
Detectability Analysis of Road Vehicles in Radarsat-2 Fully Polarimetric SAR Images for Traffic Monitoring


Abstract
:1. Introduction
2. SAR Images and Road Vehicles
2.1. Radarsat-2 FP SAR Images
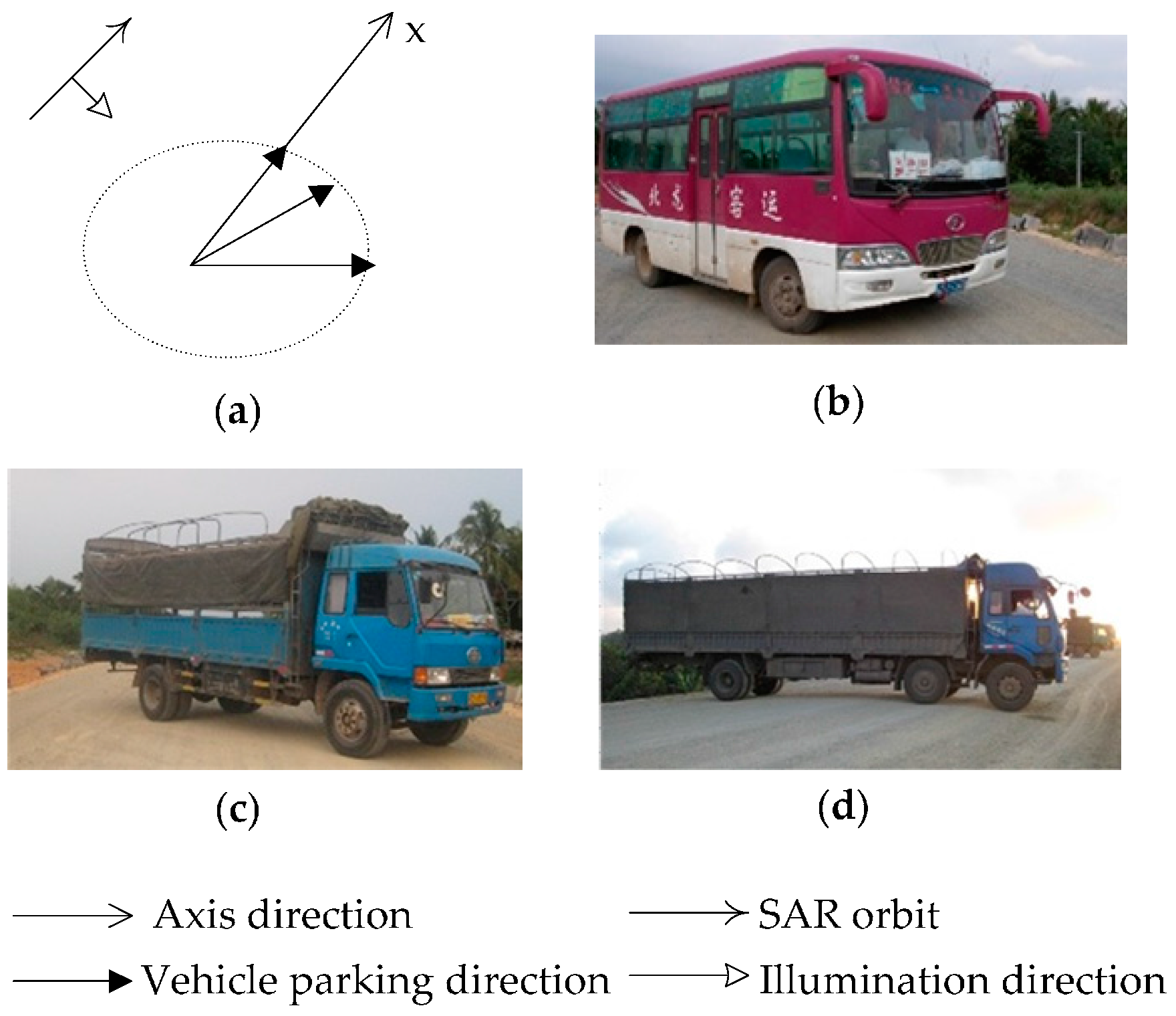
2.2. Road Vehicles
3. Methods
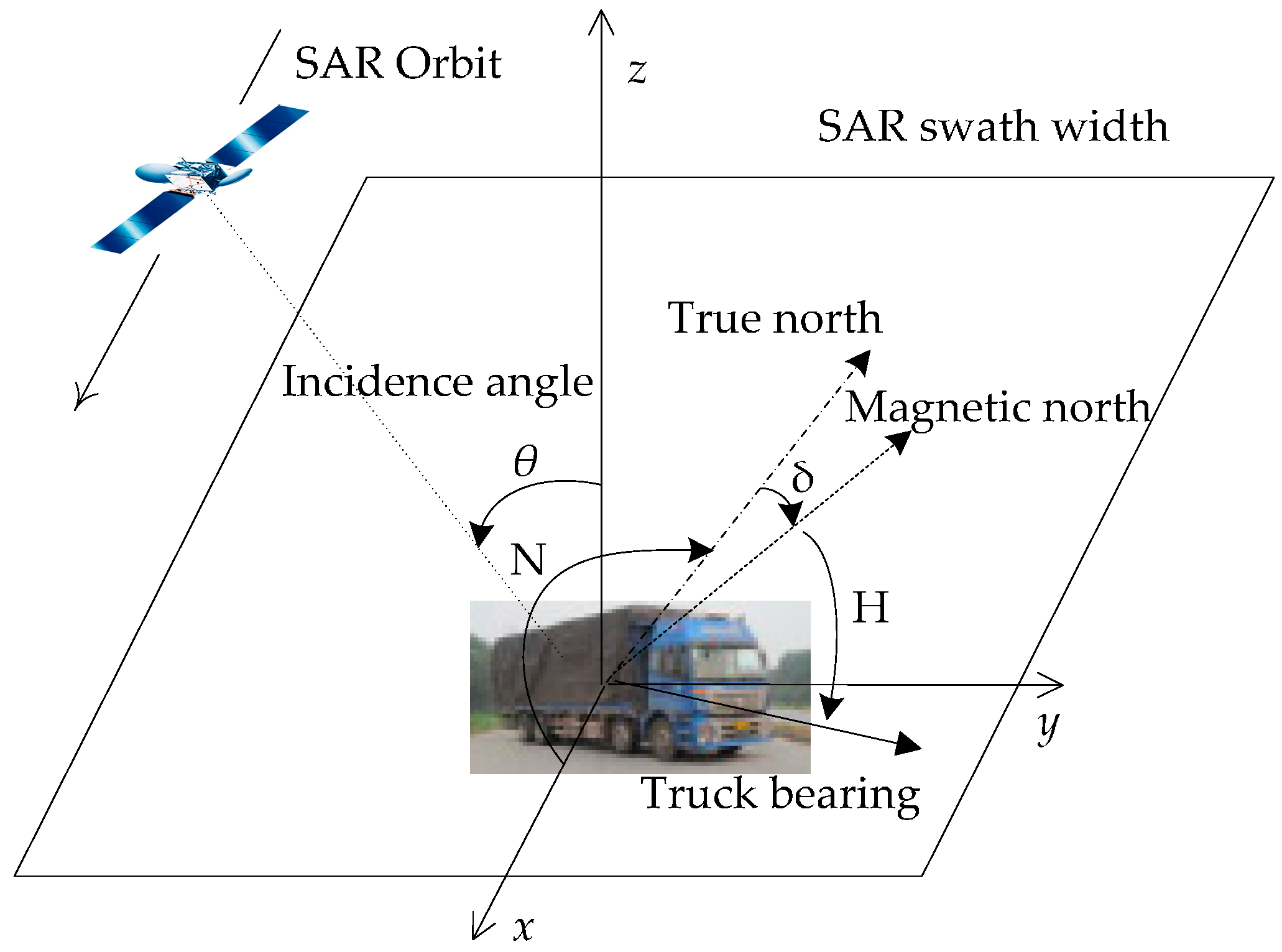
3.1. Aspect Angle Measurement
3.2. Measurement of Radar Cross Section (RCS)
3.3. Pauli Decomposition
3.4. Detectability Calculation with Different Metrics
4. Experiments
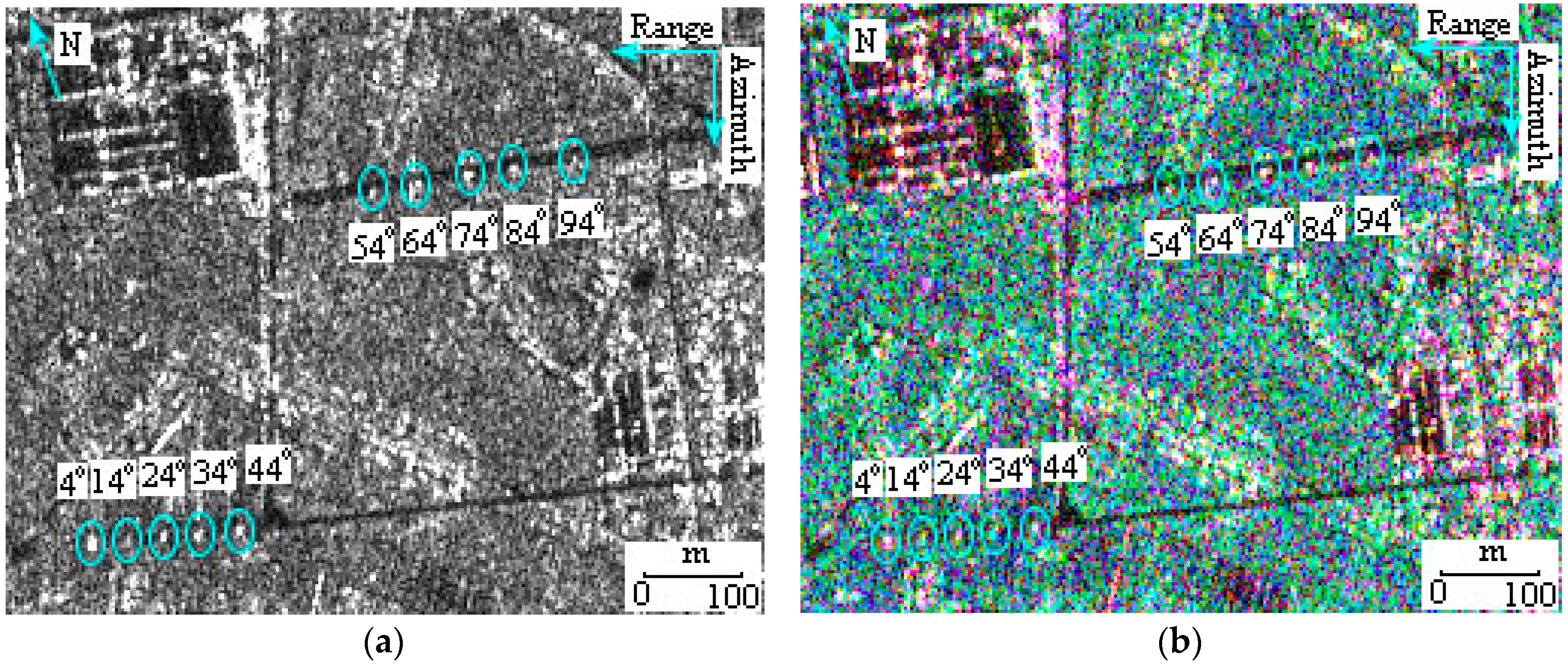
4.1. Experiment I
4.2. Experiment II and III
4.3. Experiment IV
5. Results and Discussion
5.1. Analysis of the Influence of the Vehicle’s Size on Detectability
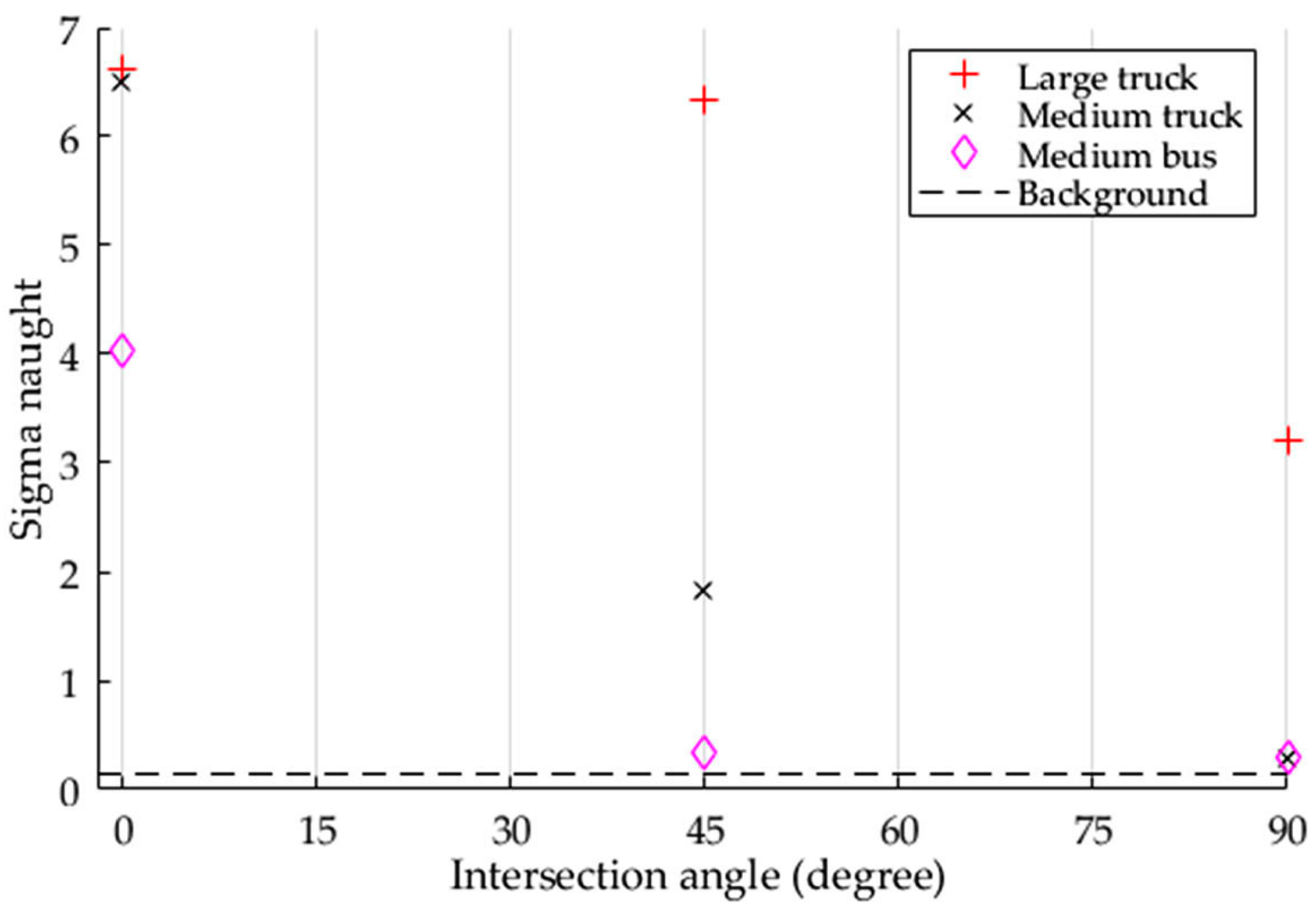
5.2. Analysis of the Influence of Intersection Angle on Detectability
