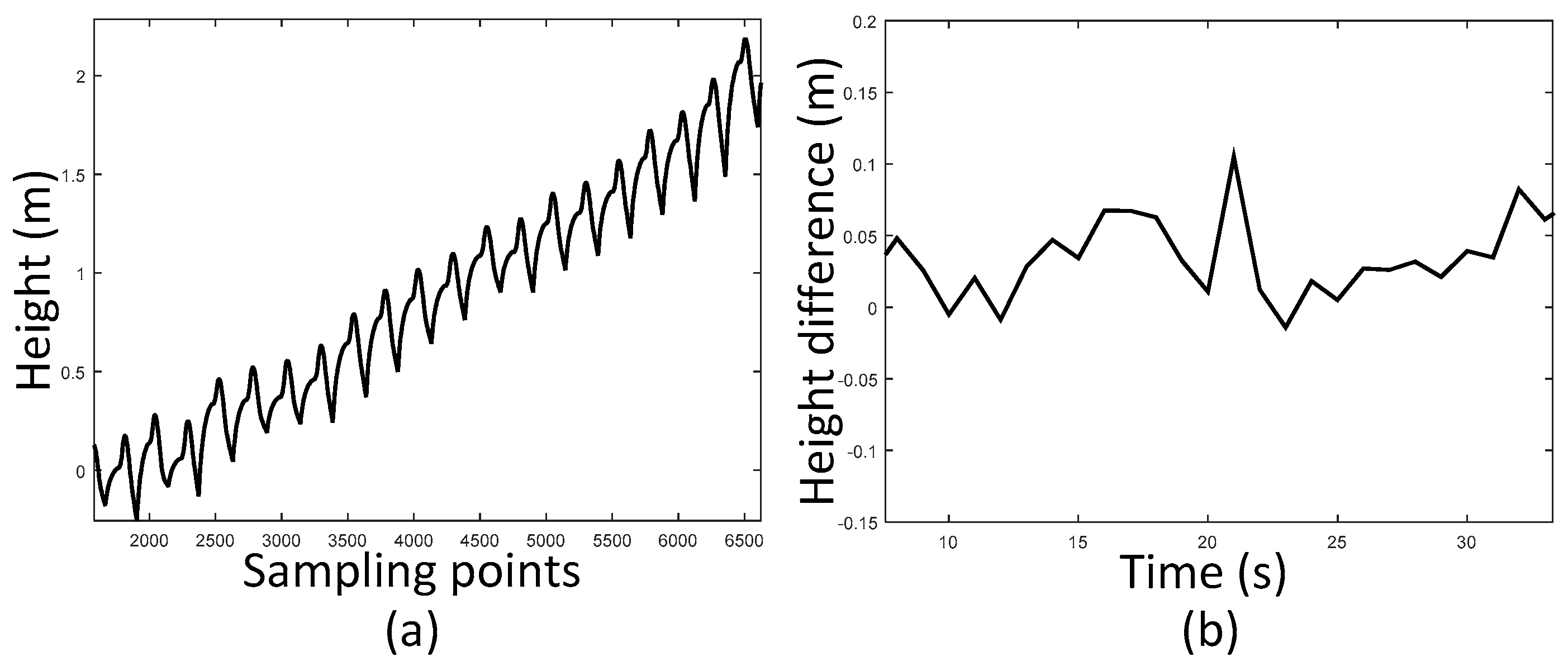
Figure 18.
The accumulative error of height estimation and the height difference every one second; (a) is the accumulative error. It reaches 2 m after 5000 sampling points (25 s); (b) is the height difference every one second. Although the height error accumulated, the height difference stay steady and it is possible to use this information to aid barometer to estimate the height more precisely.
Figure 18.
The accumulative error of height estimation and the height difference every one second; (a) is the accumulative error. It reaches 2 m after 5000 sampling points (25 s); (b) is the height difference every one second. Although the height error accumulated, the height difference stay steady and it is possible to use this information to aid barometer to estimate the height more precisely.
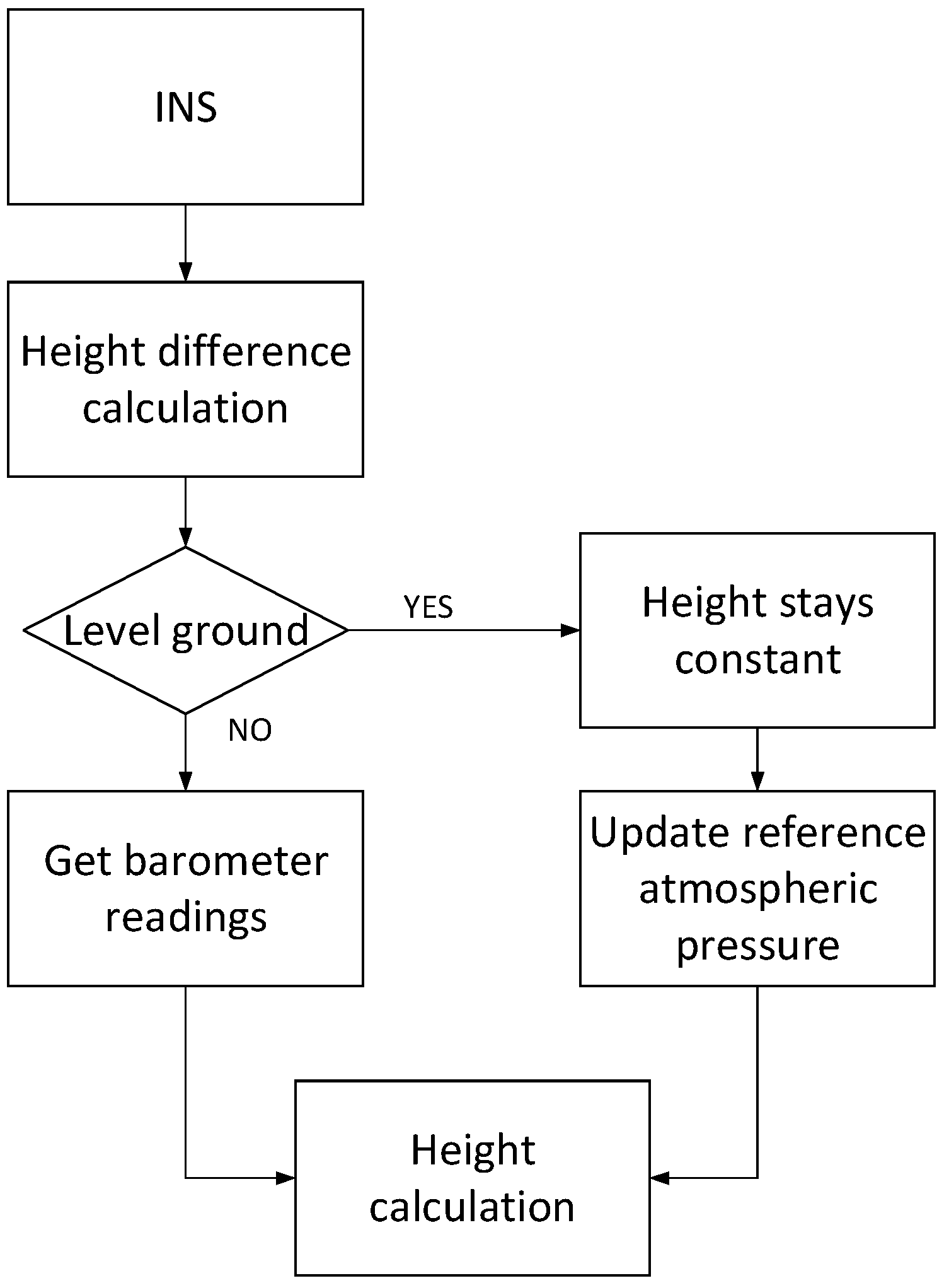
Figure 19.
