Adaptive Residual Interpolation for Color and Multispectral Image Demosaicking †


Abstract
:1. Introduction
2. Related Works
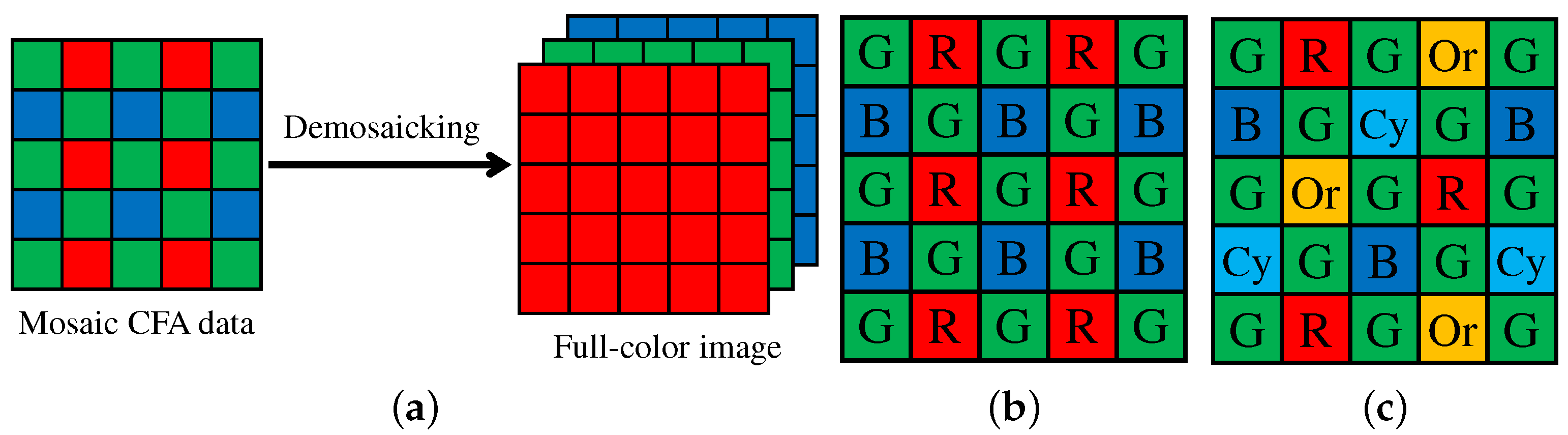
2.1. Bayer Demosaicking Algorithms
2.2. Multispectral Demosaicking Algorithms
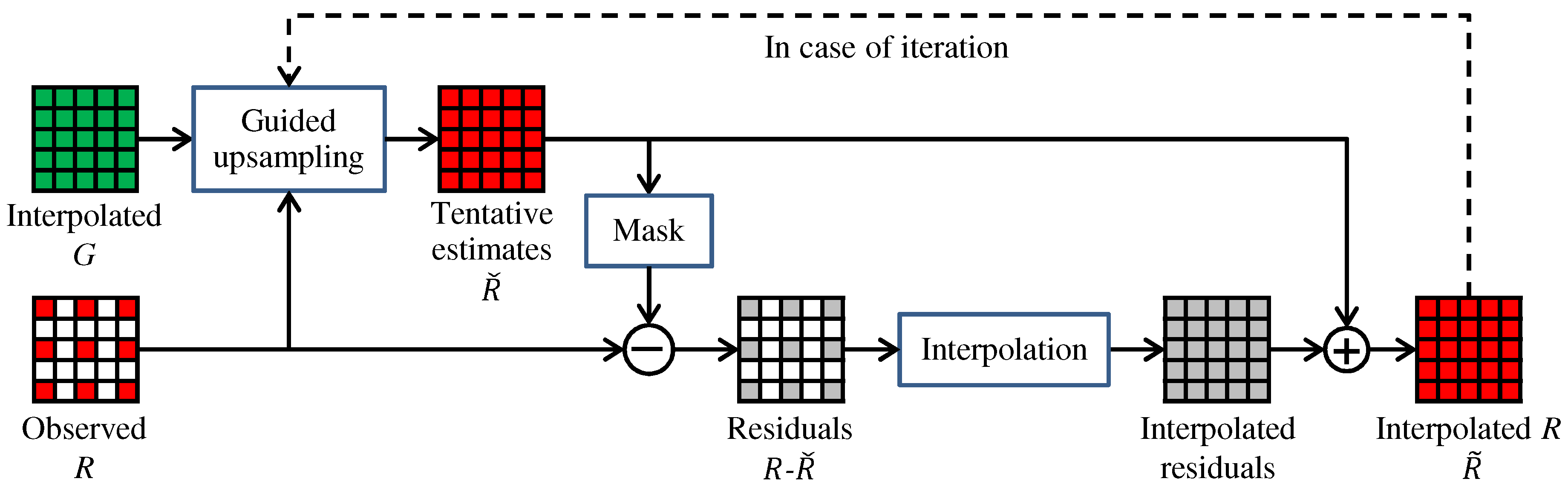
3. Residual Interpolation Framework
3.1. General Processing Flow
3.2. Original RI
3.3. Minimized-Laplacian RI
3.4. Iterative RI
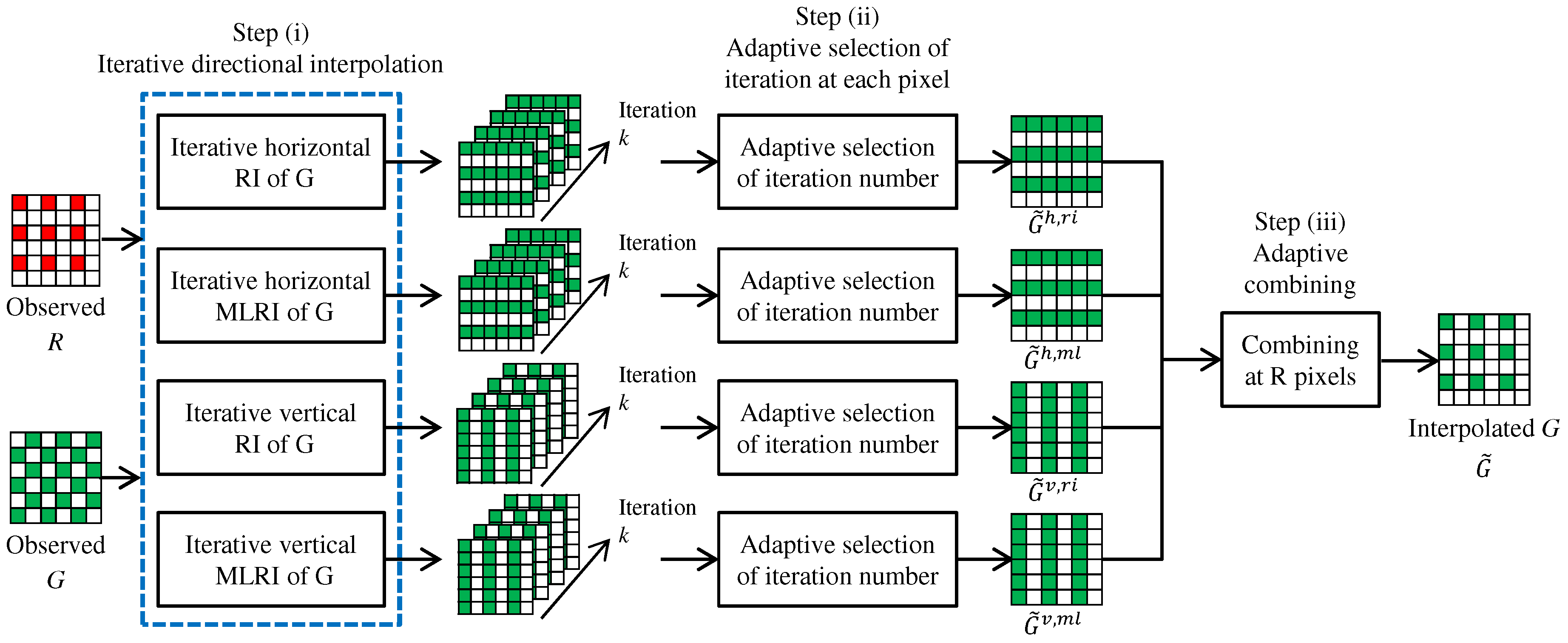
4. Proposed Bayer Demosaicking Algorithm
4.1. Interpolation of the G Band
4.2. Interpolation of the R and B Bands
4.3. Window Size of GF
5. Multispectral Extension
6. Experimental Results
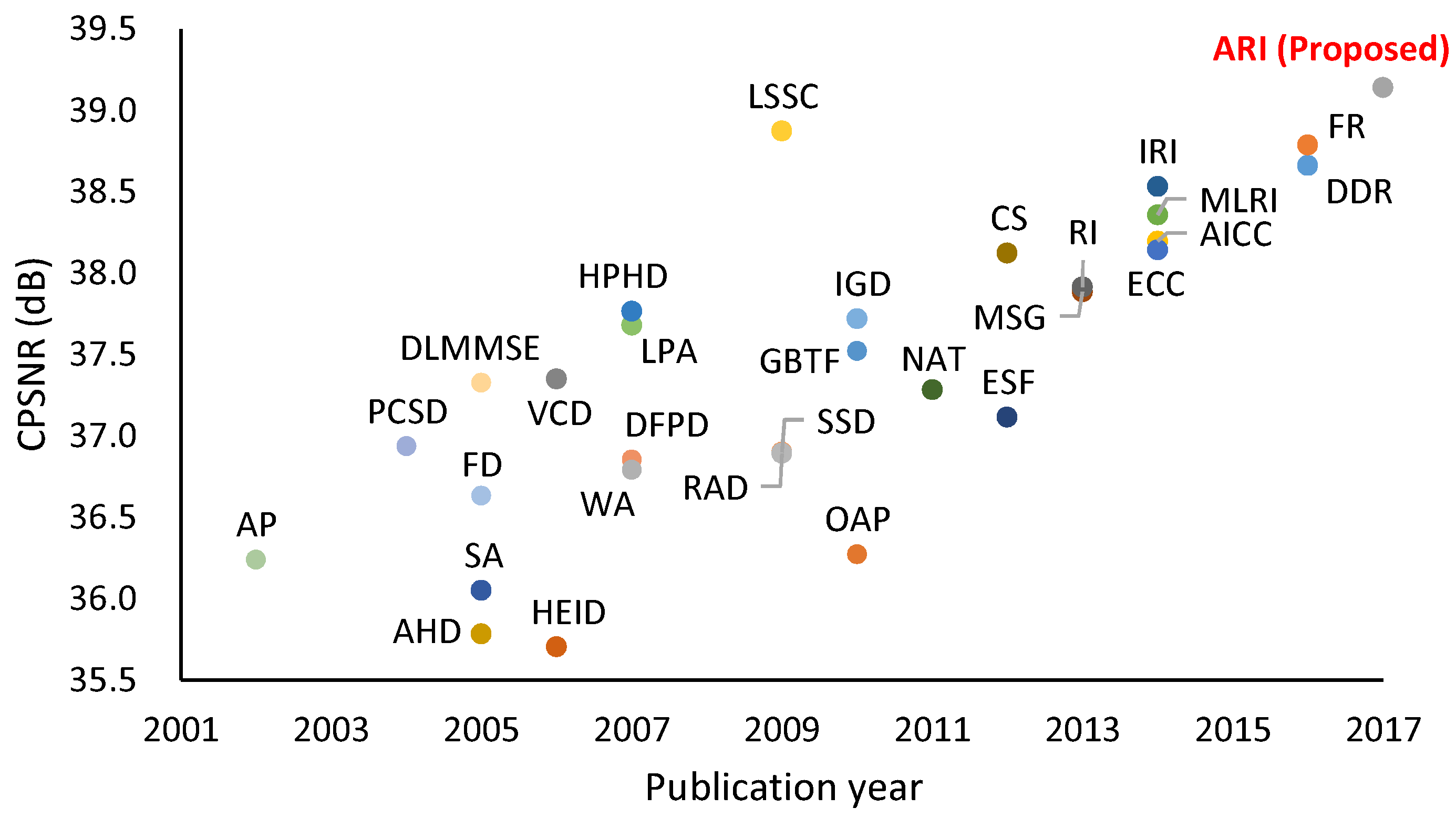
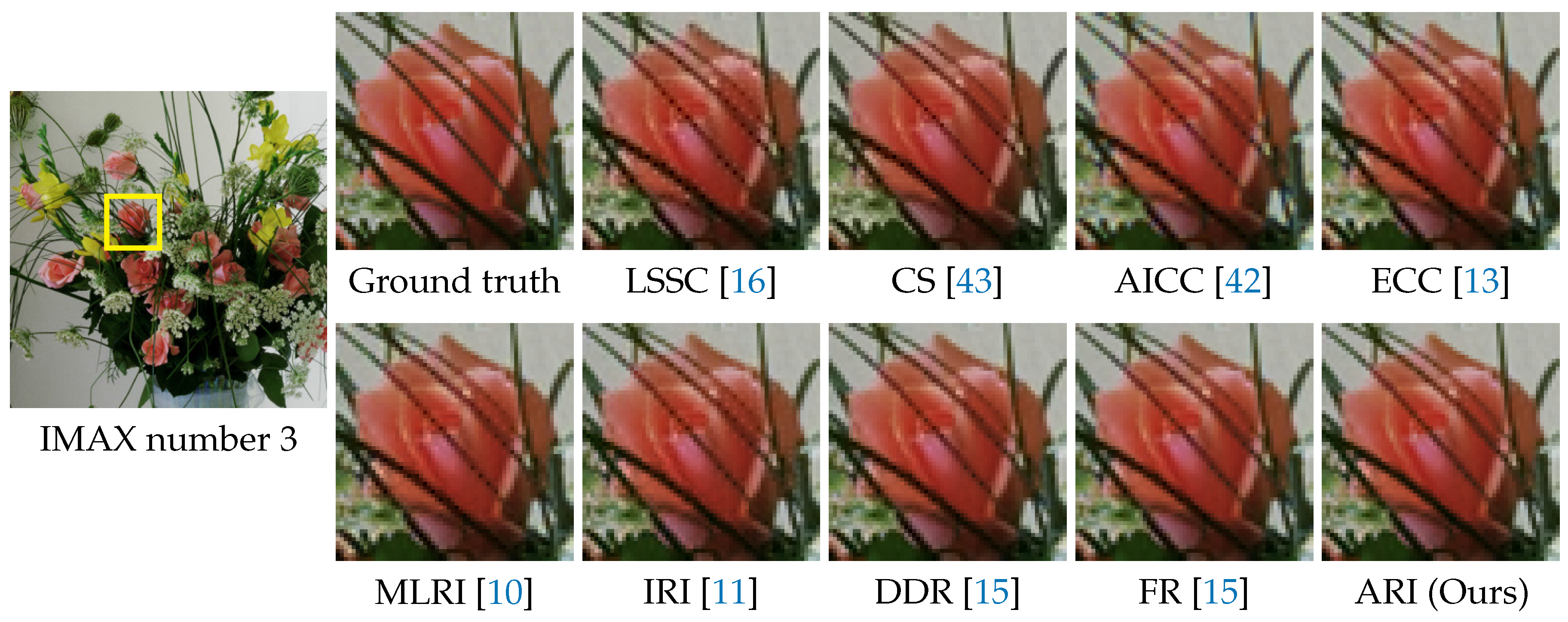
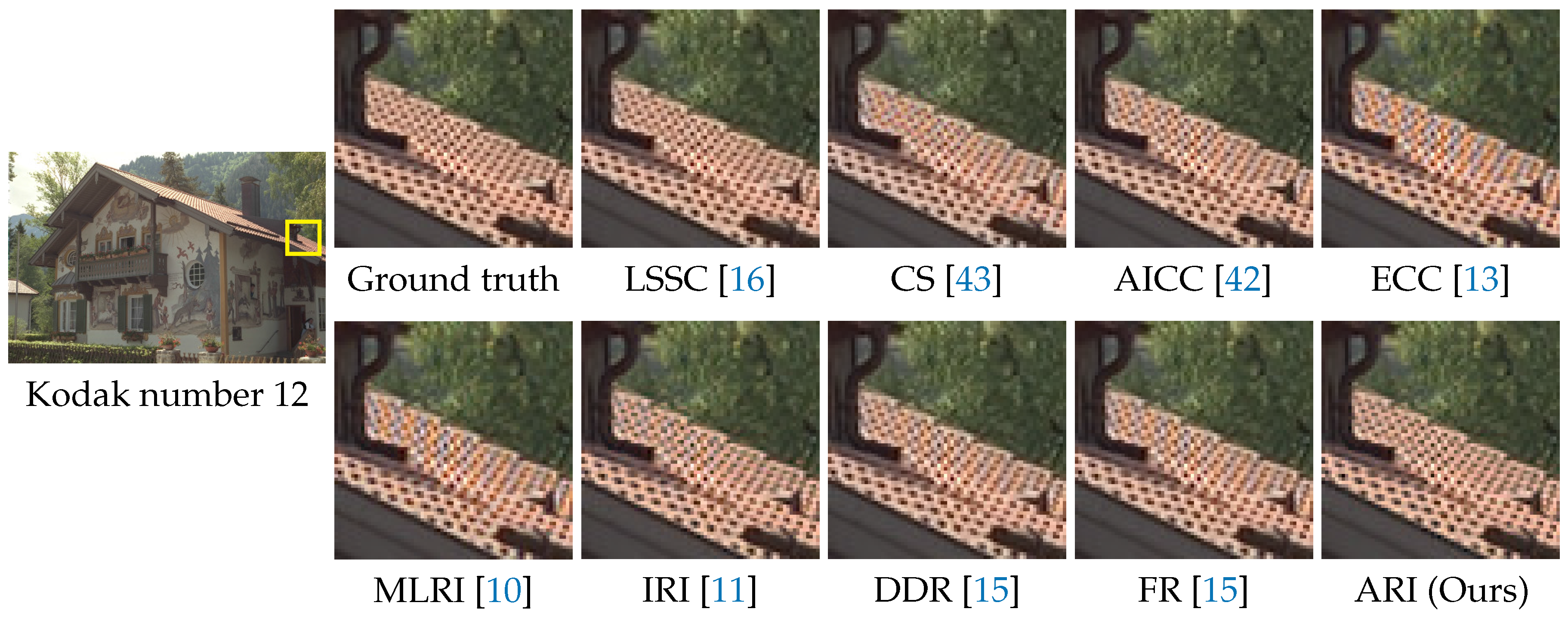
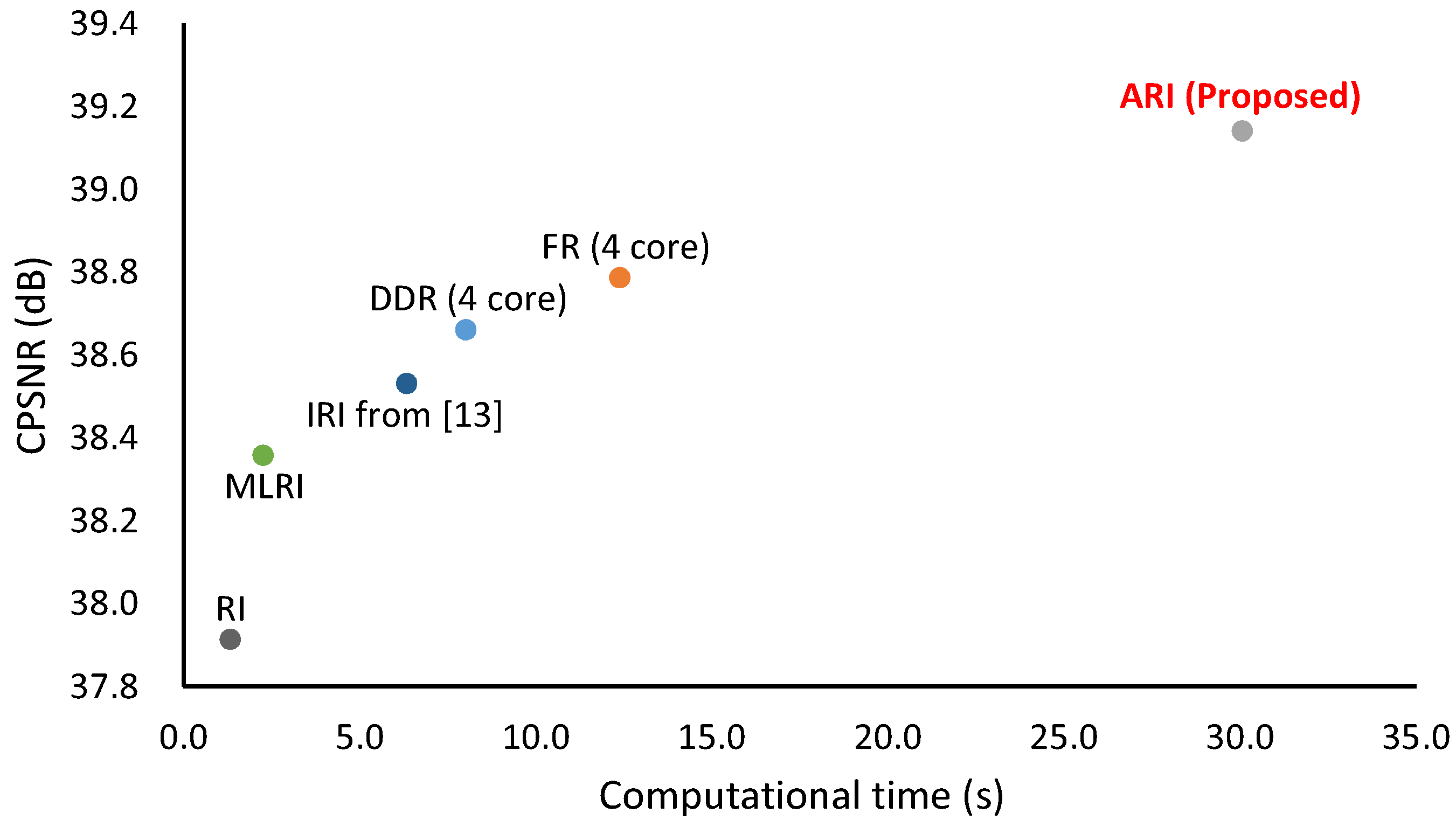
6.1. Performance of Bayer Demosaicking Algorithms
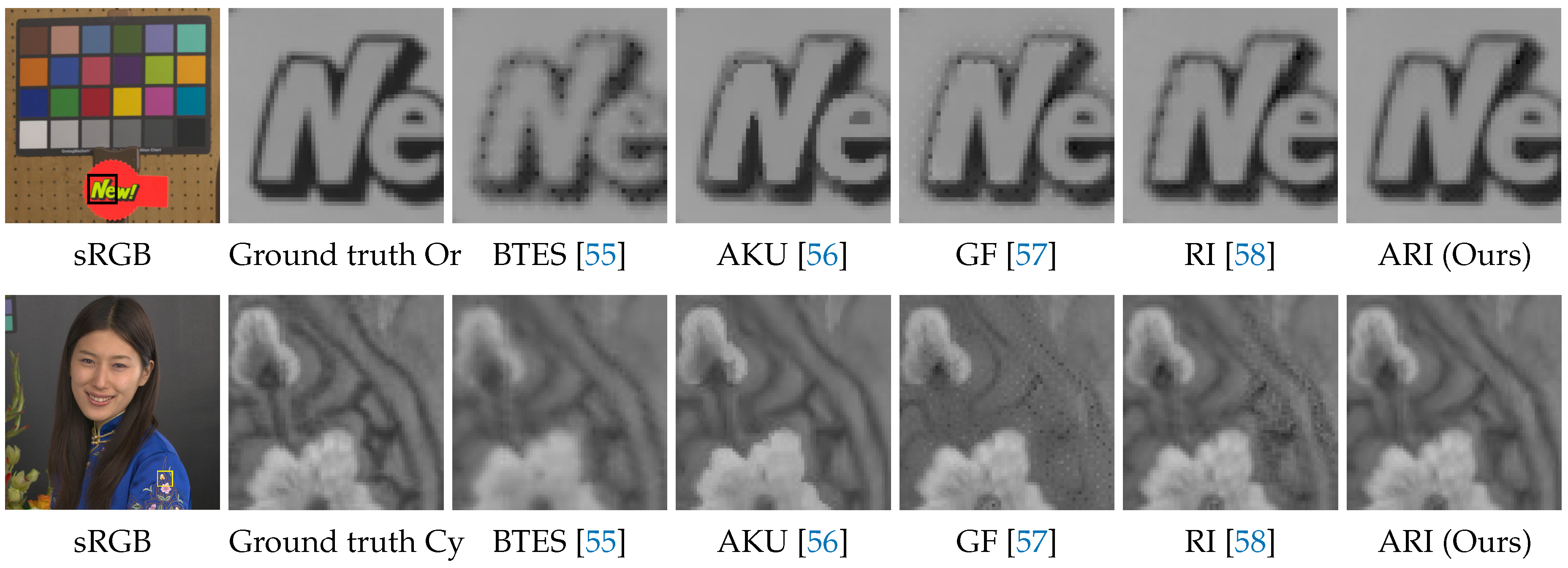
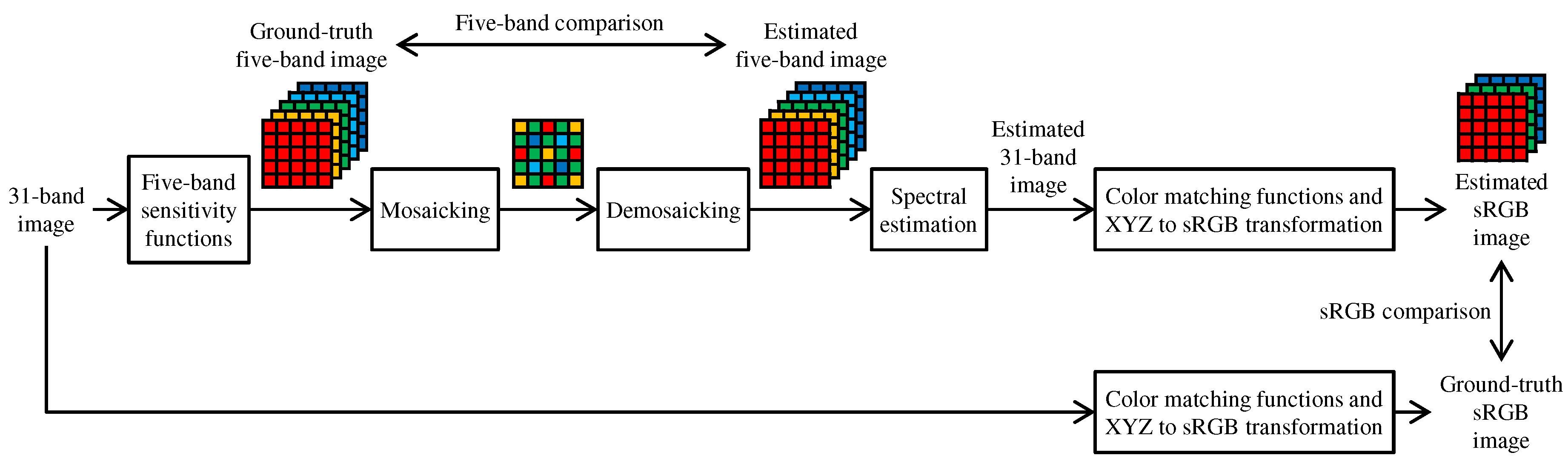
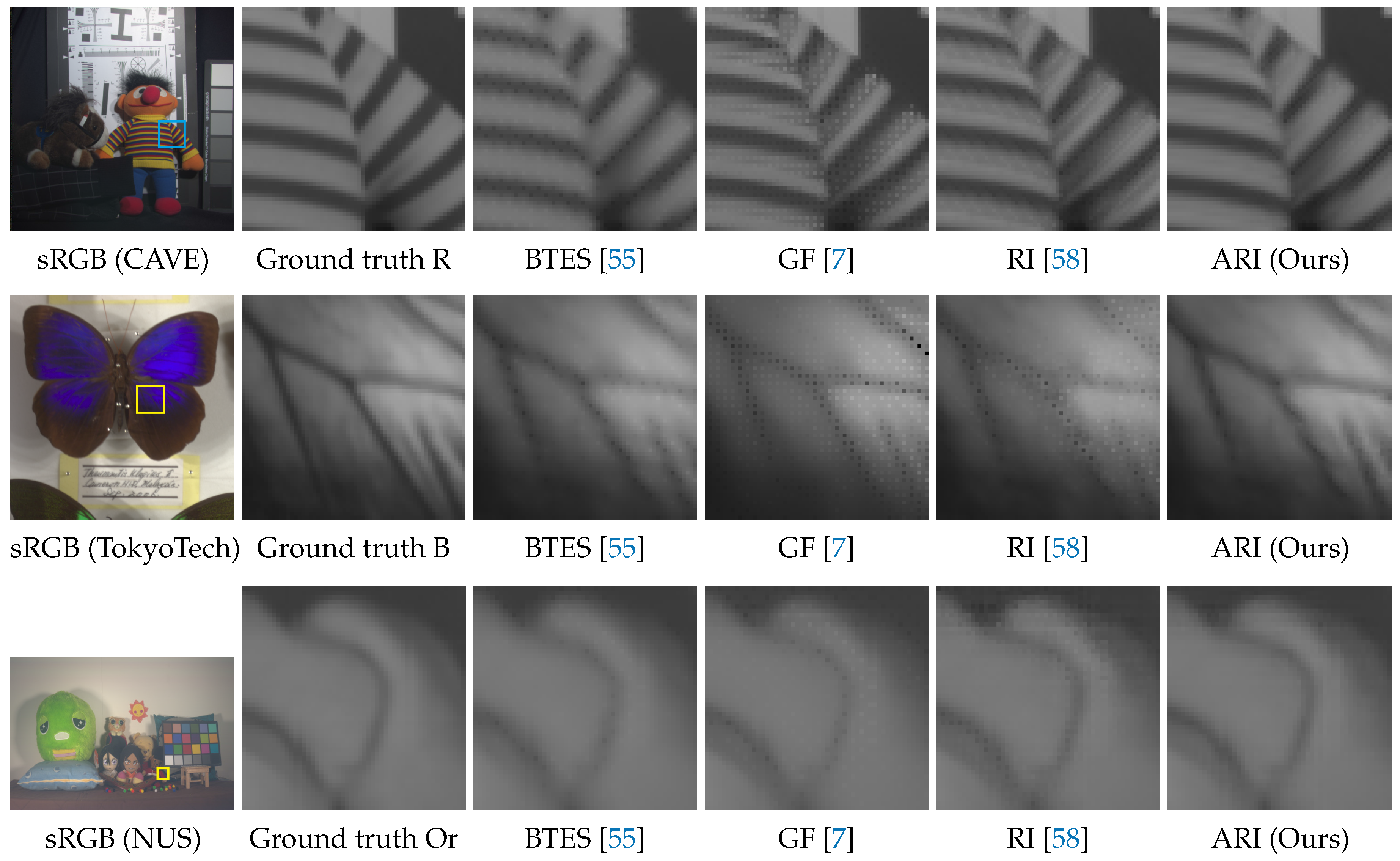
6.2. Performance of Multispectral Demosaicking Algorithms
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lukac, R. Single-Sensor Imaging: Methods and Applications for Digital Cameras; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Ramanath, R.; Snyder, W.E.; Bilbro, G.L. Demosaicking methods for Bayer color arrays. J. Electron. Imaging 2002, 11, 306–315. [Google Scholar] [CrossRef]
- Gunturk, B.K.; Glotzbach, J.; Altunbasak, Y.; Schafer, R.W.; Mersereau, R.M. Demosaicking: Color filter array interpolation. IEEE Signal Process. Mag. 2005, 22, 44–54. [Google Scholar] [CrossRef]
- Li, X.; Gunturk, B.K.; Zhang, L. Image demosaicing: A systematic survey. In Proceedings of the SPIE, San Jose, CA, USA, 28 January 2008; Volume 6822, p. 68221J. [Google Scholar]
- Menon, D.; Calvagno, G. Color image demosaicking: An overview. Signal Process. Image Commun. 2011, 26, 518–533. [Google Scholar] [CrossRef]
- Bayer, B. Color Imaging Array. U.S. Patent 3971065, 20 July 1976. [Google Scholar]
- Monno, Y.; Kikuchi, S.; Tanaka, M.; Okutomi, M. A practical one-shot multispectral imaging system using a single image sensor. IEEE Trans. Image Process. 2015, 24, 3048–3059. [Google Scholar] [CrossRef] [PubMed]
- Kiku, D.; Monno, Y.; Tanaka, M.; Okutomi, M. Residual interpolation for color image demosaicking. In Proceedings of the 2013 20th IEEE International Conference on Image Processing (ICIP), Melbourne, VIC, Australia, 15–18 September 2013; pp. 2304–2308. [Google Scholar]
