Sliding Mode Observer-Based Current Sensor Fault Reconstruction and Unknown Load Disturbance Estimation for PMSM Driven System


Abstract
:1. Introduction
2. System Description
3. Sensors’ Fault Reconstruction and Unknown Disturbance Estimation Using Sliding Mode Observers
3.1. Sliding Mode Observers Design
- 1.
- ;
- 2.
- , ;
- 3.
- , .
3.2. Lyapunov Stability Analysis
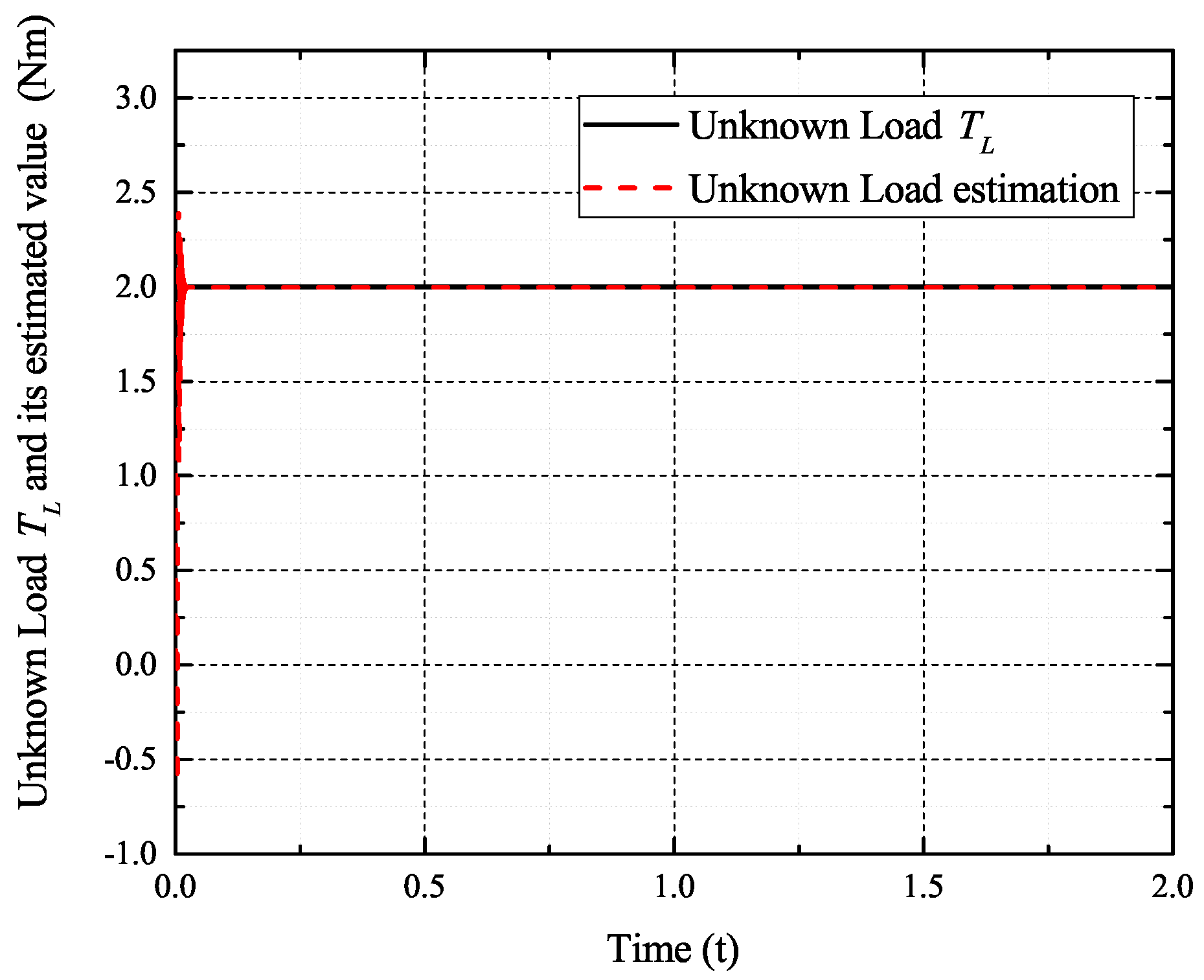
3.3. Sensor Fault Reconstruction and Unknown Load Disturbance Estimation
4. Example: Reconstruct Current Sensor Faults and Estimate the Unknown Load for PMSM
5. Simulations and Experiments
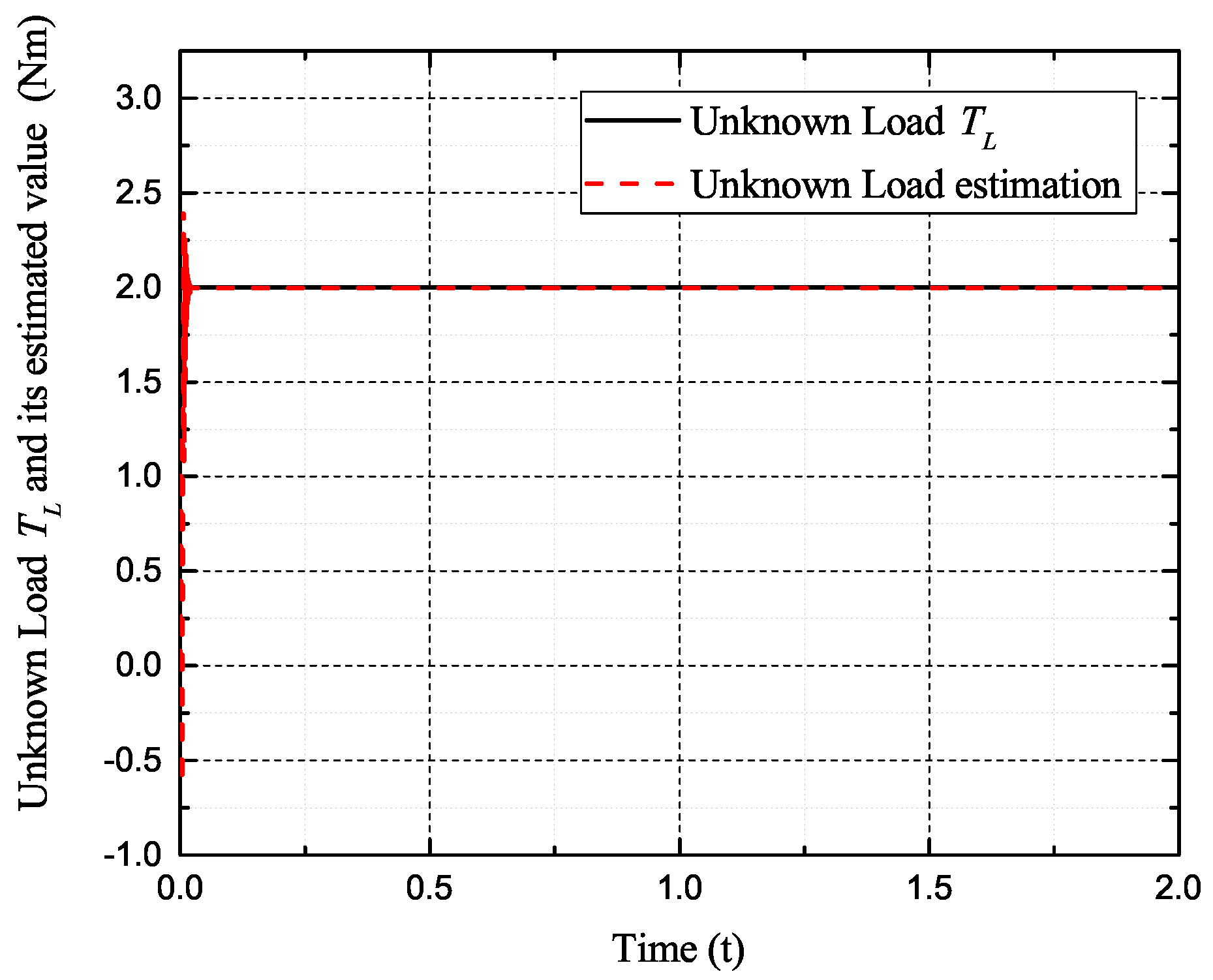
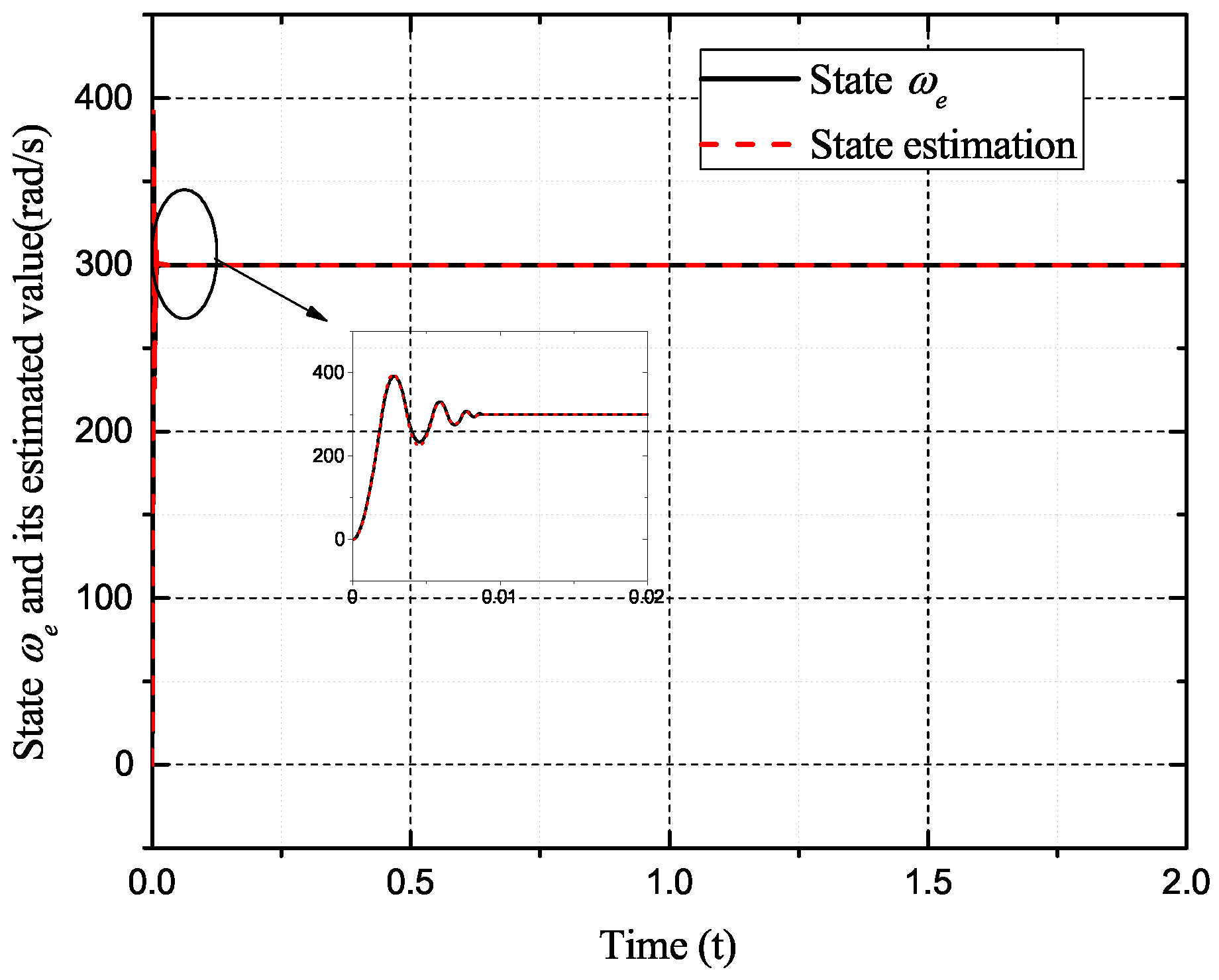
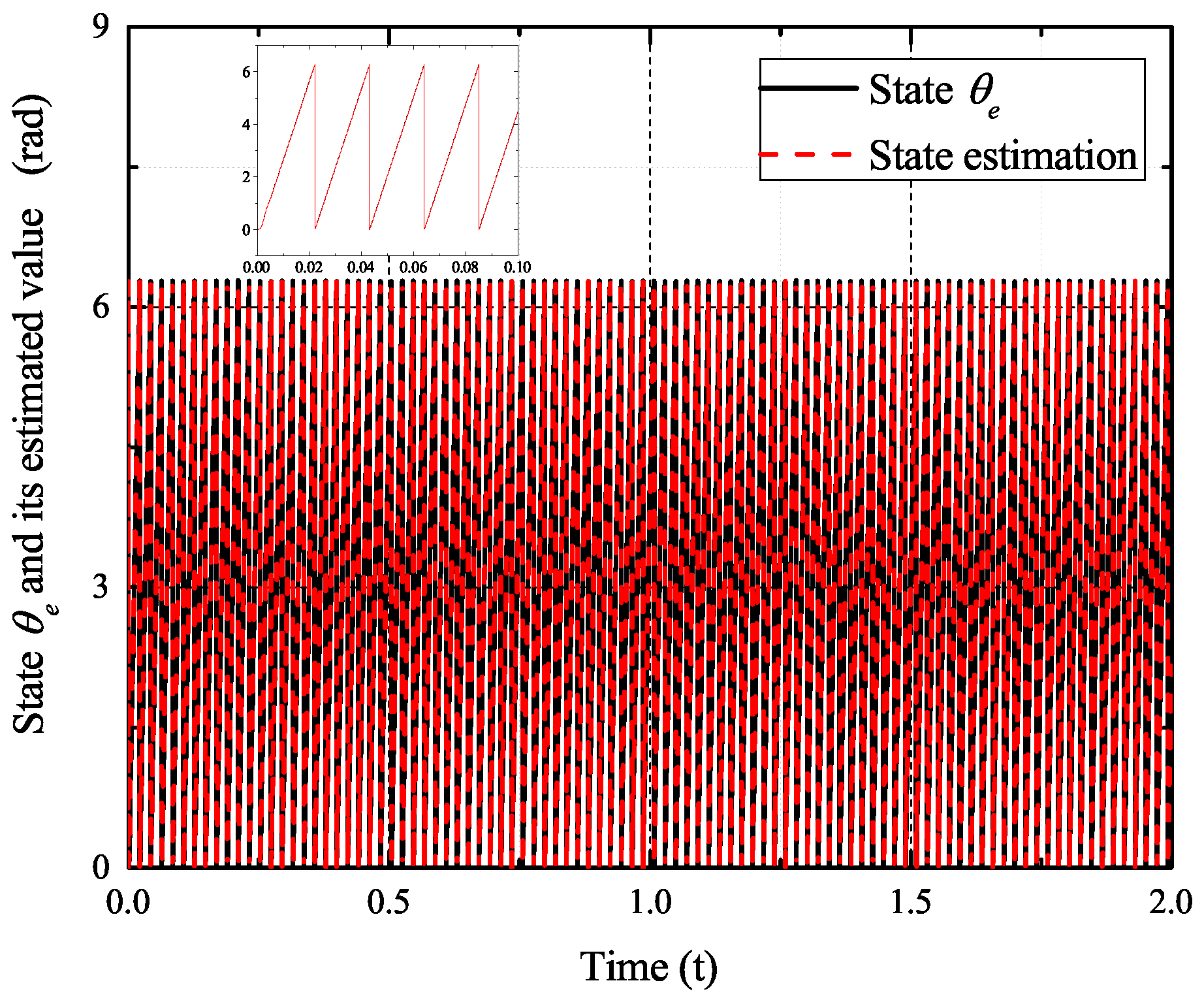
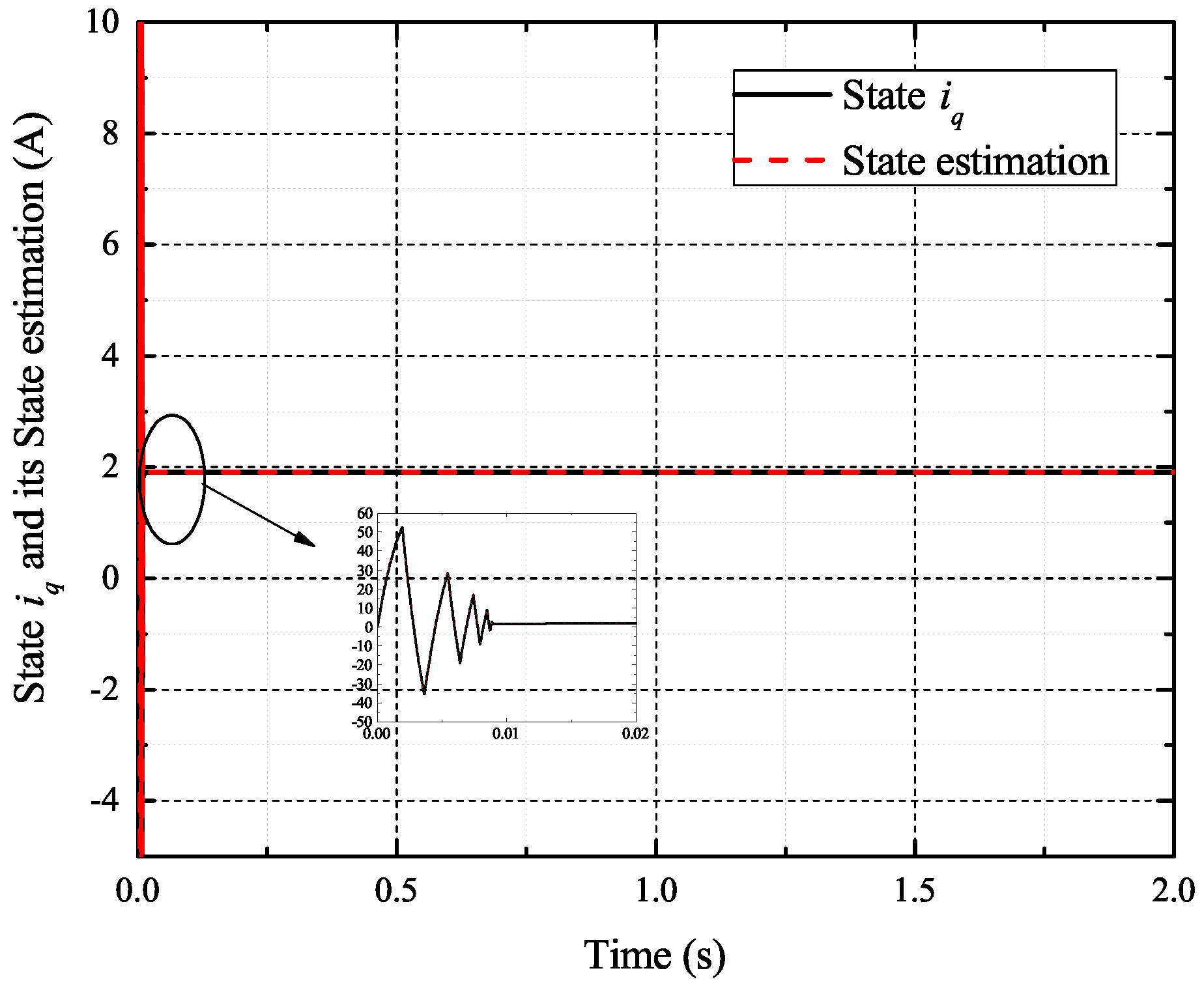
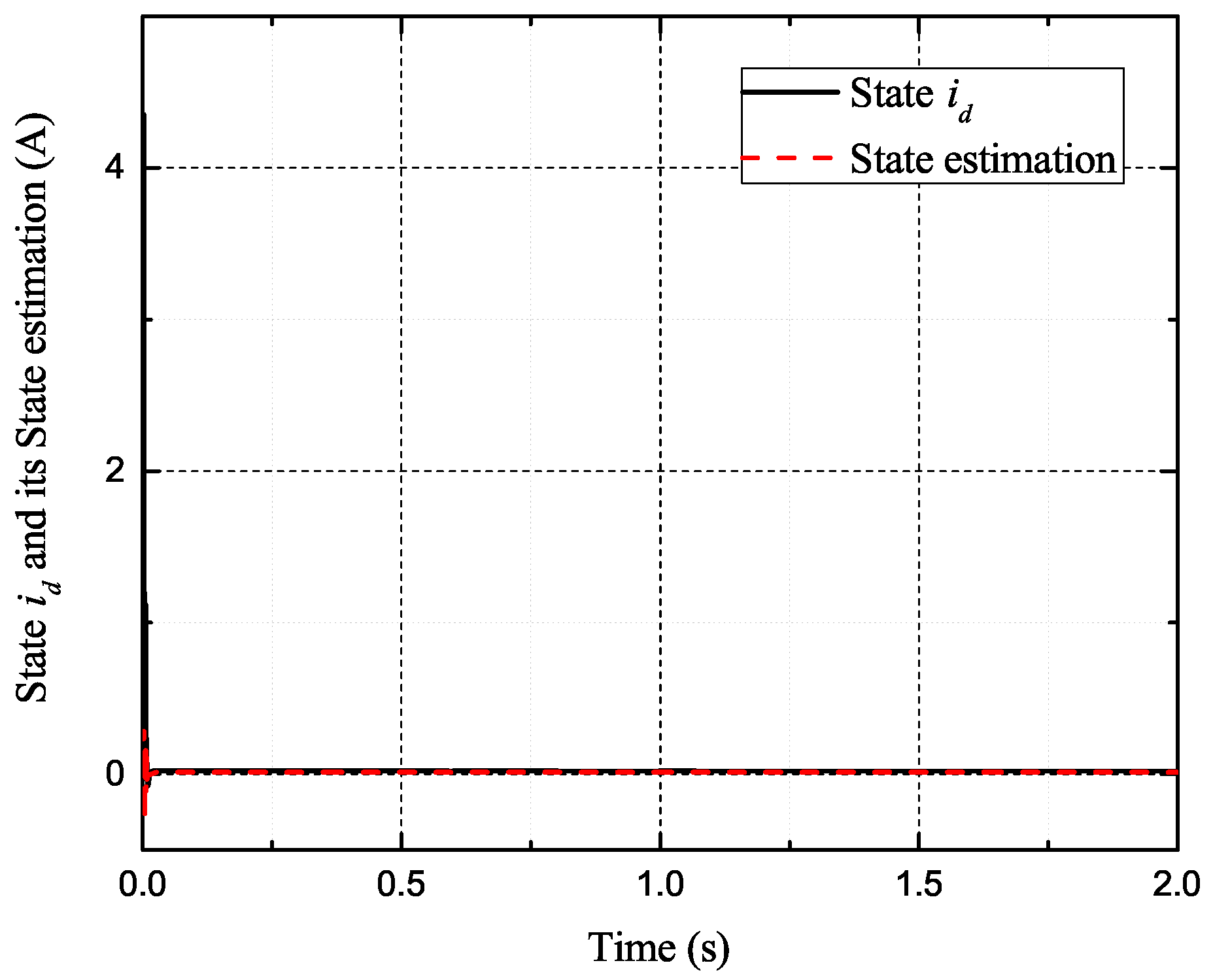
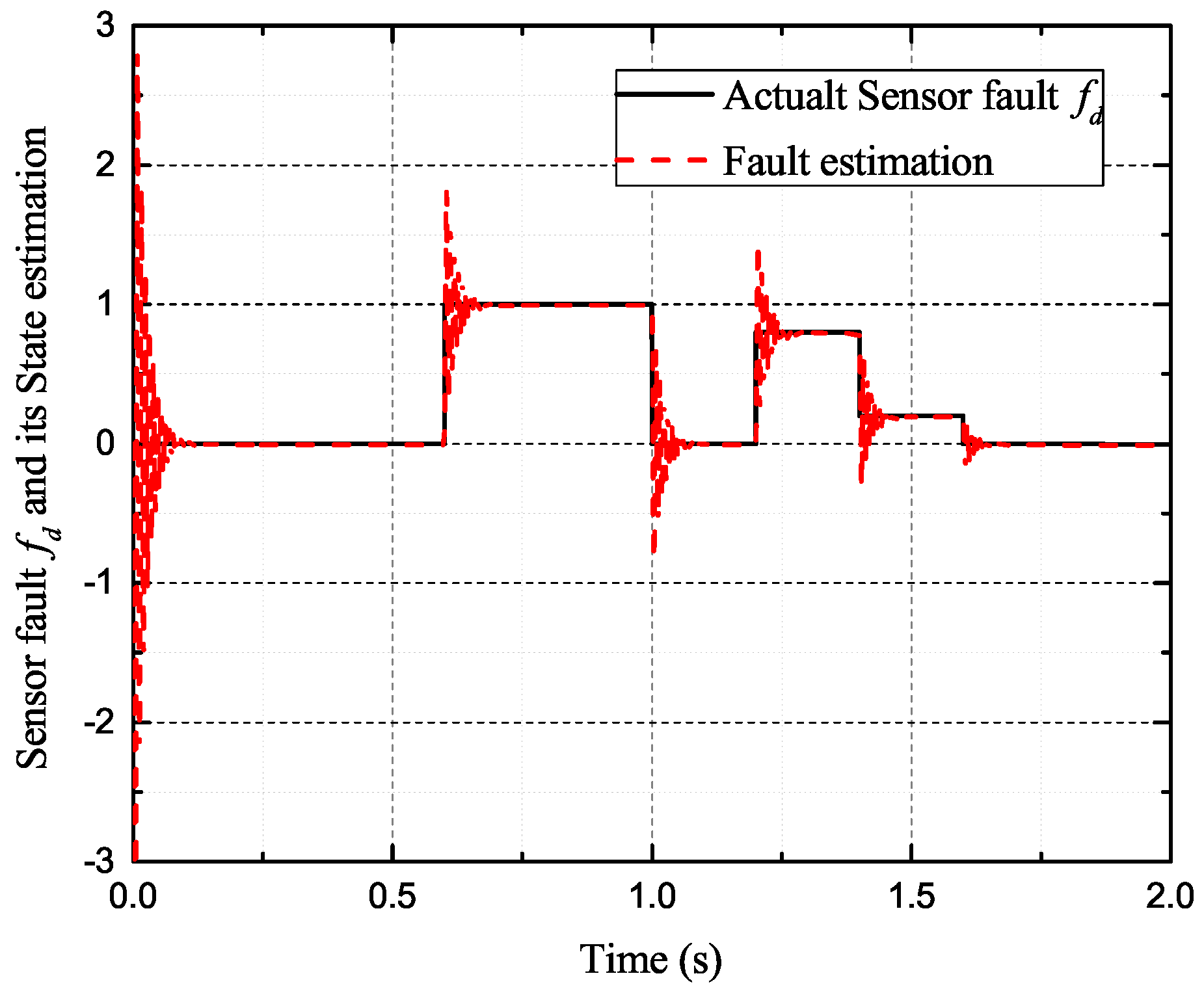
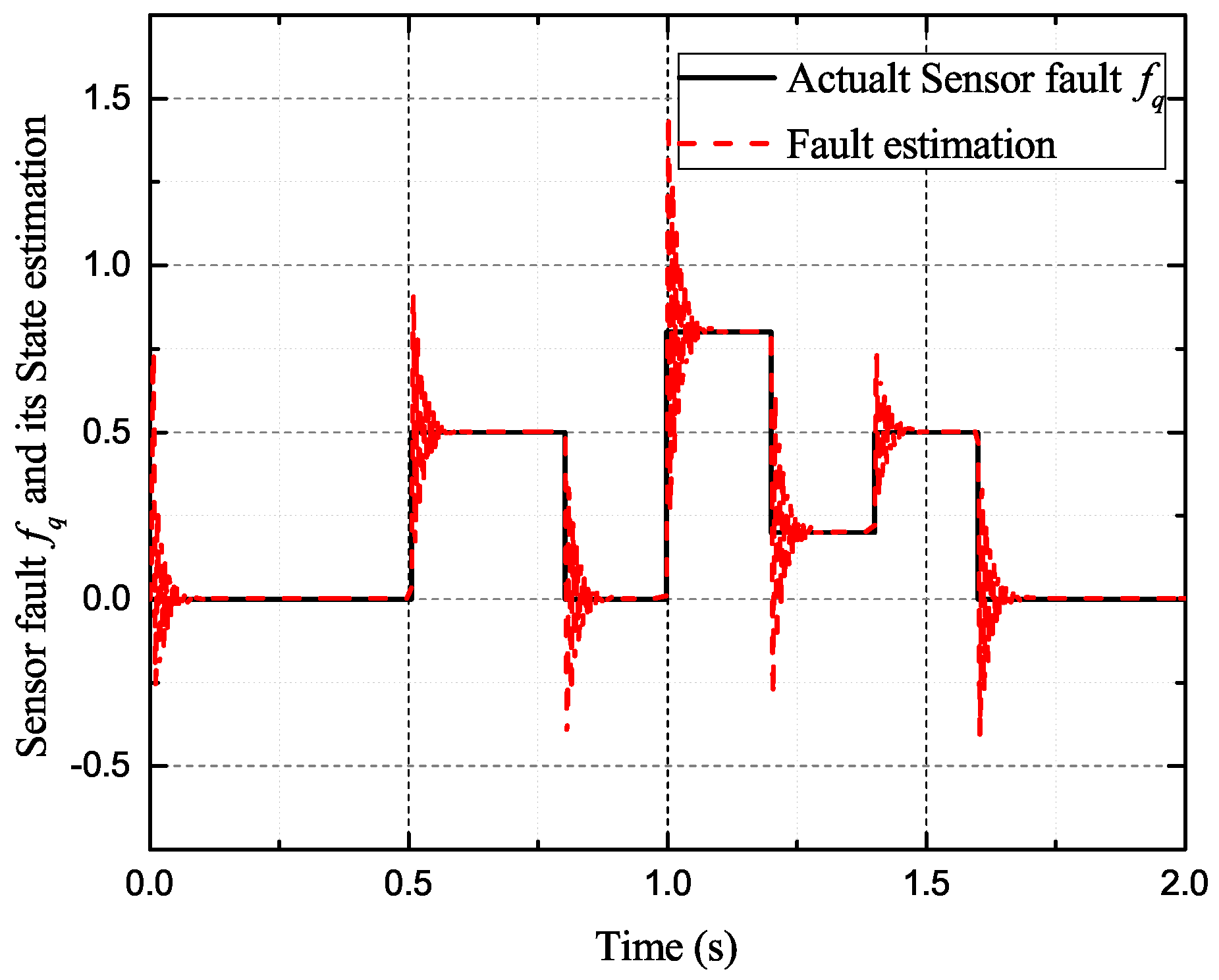
5.1. Simulation Results
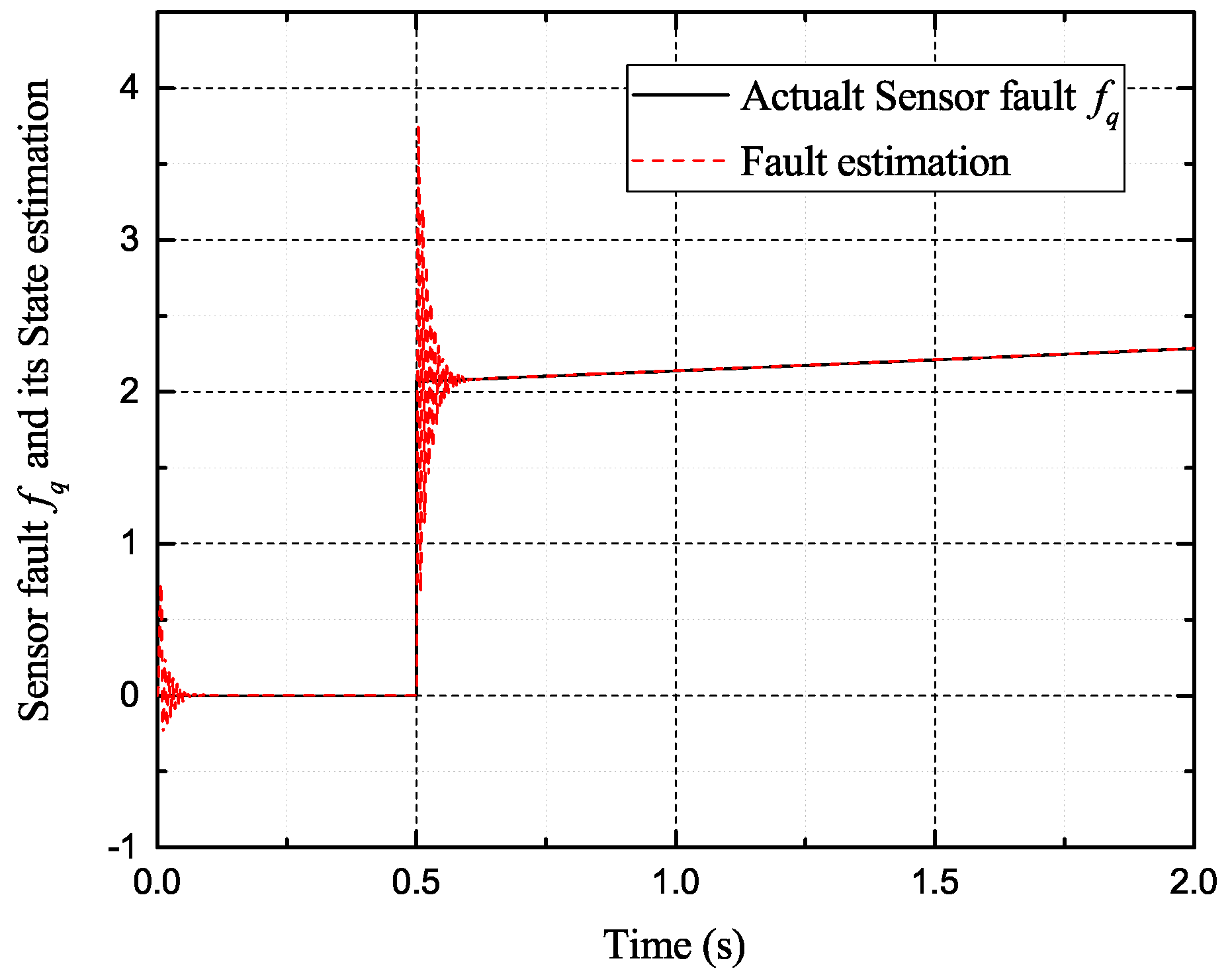
5.1.1. Case 1: Incipient Fault of Current Sensor
5.1.2. Case 2: Intermittent Fault of Current Sensor
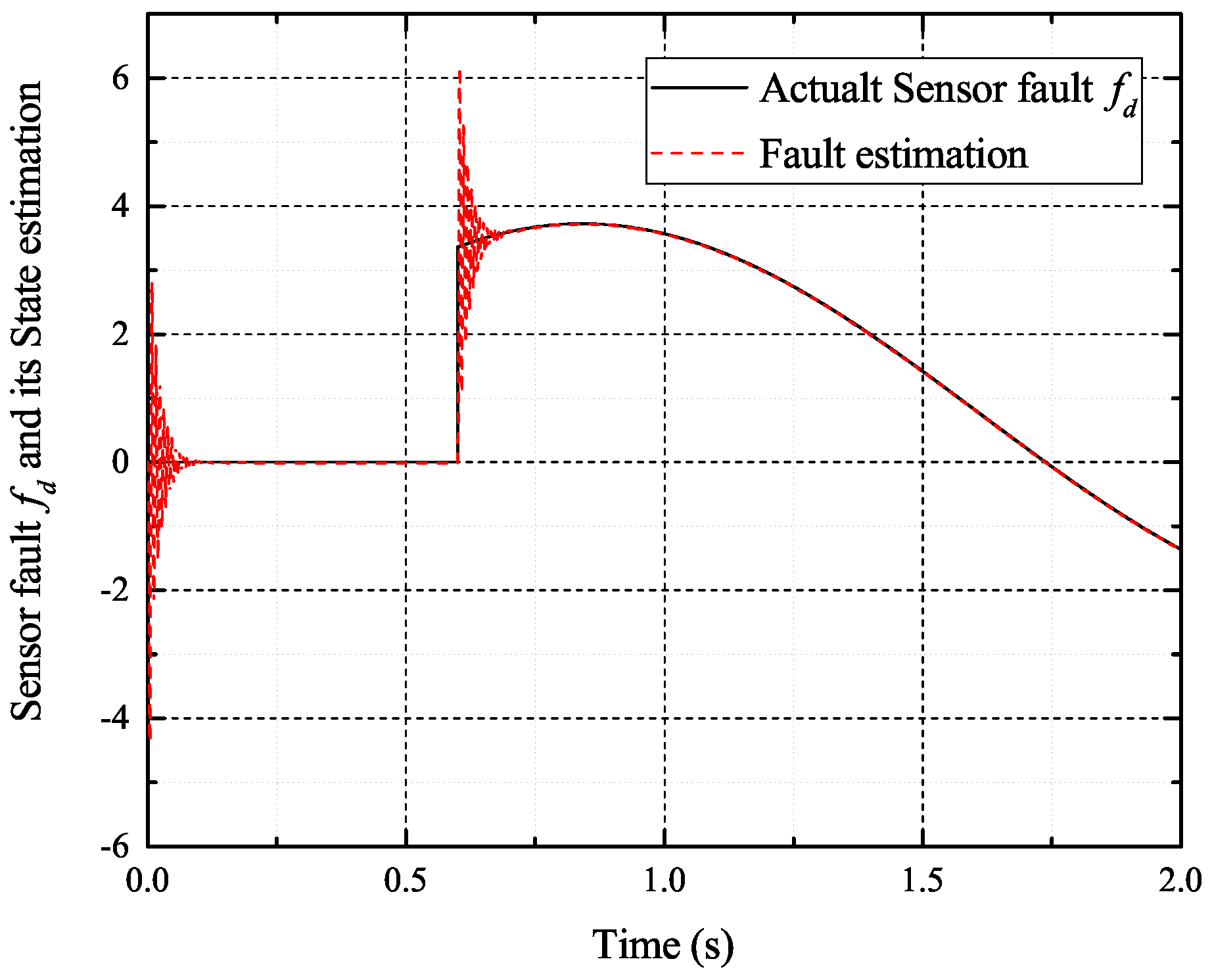
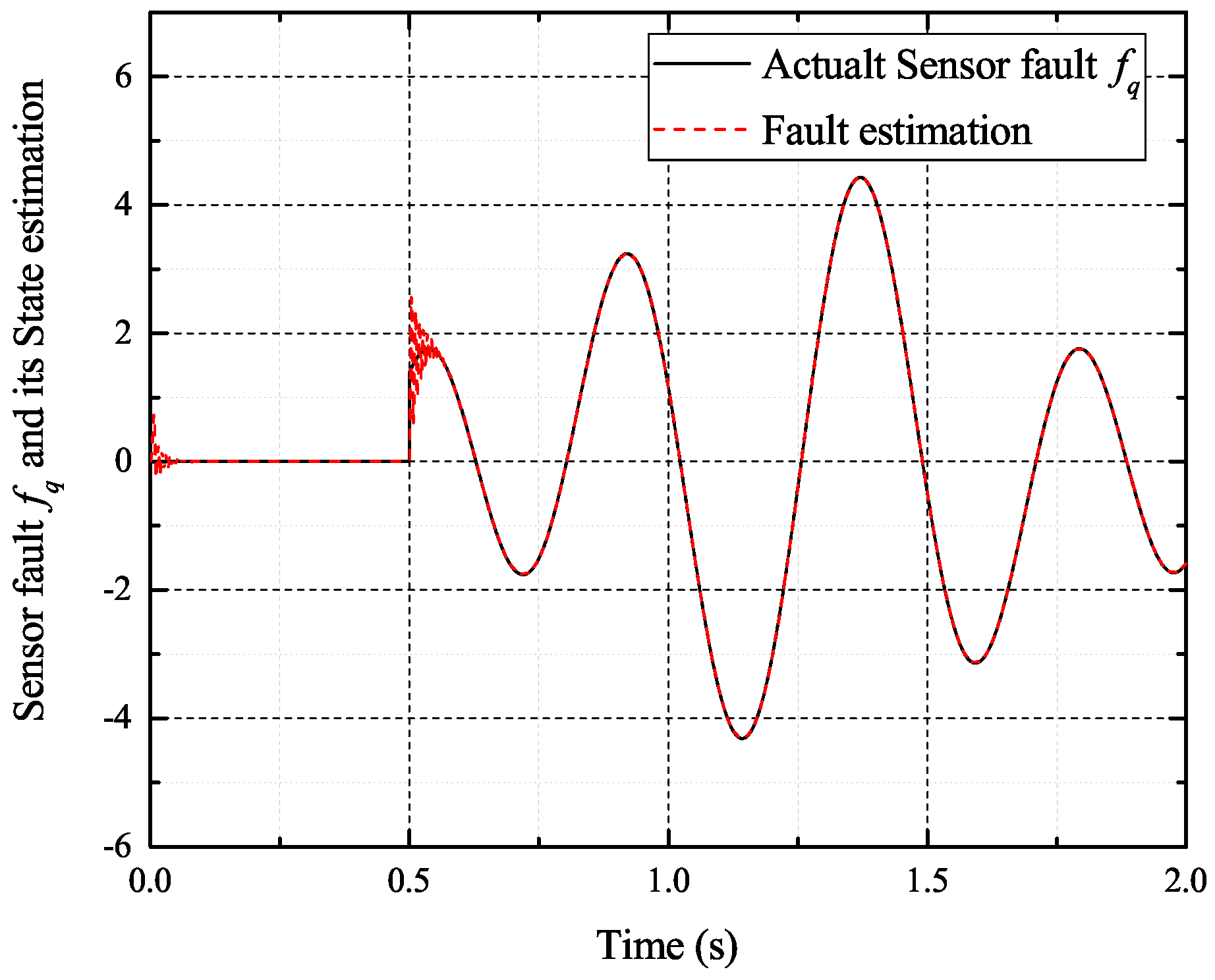
