
A Modified Azimuth Weighting Method in a Two-Step Process Approach for Sliding Spotlight Data Processing

Abstract
:1. Introduction
2. Signal Characteristics Analysis
2.1. Imaging Geometry
2.2. Properties of the Echo Signal
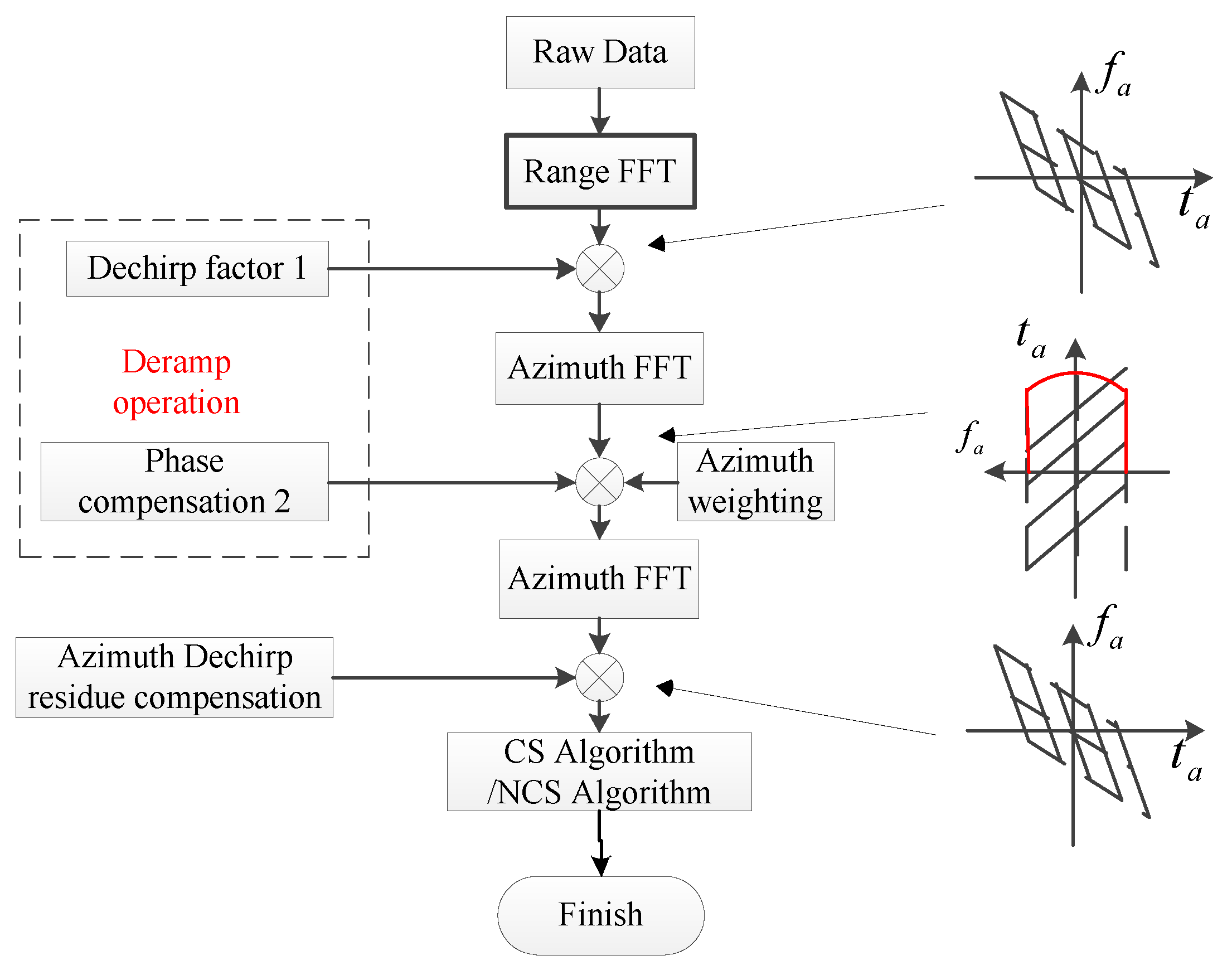
3. Precious Azimuth Weighting Method in a Two-Step Algorithm
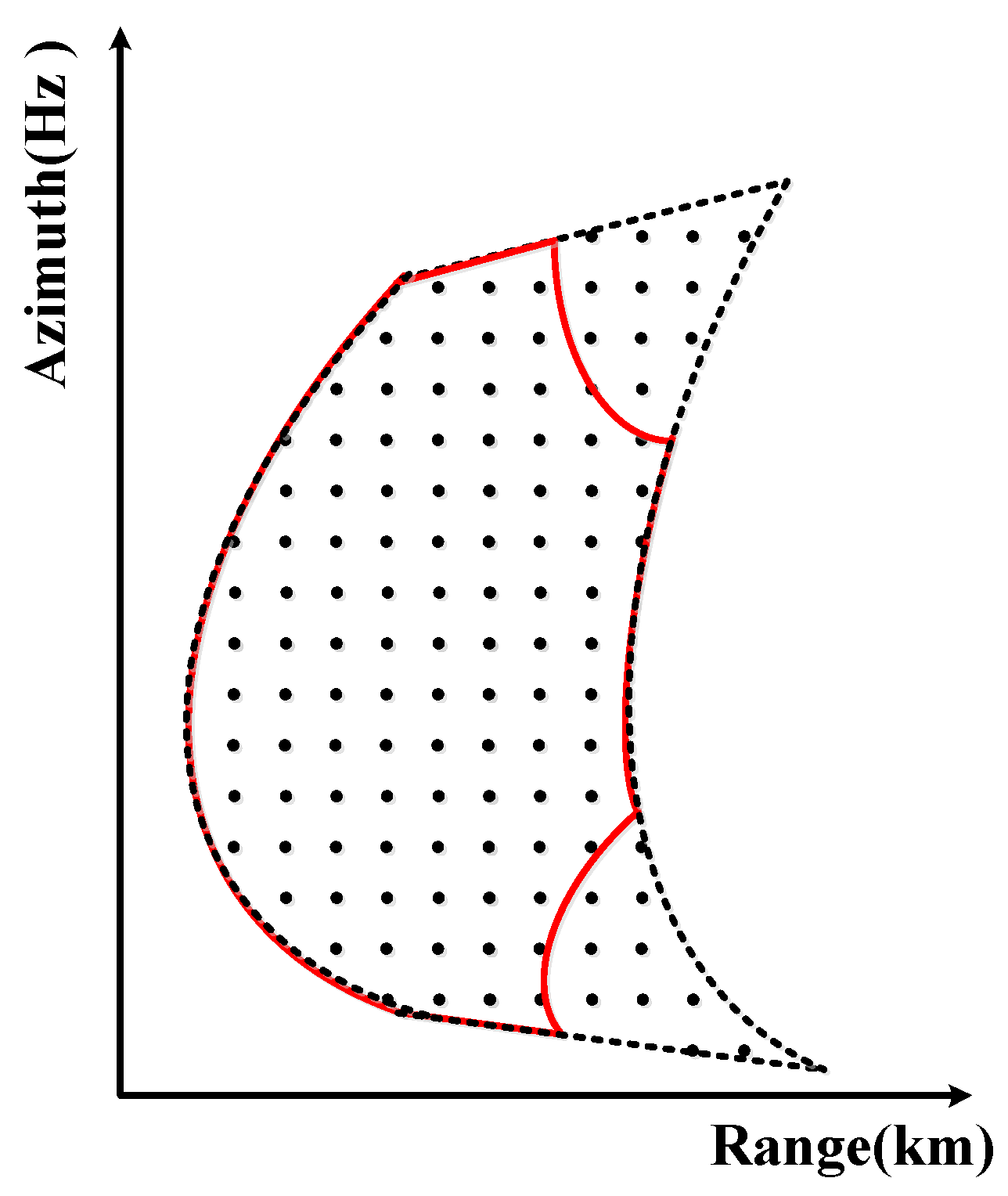
3.1. Azimuth Preprocessing and Weighting Method
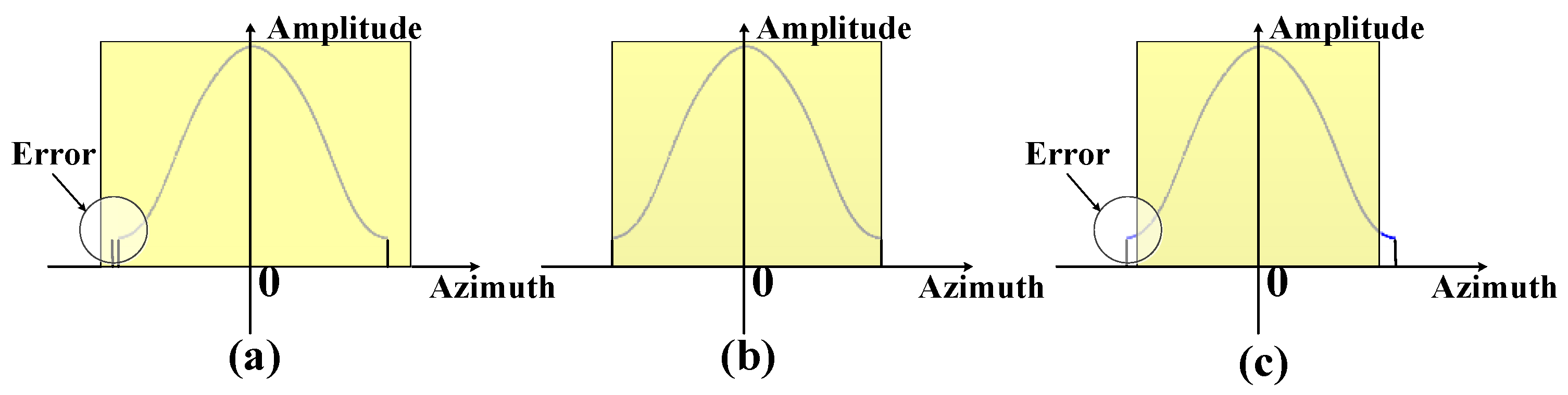
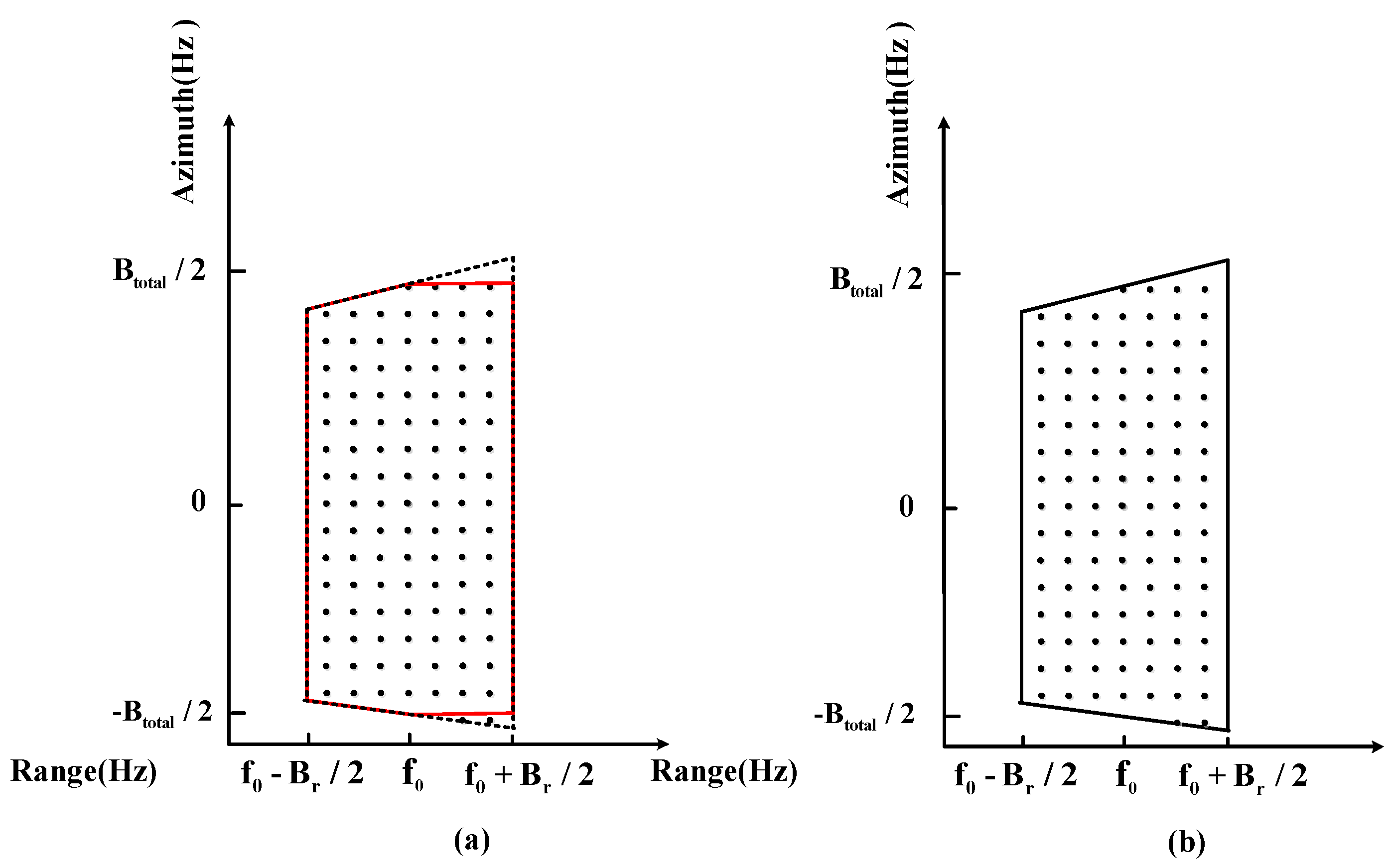
3.2. The Comparison of the Former Weighting Method and Proposed Weighting Method