- Kiku, D.; Monno, Y.; Tanaka, M.; Okutomi, M. Minimized-Laplacian residual interpolation for color image demosaicking. In Proceedings of the SPIE, San Francisco, CA, USA, 7 March 2014; p. 90230L. [Google Scholar]
- Kiku, D.; Monno, Y.; Tanaka, M.; Okutomi, M. Beyond color difference: Residual interpolation for color image demosaicking. IEEE Trans. Image Process. 2016, 25, 1288–1300. [Google Scholar] [CrossRef] [PubMed]
- Ye, W.; Ma, K.K. Image demosaicing by using iterative residual interpolation. In Proceedings of the 2014 IEEE International Conference on Image Processing (ICIP), Paris, France, 27–30 October 2014; pp. 1862–1866. [Google Scholar]
- Ye, W.; Ma, K.K. Color image demosaicing by using iterative residual interpolation. IEEE Trans. Image Process. 2015, 24, 5879–5891. [Google Scholar] [CrossRef] [PubMed]
- Jaiswal, S.P.; Au, O.C.; Jakhetiya, V.; Yuan, Y.; Yang, H. Exploitation of inter-color correlation for color image demosaicking. In Proceedings of the 2014 IEEE International Conference on Image Processing (ICIP), Paris, France, 27–30 October 2014; pp. 1812–1816. [Google Scholar]
- Wu, J.; Timofte, R.; Gool, L.V. Efficient regression priors for post-processing demosaiced images. In Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 3495–3499. [Google Scholar]
- Wu, J.; Timofte, R.; Gool, L.V. Demosaicing based on directional difference regression and efficient regression priors. IEEE Trans. Image Process. 2016, 25, 3862–3874. [Google Scholar] [CrossRef] [PubMed]
- Mairal, J.; Bach, F.; Ponce, J.; Sapiro, G.; Zisserman, A. Non-local sparse models for image restoration. In Proceedings of the 2009 IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 Ocober 2009; pp. 2272–2279. [Google Scholar]
- Lapray, P.J.; Wang, X.; Thomas, J.B.; Gouton, P. Multispectral filter arrays: Recent advances and practical implementation. Sensors 2014, 14, 21626–21659. [Google Scholar] [CrossRef] [PubMed]
- Monno, Y.; Kiku, D.; Tanaka, M.; Okutomi, M. Adaptive residual interpolation for color image demosaicking. In Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 3861–3865. [Google Scholar]
- Bai, C.; Li, J.; Lin, Z.; Yu, J.; Chen, Y.W. Penrose demosaicking. IEEE Trans. Image Process. 2015, 24, 1672–1684. [Google Scholar] [PubMed]
