
Design of Novel FBG-Based Sensor of Differential Pressure with Magnetic Transfer

Abstract
:1. Introduction
2. Designs of Differential Pressure Sensor with Magnetic Transfer
2.1. The Overall Design
2.2. Sensing Principle of a Cantilever Beam of Uniform Strength
2.3. Structure Design of Magnetic Transfer
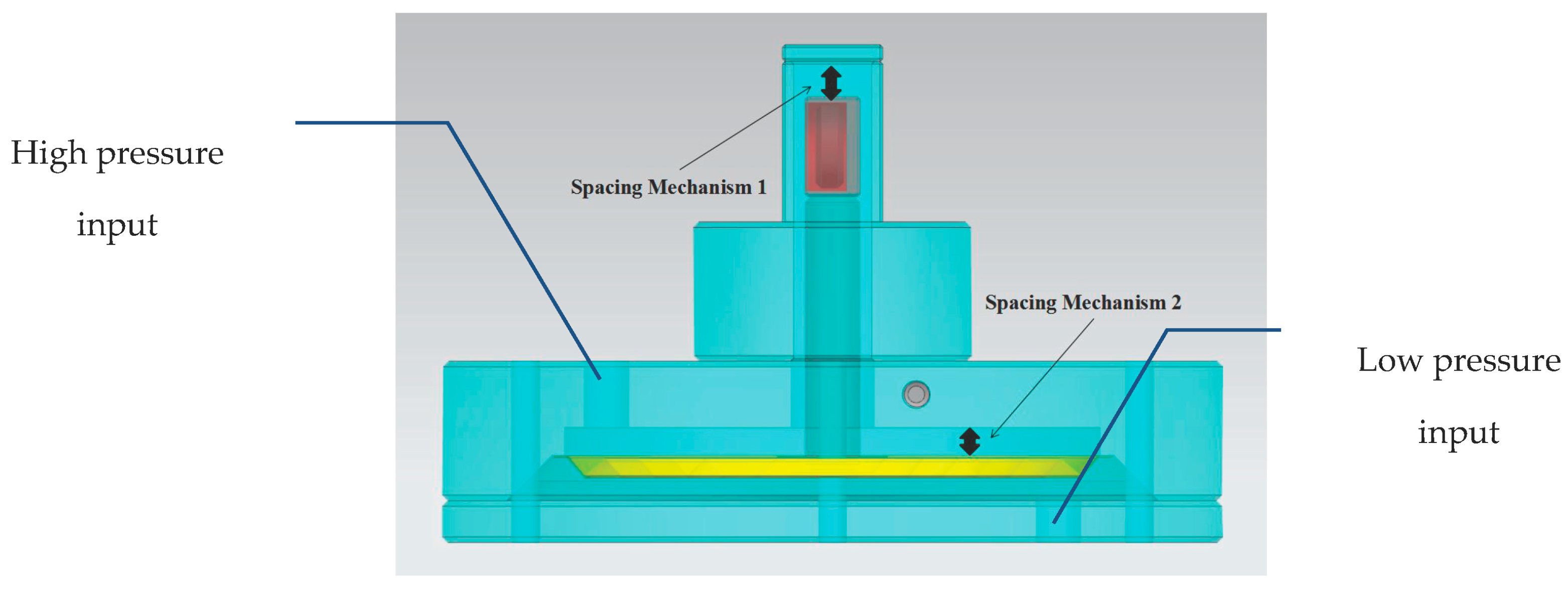
2.4. The Position Limiting Mechanism
2.5. The Temperature Compensation
3. Simulations of Pressure Corrugated Diaphragm and Test of Sensor
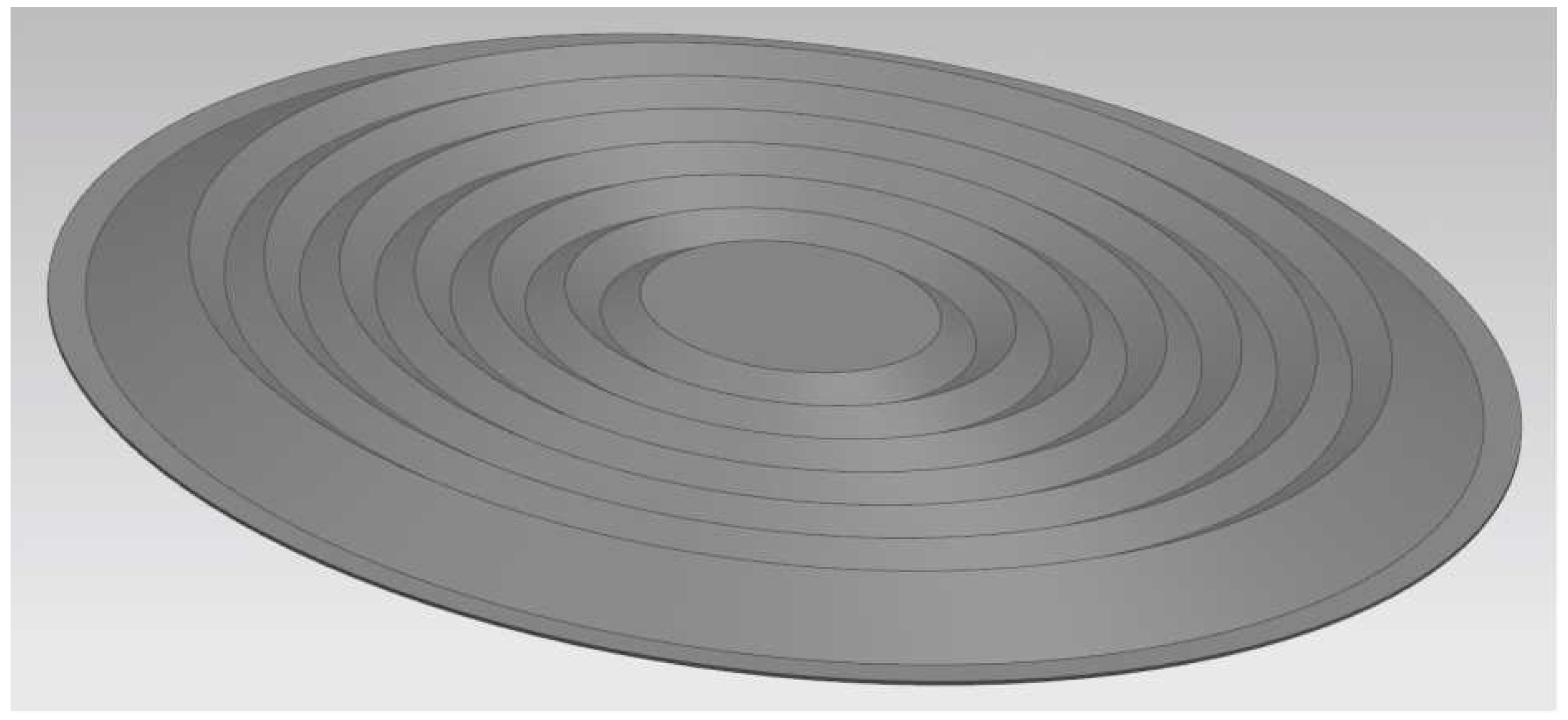
3.1. The Simulations of the Elastic Corrugated Diaphragm
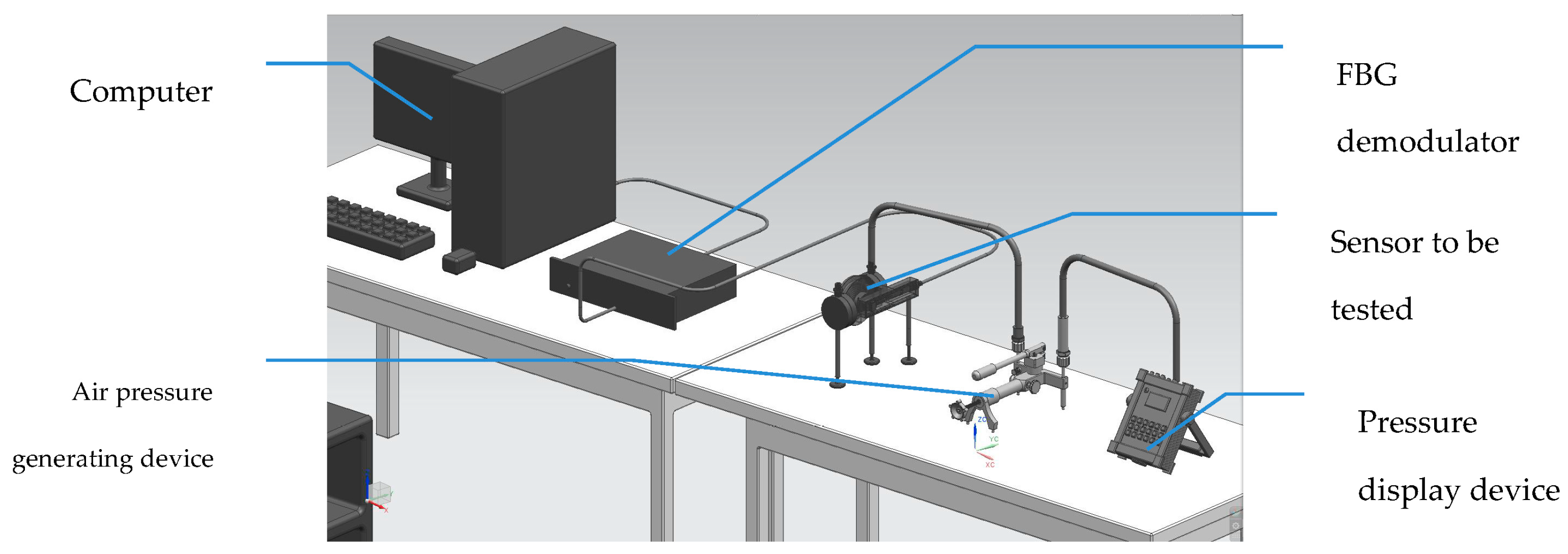
3.2. Test System of the Sensor
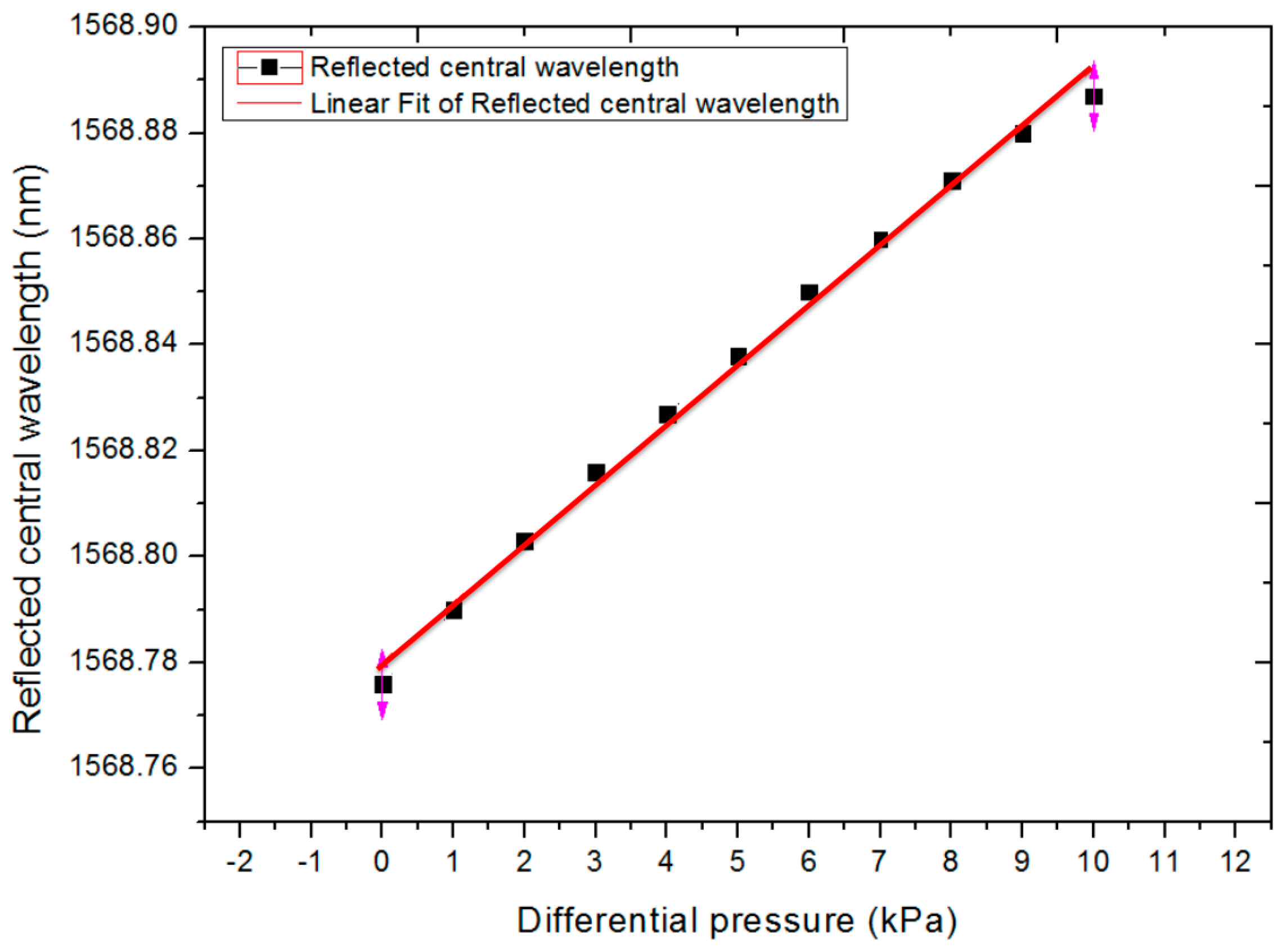
4. Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hu, H.; Zhong, L.; Zhou, Q. The present situation and the development of differential pressure sensor technology. Mach. Tool Hydraul. 2013, 11, 187–190. [Google Scholar]
- Tong, C.; Yang, J.; Liu, Z.; Yuan, L. Double spring tube fiber differential pressure sensors. Acta Photon. Sin. 2004, 10, 1172–1176. [Google Scholar]
