Signal Subspace Smoothing Technique for Time Delay Estimation Using MUSIC Algorithm



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
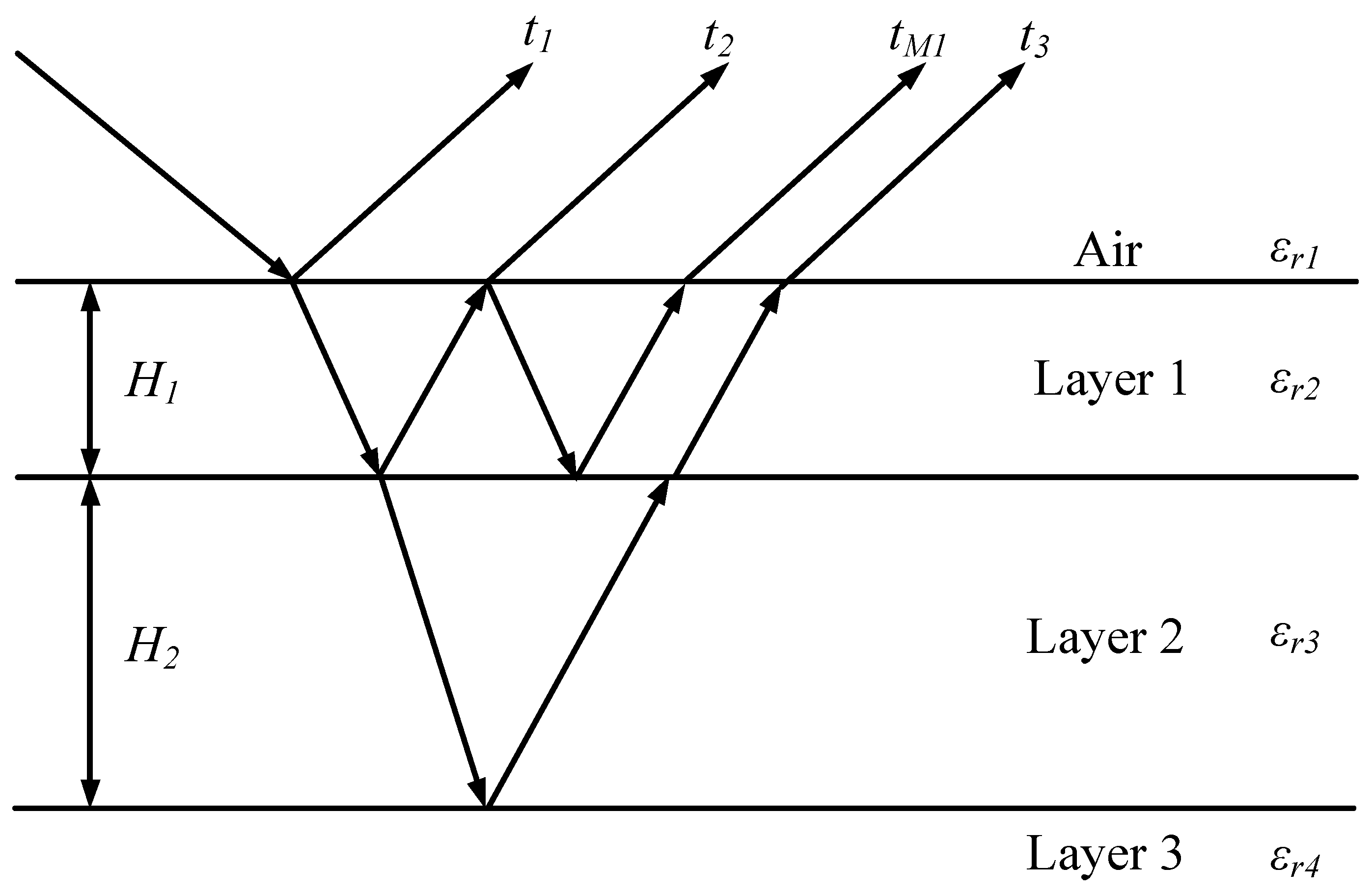
2. Signal Model
- is the received signal vector, called the observation vector, which may