5.1.3. Case 3: High Frequency and Low Frequency Fault of Current Sensor
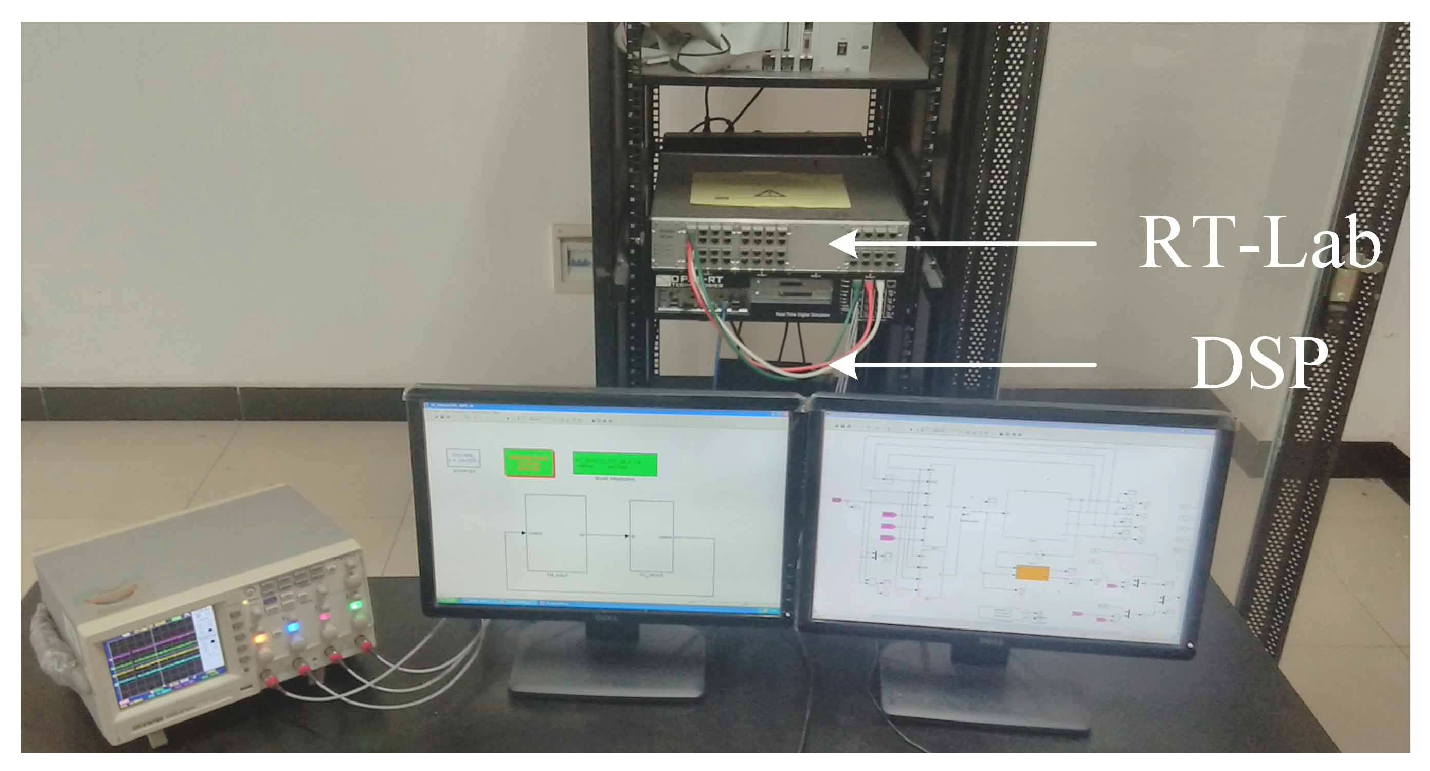
5.2. Experiments Results
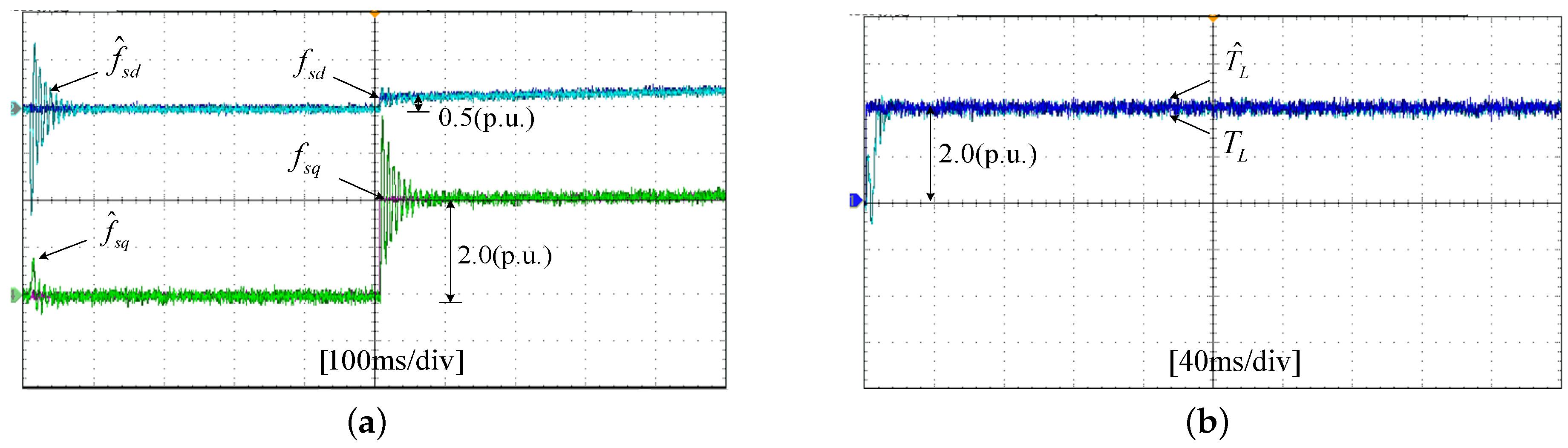
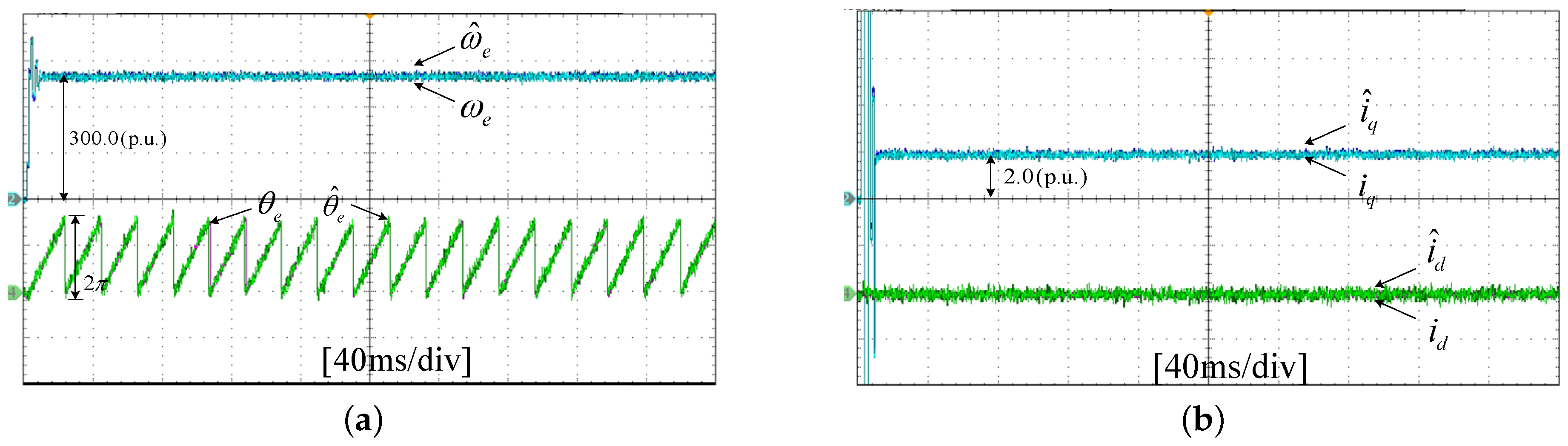
5.2.1. Case 1: Incipient Faults of Current Sensor
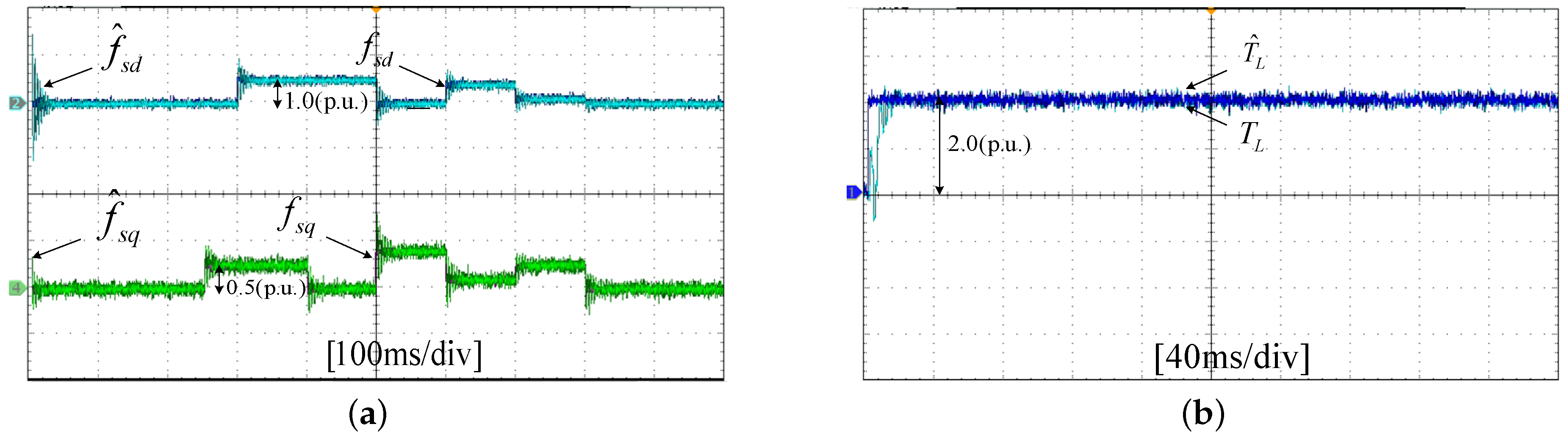
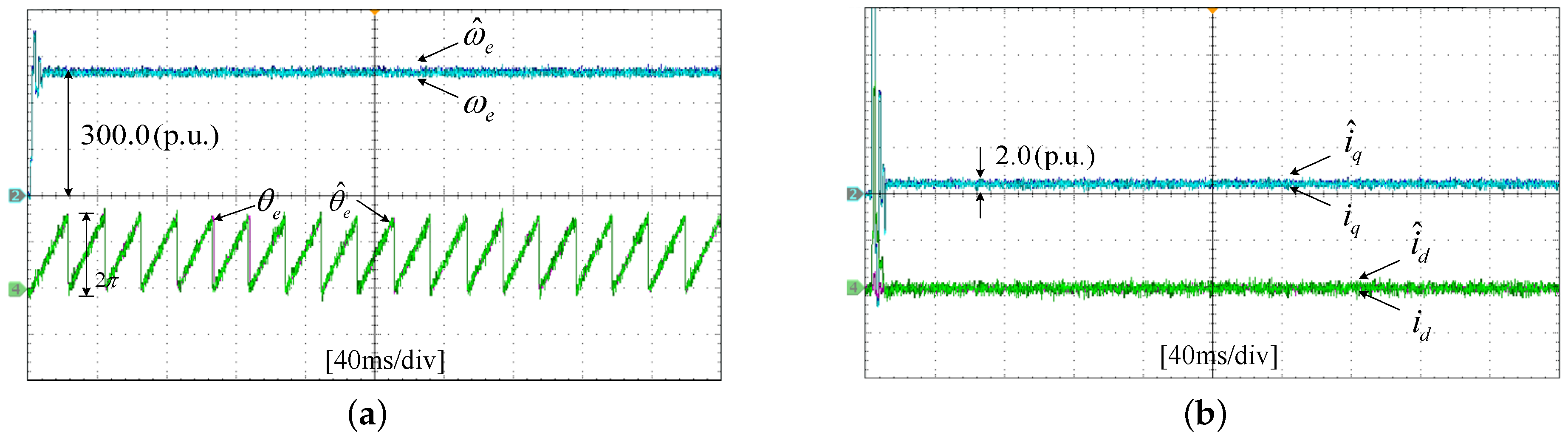
5.2.2. Case 2: Intermittent Fault of Current Sensor
5.2.3. Case 3: High Frequency and Low Frequency Fault of Current Sensor
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jarzebowicz, L.; Karwowski, K.; Kulesza, W.J. Sensorless algorithm for sustaining controllability of IPMSM drive in electric vehicle after resolver fault. Control Eng. Prac. 2017, 58, 117–126. [Google Scholar] [CrossRef]
- El Khil, S.K.; Jlassi, I.; Estima, J.O.; Mrabet-Bellaaj, N.; Cardoso, A.J.M. Current sensor fault detection and isolation method for PMSM drives, using average normalised currents. Electron. Lett. 2016, 52, 1434–1435. [Google Scholar] [CrossRef]
- Freire, N.M.A.; Estima, J.O.; Cardoso, A.J.M. A New Approach for Current Sensor Fault Diagnosis in PMSG Drives for Wind Energy Conversion Systems. IEEE Trans. Ind. Appl. 2014, 50, 1206–1214. [Google Scholar] [CrossRef]