- Dong, G.; Li, D.; Hao, R. Study on Micro Differential Pressure Sensor Based on Ferrofluid. Chin. J. Sens. Actuators 2009, 1, 13–16. [Google Scholar]
- Tong, W.; Li, X. The application of differential pressure sensors in liquid level measurement. Sci. Technol. Wizard 2010, 29, 50–54. [Google Scholar]
- Xu, G.; Xiong, D. Fiber Bragg grating sensing technology application in engineering. Chin. Opt. 2013, 3, 306–313. [Google Scholar]
- Scarcia, W.; Palma, G.; Falconi, M.C.; de Leonardis, F.; Passaro, V.M.N.; Prudenzano, F. Electromagnetic Modelling of Fiber Sensors for Low-Cost and High Sensitivity Temperature Monitoring. Sensors 2015, 15, 29855–29870. [Google Scholar] [CrossRef] [PubMed]
- Tang, H.; Sun, H.; Liu, H.; Zheng, D.; Zhang, G.; Chen, X.; Zheng, Y. Diffusion silicon multifunctional integration differential pressure sensor. Instrum. Tech. Sens. 2004, 7, 6–8. [Google Scholar]
- You, C.; Zhang, W.; Wang, W. A piezoresistive micro differential pressure sensor design and stress free. Instrum. Tech. Sens. 2009, 4, 105–107. [Google Scholar]