3.2.1. Weighting and Conducting a Deramping Operation in the Range Time Domain
3.2.2. Weighting and Conducting a Deramping Operation in the Range Frequency Domain
4. Experimental Results
4.1. Weighting and Conducting a Deramping Operation in the Range Time Domain
4.2. Weighting and Conducting a Deramping Operation in the Range Frequency Domain
4.3. The Simulation at 0.3 m Resolution
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lanari, R.; Zoffoli, S.; Sansosti, E.; Fornaro, G.; Serafino, F. New Approach for Hybrid Strip-map/Spotlight SAR Data Focusing. IEEE Proc. Radar Sonar Navig. 2001, 148, 363–372. [Google Scholar] [CrossRef]
- Lanari, R.; Franceschetti, P.; Tesauro, M.; Sansosti, E. Spotlight SAR Image Generation Based on Strip Mode Focusing Techniques. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), New York, NY, USA, 28 June–2 July 1999; pp. 1761–1763.
- Belcher, D.P.; Baker, C.J. High Resolution Processing of Hybrid Stripmap/Spotlight Mode SAR. Proc. Inst. Elect. Eng. Radar Sonar Navig. 1996, 143, 366–374. [Google Scholar] [CrossRef]
- Prats-Iraola, P.; Scheiber, R.; Rodriguez-Cassola, M.; Mittermayer, J. On the Processing of Very High Resolution Spaceborne SAR Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6003–6016. [Google Scholar] [CrossRef]
- Carrara, W.G.; Majewski, R.M.; Goodman, R.S. Spotlight Synthetic Apecture Radar: Signal Processing Algorithms; Artech House: Norwood, MA, USA, 1995. [Google Scholar]
- Mittermayer, J.; Lord, R.; Borner, E. Sliding Spotlight SAR Processing for TerraSAR-X Using a New Formulation of the Extended Chirp Scaling Algorithm. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium(IGARSS), Toulouse, France, 21–25 July 2003; pp. 1462–1464.