Flowchart of height difference information aided barometer (HDIB) algorithm.
Figure 19.
Flowchart of height difference information aided barometer (HDIB) algorithm.
Figure 20.
Height difference and the level ground/upstairs/downstairs estimation results. LG is short for level ground. U is short for upstairs. D is short for downstairs.
Figure 20.
Height difference and the level ground/upstairs/downstairs estimation results. LG is short for level ground. U is short for upstairs. D is short for downstairs.
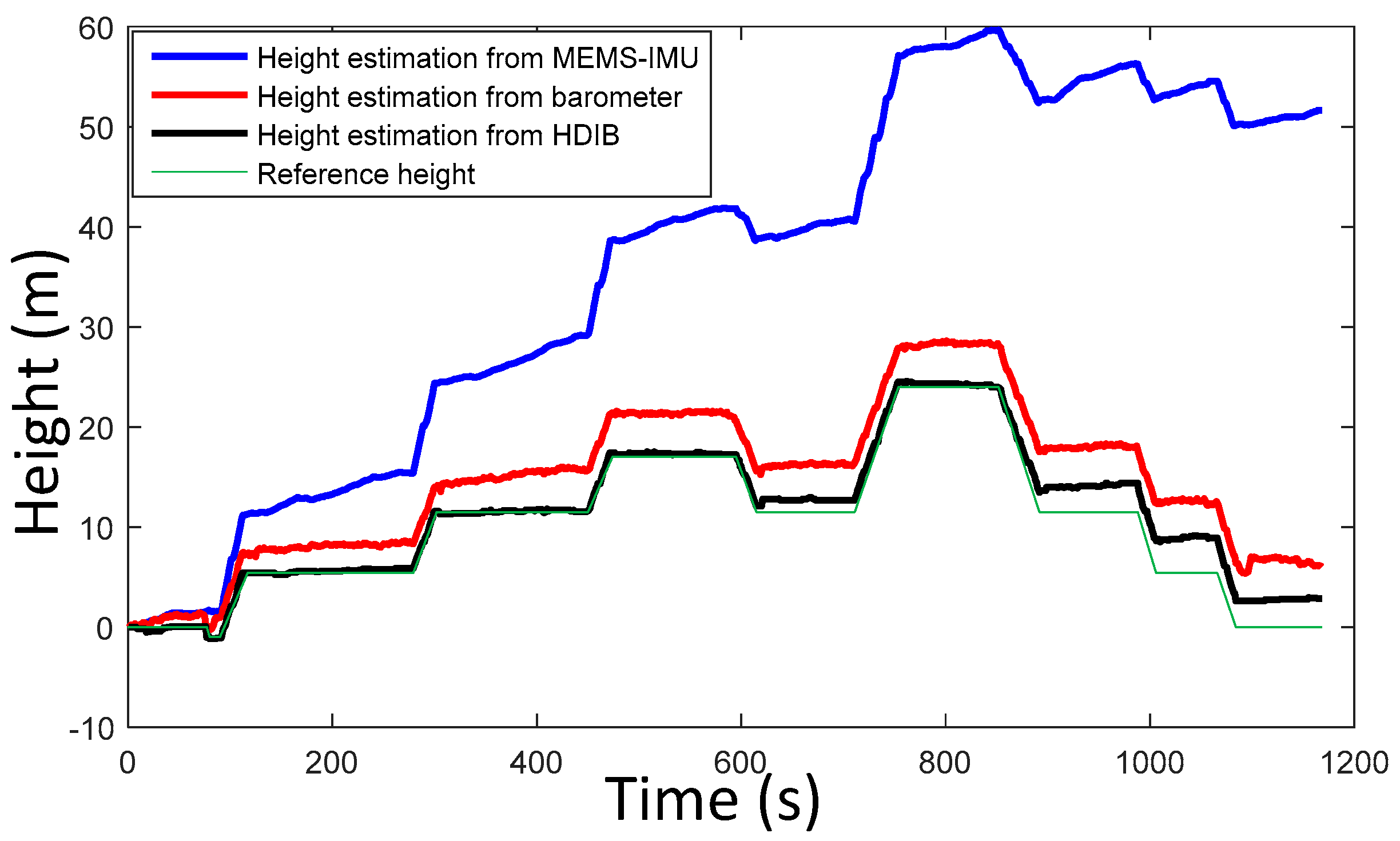
Figure 21.
Height estimation using MEMS-IMU, barometer and HDIB. The blue line, red line and black line are height estimation from MEMS-IMU, barometer and HDIB, respectively. The green line is the reference height (true height).
Figure 21.
Height estimation using MEMS-IMU, barometer and HDIB. The blue line, red line and black line are height estimation from MEMS-IMU, barometer and HDIB, respectively. The green line is the reference height (true height).
Figure 22.
The sketch map of the trajectory of IMU-foot. There are four gait cycles in this figure. Red dots represent that IMU-foot is on the ground which is the mid-stance.
Figure 22.
The sketch map of the trajectory of IMU-foot. There are four gait cycles in this figure. Red dots represent that IMU-foot is on the ground which is the mid-stance.