- Li, P.; Cao, Y.; Fan, Y. Semiconductor research application of differential pressure sensor. J. Data Acquis. Process. 1992, 3, 202–209. [Google Scholar]
- Chen, B.; Hu, X.; Sun, H. Capacitance differential pressure sensor is designed based on AD7745. Transducer Microsyst. Technol. 2011, 6, 71–76. [Google Scholar]
- Fu, W. Three differential pressure sensor center diaphragm structure design of the diaphragm. Instrum. Tech. Sens. 1997, 2, 35–38. [Google Scholar]
- Wang, Q.; Yan, N. Design and Study of Fiber Sensor Based on Cantilever Beam of Uniform Strength. Microcomput. Inf. 2010, 4, 107–108. [Google Scholar]
- Liu, J.; Li, Y.; Liu, B.; Zhang, N.; Zhang, Z.; Liu, Q. The improvement of the two-way overload differential pressure sensor error. Instrum. Tech. Sens. 2009, 2, 94–96. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Diameter of full size | 100 mm |
| Edge width | 2 mm |
| Number of corrugation | 6 |
| Depth of corrugation | 2 mm |
| Spacing of corrugation | 6 mm |
| material | stainless steel |
| Diaphragm Thickness | Maximum Deformation of Diaphragm | Maximum Pressure on the Center of Diaphragm |
|---|---|---|