- Lanari, R.; Tesauro, M.; .Sansosti, E.; Fornaro, G. Spotlight SAR Data Focusing Based on a Two-Step Processing Approach. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1993–2003. [Google Scholar] [CrossRef]
- Mittermayer, J.; Moreira, A.; Loffeld, O. Spotlight SAR Data Processing Using the Frequency Scaling Algorithm. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2198–2214. [Google Scholar] [CrossRef]
- Wu, Y.; Sun, G.C.; Yang, C.; Yang, J.; Xing, M.D.; Bao, Z. Processing of Very High Resolution Spaceborne Sliding Spotlight SAR Data Using Velocity Scaling. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1505–1518. [Google Scholar] [CrossRef]
- Fornaro, G.; Lanari, R.; .Sansosti, E.; Tesauro, M. A Two-step Spotlight SAR Data Focusing Approach. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 24–28 July 2000; pp. 84–86.
- Liu, F.F.; Ding, Z.G.; Zeng, T.; Long, T. Performance Analysis of Two-Step Algorithm in Sliding Spotlight Space-borne SAR. In Proceedings of the IEEE Radar Conference, Arlington, TX, USA, 10–14 May 2010; pp. 965–968.
- Kuang, H.; Chen, J.; Yang, W. A refined two-step algorithm for high resolution spaceborne SAR with squinted sliding spotlight mode. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milano, Italy, 26–31 July 2015; pp. 4476–4479.
- Stangl, M.; Werninghaus, R.; Schweizer, B.; Fischer, C. TerraSAR-X Technologies and First Results. IEEE Proc. Radar Sonar Navig. 2006, 153, 86–95. [Google Scholar] [CrossRef]
- Wang, P.B.; Zhou, Y.Q.; Chen, J.; Li, C.S.; Yu, Z.; Min, H. A Deramp Frequency Scaling Algorithm for Processing Space-Borne Spotlight SAR Data. In Proceedings of the IEEE International Symposium on Geoscience and Remote Sensing, Denver, CO, USA, 31 July–4 August 2006; pp. 3148–3151.
- Yang, W.; Li, C.S.; Chen, J.; Wang, P.B. Extended three-step focusing algorithm for sliding spotlight and tops data image formation. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, BC, Canada, 24–29 July 2011; pp. 479–482.
- Buckreuss, S.; Werninghaus, R.; Pitz, W. The German Satellite Mission TerraSAR-X. IEEE Aerosp. Electron. Syst. Mag. 2009, 24, 4–9. [Google Scholar] [CrossRef]
- Mora, O.; Granda, J.; Biescas, E.; Urdiroz, A. TerraSAR-X High Resolution SAR Data: Ground Motion and Mapping Applications for Infrastructure, Oil & Gas and Public Health Domain. In Proceedings of the European Conference on Synthetic Aperture Radar (EUSAR), Friedrichshafen, Germany, 2–5 June 2008; pp. 1–4.
- Breit, H.; Fritz, T.; Balss, U.; Lachaise, M. TerraSAR-X SAR Processing and Products. IEEE Trans. Geosci. Remote Sens. 2010, 48, 727–740. [Google Scholar] [CrossRef]
- Boerner, E.; Lord, R.; Mittermayer, J.; Bamler, R. Evaluation of TerraSAR-X Spotlight Processing Accuracy Based on a New Spotlight Raw Data Simulator. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Toulouse, France, 21–25 July 2003; pp. 1323–1325.
- Prats, P.; Scheiber, R.; Mittermayer, J.; Meta, A.; Moreira, A. Processing of Sliding Spotlight and TOPS SAR Data Using Baseband Azimuth Scaling. IEEE Trans. Geosci. Remote Sens. 2010, 48, 770–780. [Google Scholar] [CrossRef]
- Mittermayer, J.; Moreira, A.; Loffeld, O. Spotlight Processing of Wide-Beam Stripmap SAR Data Using the Frequency Scaling Algorithm. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Seattle, WA, USA, 6–10 July 1998; pp. 1177–1179.