- Zhang, C.F.; Liao, H.J.; Li, X.F.; Sun, J.; He, J. Fault Reconstruction Based on Sliding Mode Observer for Current Sensors of PMSM. J. Sens. 2016, 2016, 1–9. [Google Scholar] [CrossRef]
- Huang, G.; Luo, Y.P.; Zhang, C.F.; He, J.; Huang, Y.S. Current sensor fault reconstruction for PMSM drives. Sensors 2016, 16, 178. [Google Scholar] [CrossRef] [PubMed]
- Huang, G.; Luo, Y.P.; Zhang, C.F.; Huang, Y.S.; Zhao, K.H. Current Sensor Fault Diagnosis Based on a Sliding Mode Observer for PMSM Driven Systems. Sensors 2015, 15, 11027–11049. [Google Scholar] [CrossRef] [PubMed]
- Abderrezak, A.; Madjid, K. Sensor Fault Detection, Localization, and System Reconfiguration with a Sliding Mode Observer and Adaptive Threshold of PMSM. J. Power Electron. 2016, 16, 1012–1024. [Google Scholar] [CrossRef]
- Li, H.; Yao, H.; Hou, S.; Wang, P. Current sensor fault diagnosis and adaptive fault-tolerant control of PMSM drive system based on differential algebraic method. Int. J. Appl. Electromagn. Mech. 2017, 53, 551–565. [Google Scholar] [CrossRef]