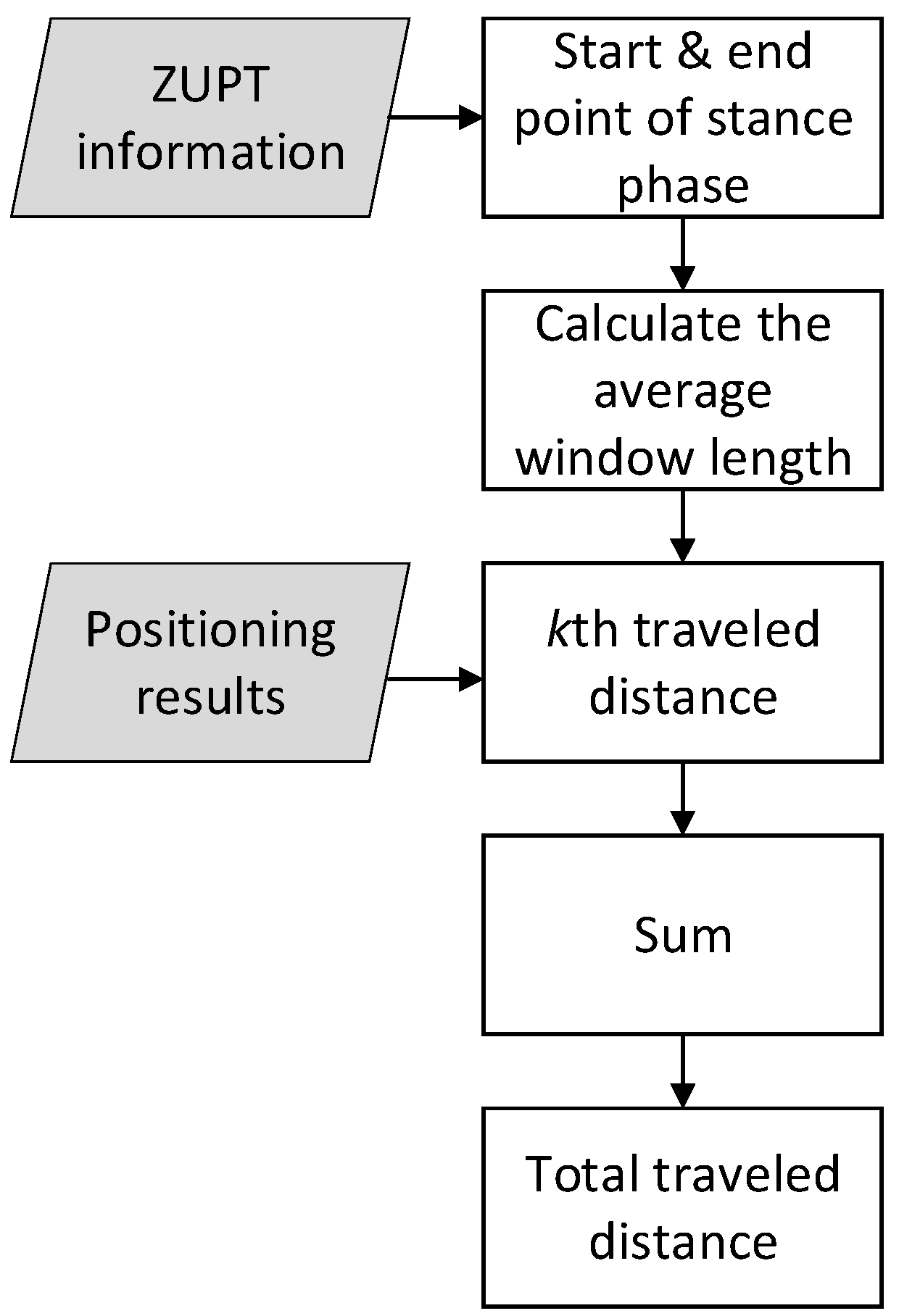
Figure 23.
Flowchart of ZUPT-AAWL.
Figure 23.
Flowchart of ZUPT-AAWL.
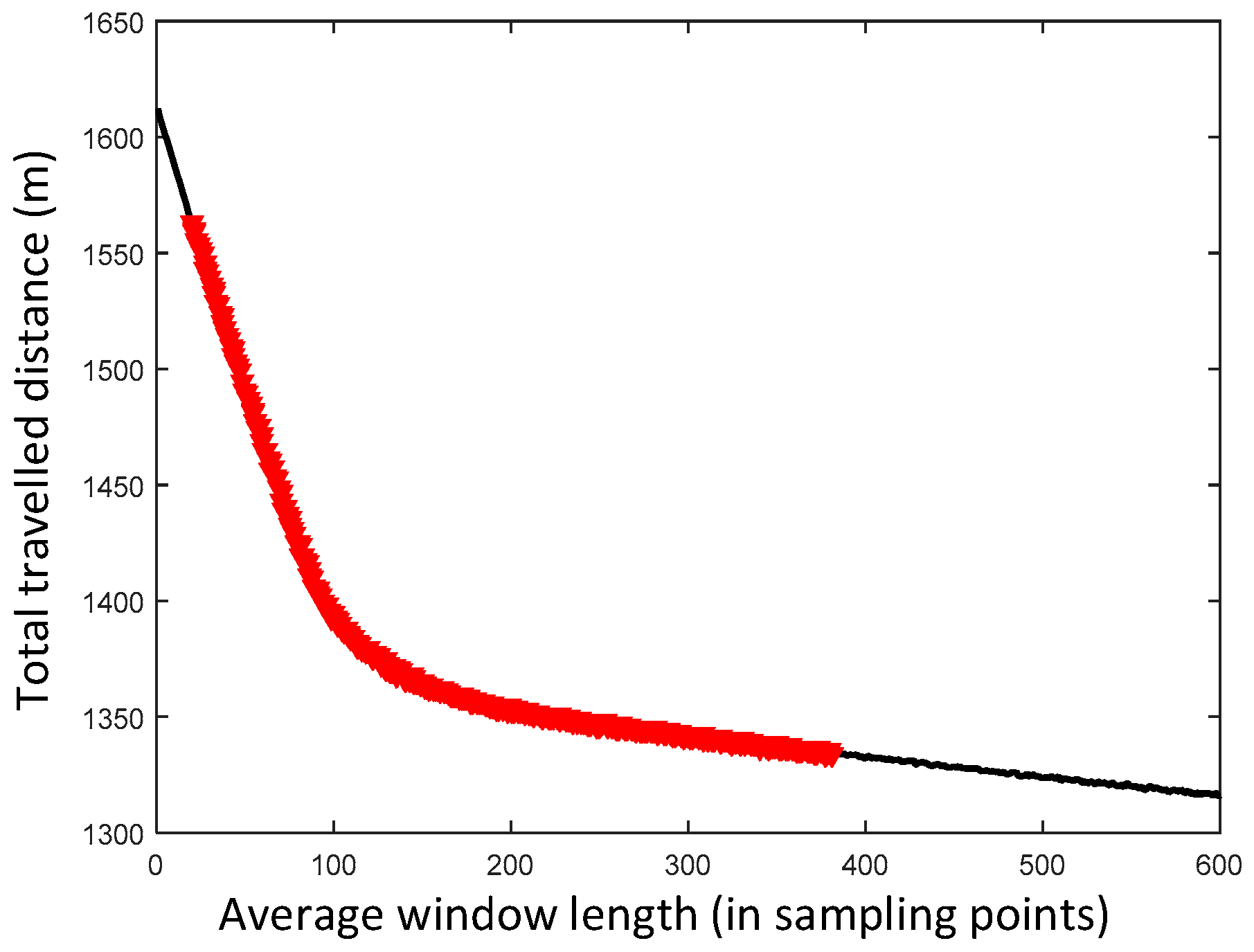
Figure 24.
Relationship of total travelled distance and average window length. The red dots are range of ZUPT-AAWL average window length which ranges from 20 to 381 sampling points.
Figure 24.
Relationship of total travelled distance and average window length. The red dots are range of ZUPT-AAWL average window length which ranges from 20 to 381 sampling points.