- Cok, D. Signal Processing Method and Apparatus for Producing Interpolated Chrominance Values in a Sampled Color Image Signal. U.S. Patent 4642678, 10 Febrary 1987. [Google Scholar]
- Kimmel, R. Demosaicing: Image reconstruction from color CCD samples. IEEE Trans. Image Process. 1999, 8, 1221–1228. [Google Scholar] [CrossRef] [PubMed]
- Lukac, R.; Plataniotis, K.N. Normalized color-ratio modeling for CFA interpolation. IEEE Trans. Consum. Electron. 2004, 50, 737–745. [Google Scholar] [CrossRef]
- Hibbard, R. Apparatus and Method for Adaptively Interpolating a Full Color Image Utilizing Luminance Gradients. U.S. Patent 5382976, 17 Janurary 1995. [Google Scholar]
- Hamilton, J.; Adams, J. Adaptive Color Plan Interpolation in Single Sensor Color Electronic Camera. U.S. Patent 5629734, 13 May 1997. [Google Scholar]
- Li, X. Demosaicing by successive approximation. IEEE Trans. Image Process. 2005, 14, 370–379. [Google Scholar] [PubMed]
- Wu, X.; Zhang, N. Primary-consistent soft-decision color demosaicking for digital cameras. IEEE Trans. Image Process. 2004, 13, 1263–1274. [Google Scholar] [CrossRef] [PubMed]
- Hirakawa, K.; Parks, T.W. Adaptive homogeneity-directed demosaicking algorithm. IEEE Trans. Image Process. 2005, 14, 360–369. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Wu, X. Color demosaicking via directional linear minimum mean square-error estimation. IEEE Trans. Image Process. 2005, 14, 2167–2178. [Google Scholar] [CrossRef] [PubMed]
- Chung, K.H.; Chan, Y.H. Color demosaicing using variance of color differences. IEEE Trans. Image Process. 2006, 15, 2944–2955. [Google Scholar] [CrossRef] [PubMed]
- Menon, D.; Andriani, S.; Calvagno, G. Demosaicing with directional filtering and a posteriori decision. IEEE Trans. Image Process. 2007, 16, 132–141. [Google Scholar] [CrossRef] [PubMed]
- Tsai, C.Y.; Song, K.T. Heterogeneity-projection hard-decision color interpolation using spectral-spatial correlation. IEEE Trans. Image Process. 2007, 16, 78–91. [Google Scholar] [CrossRef] [PubMed]
- Paliy, D.; Katkovnik, V.; Bilcu, R.; Alenius, S.; Egiazarian, K. Spatially adaptive color filter array interpolation for noiseless and noisy data. Int. J. Imaging Syst. Technol. 2007, 17, 105–122. [Google Scholar] [CrossRef]