- Lan, J.; Patton, R.J. Integrated fault estimation and fault-tolerant control for uncertain Lipschitz nonlinear systems. Int. J. Robust Nonlinear Control 2017, 27, 761–780. [Google Scholar] [CrossRef]
- Wu, Y.; Jiang, B.; Lu, N.; Yang, H.; Zhou, Y. Multiple incipient sensor faults diagnosis with application to high-speed railway traction devices. ISA Trans. 2017, 67, 183–192. [Google Scholar] [CrossRef] [PubMed]
- Valibeygi, A.; Toudeshki, A.; Vijayaraghavan, K. Observer-based sensor fault estimation in nonlinear systems. Proc. Inst. Mech. Eng. Part I 2016, 230, 759–777. [Google Scholar] [CrossRef]
- Shahnazi, R.; Zhao, Q. Adaptive Fuzzy Descriptor Sliding Mode Observer-based Sensor Fault Estimation for Uncertain Nonlinear Systems. Asian J. Control 2016, 18, 1478–1488. [Google Scholar] [CrossRef]
- Ma, H.J.; Yang, G.H. Simultaneous fault diagnosis for robot manipulators with actuator and sensor faults. Inf. Sci. 2016, 366, 12–30. [Google Scholar] [CrossRef]
- Defoort, M.; Veluvolu, K.C.; Rath, J.J.; Djemai, M. Adaptive sensor and actuator fault estimation for a class of uncertain Lipschitz nonlinear systems. Int. J. Adapt. Control Signal Process. 2016, 30, 271–283. [Google Scholar] [CrossRef]