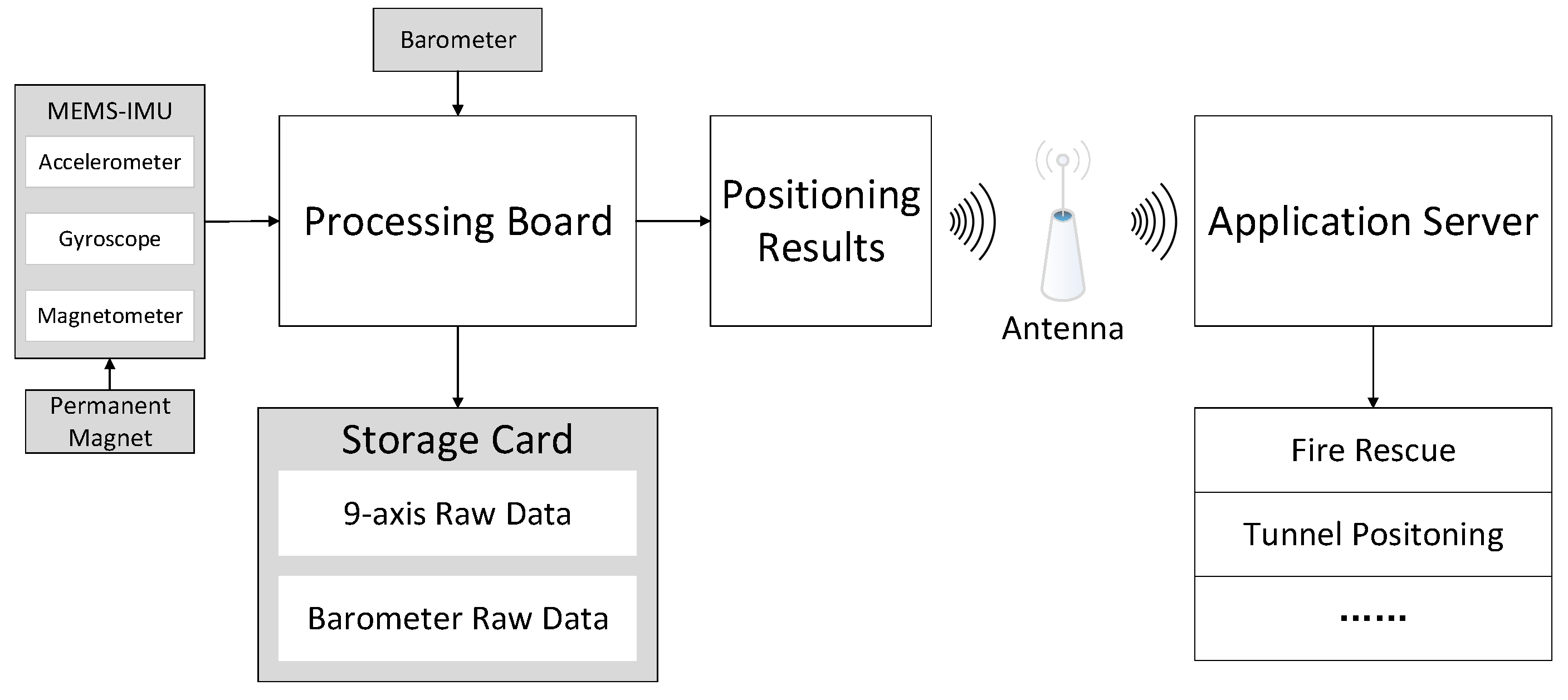
Figure 25.
Hardware structure of the 3D positioning system.
Figure 25.
Hardware structure of the 3D positioning system.
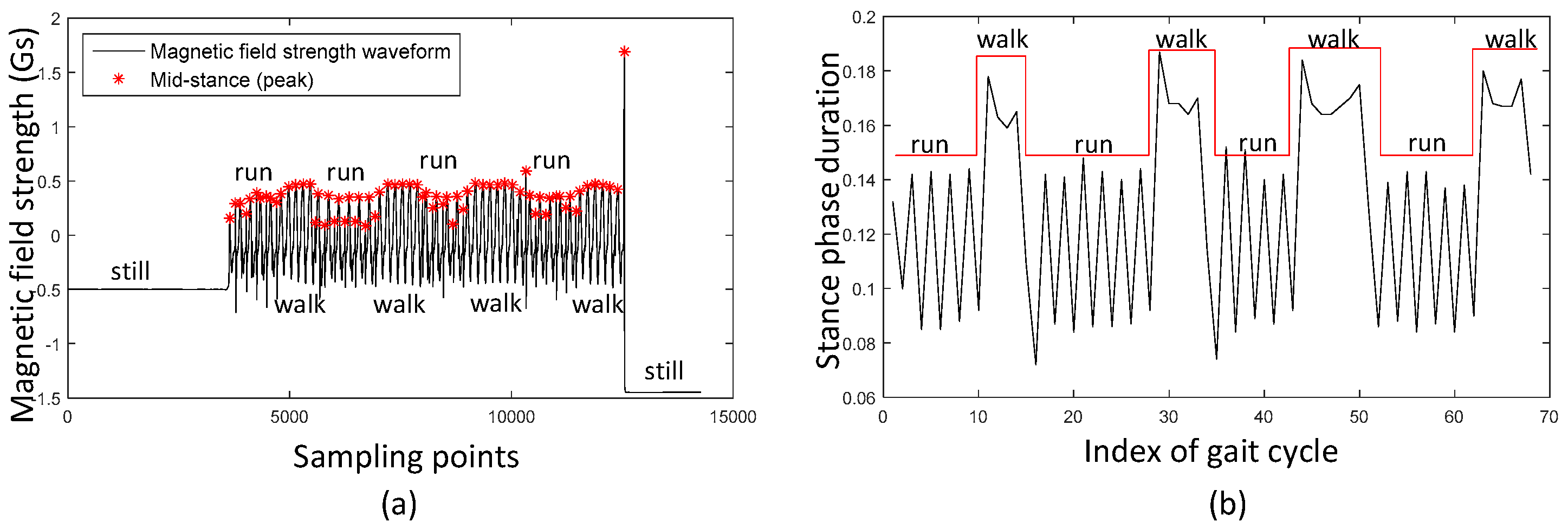
Figure 26.
Mid-stance and stance phase duration of Mix_1; (a) is magnetic field strength waveform and mid-stances (peaks) extracted from this wave; (b) is stance phase duration with different gait cycles. Peak-peak information can represent movement patterns including walking and running. Stance phase duration is calculated according to peak-peak information.
Figure 26.
Mid-stance and stance phase duration of Mix_1; (a) is magnetic field strength waveform and mid-stances (peaks) extracted from this wave; (b) is stance phase duration with different gait cycles. Peak-peak information can represent movement patterns including walking and running. Stance phase duration is calculated according to peak-peak information.
Figure 27.
Height estimation results of MEMS-IMU, Barometer and HDIB of Height_4 trajectory. The blue line, red line and black line are height estimation from MEMS-IMU, barometer and HDIB, respectively. The green line is the reference height (true height).
Figure 27.
Height estimation results of MEMS-IMU, Barometer and HDIB of Height_4 trajectory. The blue line, red line and black line are height estimation from MEMS-IMU, barometer and HDIB, respectively. The green line is the reference height (true height).
