Low Cost Plastic Optical Fiber Pressure Sensor Embedded in Mattress for Vital Signal Monitoring



Abstract
:1. Introduction
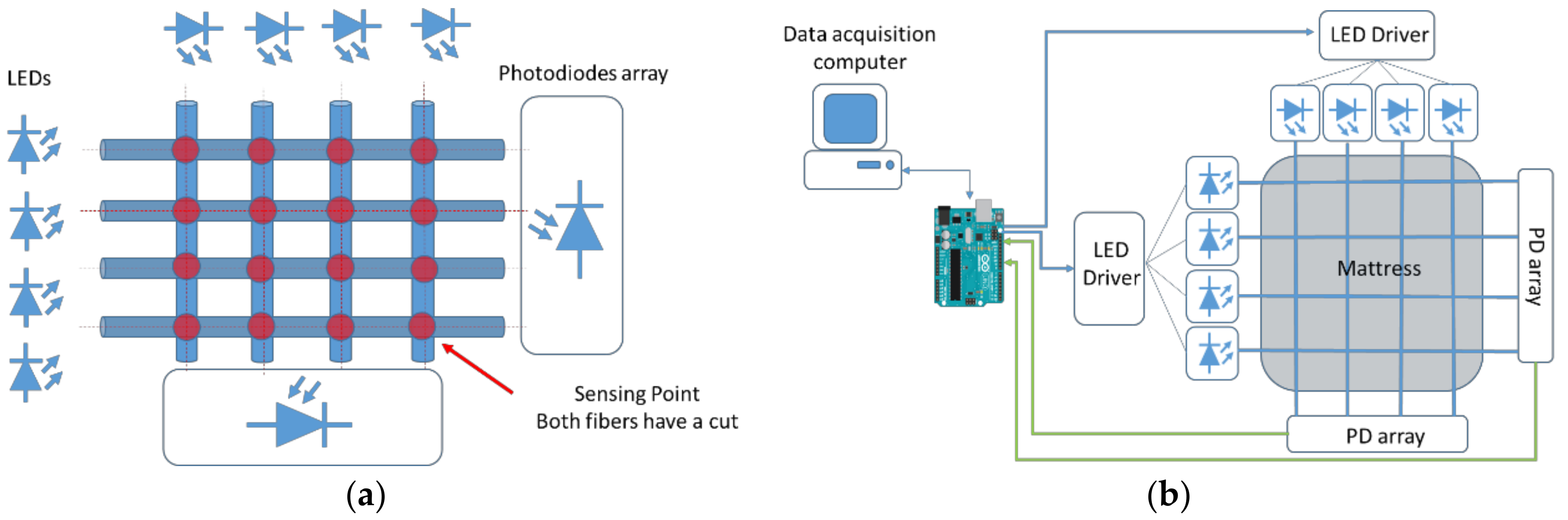
2. Principle of Operation