- Yang, J.Q.; Zhu, F.L. FDI Design for Uncertain Nonlinear Systems with Both Actuator and Sensor Faults. Asian J. Control 2015, 17, 213–224. [Google Scholar] [CrossRef]
- Li, X.; Zhu, F.; Xu, L. Actuator and Sensor Fault Reconstructions for Uncertain Lipschitz Nonlinear Systems Based on H∞ Observers. Asian J. Control 2015, 17, 2206–2217. [Google Scholar] [CrossRef]
- Laghrouche, S.; Liu, J.; Ahmed, F.S.; Harmouche, M.; Wack, M. Adaptive Second-Order Sliding Mode Observer-Based Fault Reconstruction for PEM Fuel Cell Air-Feed System. IEEE Trans. Control Syst. Technol. 2015, 23, 1098–1109. [Google Scholar] [CrossRef]
- Veluvolu, K.C.; Defoort, M.; Soh, Y.C. High-gain observer with sliding mode for nonlinear state estimation and fault reconstruction. J. Frankl. Inst. 2014, 351, 1995–2014. [Google Scholar] [CrossRef]
- Rath, J.J.; Veluvolu, K.C.; Defoort, M.; Soh, Y.C. Higher-order sliding mode observer for estimation of tyre friction in ground vehicles. IET Control Theory Appl. 2014, 8, 399–408. [Google Scholar] [CrossRef]
- Zhang, J.; Swain, A.K.; Nguang, S.K. Robust Sliding Mode Observer based Fault Estimation for Certain Class of Uncertain Nonlinear Systems. Asian J. Control 2015, 17, 1296–1309. [Google Scholar] [CrossRef]