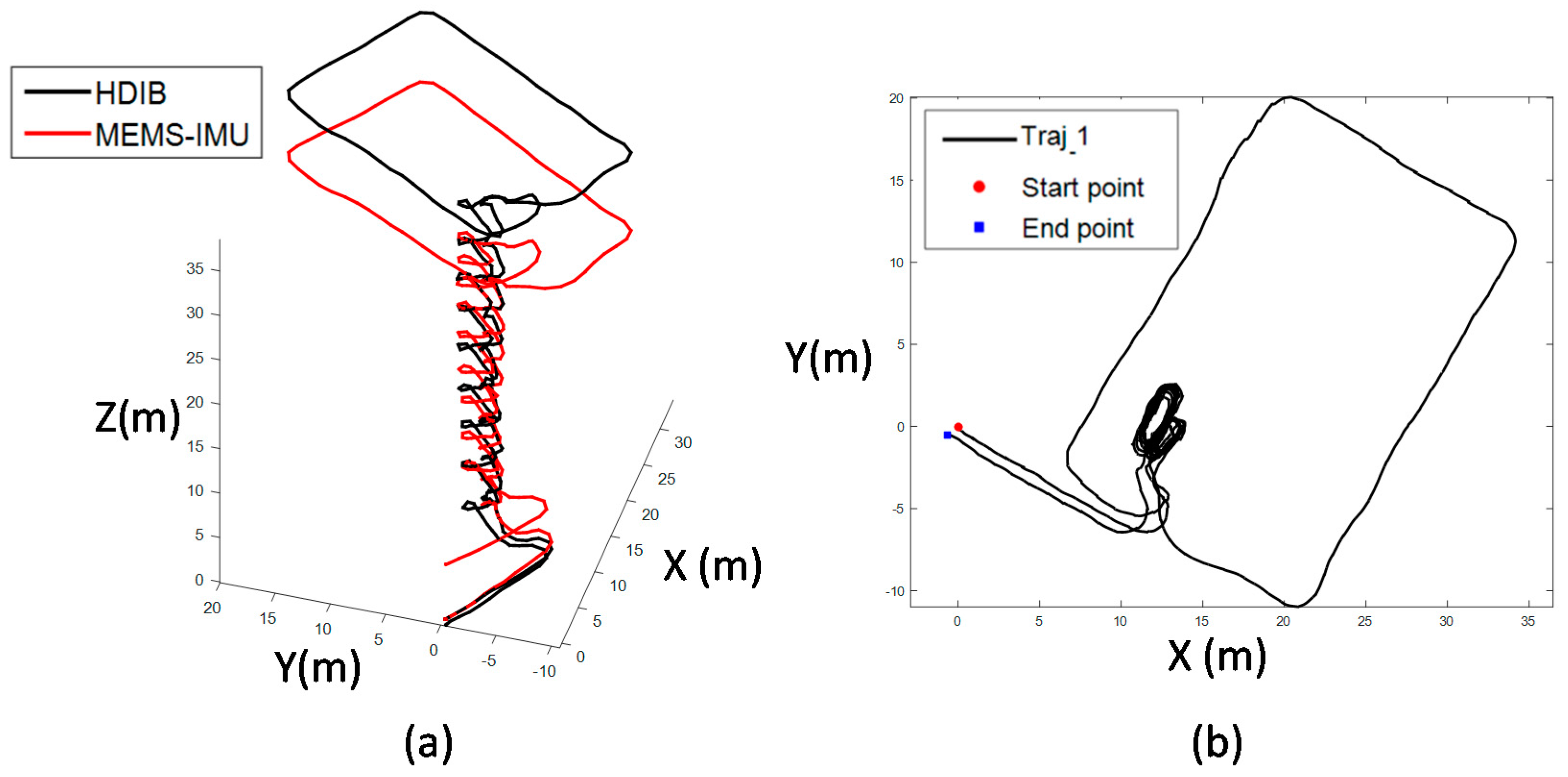
Figure 28.
Positioning result of Traj_1; (a) is the 3D view of the positioning result; (b) is the top view of the positioning result. TTDE of Traj_1 is 0.32% and the height error is 0.68 m.
Figure 28.
Positioning result of Traj_1; (a) is the 3D view of the positioning result; (b) is the top view of the positioning result. TTDE of Traj_1 is 0.32% and the height error is 0.68 m.
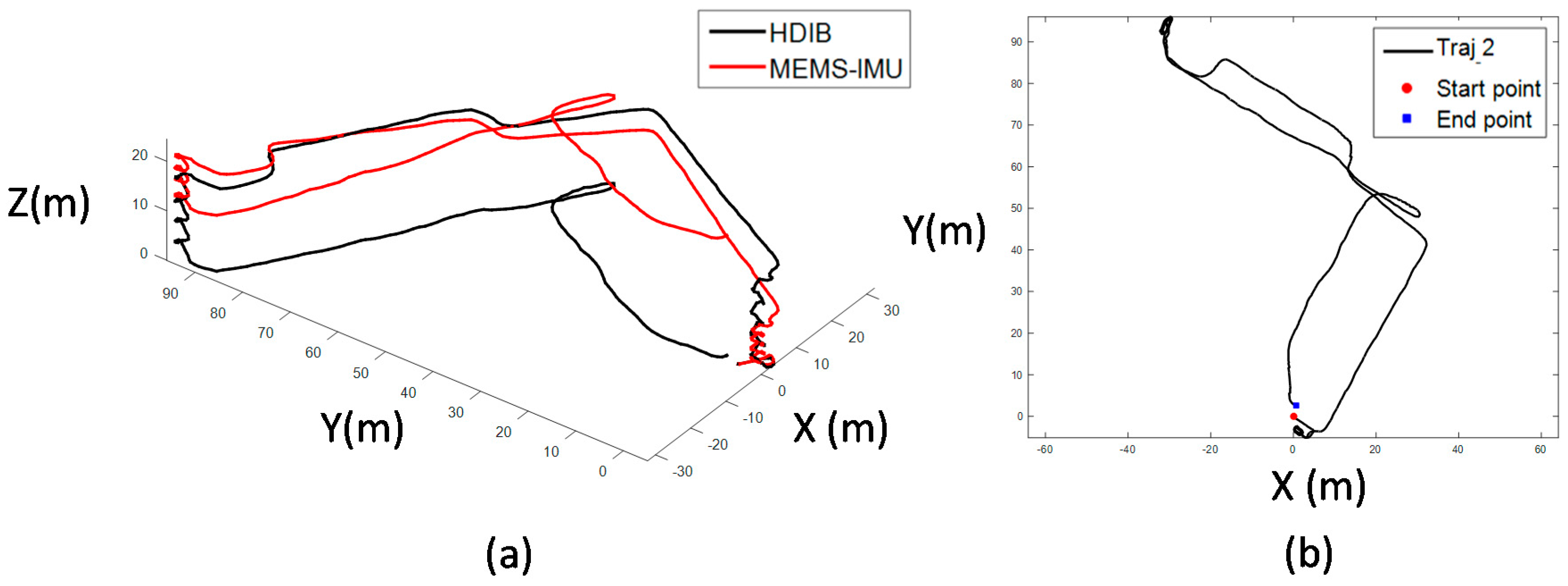
Figure 29.