- Desai, M.D.; Jenkins, W.K. Convolution Backprojection Image Reconstruction for Spotlight Mode Synthetic Aperture Radar. IEEE Trans. Image Proc. 1992, 1, 505–517. [Google Scholar] [CrossRef] [PubMed]
- Yegulalp, A.F. Fast Backprojection Algorithm for Synthetic Aperture Radar. In Proceedings of the Record of the 1999 IEEE Radar Conference, Waltham, MA, USA, 20–24 April 1999; pp. 60–65.
- Zhang, L.; Li, H.-L.; Qiao, Z.-J.; Xu, Z.-W. A Fast BP Algorithm with Wavenumber Spectrum Fusion for High-Resolution Spotlight SAR Imaging. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1460–1464. [Google Scholar] [CrossRef]
- Gaibel, A.; Boag, A. Back-projection SAR imaging using FFT. In Proceedings of the European Radar Conference (EuRAD), London, UK, 5–7 October 2016; pp. 69–72.
- Shu, B.Z.; Xu, Y.H.; Ding, Z.G.; Zhu, Y. An Azimuth Weighting Method of Slide-spotlight SAR Based on Subaperture Chirp Scaling Algorithm. In Proceedings of the IET International Radar Conference, Hangzhou, China, 14–16 October 2015; pp. 1–5.
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Raney, K.; Runge, H.; Bamler, R.; Cumming, I.; Wong, F. Precision SAR Processing Using Chirp Scaling. IEEE Trans. Geosci. Remote Sens. 1994, 32, 786–799. [Google Scholar] [CrossRef]
- Davidson, G.W.; Cumming, I.G.; Ito, M.R. A Chirp Scaling Approach for Processing Squint Mode SAR Data. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 121–133. [Google Scholar] [CrossRef]
- An, D.X.; Huang, X.T.; Jin, T.; Zhou, Z.M. Extended Nonlinear Chirp Scaling Algorithm for High-Resolution Highly Squint SAR Data Focusing. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3595–3609. [Google Scholar] [CrossRef]
- Sun, G.C.; Jiang, X.W.; Xing, M.D.; Qiao, Z.J.; Wu, Y.R.; Bao, Z. Focus Improvement of Highly Squinted Data Based on Azimuth Nonlinear Scaling. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2308–2322. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Carrier frequency | 5.4 GHz |
| Looking angle | 26° |
| PRF | 4912 Hz |
| Azimuth Beam width | 0.47° |
| Pulse bandwidth | 1028 MHz |
| Effective velocity | 7089 m/s |
| Weighting Method | Azimuth | Range | ||||
|---|---|---|---|---|---|---|
| PSLR (dB) | ISLR (dB) | ρa (m) | PSLR (dB) | ISLR (dB) | ρr (m) | |
| a | −20.05 | −19.36 | 0.370 | −22.62 | −19.40 | 0.167 |
| b | −24.50 | −20.01 | 0.358 | −25.11 | −20.37 | 0.154 |
| c | −24.90 | −20.09 | 0.352 | −25.26 | −21.25 | 0.154 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, F.; Ding, Z.-g.; Xiong, B.; Long, T. A Modified Azimuth Weighting Method in a Two-Step Process Approach for Sliding Spotlight Data Processing. Sensors 2017, 17, 220. https://doi.org/10.3390/s17020220
Xiao F, Ding Z-g, Xiong B, Long T. A Modified Azimuth Weighting Method in a Two-Step Process Approach for Sliding Spotlight Data Processing. Sensors. 2017; 17(2):220. https://doi.org/10.3390/s17020220
Chicago/Turabian StyleXiao, Feng, Ze-gang Ding, Bin Xiong, and Teng Long. 2017. "A Modified Azimuth Weighting Method in a Two-Step Process Approach for Sliding Spotlight Data Processing" Sensors 17, no. 2: 220. https://doi.org/10.3390/s17020220
APA StyleXiao, F., Ding, Z. -g., Xiong, B., & Long, T. (2017). A Modified Azimuth Weighting Method in a Two-Step Process Approach for Sliding Spotlight Data Processing. Sensors, 17(2), 220. https://doi.org/10.3390/s17020220