represent either the Fourier transform of the measured GPR signal or the measurements by a step-frequency radar;
- is a diagonal matrix, whose diagonal elements are the Fourier transform of the radar pulse ;
- is the mode matrix;
- is the mode vector;
- is a vector;
- is the Gaussian noise vector with zero mean and covariance matrix .
3. Sub-Band Averaging Technique
3.1. Conventional SSP and MSSP
3.2. Proposed SSS Technique
4. Simulations and Experiment
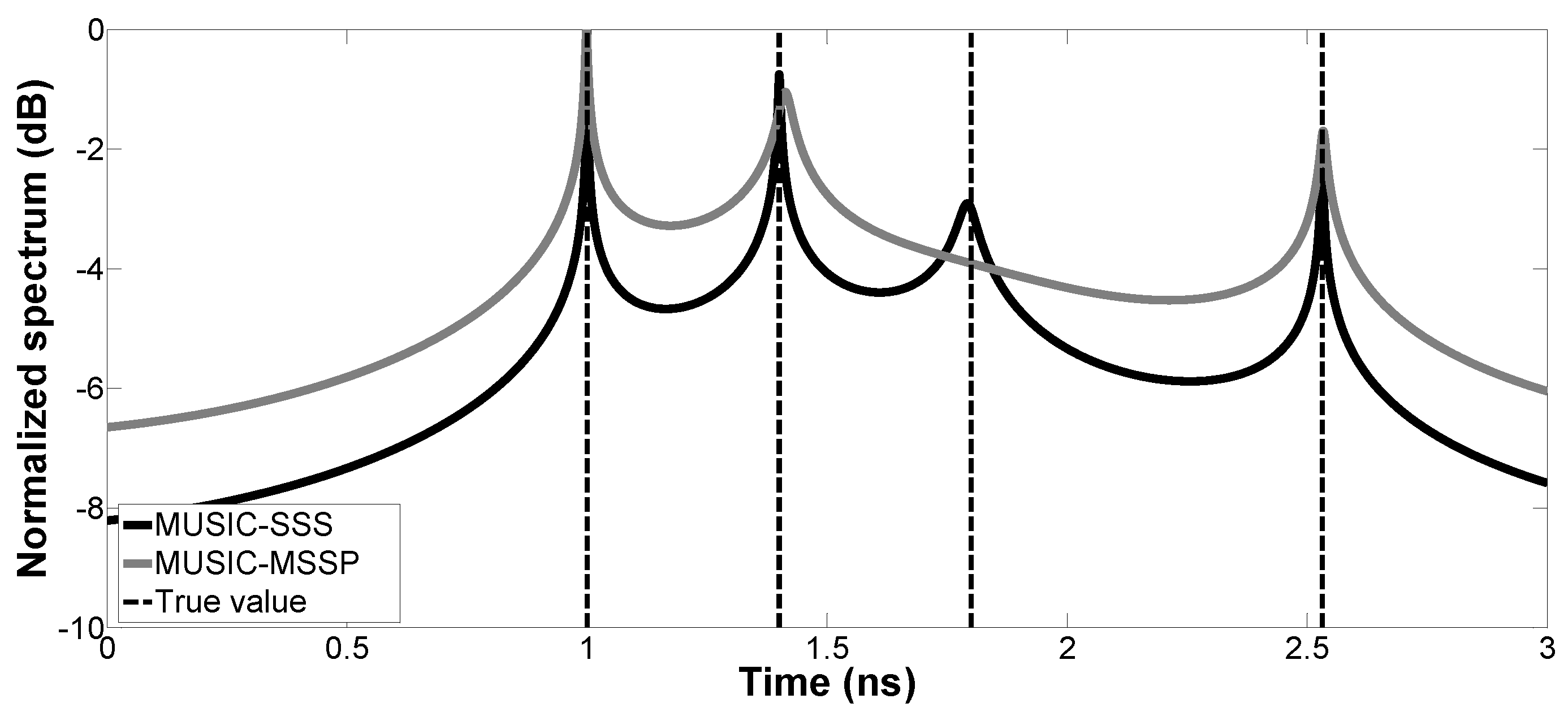
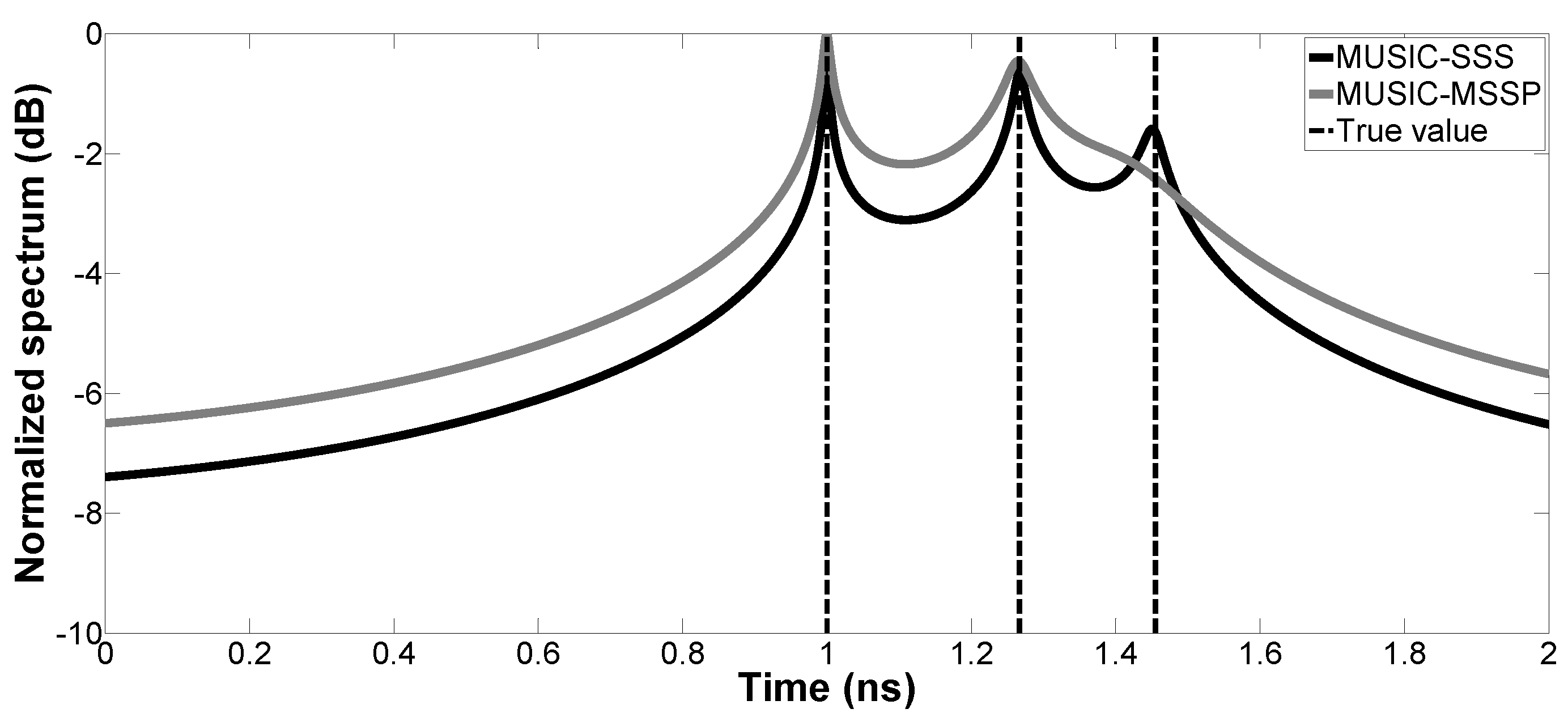