Positioning result of Traj_2; (a) is the 3D view of the positioning result; (b) is the top view of the positioning result. TTDE of Traj_2 is 0.76% and the height error is 0.27 m.
Figure 29.
Positioning result of Traj_2; (a) is the 3D view of the positioning result; (b) is the top view of the positioning result. TTDE of Traj_2 is 0.76% and the height error is 0.27 m.
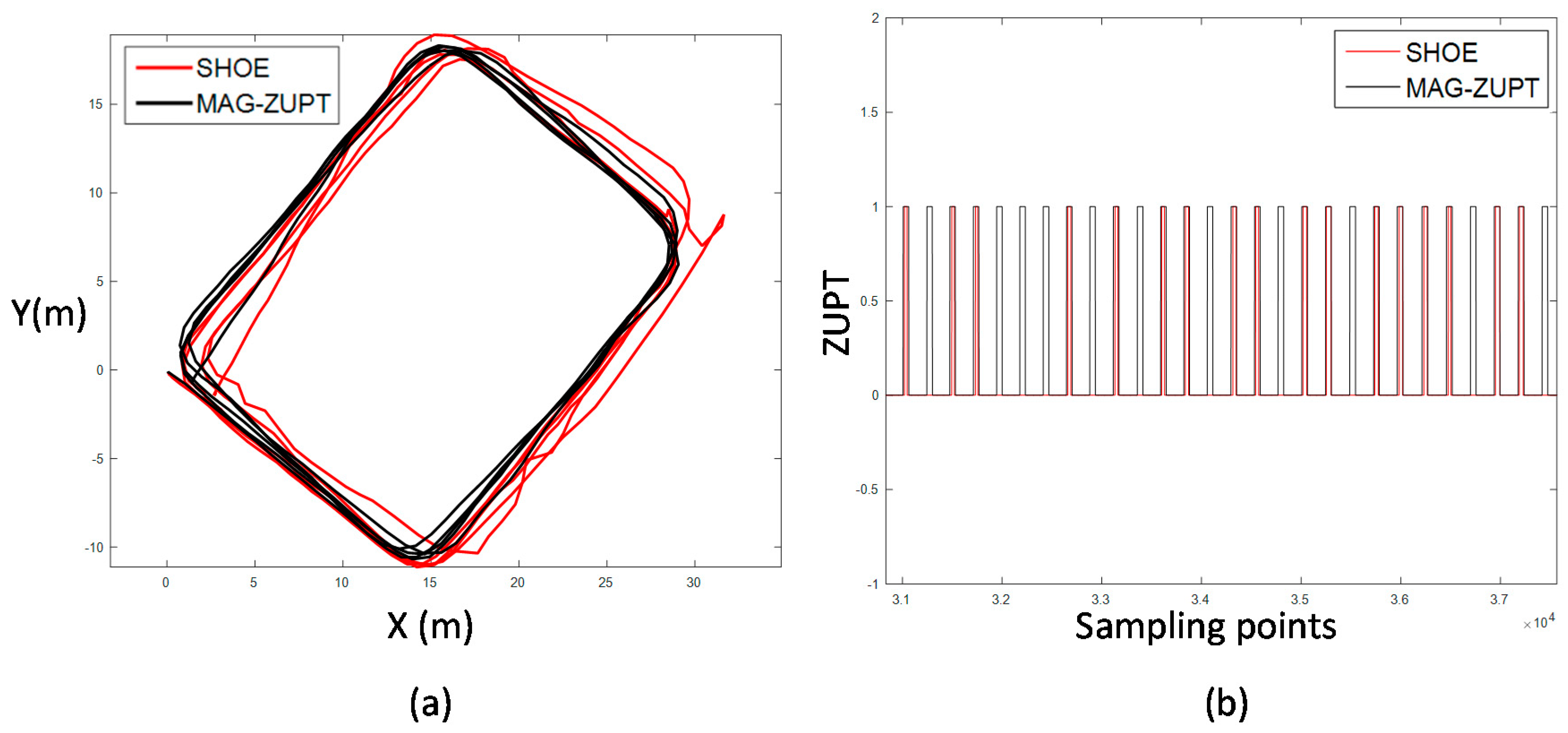
Figure 30.
Positioning and ZUPT result of traditional ZUPT and mag-ZUPT of Traj_3; (a) is the positioning result. The trajectory of mag-ZUPT is more matched to the true trajectory; (b) is ZUPT information. Mag-ZUPT based stance phase estimation has a better performance. TTDE of this test is 0.39%.
Figure 30.
Positioning and ZUPT result of traditional ZUPT and mag-ZUPT of Traj_3; (a) is the positioning result. The trajectory of mag-ZUPT is more matched to the true trajectory; (b) is ZUPT information. Mag-ZUPT based stance phase estimation has a better performance. TTDE of this test is 0.39%.
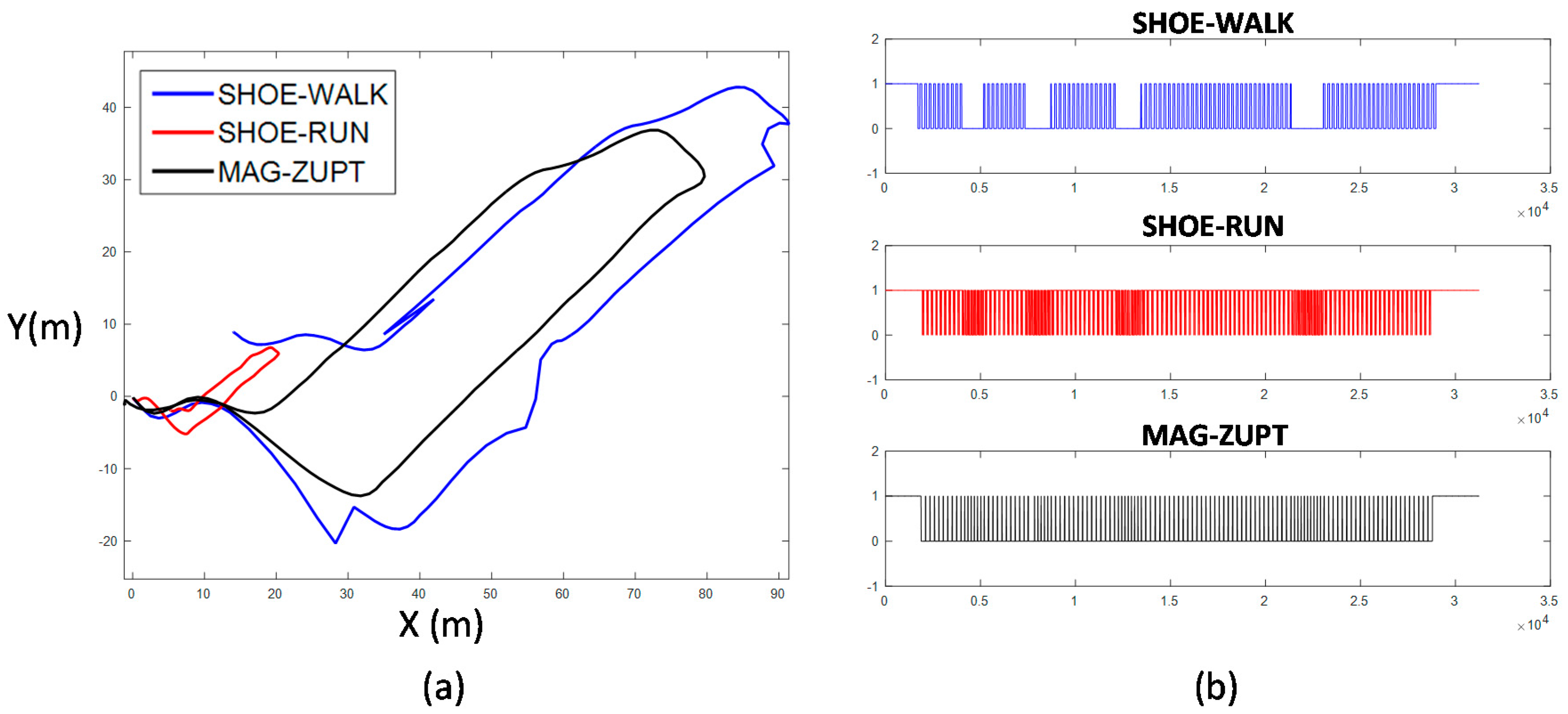
Figure 31.