| 0.200 mm | 0.035 mm | 10.899 MPa |
| 0.100 mm | 0.094 mm | 26.495 MPa |
| 0.050 mm | 0.172 mm | 35.854 MPa |
| 0.025 mm | 0.300 mm | 69.720 MPa |
| 0.0125 mm | 0.300 mm | 136.830 MPa |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lyu, G.; Che, G.; Li, J.; Jiang, X.; Wang, K.; Han, Y.; Gao, L. Design of Novel FBG-Based Sensor of Differential Pressure with Magnetic Transfer. Sensors 2017, 17, 375. https://doi.org/10.3390/s17020375
Lyu G, Che G, Li J, Jiang X, Wang K, Han Y, Gao L. Design of Novel FBG-Based Sensor of Differential Pressure with Magnetic Transfer. Sensors. 2017; 17(2):375. https://doi.org/10.3390/s17020375
Chicago/Turabian StyleLyu, Guohui, Guohang Che, Junqing Li, Xu Jiang, Keda Wang, Yueqiang Han, and Laixu Gao. 2017. "Design of Novel FBG-Based Sensor of Differential Pressure with Magnetic Transfer" Sensors 17, no. 2: 375. https://doi.org/10.3390/s17020375
APA StyleLyu, G., Che, G., Li, J., Jiang, X., Wang, K., Han, Y., & Gao, L. (2017). Design of Novel FBG-Based Sensor of Differential Pressure with Magnetic Transfer. Sensors, 17(2), 375. https://doi.org/10.3390/s17020375