
An Adaptive Damping Network Designed for Strapdown Fiber Optic Gyrocompass System for Ships



Abstract
:1. Introduction
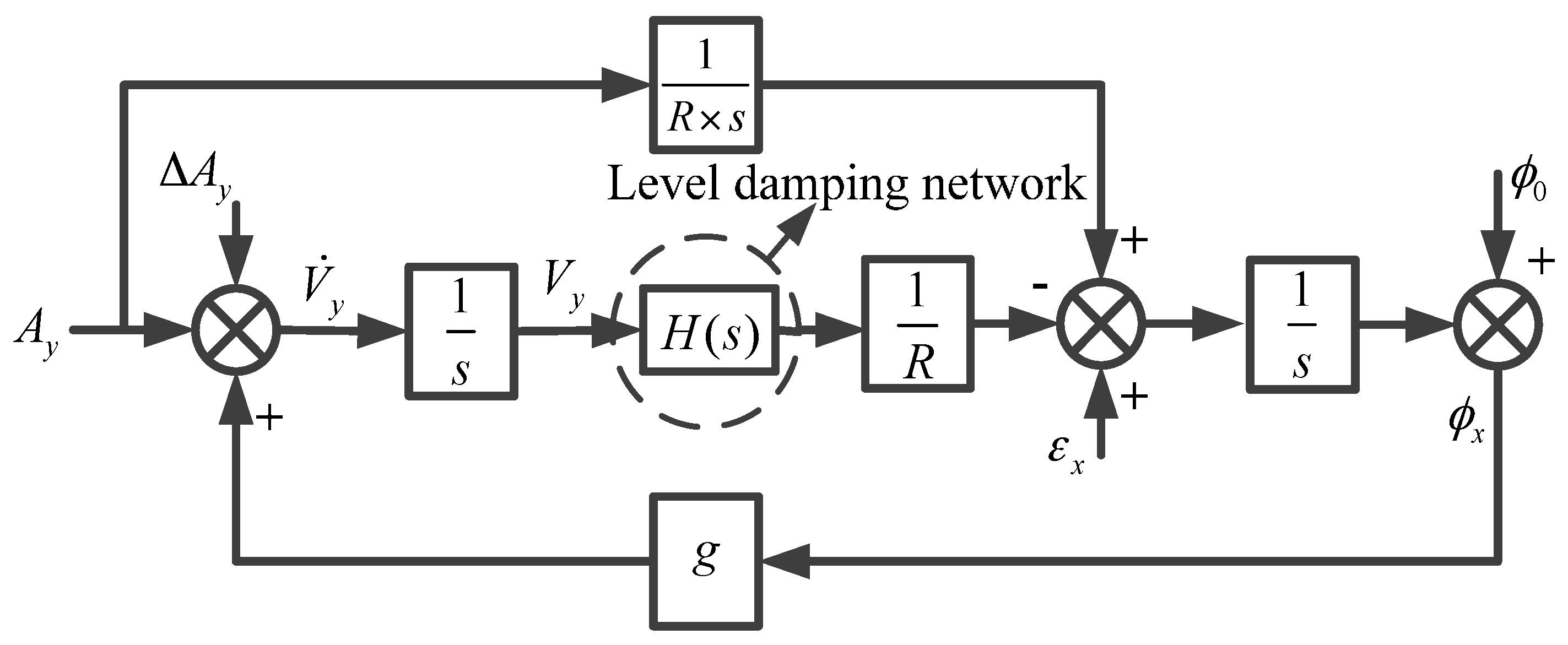
2. The Conventional External Horizontal Damping