5.3. Analysis of the Influence of a Vehicle’s Shape on Detectability
5.4. Detectability Comparison between Different Metrics
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Crisp, D.J. The State-of-the-Art in Ship Detection in Synthetic Aperture Radar Imagery; DSTO-RR-0272; Department Science and Technology Organization Publication Online: Adelaide, Australia, 2004. [Google Scholar]
- Wang, C.; Zhang, H.; Wu, F.; Jiang, S.F.; Zhang, B.; Tang, Y.X. A Novel Hierarchical Ship Classifier for COSMO-SkyMed SAR Data. IEEE Geosci. Remote Sens. Lett. 2014, 11, 484–488. [Google Scholar] [CrossRef]
- Chen, J.H.; Zhang, B.; Wang, C. Backscattering Feature Analysis and Recognition of Civilian Aircraft in TerraSAR-X Images. IEEE Geosci. Remote Sens. Lett. 2015, 12, 796–800. [Google Scholar] [CrossRef]
- Bethke, K.-H.; Baumgartner, S.; Gabele, M.; Hounam, D.; Kemptner, E.; Klement, D.; Krieger, G.; Erxleben, R. Air- and spaceborn monitoring of road traffic using SAR moving target indication-Project TRAMRAD. ISPRS J. Photogramm. Remote Sens. 2006, 61, 243–259. [Google Scholar] [CrossRef]
- Mittermayer, J.; Runge, H. Conceptual Studies for Exploiting the TerraSAR-X Dual Receive Antenna. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Toulouse, France, 21–25 July 2003; Volume 3, pp. 2140–2142.
- Meyer, F.; Hinz, S. The feasibility of traffic monitoring with TerraSAR-X—Analyses and consequences. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Anchorage, AK, USA, 20–24 September 2004; Volume 2, pp. 1502–1505.