- Chung, K.H.; Chan, Y.H. Low-complexity color demosaicing algorithm based on integrated gradients. J. Electron. Imaging 2010, 19, 021104. [Google Scholar] [CrossRef]
- Pekkucuksen, I.; Altunbasak, Y. Gradient based threshold free color filter array interpolation. In Proceedings of the 2010 17th IEEE International Conference on Image Processing (ICIP), Hong Kong, China, 26–29 September 2010; pp. 137–140. [Google Scholar]
- Pekkucuksen, I.; Altunbasak, Y. Multiscale gradients-based color filter array interpolation. IEEE Trans. Image Process. 2013, 22, 157–165. [Google Scholar] [CrossRef] [PubMed]
- Su, C.Y. Highly effective iterative demosaicing using weighted-edge and color-difference interpolations. IEEE Trans. Consum. Electron. 2006, 52, 639–645. [Google Scholar]
- Pekkucuksen, I.; Altunbasak, Y. Edge strength filter based color filter array interpolation. IEEE Trans. Image Process. 2012, 21, 393–397. [Google Scholar] [CrossRef] [PubMed]
- Buades, A.; Coll, B.; Morel, J.M.; Sbert, C. Self-similarity driven color demosaicking. IEEE Trans. Image Process. 2009, 18, 1192–1202. [Google Scholar] [CrossRef] [PubMed]
- Buades, A.; Coll, B.; Morel, J.M.; Sbert, C. Self-similarity driven demosaicking. Image Process. Line 2011, 1, 1–6. [Google Scholar] [CrossRef]
- Zhang, L.; Wu, X.; Buades, A.; Li, X. Color demosaicking by local directional interpolation and nonlocal adaptive thresholding. J. Electron. Imaging 2011, 20, 023016. [Google Scholar]
- Duran, J.; Buades, A. Self-similarity and spectral correlation adaptive algorithm for color demosaicking. IEEE Trans. Image Process. 2014, 23, 4031–4040. [Google Scholar] [CrossRef] [PubMed]
- Duran, J.; Buades, A. A demosaicking algorithm with adaptive inter-channel correlation. Image Process. Line 2015, 5, 311–327. [Google Scholar] [CrossRef]
- Getreuer, P. Image demosaicking with contour stencils. Image Process. Line 2012, 2, 22–34. [Google Scholar] [CrossRef]
- Kim, Y.; Jeong, J. Four-direction residual interpolation for demosaicking. IEEE Trans. Circuits Syst. Video Technol. 2016, 26, 881–890. [Google Scholar] [CrossRef]
- Dubois, E. Frequency-domain methods for demosaicking of Bayer-sampled color images. IEEE Signal Process. Lett. 2005, 12, 847–850. [Google Scholar] [CrossRef]
- Alleysson, D.; Süsstrunk, S.; Hérault, J. Linear demosaicking inspired by the human visual system. IEEE Trans. Image Process. 2005, 14, 439–449. [Google Scholar] [PubMed]