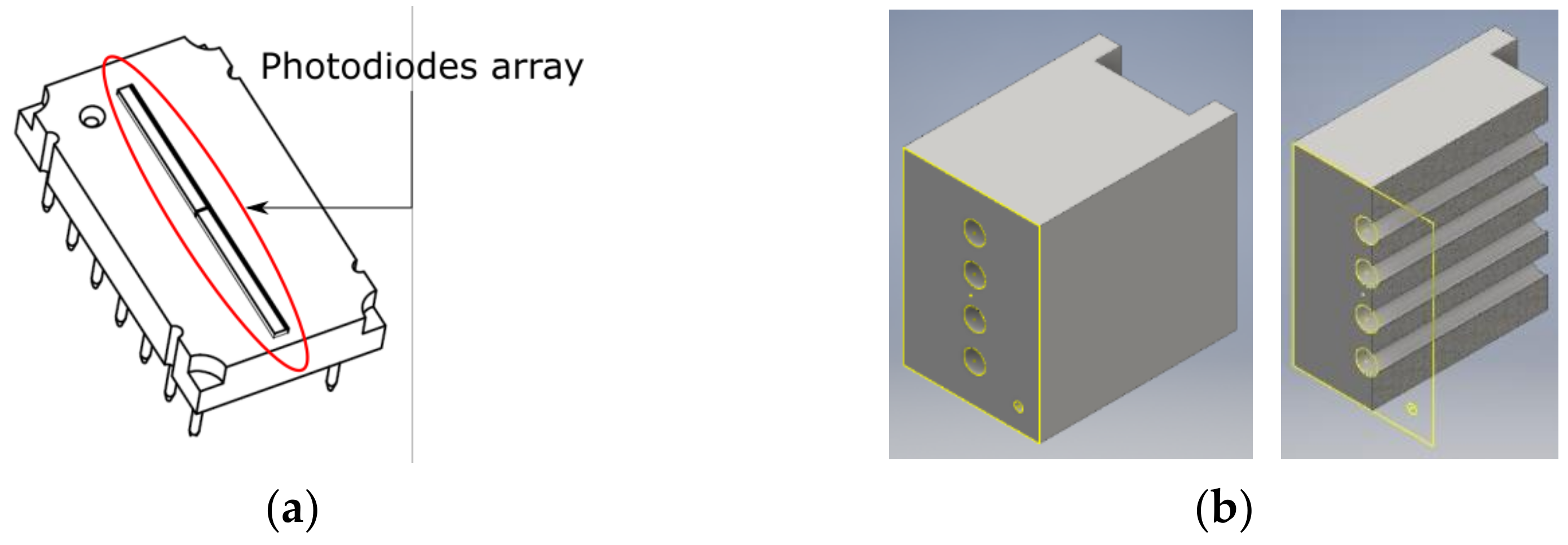
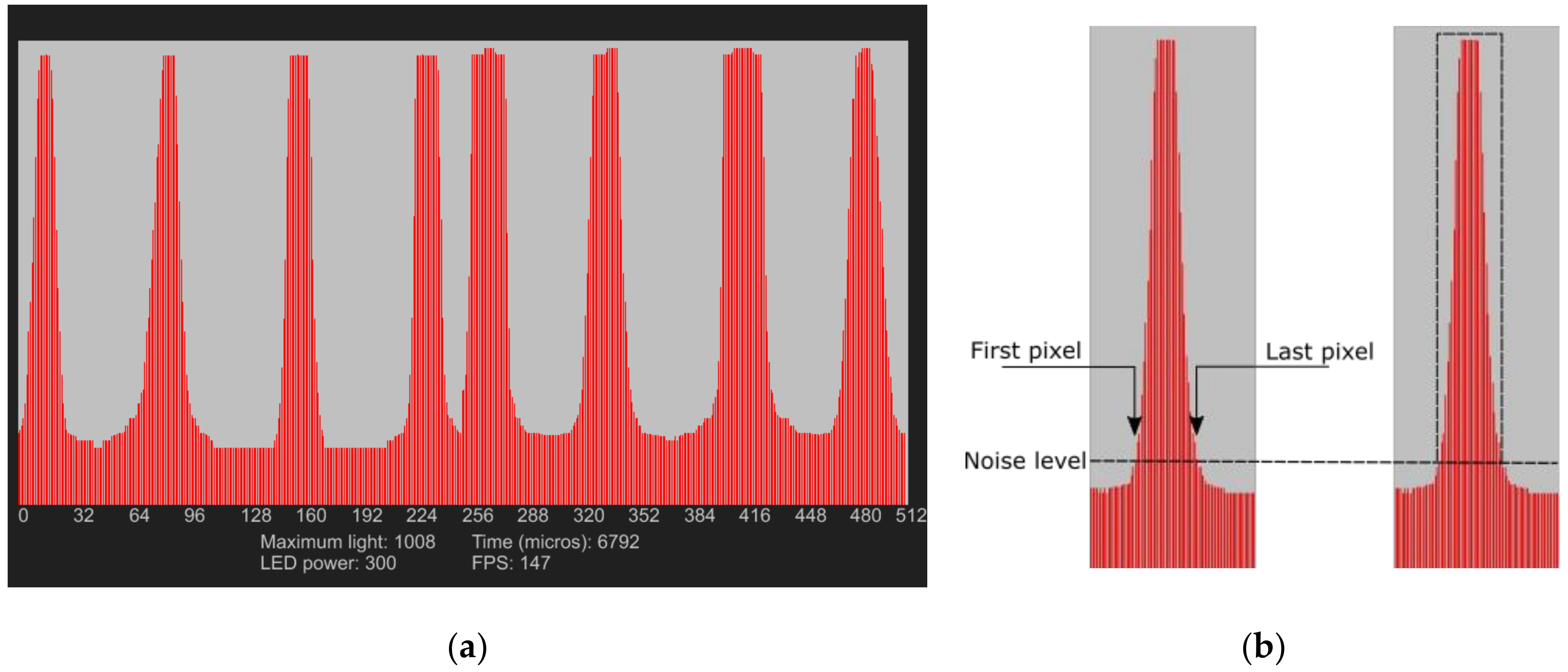
3. Sensor Implementation
4. Measurements and Discussion
4.1. Force Measurements
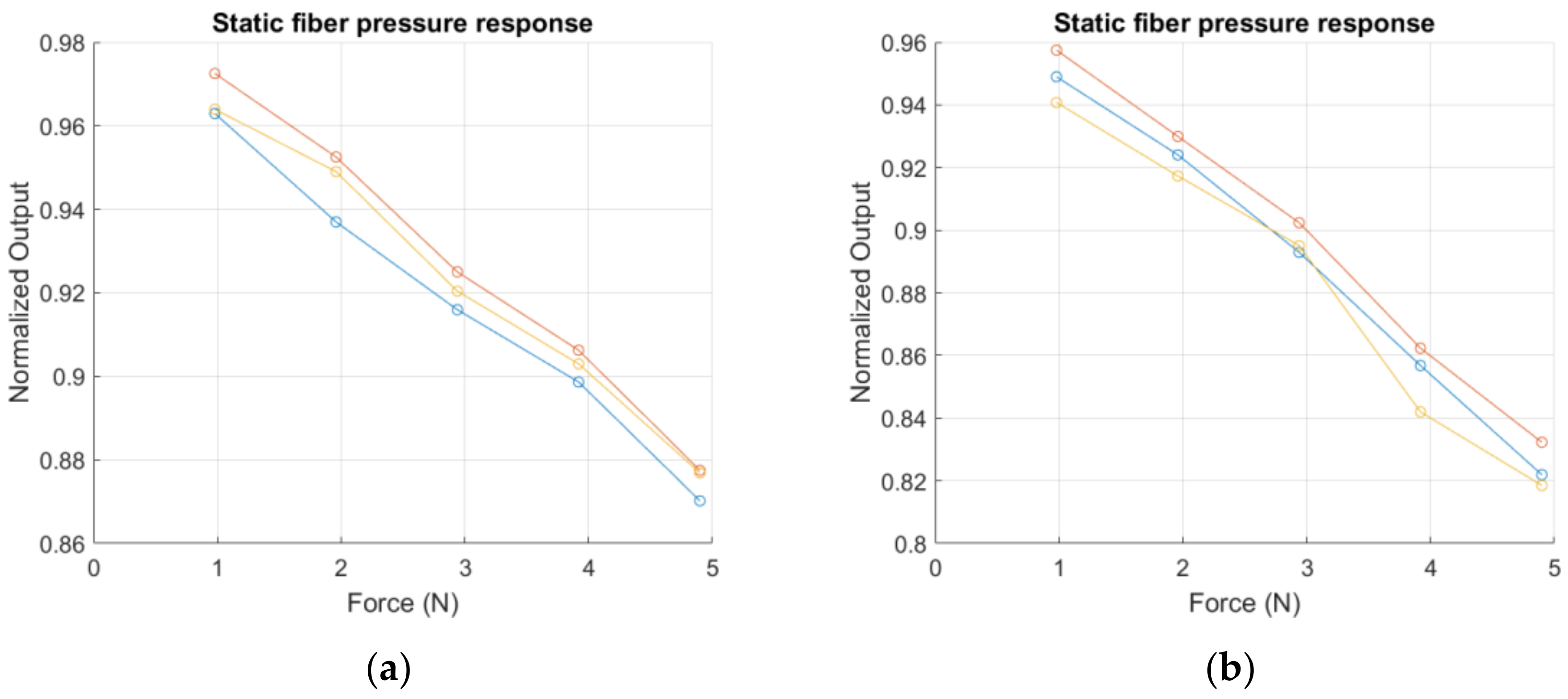