- Meyer, F.; Hinz, S.; Laika, A.; Weihing, D.; Bamler, R. Performance analysis of the TerraSAR-X Traffic monitoring concept. ISPRS J. Photogramm. Remote Sens. 2006, 61, 225–242. [Google Scholar] [CrossRef]
- Hinz, S.; Meyer, F.; Eineder, M.; Bamler, R. Traffic monitoring with spaceborne SAR—Theory, simulations, and experiments. Comput. Vis. Image Understand 2007, 106, 231–244. [Google Scholar] [CrossRef]
- Palubinskas, G.; Runge, H.; Reinartz, P. Radar signautres of road vehicles. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Anchorage, AK, USA, 20–24 September 2004; Volume 2, pp. 1498–1501.
- Palubinskas, G.; Runge, H.; Reinartz, P. Radar signatures of road vehicles: Airborne SAR experiments. In Proceedings of the SAR Image Analysis, Modeling, and Techniques VII, Bruges, Belgium, 19–20 September 2005; Volume 5980, pp. 60–70.
- Palubinskas, G.; Runge, H. Radar Signatures of a Passenger Car. IEEE Geosci. Remote Sens. Lett. 2007, 4, 644–648. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Liu, F. Detecting Cars in VHR SAR Images via Semantic CFAR Algorithm. IEEE Geosci. Remote Sens. Lett. 2016, 6, 801–805. [Google Scholar] [CrossRef]
- Yu, W.; Wang, Y.; Liu, H.; He, J. Superpixel-Based CFAR Target Detection for High-Resolution SAR Images. IEEE Geosci. Remote Sens. Lett. 2016, 5, 730–734. [Google Scholar] [CrossRef]
- Dungan, K.E. Vehicle detection in wide-angle SAR. In Proceedings of the Algorithms for Synthetic Aperture Radar Imagery XXIII, Baltimore, MD, USA, 17–21 April 2006.
- Zhang, B.; Zhang, H.; Wang, C.; Tang, Y.X. Characteristic analysis of vehicle target in quad-pol Radarsat-2 SAR images. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 3142–3145.