- Lian, N.X.; Chang, L.; Tan, Y.P.; Zagorodnov, V. Adaptive filtering for color filter array demosaicking. IEEE Trans. Image Process. 2007, 16, 2515–2525. [Google Scholar] [CrossRef] [PubMed]
- Leung, B.; Jeon, G.; Dubois, E. Least-squares luma–chroma demultiplexing algorithm for Bayer demosaicking. IEEE Trans. Image Process. 2011, 20, 1885–1894. [Google Scholar] [CrossRef] [PubMed]
- Gunturk, B.K.; Altunbasak, Y.; Mersereau, R.M. Color plane interpolation using alternating projections. IEEE Trans. Image Process. 2002, 11, 997–1013. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.M.; Karzand, M.; Vetterli, M. Demosaicking by alternating projections: Theory and fast one-step implementation. IEEE Trans. Image Process. 2010, 19, 2085–2098. [Google Scholar] [CrossRef] [PubMed]
- Menon, D.; Calvagno, G. Demosaicing based on wavelet analysis of the luminance component. In Proceedings of the IEEE International Conference on Image Processing, ICIP 2007, San Antonio, TX, USA, 16 September–19 October 2007; pp. 181–184. [Google Scholar]
- Menon, D.; Calvagno, G. Regularization approaches to demosaickingn. IEEE Trans. Image Process. 2009, 18, 2209–2220. [Google Scholar] [CrossRef] [PubMed]
- Moghadam, A.A.; Aghagolzadeh, M.; Kumar, M.; Radha, H. Compressive framework for demosaicing of natural images. IEEE Trans. Image Process. 2013, 22, 2356–2371. [Google Scholar] [CrossRef] [PubMed]
- Miao, L.; Qi, H. The design and evaluation of a generic method for generating mosaicked multispectral filter arrays. IEEE Trans. Image Process. 2006, 15, 2780–2791. [Google Scholar] [CrossRef] [PubMed]
- Miao, L.; Qi, H.; Ramanath, R.; Snyder, W.E. Binary tree-based generic demosaicking algorithm for multispectral filter arrays. IEEE Trans. Image Process. 2006, 15, 3550–3558. [Google Scholar] [CrossRef] [PubMed]
- Monno, Y.; Tanaka, M.; Okutomi, M. Multispectral demosaicking using adaptive kernel upsampling. In Proceedings of the 2011 18th IEEE International Conference on Image Processing (ICIP), Brussels, Belgium, 11–14 September 2011; pp. 3218–3221. [Google Scholar]
- Monno, Y.; Tanaka, M.; Okutomi, M. Multispectral demosaicking using guided filter. In Proceedings of the Volume 8299, Digital Photography VIII, Burlingame, CA, USA, 24 January 2012; p. 82990O. [Google Scholar]