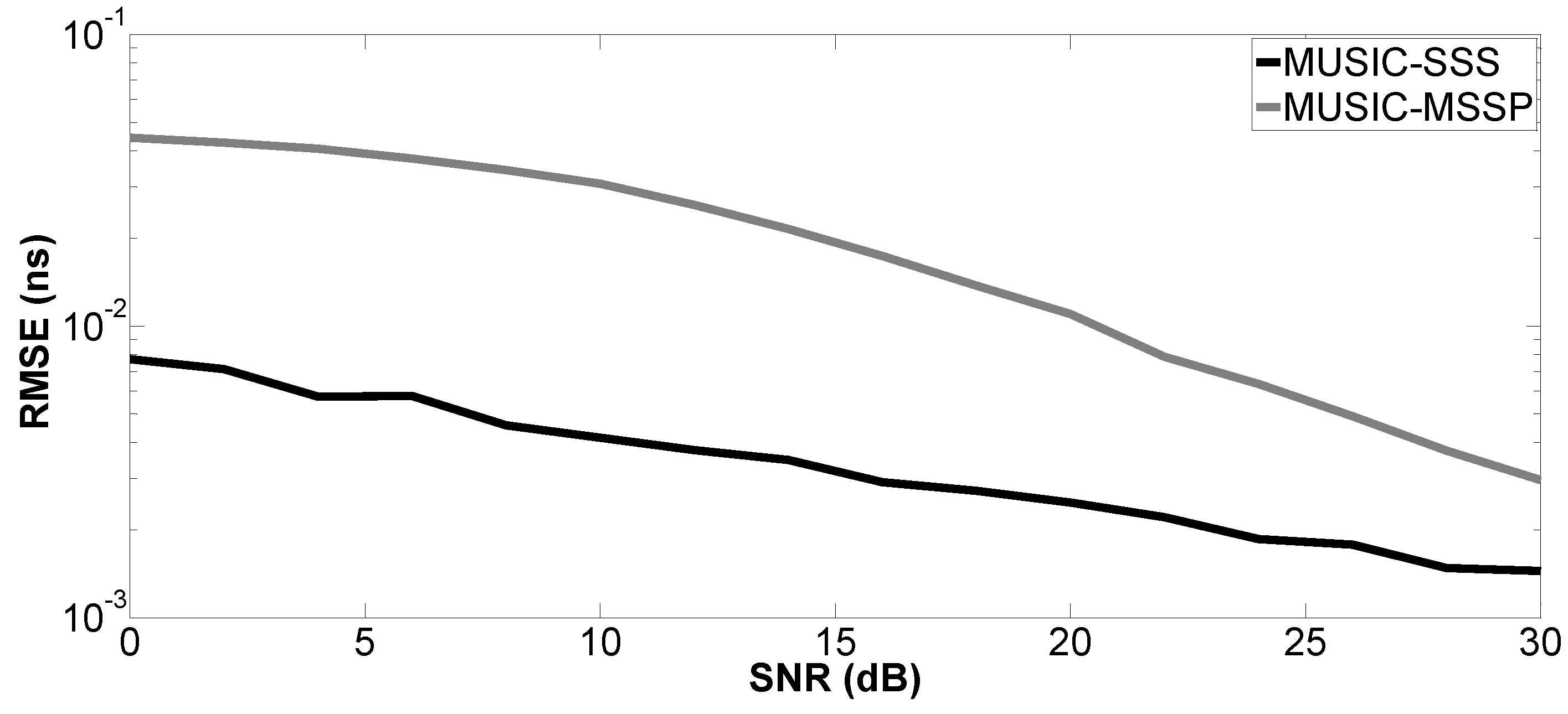
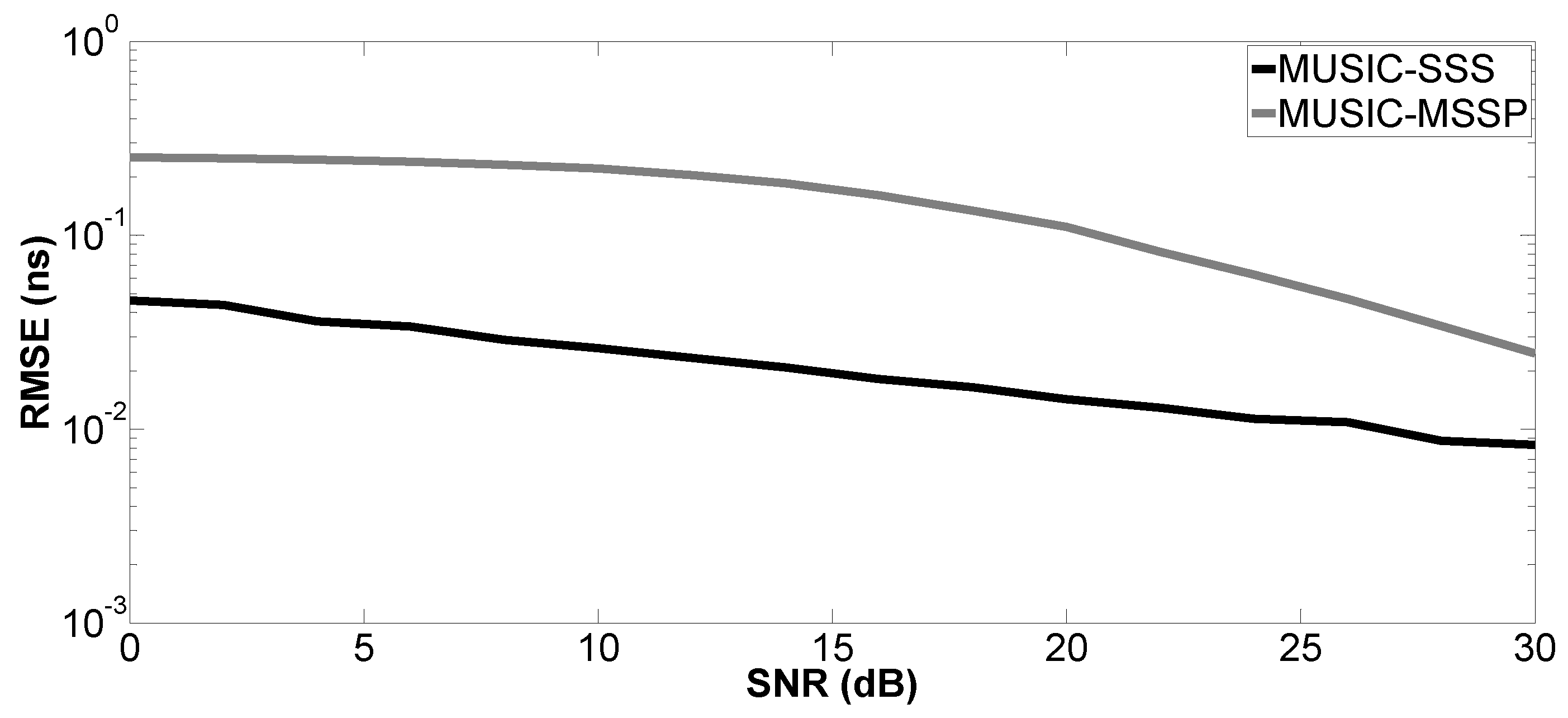
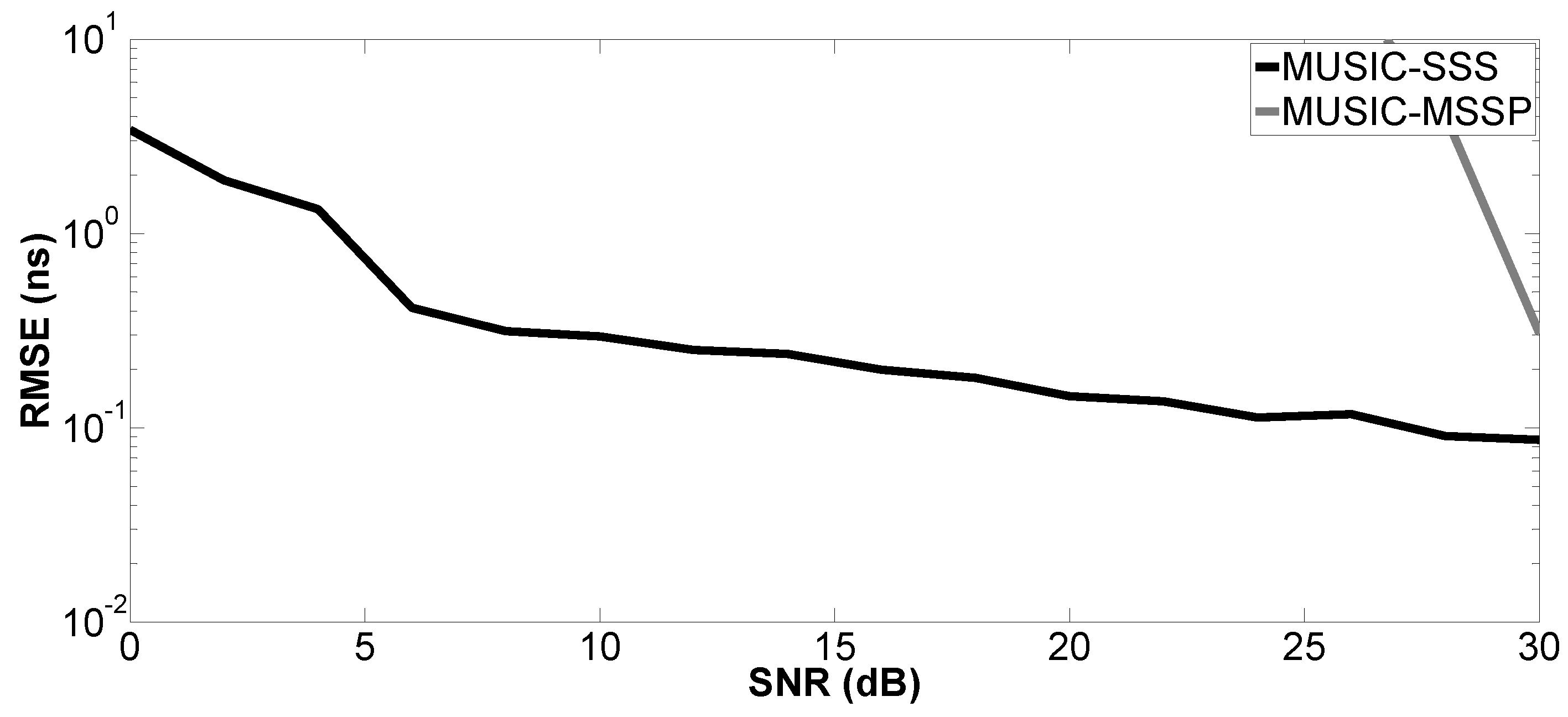
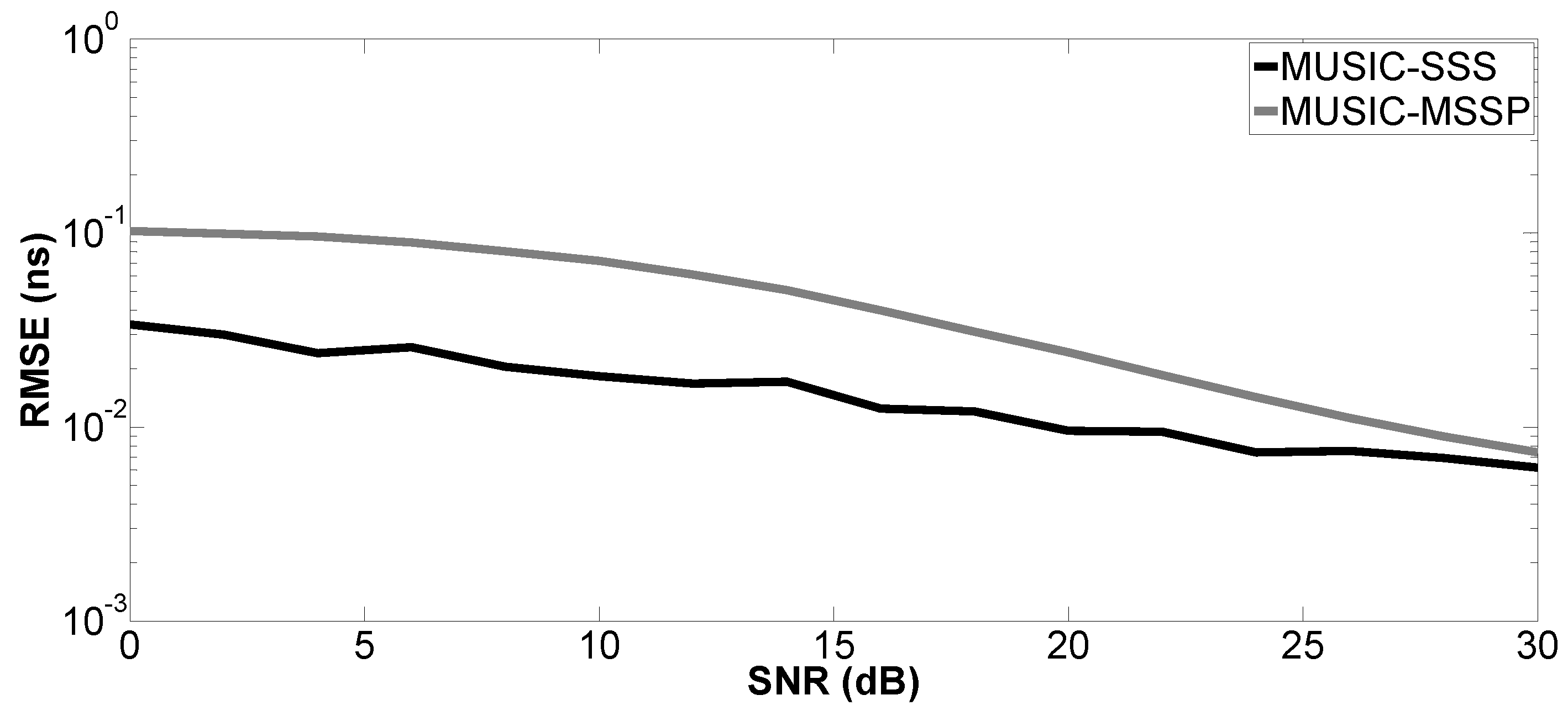
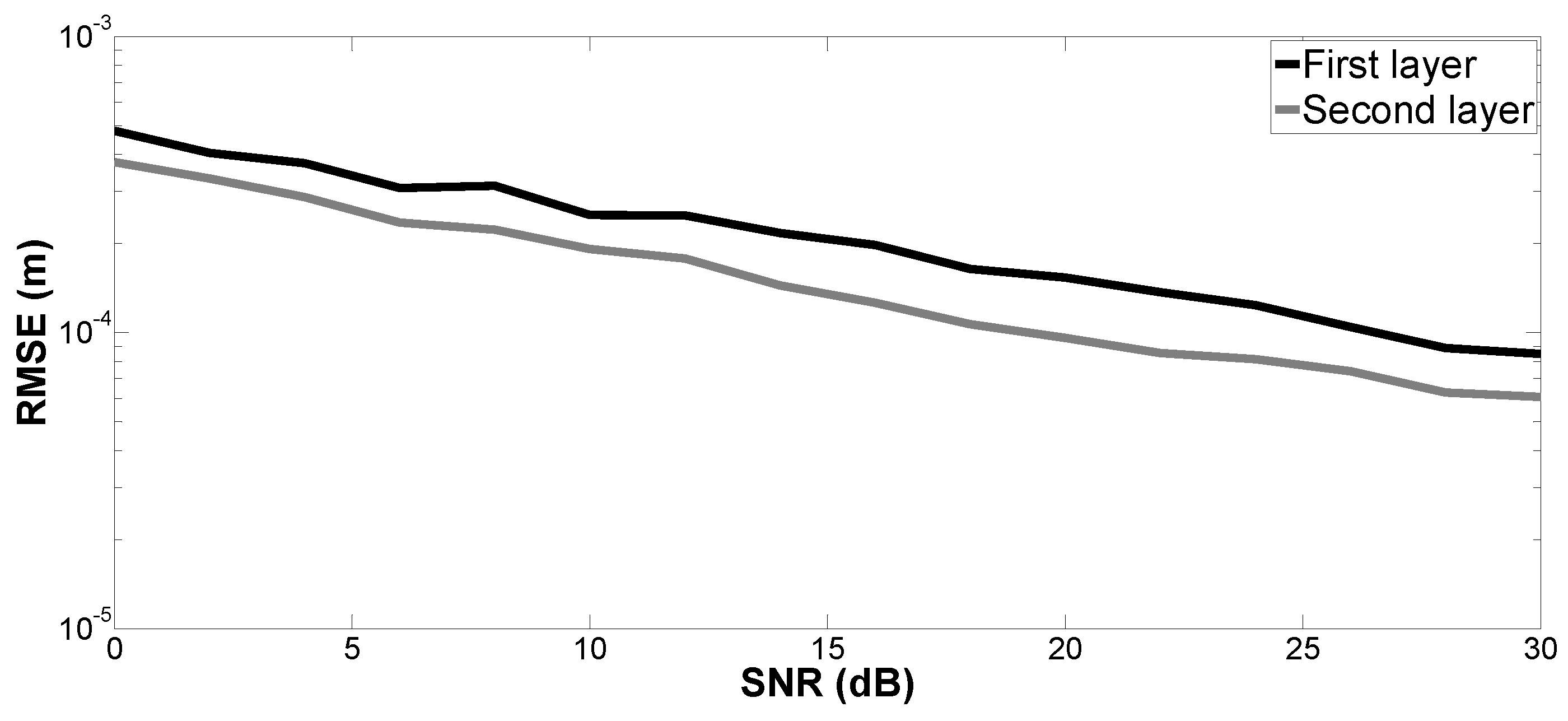
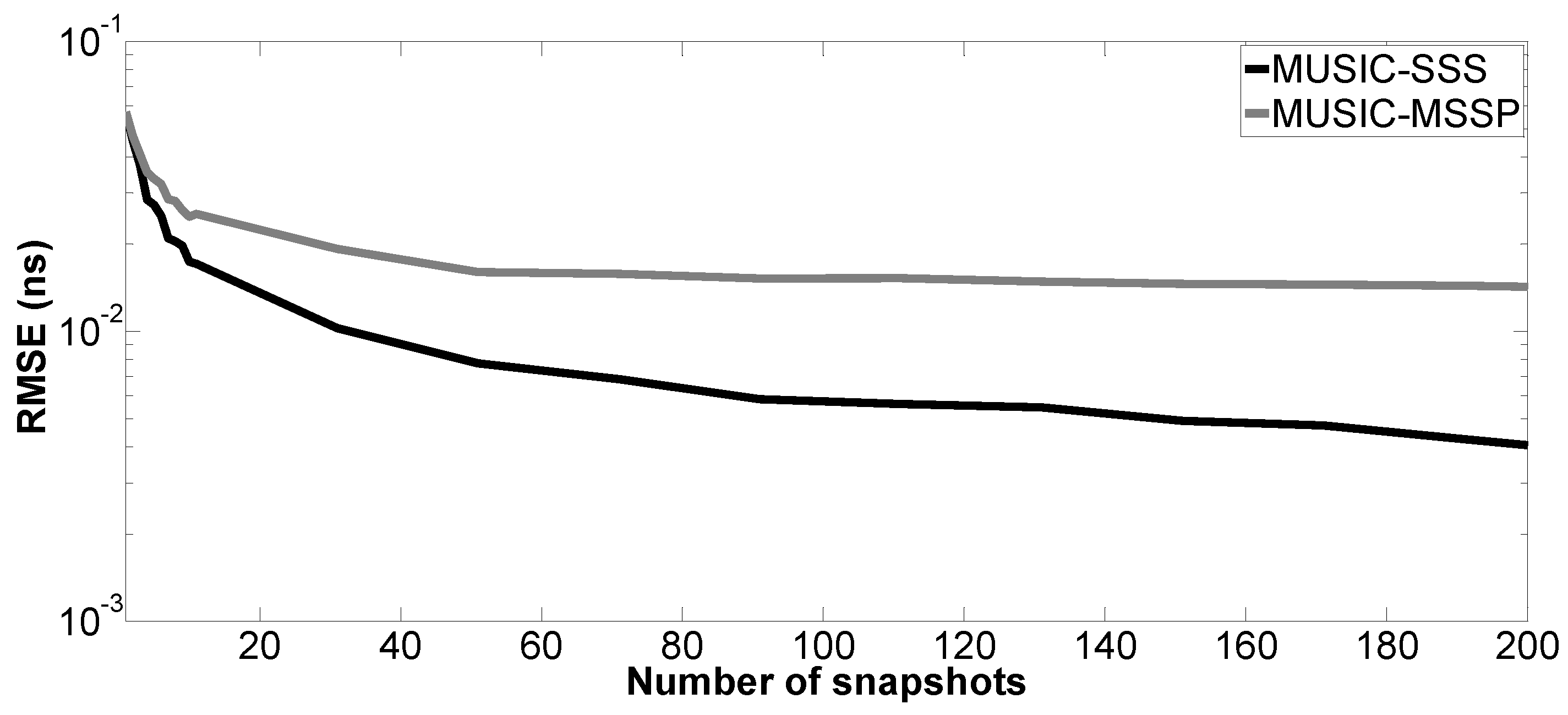
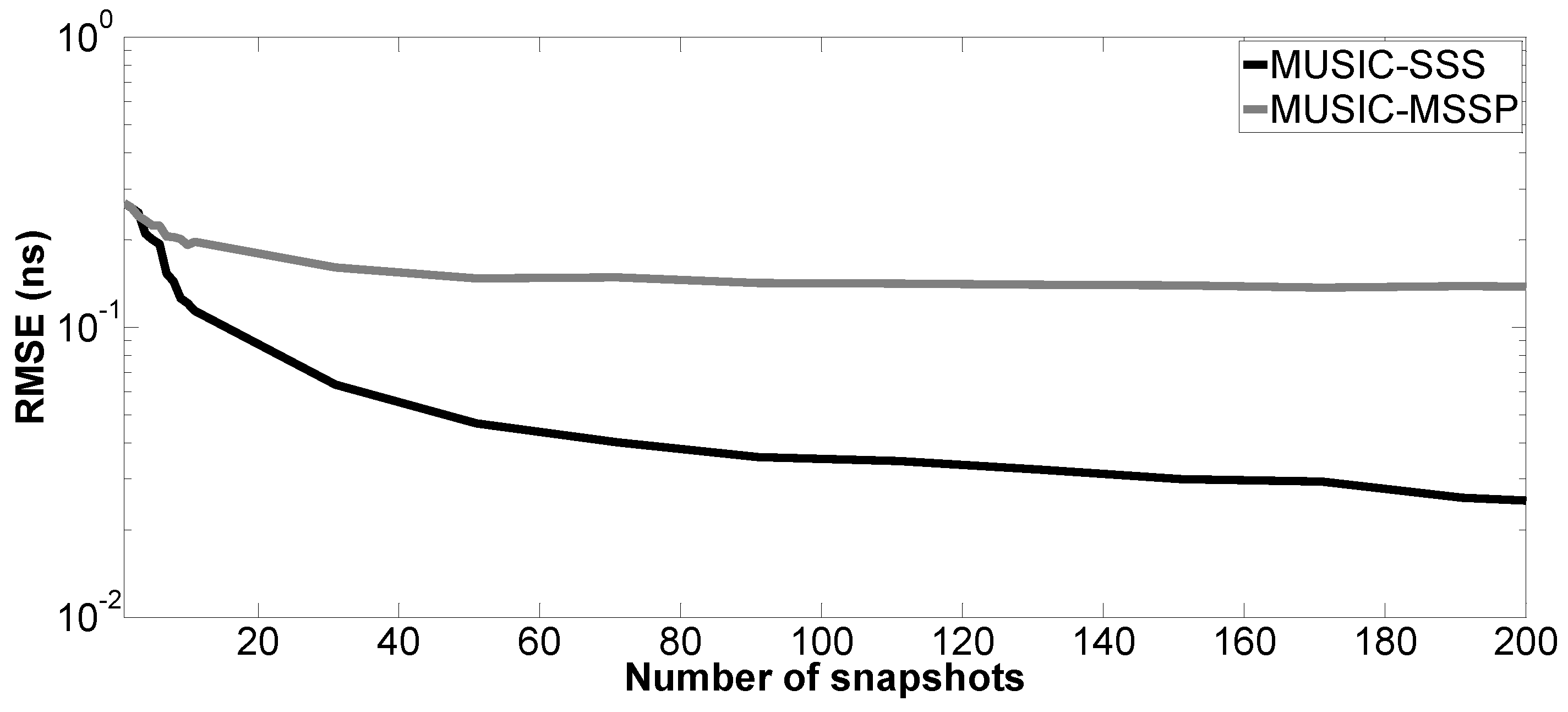