Network and Overshoot Error
3. Design of the Adaptive Damping Network
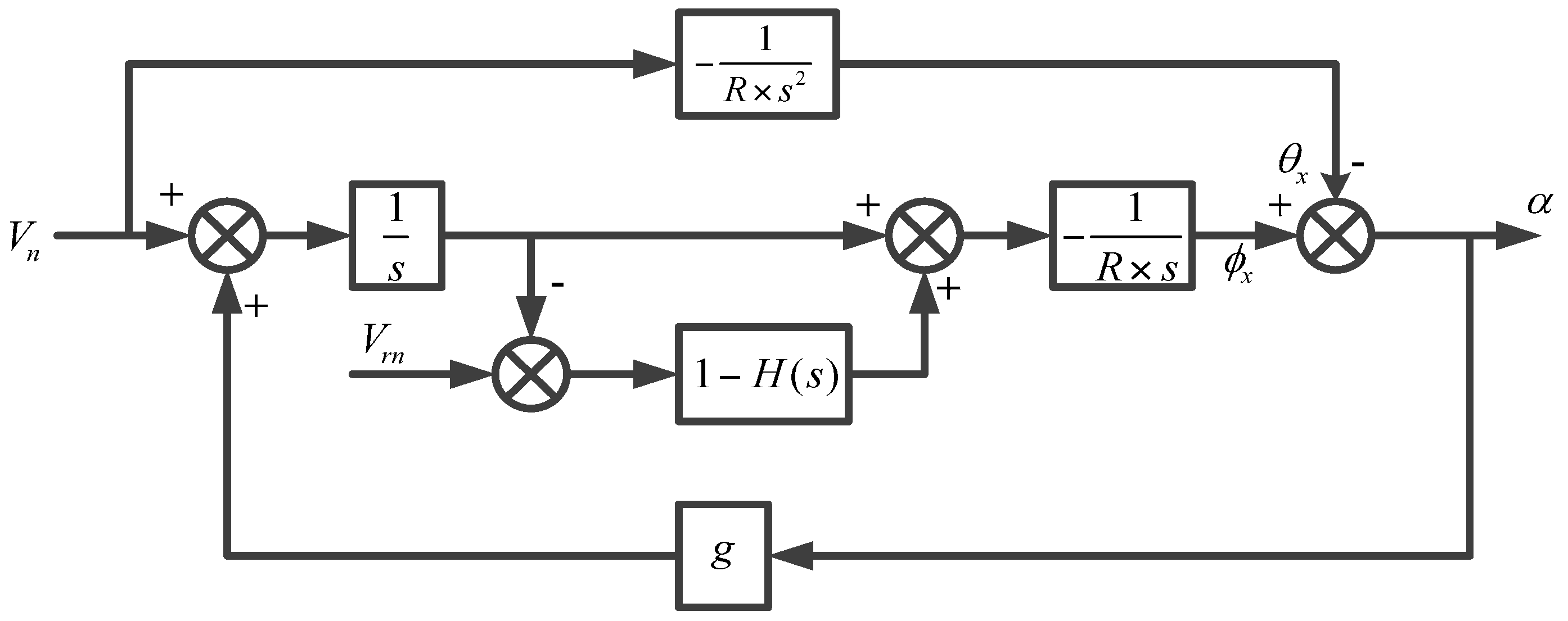
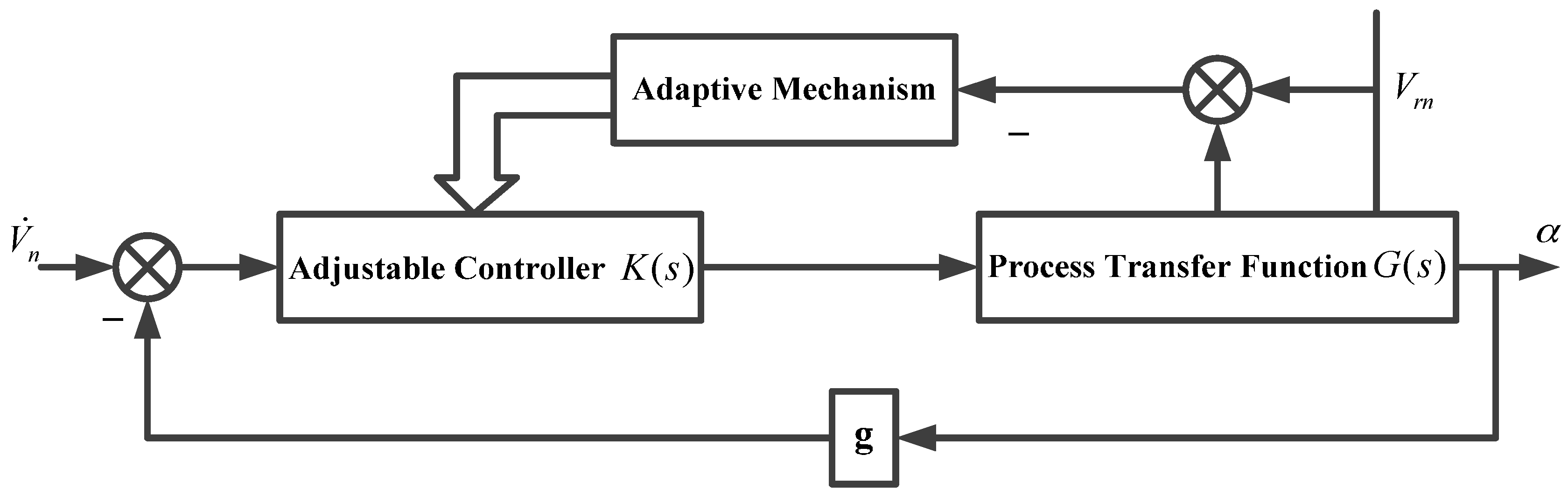
3.1. The Control Scheme of the Adaptive Damping Network