- Monno, Y.; Kiku, D.; Kikuchi, S.; Tanaka, M.; Okutomi, M. Multispectral demosaicking with novel guide image generation and residual interpolation. In Proceedings of the 2014 IEEE International Conference on Image Processing (ICIP), Paris, France, 29 January 2015; pp. 645–649. [Google Scholar]
- Jaiswal, S.P.; Fang, L.; Jakhetiya, V.; Kuse, M.; Au, O.C. Optimized high-frequency based interpolation for multispectral demosaicking. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 2851–2855. [Google Scholar]
- Jaiswal, S.P.; Fang, L.; Jakhetiya, V.; Pang, J.; Mueller, K.; Au, O.C. Adaptive multispectral demosaicking based on frequency-domain analysis of spectral correlation. IEEE Trans. Image Process. 2017, 26, 953–968. [Google Scholar] [CrossRef] [PubMed]
- He, K.; Sun, J.; Tang, X. Guided image filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1397–1409. [Google Scholar] [CrossRef] [PubMed]
- Amba, P.; Thomas, J.B.; Alleysson, D. N-LMMSE demosaicing for spectral filter arrays. J. Imaging Sci. Technol. 2017, 61, 40407-1–40407-11. [Google Scholar] [CrossRef]
- Mihoubi, S.; Losson, O.; Mathon, B.; Macaire, L. Multispectral demosaicing using pseudo-panchromatic image. IEEE Trans. Comput. Imaging 2017, 3, 982–994. [Google Scholar] [CrossRef]
- Shinoda, K.; Hamasaki, T.; Hasegawa, M.; Kato, S.; Ortega, A. Quality metric for filter arrangement in a multispectral filter array. In Proceedings of the Picture Coding Symposium (PCS), San Jose, CA, USA, 8–11 December 2013; pp. 149–152. [Google Scholar]
- Aggarwal, H.K.; Majumdar, A. Single-sensor multi-spectral image demosaicing algorithm using learned interpolation weights. In Proceedings of the 2014 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014; pp. 2011–2014. [Google Scholar]
- Yasuma, F.; Mitsunaga, T.; Iso, D.; Nayar, S.K. Generalized assorted pixel camera: Postcapture control of resolution, dynamic range, and spectrum. IEEE Trans. Image Process. 2010, 19, 2241–2253. [Google Scholar] [CrossRef] [PubMed]
- Jia, J.; Hirakawa, K. Single-shot Fourier transform multispectroscopy. In Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 4205–4209. [Google Scholar]
- Jia, J.; Ni, C.; Sarangan, A.; Hirakawa, K. Guided filter demosaicking for Fourier spectral filter array. In Electronic Imaging, Visual Information Processing and Communication VII; Society for Imaging Science and Technology: Washington, DC, USA; pp. 1–5.