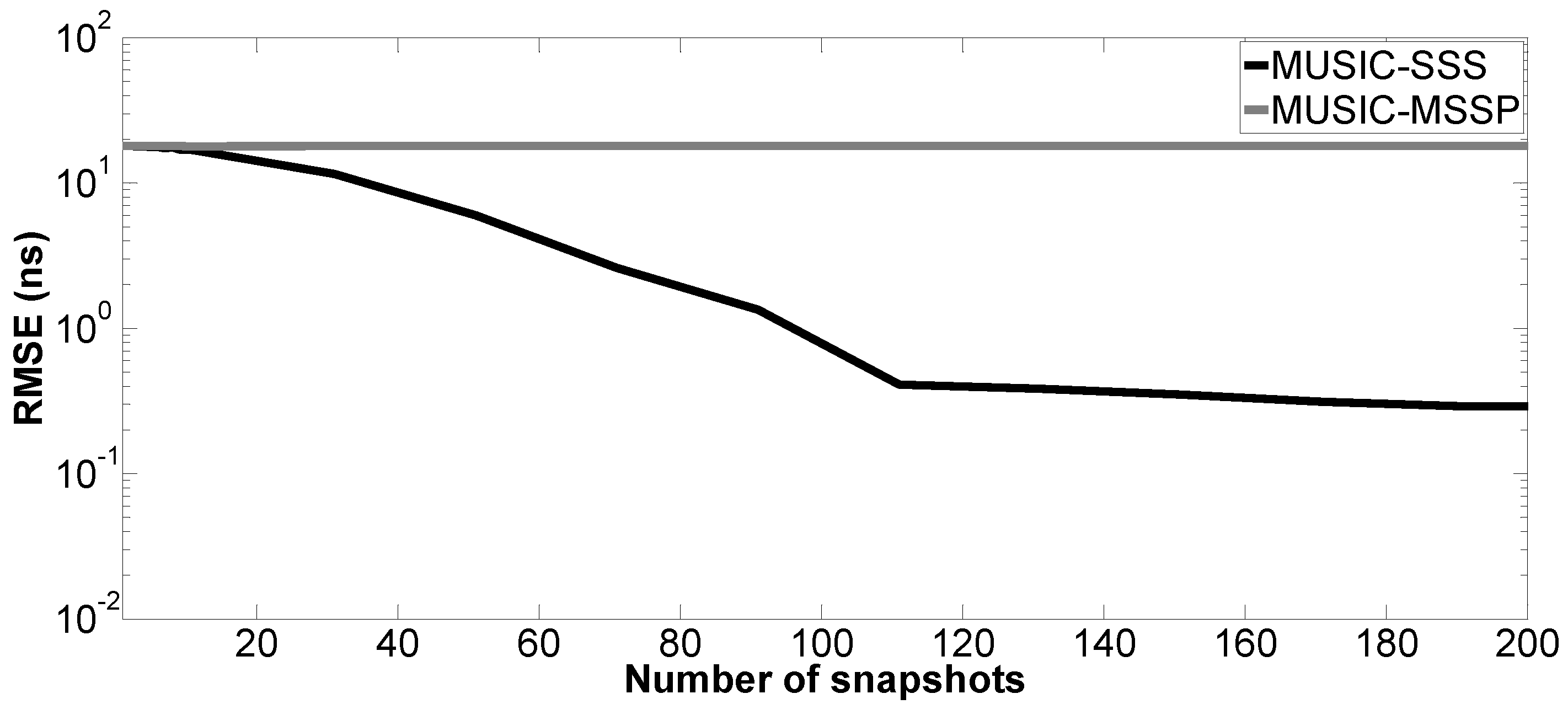
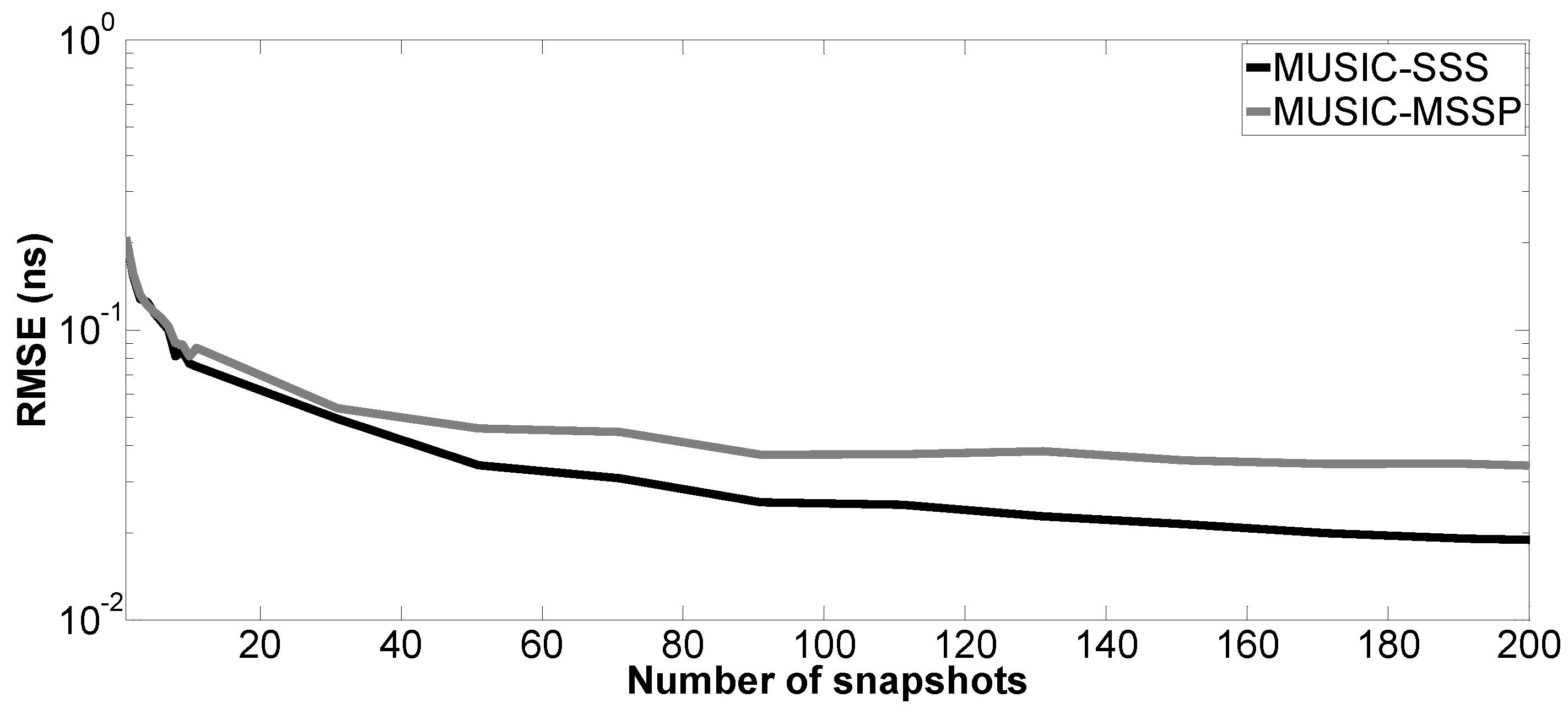
4.1. Simulation Results
- Case a. mm and mm: The received signal is made up of three primary echoes and one multiple echo (one multiple reflection inside the first layer is considered). The corresponding time delays () are ns, ns, ns and ns, respectively. The first three echoes are overlapped.
- Case b. mm and mm: The received signal is made up of three primary echoes. The corresponding time delays () are ns, ns and ns, respectively. The three echoes are overlapped.