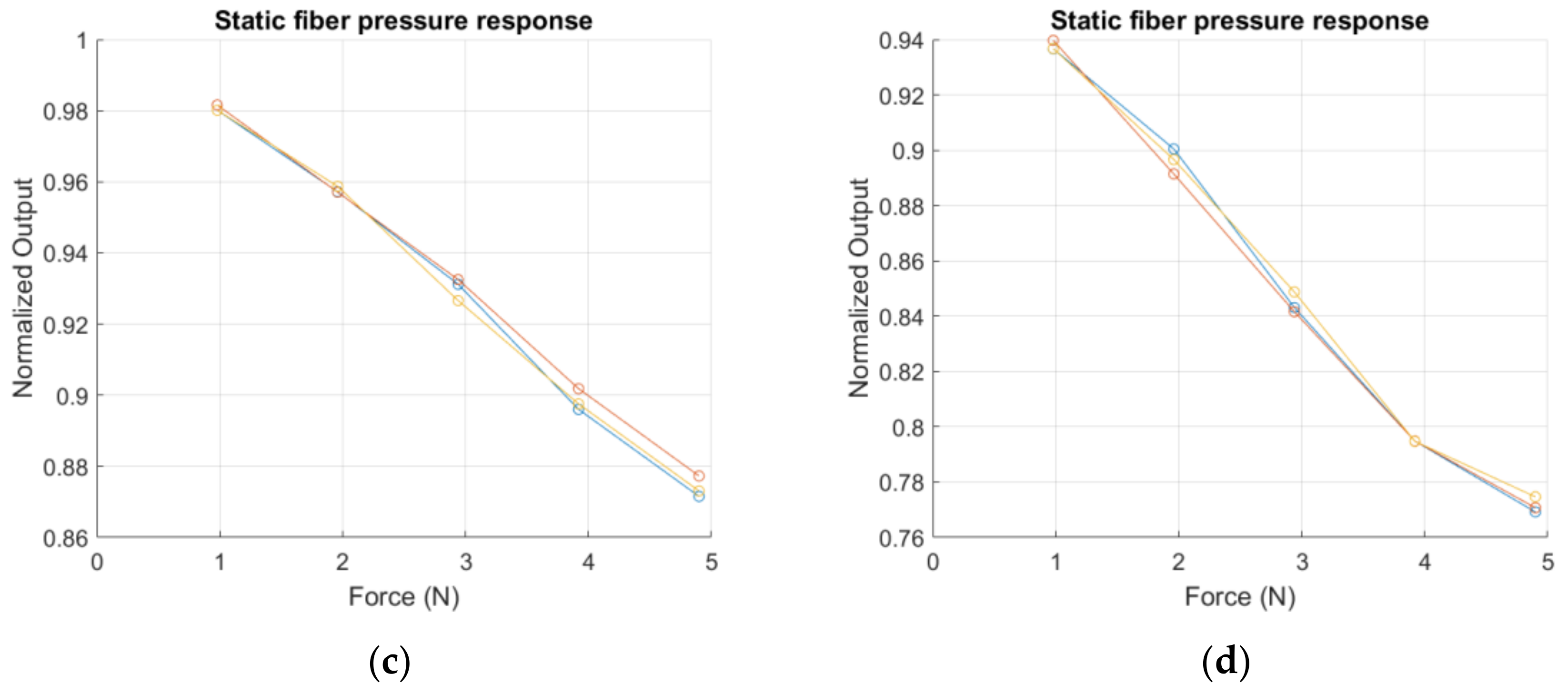
- The first static test was made placing weights in a range 0–500 g (0–4.9 N) with step of 100 g (force = 0.98 N) on the sensitive points of the matrix.
- The second test is a dynamic test: a force step stimulus was applied on a point of the mattress sensor. From the time response data, the frequency response was obtained operating the Fourier transform.
- The third is a cyclic loading test.