- Zhang, J.; Swain, A.K.; Nguang, S.K. Simultaneous robust actuator and sensor fault estimation for uncertain non-linear Lipschitz systems. IET Control Theory Appl. 2014, 8, 1364–1374. [Google Scholar] [CrossRef]
- Haitham, A.R.; Atif, I.; Jaroslaw, G. High Performance Control of AC Drives with Matlab/Simulink Models; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Raoufi, R.; Marquez, H.J.; Zinober, A.S.I. H∞ sliding mode observers for uncertain nonlinear Lipschitz systems with fault estimation synthesis. Int. J. Robust Nonlinear Control 2010, 20, 1785–1801. [Google Scholar] [CrossRef]
- Yu, L. Robust Control-Linear Matrix Inequality Processing Method; TsingHua University Press: Beijing, China, 2002. [Google Scholar]
- Gao, Z.W.; Ding, S.X. Fault reconstruction for Lipschitz nonlinear descriptor systems via linear matrix inequality approach. Circuits Syst. Signal Process. 2008, 27, 295–308. [Google Scholar] [CrossRef]
- Spurgeon, S.K. Sliding mode observers: a survey. Int. J. Syst. Sci. 2008, 39, 751–764. [Google Scholar] [CrossRef]
- Kok, Y.H.; Raoufi, R.; Kwong, R.H.S. Fault-Tolerant Control Using H∞ Sliding Mode Observer. In Proceedings of the 2nd International Conference on Control and Fault-Tolerant Systems (Systol), Nice, France, 9–11 October 2013; pp. 535–541. [Google Scholar]
- Zhang, C.F.; Yan, M.; He, J.; Luo, C. LMI-Based Sliding Mode Observers for Incipient Faults Detection in Nonlinear System. J. Appl. Math. 2012, 2012, 1–13. [Google Scholar] [CrossRef]
- He, J.; Zhang, C.F. On Observer-based Robust Fault Detection and Reconstruction for Nonlinear Systems; China Light Industry Press: Beijing, China, 2012. [Google Scholar]
- Zhao, K.H.; Chen, T.F.; Zhang, C.F.; He, J.; Huang, G. Online Fault Detection of Permanent Magnet Demagnetization for IPMSMs by Nonsingular Fast Terminal-Sliding-Mode Observer. Sensors 2014, 14, 23119–23136. [Google Scholar] [CrossRef] [PubMed]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Unit | Values |
|---|---|---|
| stator resistance () | 2.875 | |
| number of pole pairs () | pairs | 4 |
| q-axis inductance () | H | 0.0075 |
| d-axis inductance () | H | 0.0025 |
| rotor PM flux () | Wb | 0.175 |