Positioning results and ZUPT comparison of Traj_4; (a) is the positioning result. Blue line and red line are the results of SHOE-ZUPT method whose threshold is adjusted to walking and running, respectively. Black line is the result of the novel mag-ZUPT method developed in this paper; (b) is the ZUPT result of SHOE-WALK, SHOE-RUN and mag-ZUPT. TTDE of mag-ZUPT is 0.77%.
Figure 31.
Positioning results and ZUPT comparison of Traj_4; (a) is the positioning result. Blue line and red line are the results of SHOE-ZUPT method whose threshold is adjusted to walking and running, respectively. Black line is the result of the novel mag-ZUPT method developed in this paper; (b) is the ZUPT result of SHOE-WALK, SHOE-RUN and mag-ZUPT. TTDE of mag-ZUPT is 0.77%.
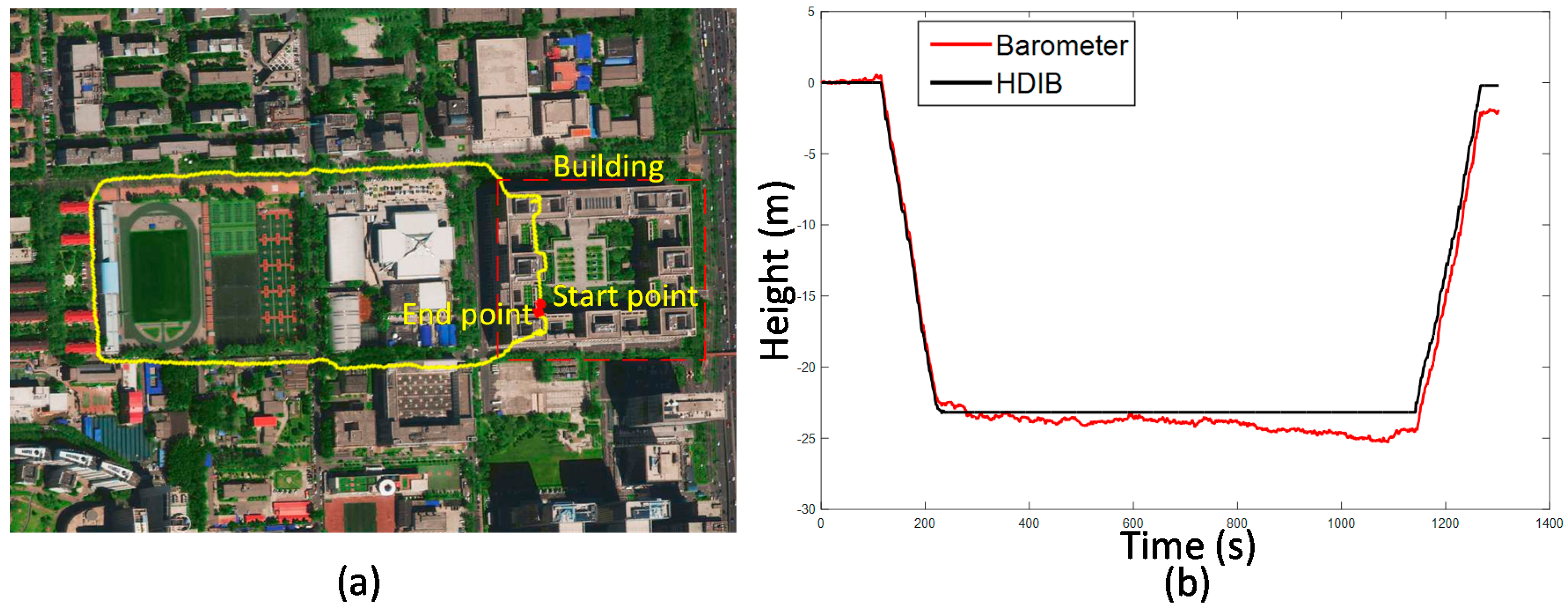
Figure 32.
Positioning result of Traj_5 overlaid on a satellite campus picture; (a) is the top view; (b) is height estimation result. TTDE of this test is 0.63% and the height error is 0.20 m.
Figure 32.
Positioning result of Traj_5 overlaid on a satellite campus picture; (a) is the top view; (b) is height estimation result. TTDE of this test is 0.63% and the height error is 0.20 m.