4.2. Static Measurement
4.3. Frequency Response
4.4. Loading Cycles
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Majumder, M.; Gangopadhyay, T.K.; Chakraborty, A.K.; Dasgupta, K.; Bhattacharya, D.K. Fibre Bragg gratings in structural health monitoring—Present status and applications. Sens. Actuators A: Phys. 2008, 147, 150–164. [Google Scholar] [CrossRef]
- Grillet, A.; Kinet, D.; Witt, J.; Schukar, M.; Krebber, K.; Pirotte, F.; Depre, A. Optical fiber sensors embedded into medical textiles for healthcare monitoring. IEEE Sens. J. 2008, 8, 1215–1222. [Google Scholar] [CrossRef]
- Morris, D.; Schazmann, B.; Wu, Y.; Coyle, S.; Brady, S.; Fay, C.; Hayes, J.; Lau, K.T.; Wallace, G.; Diamond, D. Wearable technology for bio-chemical analysis of body fluids during exercise. In Proceedings of the 30th Annual International Conference of the Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–25 August 2008. [Google Scholar]
- Coyle, S.; Lau, K.T.; Moyna, N.; O’Gorman, D.; Diamond, D.; Di Francesco, F.; Costanzo, D.; Salvo, P.; Trivella, M.G.; De Rossi, D.E.; et al. BIOTEX—Biosensing textiles for personalised healthcare management. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 364–370. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sazonov, E.S.; Fulk, G.; Hill, J.; Schutz, Y.; Browning, R. Monitoring of posture allocations and activities by a shoe-based wearable sensor. IEEE Trans. Biomed. Eng. 2011, 58, 983–990. [Google Scholar] [CrossRef] [PubMed]
- Yoon, S.; Sim, J.K.; Cho, Y.-H. A Flexible and Wearable Human Stress Monitoring Patch. Sci. Rep. 2016, 6, 23468. [Google Scholar] [CrossRef] [PubMed]
- Zhu, C.; Sheng, W. Wearable sensor-based hand gesture and daily activity recognition for robot-assisted living. IEEE Trans. Syst. Man Cybern.-Part A Syst. Hum. 2011, 41, 569–573. [Google Scholar] [CrossRef]
- De Jonckheere, J.; Jeanne, M.; Grillet, A.; Weber, S.; Chaud, P.; Logier, R.; Weber, J.L. OFSETH: Optical fibre embedded into technical textile for healthcare, an efficient way to monitor patient under magnetic resonance imaging. In Proceedings of the 29th Annual International Conference of the Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007. [Google Scholar]
- Mohr, B.; Beckers, M. Textile Integration of POF for lighting applications. In Proceedings of the Conference Proceedings: 25th International Conference on Plastic Optical Fibres; Aston University: Birmingham, UK, 2016. [Google Scholar]
- Zhao, H.; O’Brien, K.; Li, S.; Shepherd, R.F. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides. Sci. Robot. 2016, 1, eaai7529. [Google Scholar]
- Lomer, M.; Arrue, J.; Jauregui, C.; Aiestaran, P.; Zubia, J.; López-Higuera, J.M. Lateral polishing of bends in plastic optical fibres applied to a multipoint liquid-level measurement sensor. Sens. Actuators A Phys. 2007, 137, 68–73. [Google Scholar] [CrossRef]
- Kulkarni, A.; Na, J.; Kim, Y.J.; Baik, S.; Kim, T. An evaluation of the optical fiber beam as a force sensor. Opt. Fiber Technol. 2009, 15, 131–135. [Google Scholar] [CrossRef]
- Moraleda, A.T.; García, C.V.; Zaballa, J.Z.; Arrue, J. A temperature sensor based on a polymer optical fiber macro-bend. Sensors 2013, 13, 13076–13089. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stupar, D.Z.; Bajic, J.S.; Manojlovic, L.M.; Slankamenac, M.P.; Joza, A.V.; Zivanov, M.B. Wearable low-cost system for human joint movements monitoring based on fiber-optic curvature sensor. IEEE Sens. J. 2012, 12, 3424–3431. [Google Scholar] [CrossRef]
- Dunne, L.E.; Walsh, P.; Smyth, B.; Caulfield, B. Design and evaluation of a wearable optical sensor for monitoring seated spinal posture. In Proceedings of the 2006 10th IEEE International Symposium on Wearable Computers, Montreux, Switzerland, 11–14 October 2006. [Google Scholar]
- Mitachi, S.; Shiroishi, D.; Nakagawa, M.; Satoh, K. Development of a sleep apnea syndrome sensor using optical fibers. In Proceedings of the 20th Annual Meeting of the Lasers and Electro-Optics Society, Lake Buena Vista, FL, USA, 21–25 October 2007. [Google Scholar]
- Nam, Y.; Kim, Y.; Lee, J. Sleep monitoring based on a tri-axial accelerometer and a pressure sensor. Sensors 2016, 16, 750. [Google Scholar] [CrossRef] [PubMed]
- Gullo, C. Bam Lab: Mattress Monitor for Heart Rate, Sleep Apnea. Available online: http://www.mobihealthnews.com/14561/bam-lab-mattress-monitor-for-heart-rate-sleep-apnea (accessed on 19 October 2017).