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]
- Sharma, G.; Wu, W.; Dalal, E.N. The CIEDE2000 color-difference formula: Implementation notes, supplementary test data, and mathematical observations. Color Res. Appl. 2005, 30, 21–30. [Google Scholar] [CrossRef]
- Nguyen, R.M.H.; Prasad, D.K.; Brown, M.S. Training-based spectral reconstruction from a single RGB image. In Computer Vision (ECCV); Springer: Berlin, Germany, 2014; pp. 186–201. [Google Scholar]
- Hardeberg, J.Y.; Schmitt, F.; Brettel, H. Multispectral color image capture using a liquid crystal tunable filter. Opt. Eng. 2002, 41, 2532–2548. [Google Scholar]
- Park, J.; Lee, M.; Grossberg, M.D.; Nayar, S.K. Multispectral imaging using multiplexed illumination. In Proceedings of the IEEE 11th International Conference on Computer Vision, ICCV 2007, Rio de Janeiro, Brazil, 14–21 October 2007; pp. 1–8. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | IMAX | Kodak | IMAX + Kodak | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| R | G | B | CPSNR | R | G | B | CPSNR | R | G | B | CPSNR | |
| AP [49] | 32.91 | 35.15 | 32.37 | 33.27 | 39.99 | 43.24 | 39.69 | 40.69 | 35.74 | 38.39 | 35.30 | 36.24 |
| PCSD [26] | 34.61 | 38.10 | 33.44 | 34.90 | 39.61 | 41.62 | 39.13 | 39.98 | 36.61 | 39.51 | 35.72 | 36.94 |
| SA [25] | 32.73 | 34.73 | 32.10 | 32.98 | 39.99 | 43.37 | 39.55 | 40.65 | 35.63 | 38.18 | 35.08 | 36.05 |
| AHD [27] | 33.00 | 36.97 | 32.16 | 33.49 | 38.81 | 40.84 | 38.42 | 39.22 | 35.32 | 38.52 | 34.66 | 35.78 |
| DLMMSE [28] | 34.03 | 37.99 | 33.04 | 34.47 | 41.17 | 43.94 | 40.51 | 41.62 | 36.89 | 40.37 | 36.03 | 37.33 |
| FD [45] | 33.12 | 35.86 | 32.56 | 33.58 | 40.57 | 44.10 | 39.98 | 41.20 | 36.10 | 39.15 | 35.53 | 36.63 |
| HEID [36] | 31.63 | 34.40 | 31.26 | 32.16 | 40.44 | 43.73 | 39.88 | 41.02 | 35.16 | 38.13 | 34.71 | 35.70 |
| VCD [29] | 34.15 | 37.18 | 33.43 | 34.58 | 40.93 | 43.92 | 40.45 | 41.51 | 36.86 | 39.88 | 36.24 | 37.35 |
| LPA [32] | 34.36 | 37.88 | 33.30 | 34.72 | 41.66 | 44.46 | 41.00 | 42.12 | 37.28 | 40.51 | 36.38 | 37.68 |
| DFPD [30] | 33.80 | 37.21 | 33.00 | 34.27 | 40.26 | 42.54 | 39.86 | 40.72 | 36.39 | 39.34 | 35.74 | 36.85 |
| WA [51] | 33.25 | 36.81 | 32.61 | 33.82 | 40.68 | 43.41 | 40.29 | 41.24 | 36.22 | 39.45 | 35.68 | 36.79 |
| HPHD [31] | 35.33 | 39.39 | 34.30 | 35.73 | 40.55 | 42.28 | 39.97 | 40.82 | 37.42 | 40.55 | 36.57 | 37.77 |
| SSD [39] | 35.02 | 38.27 | 33.80 | 35.23 | 38.83 | 40.51 | 39.08 | 39.40 | 36.54 | 39.17 | 35.91 | 36.90 |
| RAD [52] | 33.46 | 37.15 | 33.28 | 34.26 | 39.74 | 43.81 | 40.06 | 40.83 | 35.97 | 39.82 | 35.99 | 36.89 |
| LSSC [16] | 36.03 | 38.84 | 34.73 | 36.17 | 42.42 | 45.79 | 41.64 | 42.93 | 38.59 | 41.62 | 37.49 | 38.87 |
| GBTF [34] | 33.98 | 37.34 | 33.07 | 34.38 | 41.74 | 44.84 | 41.04 | 42.23 | 37.09 | 40.34 | 36.25 | 37.52 |
| OAP [50] | 32.94 | 35.16 | 32.31 | 33.26 | 40.13 | 43.26 | 39.78 | 40.79 | 35.81 | 38.40 | 35.30 | 36.27 |
| IGD [33] | 34.33 | 37.38 | 33.46 | 34.70 | 41.72 | 44.85 | 41.10 | 42.26 | 37.29 | 40.37 | 36.51 | 37.72 |
| NAT [40] | 36.31 | 39.82 | 34.50 | 36.27 | 38.35 | 40.50 | 37.95 | 38.79 | 37.13 | 40.09 | 35.88 | 37.28 |
| CS [43] | 35.56 | 38.84 | 34.58 | 35.92 | 41.01 | 44.17 | 40.12 | 41.43 | 37.74 | 40.97 | 36.80 | 38.12 |
| ESF [37] | 33.45 | 36.36 | 32.67 | 33.83 | 41.48 | 44.81 | 40.84 | 42.04 | 36.66 | 39.74 | 35.94 | 37.11 |
| MSG [35] | 34.38 | 37.65 | 33.39 | 34.72 | 42.14 | 45.31 | 41.40 | 42.63 | 37.48 | 40.72 | 36.59 | 37.89 |
| RI [8] | 36.11 | 39.99 | 35.38 | 36.50 | 39.72 | 42.17 | 38.88 | 40.03 | 37.55 | 40.86 | 36.78 | 37.91 |
| AICC [42] | 35.41 | 39.11 | 34.00 | 35.60 | 41.52 | 44.60 | 41.03 | 42.09 | 37.86 | 41.30 | 36.81 | 38.20 |
| ECC [13] | 36.69 | 39.99 | 35.32 | 36.79 | 39.94 | 42.17 | 39.01 | 40.17 | 37.99 | 40.86 | 36.80 | 38.14 |
| MLRI [10] | 36.72 | 40.23 | 35.59 | 36.92 | 40.24 | 42.31 | 39.51 | 40.52 | 38.13 | 41.06 | 37.16 | 38.36 |
| IRI [11] | 36.62 | 40.28 | 35.79 | 36.98 | 40.27 | 43.48 | 39.72 | 40.85 | 38.08 | 41.56 | 37.36 | 38.53 |
| DDR [15] | 37.09 | 40.33 | 35.62 | 37.15 | 40.71 | 42.63 | 39.89 | 40.92 | 38.54 | 41.25 | 37.33 | 38.66 |
| FR [15] | 37.48 | 41.00 | 35.81 | 37.47 | 40.55 | 42.40 | 39.75 | 40.75 | 38.70 | 41.56 | 37.38 | 38.79 |
| ARI (Previous) | 37.37 | 40.68 | 36.05 | 37.49 | 40.87 | 43.75 | 40.25 | 41.37 | 38.77 | 41.91 | 37.73 | 39.04 |
| ARI (Ours) | 37.45 | 40.68 | 36.21 | 37.60 | 41.06 | 43.75 | 40.32 | 41.47 | 38.90 | 41.91 | 37.86 | 39.14 |
| Algorithm | IMAX | Kodak | IMAX+Kodak | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| R | G | B | Ave. | R | G | B | Ave. | R | G | B | Ave. | |
| AP [49] | 0.9237 | 0.9420 | 0.8860 | 0.9172 | 0.9845 | 0.9906 | 0.9822 | 0.9857 | 0.9480 | 0.9614 | 0.9245 | 0.9446 |
| PCSD [26] | 0.9397 | 0.9649 | 0.9040 | 0.9362 | 0.9782 | 0.9844 | 0.9753 | 0.9793 | 0.9551 | 0.9727 | 0.9325 | 0.9535 |
| SA [25] | 0.9200 | 0.9346 | 0.8780 | 0.9109 | 0.9844 | 0.9909 | 0.9816 | 0.9856 | 0.9458 | 0.9571 | 0.9195 | 0.9408 |
| AHD [27] | 0.9268 | 0.9614 | 0.8836 | 0.9239 | 0.9786 | 0.9854 | 0.9750 | 0.9796 | 0.9475 | 0.9710 | 0.9201 | 0.9462 |
| DLMMSE [28] | 0.9339 | 0.9647 | 0.8944 | 0.9310 | 0.9853 | 0.9913 | 0.9822 | 0.9863 | 0.9545 | 0.9753 | 0.9295 | 0.9531 |
| FD [45] | 0.9248 | 0.9481 | 0.8868 | 0.9199 | 0.9840 | 0.9919 | 0.9811 | 0.9856 | 0.9485 | 0.9656 | 0.9245 | 0.9462 |
| HEID [36] | 0.9043 | 0.9294 | 0.8615 | 0.8984 | 0.9855 | 0.9914 | 0.9827 | 0.9865 | 0.9368 | 0.9542 | 0.9100 | 0.9336 |
| VCD [29] | 0.9335 | 0.9570 | 0.9017 | 0.9307 | 0.9798 | 0.9864 | 0.9786 | 0.9816 | 0.9520 | 0.9688 | 0.9325 | 0.9511 |