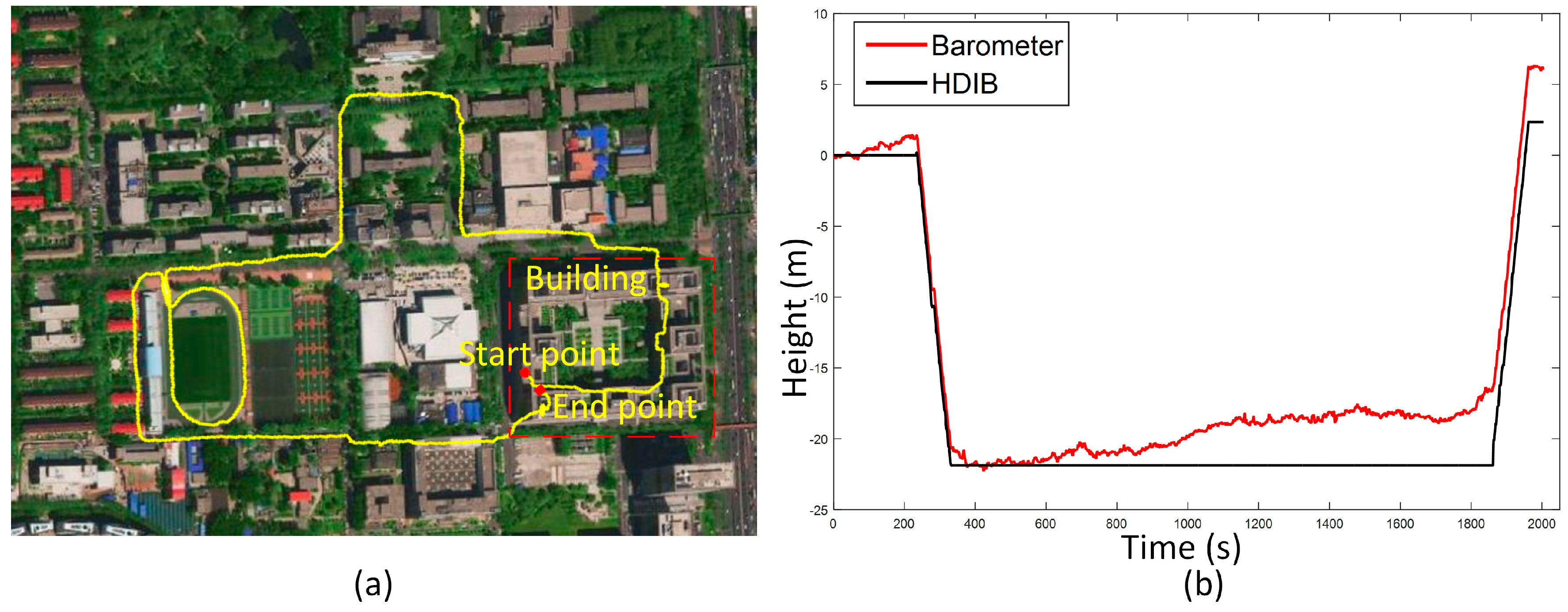
Figure 33.
Positioning result of Traj_6 overlaid on a satellite campus picture; (a) is the top view; (b) is height estimation result. TTDE of this test is 1.04% and the height error is 2.35 m.
Figure 33.
Positioning result of Traj_6 overlaid on a satellite campus picture; (a) is the top view; (b) is height estimation result. TTDE of this test is 1.04% and the height error is 2.35 m.
Table 1.
Statistics of peak-peak time period of walking and running gait patterns.
Table 1.
Statistics of peak-peak time period of walking and running gait patterns.
| Items | Peak-Peak Period of Walking | Peak-Peak Period of Running |
|---|
| Maximum | 277 | 156 |
| Minimum | 242 | 141 |
| Average | 259.4 | 148.1 |
Table 2.
Height estimation result of MEMS-IMU, Barometer and HDIB.
Table 2.
Height estimation result of MEMS-IMU, Barometer and HDIB.
| Method | Start & End (m) | Peak (m) | Final Height (m) | Height Error (m) |
|---|
| MEMS-IMU | 0 | 24 | 51.72 | 51.72 |
| Barometer | 0 | 24 | 5.98 | 5.98 |
| HDIB | 0 | 24 | 2.04 | 2.04 |
Table 3.
Typical total travelled distance results.
Table 3.
Typical total travelled distance results.
| Average Window Length | Total Travelled Distance (m) |
|---|
| Real length | 1355 |
| 1 | 1612 |
| 100 | 1394 |
| 200 | 1353 |
| 300 | 1342 |
| 400 | 1332 |
| ZUPT-AAWL | 1356 |
Table 4.
Stance phase estimation accuracy of SHOE and mag-ZUPT.
Table 4.
Stance phase estimation accuracy of SHOE and mag-ZUPT.
| Trajectory | Stance Phase Number | Stance Phase Number of SHOE | Stance Phase Number of Mag-ZUPT |
|---|
| Walking_1 | 70 | 69 | 70 |
| Walking_2 | 68 | 69 | 68 |
| Walking_3 | 67 | 66 | 67 |
| Running_1 | 39 | 14 | 39 |
| Running_2 | 38 | 14 | 37 |
| Running_3 | 37 | 4 | 36 |
| Mix_1 | 45 | 34 | 45 |
| Mix_2 | 45 | 32 | 44 |
| Mix_3 | 44 | 28 | 44 |
| Average error | None | 13.9/50.3 | 0.3/50.3 |
Table 5.
Total travelled distance of SHOE and mag-ZUPT.
Table 5.
Total travelled distance of SHOE and mag-ZUPT.
| Trajectory | Actual Moving Length | Moving Length of SHOE | Moving Length of Mag-ZUPT |
|---|
| Walking_1 | 100 | 94.8 | 98.5 |
| Walking_2 | 100 | 95.6 | 98.6 |
| Walking_3 | 100 | 94.4 | 97.2 |
| Running_1 | 100 | 176.9 | 96.6 |
| Running_2 | 100 | 185.9 | 98.2 |
| Running_3 | 100 | 686.4 | 104.7 |
| Mix_1 | 100 | 104.8 | 102.1 |
| Mix_2 | 100 | 153.8 | 98.1 |
| Mix_3 | 100 | 180.5 | 101.5 |
| Average error | None | 100.4/100 | 2.3/100 |
Table 6.
Description of the test trajectories.
Table 6.
Description of the test trajectories.
| Trajectory | Height Change Description |
|---|
| Height_1 | Walking on the level ground for 396 m, the height change is 0 m. |
| Height_2 | Walking on the level ground for 408 m, the height change is 0 m. |
| Height_3 | Height of each floor is 3.55 m, ascending 4 floors, descending 5 floors, ascending 1 floor |
| Height_4 | Height of each floor is 3.55 m, ascending 4 floors, descending 5 floors, ascending 1 floor |
| Height_5 | Height of each floor is 3.55 m, descending 1 floor and ascending 1 floor |
| Height_6 | Walking from floor 2 to floor 11, height from floor 2 to 7 is 4.108 m, height from floor 7 to floor 11 is 3.792 m |
Table 7.
RMS results of IMU based height estimation, barometer based height estimation and HDIB based height estimation.
Table 7.
RMS results of IMU based height estimation, barometer based height estimation and HDIB based height estimation.
| Trajectory | Total Height Change (m) | IMU Height Error RMS (m) | Barometer Height Error RMS (m) | HDIB Height Error RMS (m) |
|---|
| Height_1 | 0 | 14.15 | 0.19 | 0 |
| Height_2 | 0 | 22.07 | 1.18 | 0 |
| Height_3 | 35.5 | 10.29 | 1.31 | 0.26 |
| Height_4 | 35.5 | 4.28 | 1.78 | 0.69 |
| Height_5 | 7.1 | 0.80 | 0.96 | 0.27 |
| Height_6 | 35.7 | 16.94 | 1.07 | 0.30 |
Table 8.
Key indicators of the six experiments.
Table 8.
Key indicators of the six experiments.
| Trajectory | Total Moving Distance (m) | Height Error (m) | TTDE |
|---|
| Traj_1 | 261 | 0.68 | 0.32% |
| Traj_2 | 368 | 0.27 | 0.76% |
| Traj_3 | 409 | 0 | 0.39% |
| Traj_4 | 202 | 0 | 0.77% |
| Traj_5 | 1430 | 0.20 | 0.63% |
| Traj_6 | 2696 | 2.35 | 1.04% |



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}