- Beddit. Available online: https://www.beddit.com/ (accessed on 19 October 2017).
- Babchenko, A.; Maryles, J. Graded-index plastic optical fiber for deformation sensing. Opt. Lasers Eng. 2007, 45, 757–760. [Google Scholar] [CrossRef]
- Kuang, K.S.C.; Cantwell, W.J.; Scully, P.J. An evaluation of a novel plastic optical fibre sensor for axial strain and bend measurements. Meas. Sci. Technol. 2002, 13, 1523. [Google Scholar] [CrossRef]
- Grassini, S.; Ishtaiwi, M.; Parvis, M.; Vallan, A. Design and deployment of low-cost plastic optical fiber sensors for gas monitoring. Sensors 2014, 15, 485–498. [Google Scholar] [CrossRef] [PubMed]
- Whitmore, M.; Boyer, J.; Holubec, K. Man-Systems Integration Standards Volume I, Section 3. In NASA-STD-3001, Space Flight Human-System Standard and the Human Integration Design Handbook; NASA: Washington, DC, USA, 2008; Volume 276, pp. 32–79. [Google Scholar]
- Zhang, Z.; Bao, X. Distributed optical fiber vibration sensor based on spectrum analysis of Polarization-OTDR system. Opt. Express 2008, 16, 10240–10247. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
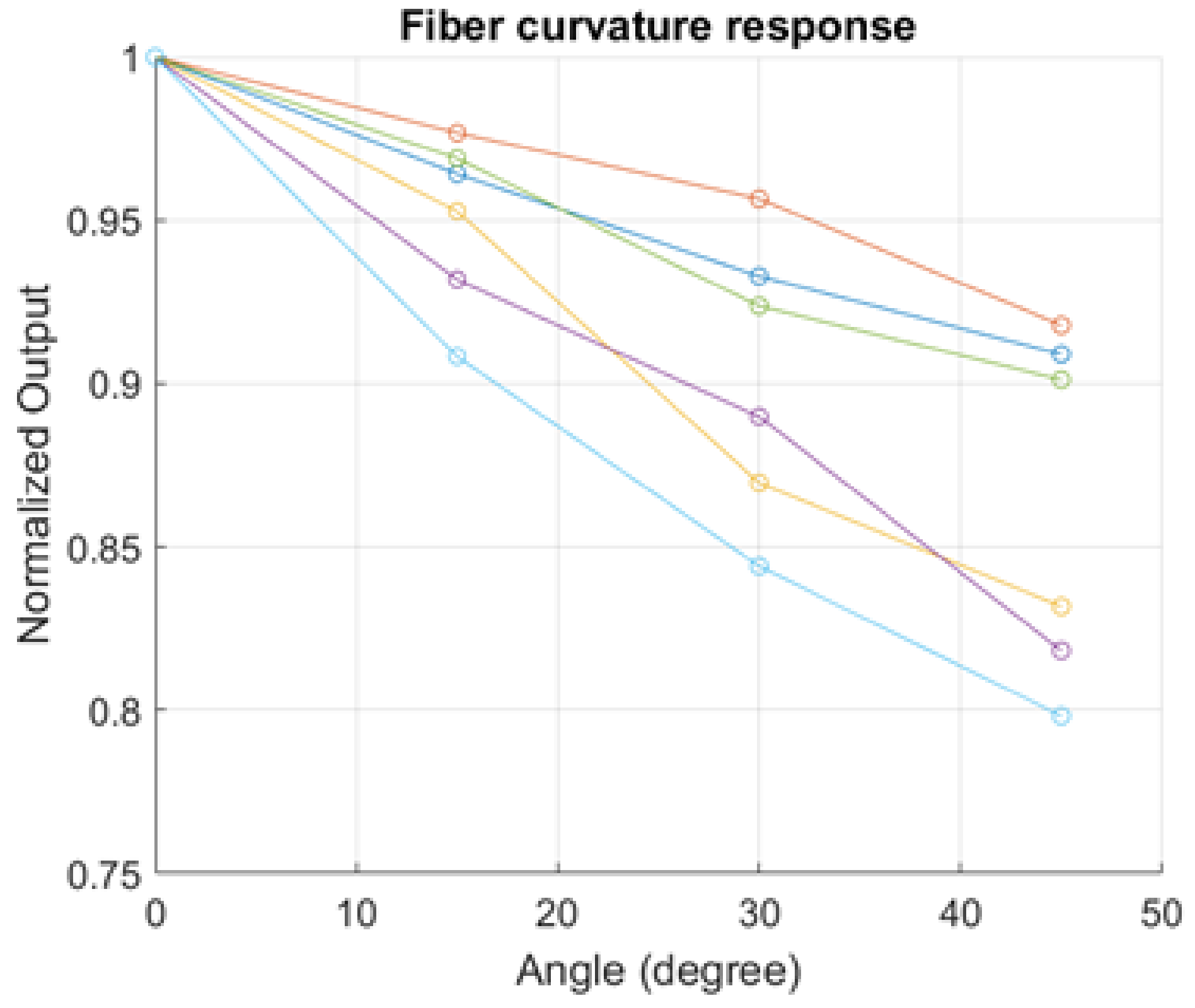
| Angle | Normalized Response ± Standard Deviation |
|---|---|
| 15° | 0.9452 ± 0.0251 |
| 30° | 0.8920 ± 0.0370 |
| 45° | 0.8516 ± 0.0503 |
| Sensitive Point | Repetition | Alpha | Beta | R2 | Sensitive Point | Repetition | Alpha | Beta | R2 |