| LPA [32] | 0.9402 | 0.9652 | 0.9021 | 0.9358 | 0.9876 | 0.9924 | 0.9848 | 0.9883 | 0.9592 | 0.9760 | 0.9352 | 0.9568 |
| DFPD [30] | 0.9352 | 0.9618 | 0.8983 | 0.9318 | 0.9842 | 0.9893 | 0.9816 | 0.9850 | 0.9548 | 0.9728 | 0.9316 | 0.9531 |
| WA [51] | 0.9272 | 0.9558 | 0.8875 | 0.9235 | 0.9858 | 0.9913 | 0.9835 | 0.9869 | 0.9506 | 0.9700 | 0.9259 | 0.9489 |
| HPHD [31] | 0.9488 | 0.9736 | 0.9188 | 0.9471 | 0.9822 | 0.9870 | 0.9790 | 0.9827 | 0.9621 | 0.9790 | 0.9429 | 0.9613 |
| SSD [39] | 0.9509 | 0.9730 | 0.9169 | 0.9469 | 0.9767 | 0.9826 | 0.9755 | 0.9783 | 0.9612 | 0.9768 | 0.9403 | 0.9595 |
| RAD [52] | 0.9288 | 0.9588 | 0.8997 | 0.9291 | 0.9834 | 0.9915 | 0.9825 | 0.9858 | 0.9506 | 0.9719 | 0.9328 | 0.9518 |
| LSSC [16] | 0.9555 | 0.9737 | 0.9278 | 0.9523 | 0.9882 | 0.9934 | 0.9845 | 0.9887 | 0.9686 | 0.9816 | 0.9504 | 0.9669 |
| GBTF [34] | 0.9370 | 0.9618 | 0.8986 | 0.9325 | 0.9876 | 0.9927 | 0.9848 | 0.9884 | 0.9572 | 0.9742 | 0.9331 | 0.9548 |
| OAP [50] | 0.9225 | 0.9418 | 0.8837 | 0.9160 | 0.9845 | 0.9906 | 0.9823 | 0.9858 | 0.9473 | 0.9614 | 0.9231 | 0.9439 |
| IGD [33] | 0.9406 | 0.9623 | 0.9054 | 0.9361 | 0.9874 | 0.9926 | 0.9847 | 0.9882 | 0.9594 | 0.9744 | 0.9371 | 0.9570 |
| NAT [40] | 0.9560 | 0.9749 | 0.9219 | 0.9510 | 0.9769 | 0.9841 | 0.9726 | 0.9779 | 0.9643 | 0.9786 | 0.9422 | 0.9617 |
| CS [43] | 0.9563 | 0.9755 | 0.9306 | 0.9541 | 0.9858 | 0.9915 | 0.9821 | 0.9864 | 0.9681 | 0.9819 | 0.9512 | 0.9671 |
| ESF [37] | 0.9326 | 0.9570 | 0.8935 | 0.9277 | 0.9869 | 0.9924 | 0.9843 | 0.9879 | 0.9543 | 0.9712 | 0.9298 | 0.9517 |
| MSG [35] | 0.9395 | 0.9630 | 0.9027 | 0.9351 | 0.9882 | 0.9931 | 0.9855 | 0.9889 | 0.9590 | 0.9751 | 0.9358 | 0.9566 |
| RI [8] | 0.9597 | 0.9797 | 0.9404 | 0.9599 | 0.9822 | 0.9886 | 0.9770 | 0.9826 | 0.9687 | 0.9833 | 0.9550 | 0.9690 |
| AICC [42] | 0.9586 | 0.9763 | 0.9288 | 0.9546 | 0.9866 | 0.9920 | 0.9841 | 0.9876 | 0.9698 | 0.9826 | 0.9509 | 0.9678 |
| ECC [13] | 0.9639 | 0.9797 | 0.9417 | 0.9618 | 0.9822 | 0.9886 | 0.9766 | 0.9825 | 0.9713 | 0.9833 | 0.9557 | 0.9701 |
| MLRI [10] | 0.9640 | 0.9811 | 0.9420 | 0.9624 | 0.9843 | 0.9888 | 0.9801 | 0.9844 | 0.9721 | 0.9842 | 0.9572 | 0.9712 |
| IRI [11] | 0.9634 | 0.9816 | 0.9430 | 0.9627 | 0.9832 | 0.9902 | 0.9791 | 0.9842 | 0.9713 | 0.9850 | 0.9575 | 0.9713 |
| DDR [15] | 0.9566 | 0.9752 | 0.9340 | 0.9553 | 0.9794 | 0.9831 | 0.9758 | 0.9794 | 0.9657 | 0.9784 | 0.9507 | 0.9649 |
| FR [15] | 0.9588 | 0.9768 | 0.9360 | 0.9572 | 0.9785 | 0.9823 | 0.9747 | 0.9785 | 0.9667 | 0.9790 | 0.9515 | 0.9657 |
| ARI (Previous) | 0.9666 | 0.9828 | 0.9434 | 0.9643 | 0.9832 | 0.9895 | 0.9791 | 0.9840 | 0.9733 | 0.9855 | 0.9577 | 0.9721 |
| ARI (Ours) | 0.9679 | 0.9828 | 0.9465 | 0.9657 | 0.9831 | 0.9895 | 0.9795 | 0.9840 | 0.9740 | 0.9855 | 0.9597 | 0.9730 |
| Algorithm | PSNR | CIEDE2000 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| R | Or | G | Cy | B | s R | sG | sB | ||
| BTES [55] | 49.38 | 45.00 | 48.60 | 42.78 | 44.93 | 34.46 | 42.95 | 36.36 | 2.91 |
| AKU [56] | 52.19 | 47.80 | 48.78 | 45.38 | 48.06 | 38.14 | 44.20 | 39.53 | 2.34 |
| GF [57] | 53.12 | 51.06 | 49.61 | 47.94 | 48.89 | 40.75 | 45.73 | 40.51 | 2.06 |
| RI [58] | 54.93 | 52.31 | 51.08 | 49.42 | 49.86 | 42.49 | 47.19 | 41.26 | 1.88 |
| ARI (Ours) | 55.45 | 52.81 | 51.63 | 49.82 | 50.15 | 43.00 | 47.74 | 41.52 | 1.79 |
| Light | Dataset | Algorithm | PSNR R | PSNR Or | PSNR G | PSNR Cy | PSNR B | 5band PSNR Ave. | sRGB PSNR Ave. | CPSNR | DeltaE | CIEDE 2000 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| D65 | CAVE | BTES [55] | 42.60 | 39.41 | 46.54 | 37.83 | 40.46 | 41.37 | 36.94 | 35.81 | 2.85 | 3.81 |
| GF [7] | 45.36 | 44.76 | 48.06 | 44.68 | 43.96 | 45.36 | 40.00 | 39.38 | 2.35 | 3.09 | ||
| RI [58] | 46.21 | 46.22 | 49.77 | 45.84 | 45.92 | 46.79 | 40.76 | 40.07 | 2.38 | 3.19 | ||
| ARI (Ours) | 47.04 | 46.65 | 49.66 | 45.82 | 46.48 | 47.13 | 40.84 | 40.18 | 2.33 | 3.12 | ||
| D65 | TokyoTech | BTES [55] | 38.27 | 37.05 | 45.51 | 36.34 | 39.11 | 39.26 | 35.58 | 34.28 | 2.07 | 2.58 |
| GF [7] | 43.82 | 43.28 | 46.57 | 42.92 | 43.62 | 44.04 | 39.00 | 38.07 | 1.56 | 1.88 | ||
| RI [58] | 44.59 | 44.96 | 48.23 | 44.39 | 44.90 | 45.41 | 40.08 | 39.03 | 1.46 | 1.74 | ||
| ARI (Ours) | 45.65 | 45.82 | 48.84 | 45.16 | 46.05 | 46.30 | 40.63 | 39.63 | 1.36 | 1.63 | ||
| Given | NUS | BTES [55] | 49.36 | 46.41 | 58.06 | 51.72 | 55.81 | 52.27 | 39.10 | 36.39 | 1.73 | 2.87 |
| GF [7] | 52.36 | 51.46 | 56.90 | 57.01 | 56.51 | 54.85 | 40.11 | 37.40 | 1.68 | 2.78 | ||
| RI [58] | 53.77 | 53.22 | 59.35 | 57.96 | 57.98 | 56.46 | 40.47 | 37.72 | 1.65 | 2.73 | ||
| ARI (Ours) | 54.79 | 54.07 | 59.52 | 58.36 | 58.60 | 57.07 | 40.57 | 37.82 | 1.63 | 2.71 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monno, Y.; Kiku, D.; Tanaka, M.; Okutomi, M. Adaptive Residual Interpolation for Color and Multispectral Image Demosaicking. Sensors 2017, 17, 2787. https://doi.org/10.3390/s17122787
Monno Y, Kiku D, Tanaka M, Okutomi M. Adaptive Residual Interpolation for Color and Multispectral Image Demosaicking. Sensors. 2017; 17(12):2787. https://doi.org/10.3390/s17122787
Chicago/Turabian StyleMonno, Yusuke, Daisuke Kiku, Masayuki Tanaka, and Masatoshi Okutomi. 2017. "Adaptive Residual Interpolation for Color and Multispectral Image Demosaicking" Sensors 17, no. 12: 2787. https://doi.org/10.3390/s17122787
APA StyleMonno, Y., Kiku, D., Tanaka, M., & Okutomi, M. (2017). Adaptive Residual Interpolation for Color and Multispectral Image Demosaicking. Sensors, 17(12), 2787. https://doi.org/10.3390/s17122787