| rotational inertia (J) | kg·m | 0.0008 |
| viscous friction coefficient (B) | Nm·s/rad | 0.0001 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, K.; Li, P.; Zhang, C.; Li, X.; He, J.; Lin, Y. Sliding Mode Observer-Based Current Sensor Fault Reconstruction and Unknown Load Disturbance Estimation for PMSM Driven System. Sensors 2017, 17, 2833. https://doi.org/10.3390/s17122833
Zhao K, Li P, Zhang C, Li X, He J, Lin Y. Sliding Mode Observer-Based Current Sensor Fault Reconstruction and Unknown Load Disturbance Estimation for PMSM Driven System. Sensors. 2017; 17(12):2833. https://doi.org/10.3390/s17122833
Chicago/Turabian StyleZhao, Kaihui, Peng Li, Changfan Zhang, Xiangfei Li, Jing He, and Yuliang Lin. 2017. "Sliding Mode Observer-Based Current Sensor Fault Reconstruction and Unknown Load Disturbance Estimation for PMSM Driven System" Sensors 17, no. 12: 2833. https://doi.org/10.3390/s17122833
APA StyleZhao, K., Li, P., Zhang, C., Li, X., He, J., & Lin, Y. (2017). Sliding Mode Observer-Based Current Sensor Fault Reconstruction and Unknown Load Disturbance Estimation for PMSM Driven System. Sensors, 17(12), 2833. https://doi.org/10.3390/s17122833