|---|---|---|---|---|---|---|---|---|---|
| (a) | 1 | −0.02283 | 0.98405 | 99.40% | (b) | 1 | −0.03279 | 0.98531 | 99.50% |
| 2 | −0.02411 | 0.99762 | 99.60% | 2 | −0.03244 | 0.99224 | 99.50% | ||
| 3 | −0.02246 | 0.98868 | 99.20% | 3 | −0.03263 | 0.97864 | 97.40% | ||
| (c) | 1 | −0.02840 | 1.01070 | 99.50% | (d) | 1 | −0.04494 | 0.98100 | 98.70% |
| 2 | −0.02692 | 1.00920 | 99.80% | 2 | −0.04433 | 0.97798 | 98.70% | ||
| 3 | −0.02809 | 1.00980 | 99.70% | 3 | −0.04346 | 0.97809 | 98.50% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sartiano, D.; Sales, S. Low Cost Plastic Optical Fiber Pressure Sensor Embedded in Mattress for Vital Signal Monitoring. Sensors 2017, 17, 2900. https://doi.org/10.3390/s17122900
Sartiano D, Sales S. Low Cost Plastic Optical Fiber Pressure Sensor Embedded in Mattress for Vital Signal Monitoring. Sensors. 2017; 17(12):2900. https://doi.org/10.3390/s17122900
Chicago/Turabian StyleSartiano, Demetrio, and Salvador Sales. 2017. "Low Cost Plastic Optical Fiber Pressure Sensor Embedded in Mattress for Vital Signal Monitoring" Sensors 17, no. 12: 2900. https://doi.org/10.3390/s17122900
APA StyleSartiano, D., & Sales, S. (2017). Low Cost Plastic Optical Fiber Pressure Sensor Embedded in Mattress for Vital Signal Monitoring. Sensors, 17(12), 2900. https://doi.org/10.3390/s17122900