- Curlander, J.C.; McDonough, R.N. Synthetic Aperture Radar Systems and Signal Processing, 1st ed.; John Wiley & Sons, Inc.: New York, NY, USA, 1991. [Google Scholar]
- Skolnik, M.I. Introduction to Radar Systems, 3rd ed.; Publishing House of Electronics Industry: Beijing, China, 2006; pp. 26–34. [Google Scholar]
- Lee, J.S.; Pottier, E. Polarimetric Radar Image: From Basics to Applications; Taylor & Francis Group: Boca Raton, FL, USA, 2009. [Google Scholar]
- Wei, J.; Zhang, J.; Huang, G.; Zhao, Z. On the Use of Cross-Correlation between Volume Scattering and Helix Scattering from Polarimetric SAR Data for the Improvement of Ship Detection. Remote Sens. 2016, 8, 74. [Google Scholar] [CrossRef]
- Franceschetti, G.; Iodice, A.; Riccio, D. A canonical problem in electromagnetic backscattering from buildings. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1787–1801. [Google Scholar] [CrossRef]
- Dungan, K.E.; Austin, C.; Nehrbass, J.; Potter, L.C. Civilian vehicle radar data domes. In Proceedings of the Algorithms for Synthetic Aperture Radar Imagery XVII, Orlando, FL, USA, 17–21 April 2010; Volume 7699, pp. 1–12.
- Ferro, A.; Brunner, D.; Bruzzone, L.; Lemoine, G. On the Relationship between Double Bounce and the Orientation of Buildings in VHR SAR Images. IEEE Geosci. Remote Sens. Lett. 2011, 8, 612–616. [Google Scholar] [CrossRef]
- Liu, T.; Lampropoulos, G. A New Polarimetric CFAR Ship Detection System. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Denver, CO, USA, 31 July–4 August 2006; pp. 137–140.
- Wang, N.; Liu, L.; Zhao, L.; Lu, J. A novel polarimetric SAR ship detection method. In Proceedings of the 3rd International Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Seoul, Korea, 26–30 September 2011; pp. 1–4.
- Xi, Y.; Zhang, X.; Lai, Q.; Li, W.; Lang, H.T. A new PolSAR ship detection metric fused by polarimetric similarity and the third eigenvalue of the coherency matrix. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 112–115.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Pixel Resolution (m) | Incidence Angle (°) | Orbit Direction | Beam Mode |
|---|---|---|---|---|
| I | 4.7 × 4.9 | 23.2 | Ascending | Q4 |
| II | 4.7 × 4.7 | 39.1 | Descending | Q19 |
| III | 4.7 × 5.0 | 48.8 | Descending | Q31 |
| IV | 4.7 × 5.0 | 48.2 | Descending | Q30 |
| Vehicle | Length | Width | Height |
|---|---|---|---|
| Medium bus | 5.7 | 2.2 | 2.6 |
| Medium truck | 8.7 | 2.3 | 3.4 |
| Larger truck | 11.9 | 2.5 | 3.8 |
| Tank truck | 15.8 | 2.5 | 4.0 |
| Vehicle | 0° | 45° | 90° |
|---|---|---|---|
| Larger truck | 0.999 | 0.999 | 0.962 |
| Medium truck | 0.999 | 0.534 | 0.039 |
| Medium bus | 0.993 | 0.032 | 0.060 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Wang, C.; Zhang, H.; Wu, F.; Tang, Y.-X. Detectability Analysis of Road Vehicles in Radarsat-2 Fully Polarimetric SAR Images for Traffic Monitoring. Sensors 2017, 17, 298. https://doi.org/10.3390/s17020298
Zhang B, Wang C, Zhang H, Wu F, Tang Y-X. Detectability Analysis of Road Vehicles in Radarsat-2 Fully Polarimetric SAR Images for Traffic Monitoring. Sensors. 2017; 17(2):298. https://doi.org/10.3390/s17020298
Chicago/Turabian StyleZhang, Bo, Chao Wang, Hong Zhang, Fan Wu, and Yi-Xian Tang. 2017. "Detectability Analysis of Road Vehicles in Radarsat-2 Fully Polarimetric SAR Images for Traffic Monitoring" Sensors 17, no. 2: 298. https://doi.org/10.3390/s17020298
APA StyleZhang, B., Wang, C., Zhang, H., Wu, F., & Tang, Y. -X. (2017). Detectability Analysis of Road Vehicles in Radarsat-2 Fully Polarimetric SAR Images for Traffic Monitoring. Sensors, 17(2), 298. https://doi.org/10.3390/s17020298