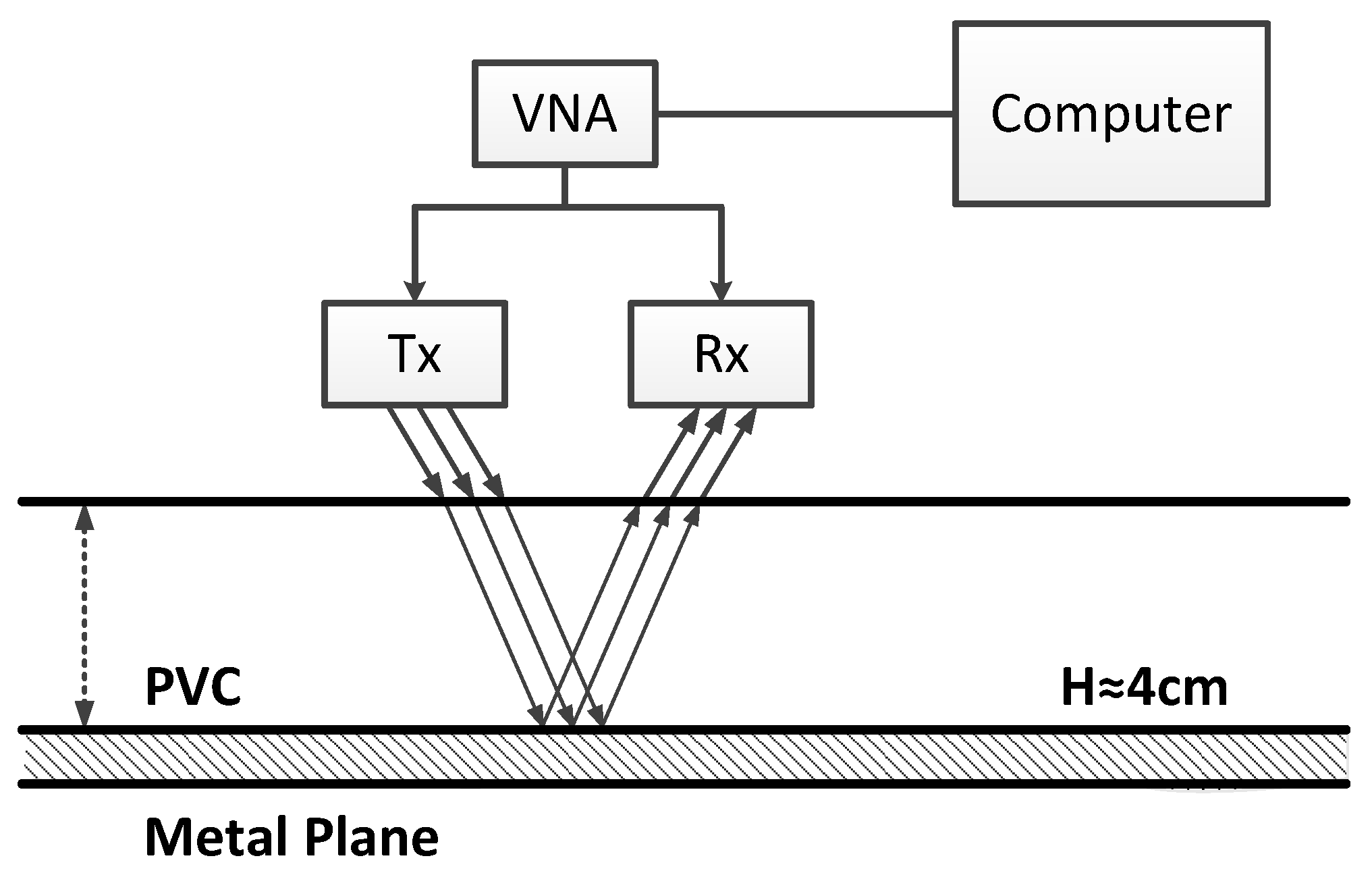
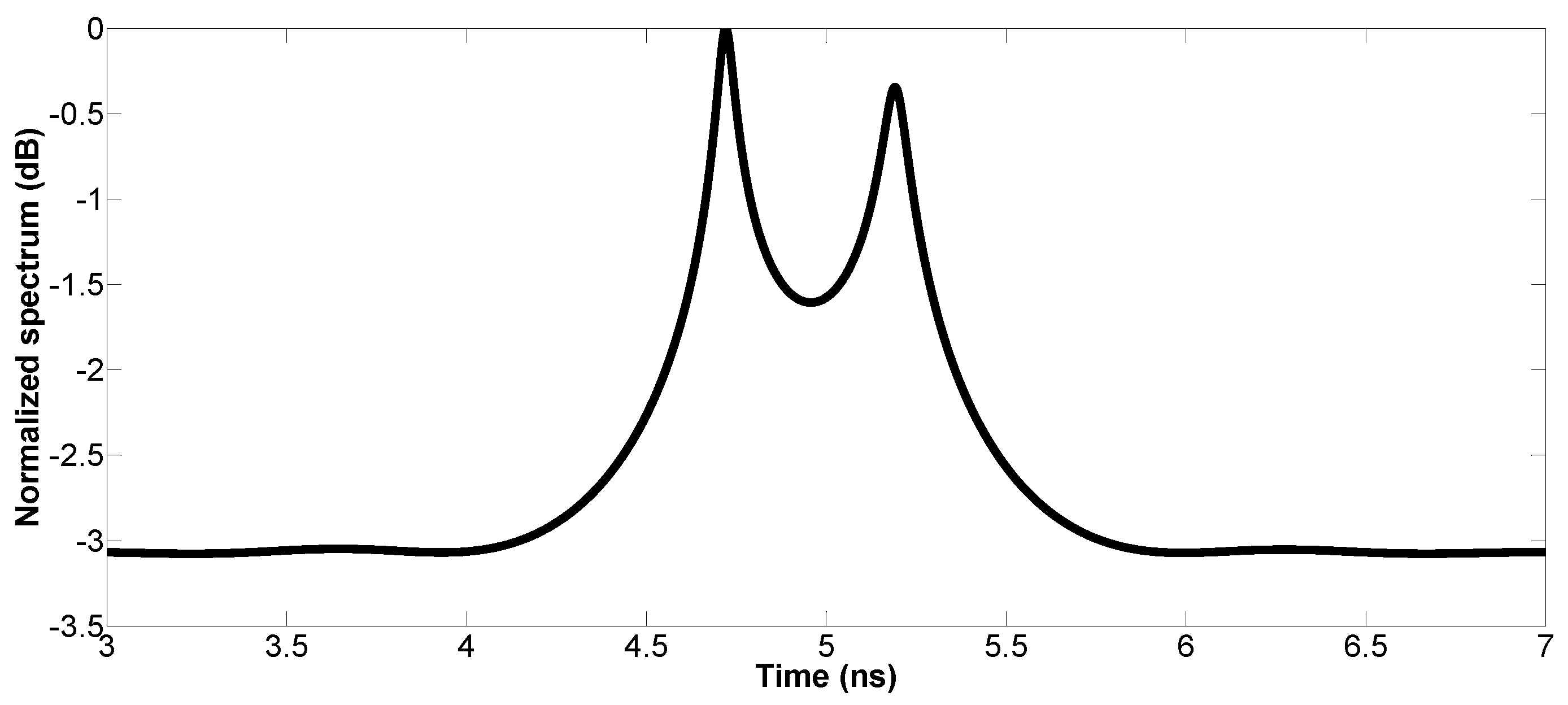
4.2. Experimental Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| TDE | Time Delay Estimation |
| GPR | Ground-Penetrating Radar |
| FFT | Fast Fourier Transform |
| MUSIC | Multiple Signal Classification |
| ESPRIT | Estimation of Signal Parameters via Rational Invariance Technique |
| SSP | Spatial Smoothing Preprocessing |
| MSSP | Modified Spatial Smoothing Preprocessing |
| SSS | Signal Subspace Smoothing |
| EVD | EigenValue Decomposition |
| SNR | Signal-to-Noise Ratio |
| RMSE | Root Mean Square Error |
| VNA | Vector Network Analyzer |
| PVC | PolyVinyl Chloride |
References
- Gedalyahu, K.; Eldar, Y.C. Time-delay estimation from low-rate samples: A union of subspaces approach. IEEE Trans. Signal Process. 2010, 58, 3017–3031. [Google Scholar] [CrossRef]
- Wang, Z.; Li, J.; Wu, R. Time delay and time reversal based robust capon beamformers for ultrasound imaging. IEEE Trans. Med. Imaging 2005, 24, 1308–1322. [Google Scholar] [CrossRef] [PubMed]
- Ge, F.; Shen, D.; Peng, Y.; Li, V.O.K. Super-resolution time delay estimation in multipath environments. IEEE Trans. Circuits Syst. I Regul. Pap. 2007, 54, 1977–1986. [Google Scholar] [CrossRef]
- Spagnolini, U. Permittivity measurements of multilayered media with monostatic pulse radar. IEEE Trans. Geosci. Remote Sens. 1997, 35, 454–463. [Google Scholar] [CrossRef]
- Al-Qadi, I.; Lahouar, S. Measuring layer thicknesses with GPR–theory to practice. Constr. Build. Mater. 2005, 19, 763–772. [Google Scholar] [CrossRef]
- Spagnolini, U.; Rampa, V. Multitarget detection/tracking for monostatic ground penetrating radar: Application to pavement profiling. IEEE Trans. Geosci. Remote Sens. 1999, 37, 383–394. [Google Scholar] [CrossRef]
- Protiva, P.; Mrkvica, J.; Macháč, J. Estimation of wall parameters from time-delay-only through-wall radar measurements. IEEE Trans. Antennas Propag. 2011, 59, 4268–4278. [Google Scholar] [CrossRef]
- Le Bastard, C.; Baltazart, V.; Wang, Y.; Saillard, J. Thin-pavement thickness estimation using gpr with high-resolution and superresolution methods. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2511–2519. [Google Scholar] [CrossRef]
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Devaney, A.J.; Marengo, E.A.; Gruber, F.K. Time-reversal-based imaging and inverse scattering of multiply scattering point targets. J. Acoust. Soc. Am. 2005, 118, 3129–3138. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Romano, G.; Solimene, R. Performance analysis of time-reversal MUSIC. IEEE Trans. Signal Process. 2015, 63, 2650–2662. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Salvo Rossi, P. Noncolocated time-reversal MUSIC: High-SNR distribution of null spectrum. IEEE Signal Process. Lett. 2017, 24, 397–401. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Qu, L.; Sun, Q.; Yang, T.; Zhang, L.; Sun, Y. Time-delay estimation for ground penetrating radar using ESPRIT with improved spatial smoothing technique. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1315–1319. [Google Scholar]
- Sun, M.; Le Bastard, C.; Wang, Y.; Pinel, N. Time-delay estimation using ESPRIT with extended improved spatial smoothing techniques for radar signals. IEEE Geosci. Remote Sens. Lett. 2016, 13, 73–77. [Google Scholar] [CrossRef]
- Pan, J.; Wang, Y.; Le Bastard, C.; Wang, T. DOA Finding with Support Vector Regression Based Forward-Backward Linear Prediction. Sensors 2017, 17, 1225. [Google Scholar] [CrossRef] [PubMed]
- Evans, J.E.; Sun, D.F.; Johnson, J.R. Application of Advanced Signal Processing Techniques to Angle of Arrival Estimation in ATC Navigation and Surveillance Systems; Massachusetts Institute of Technology Lexington Lincoln Laboratory: Lexington, MA, USA, 1982. [Google Scholar]
- Shan, T.J.; Wax, M.; Kailath, T. On spatial smoothing for direction-of-arrival estimation of coherent signals. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 806–811. [Google Scholar] [CrossRef]
- Pillai, S.U.; Kwon, B.H. Forward/backward spatial smoothing techniques for coherent signal identification. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 8–15. [Google Scholar] [CrossRef]
- Williams, R.T.; Prasad, S.; Mahalanabis, A.K.; Sibul, L.H. An improved spatial smoothing technique for bearing estimation in a multipath environment. IEEE Trans. Acoust. Speech Signal Process. 1988, 36, 425–432. [Google Scholar] [CrossRef]
- Du, W.; Kirlin, R.L. Improved spatial smoothing techniques for DOA estimation of coherent signals. IEEE Trans. Signal Process. 1991, 39, 1208–1210. [Google Scholar] [CrossRef]
- Yamada, H.; Ohmiya, M.; Ogawa, Y.; Itoh, K. Superresolution techniques for time-domain measurements with a network analyzer. IEEE Trans. Antennas Propag. 1991, 39, 177–183. [Google Scholar] [CrossRef]
- Weiss, A.J.; Friedlander, B. Performance analysis of spatial smoothing with interpolated arrays. IEEE Trans. Signal Process. 1993, 41, 1881–1892. [Google Scholar] [CrossRef]
- Grenier, D.; Bossé, E. A new spatial smoothing scheme for direction-of-arrivals of correlated sources. Signal Process. 1996, 54, 153–160. [Google Scholar] [CrossRef]
- Fauchard, C. Utilisation de Radars TréS Hautes Fréquences: Application á L’auscultation non Destructive des Chaussées. Ph.D. Thesis, University of Nantes, Nantes, France, 2001. [Google Scholar]
- Daniels, D.J. Ground Penetrating Radar, 1st ed.; IET: London, UK, 2004. [Google Scholar]
- Wu, R.; Li, X.; Li, J. Continuous pavement profiling with ground-penetrating radar. IEE Proc. Radar Sonar Navig. 2002, 149, 183–193. [Google Scholar] [CrossRef]
- Li, J.; Wu, R. An efficient algorithm for time delay estimation. IEEE Trans. Signal Process. 1998, 46, 2231–2235. [Google Scholar]
- Le Bastard, C.; Wang, Y.; Baltazart, V.; Derobert, X. Time delay and permittivity estimation by ground-penetrating radar with support vector regression. IEEE Geosci. Remote Sens. Lett. 2014, 11, 873–877. [Google Scholar] [CrossRef]
- Radoi, E.; Quinquis, A. A new method for estimating the number of harmonic components in noise with application in high resolution radar. EURASIP J. Appl. Signal Process. 2004, 2004, 1177–1188. [Google Scholar] [CrossRef]
- Stoica, P.; Moses, R.L. Introduction to Spectral Analysis, 1st ed.; Prentice Hall, Inc.: Upper Saddle River, NJ, USA, 1997. [Google Scholar]














© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, M.; Wang, Y.; Le Bastard, C.; Pan, J.; Ding, Y. Signal Subspace Smoothing Technique for Time Delay Estimation Using MUSIC Algorithm. Sensors 2017, 17, 2868. https://doi.org/10.3390/s17122868
Sun M, Wang Y, Le Bastard C, Pan J, Ding Y. Signal Subspace Smoothing Technique for Time Delay Estimation Using MUSIC Algorithm. Sensors. 2017; 17(12):2868. https://doi.org/10.3390/s17122868
Chicago/Turabian StyleSun, Meng, Yide Wang, Cédric Le Bastard, Jingjing Pan, and Yuehua Ding. 2017. "Signal Subspace Smoothing Technique for Time Delay Estimation Using MUSIC Algorithm" Sensors 17, no. 12: 2868. https://doi.org/10.3390/s17122868
APA StyleSun, M., Wang, Y., Le Bastard, C., Pan, J., & Ding, Y. (2017). Signal Subspace Smoothing Technique for Time Delay Estimation Using MUSIC Algorithm. Sensors, 17(12), 2868. https://doi.org/10.3390/s17122868