3.2. The Relationship between the System Velocity, External Velocity, and the Damping Coefficient
3.3. Adaptive Design of the Damping Network Parameters
4. Suppression Technique of the Overshoot
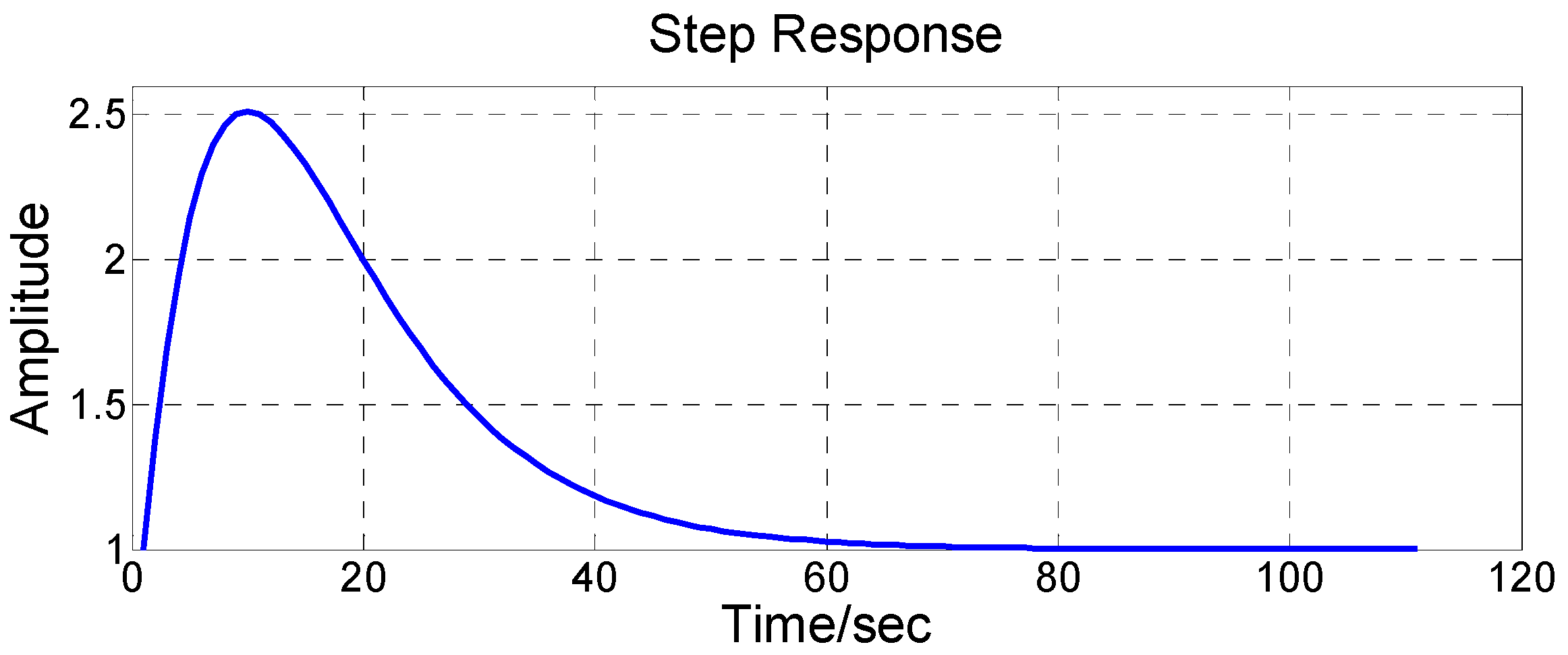
4.1. Analysis of the Overshoot
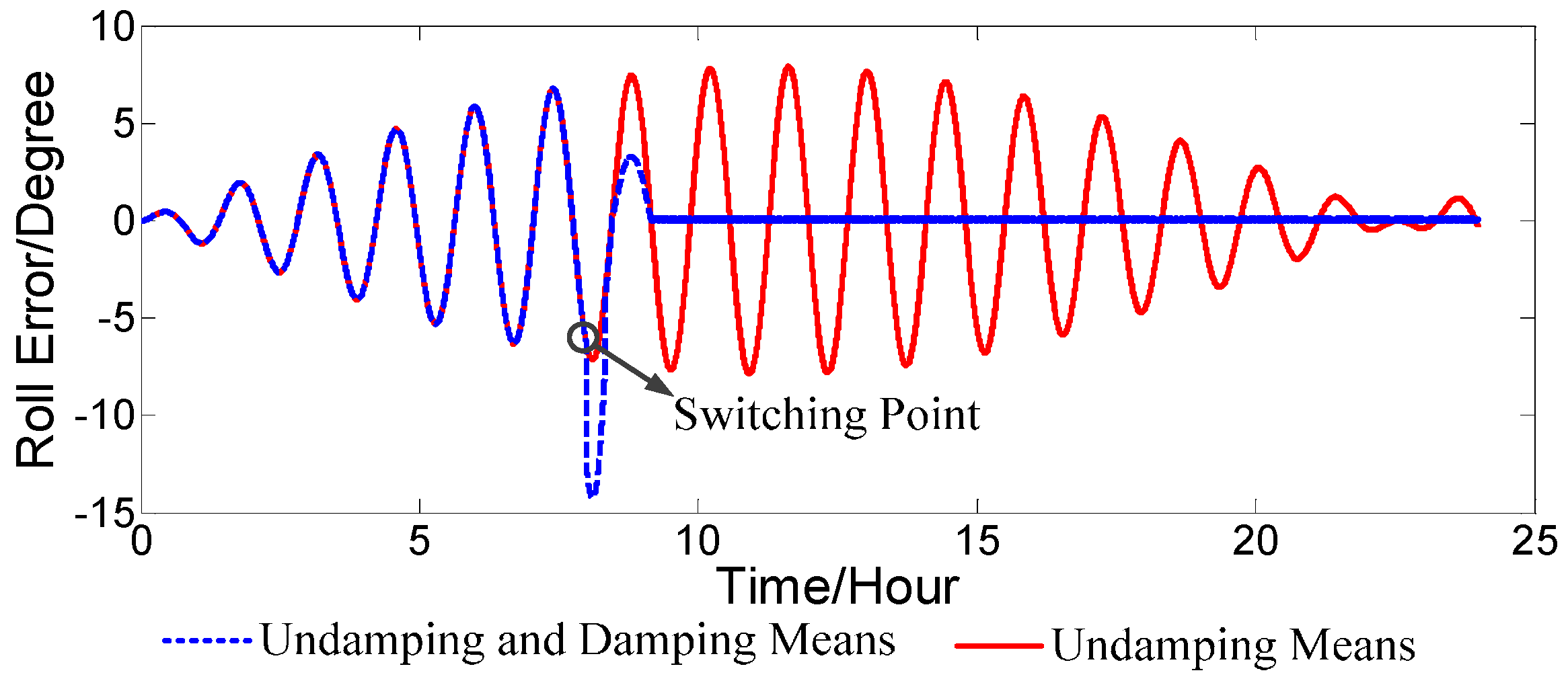
4.2. Overshoot Suppression of External Damping Status Switching
5. Experimental Results and Discussions
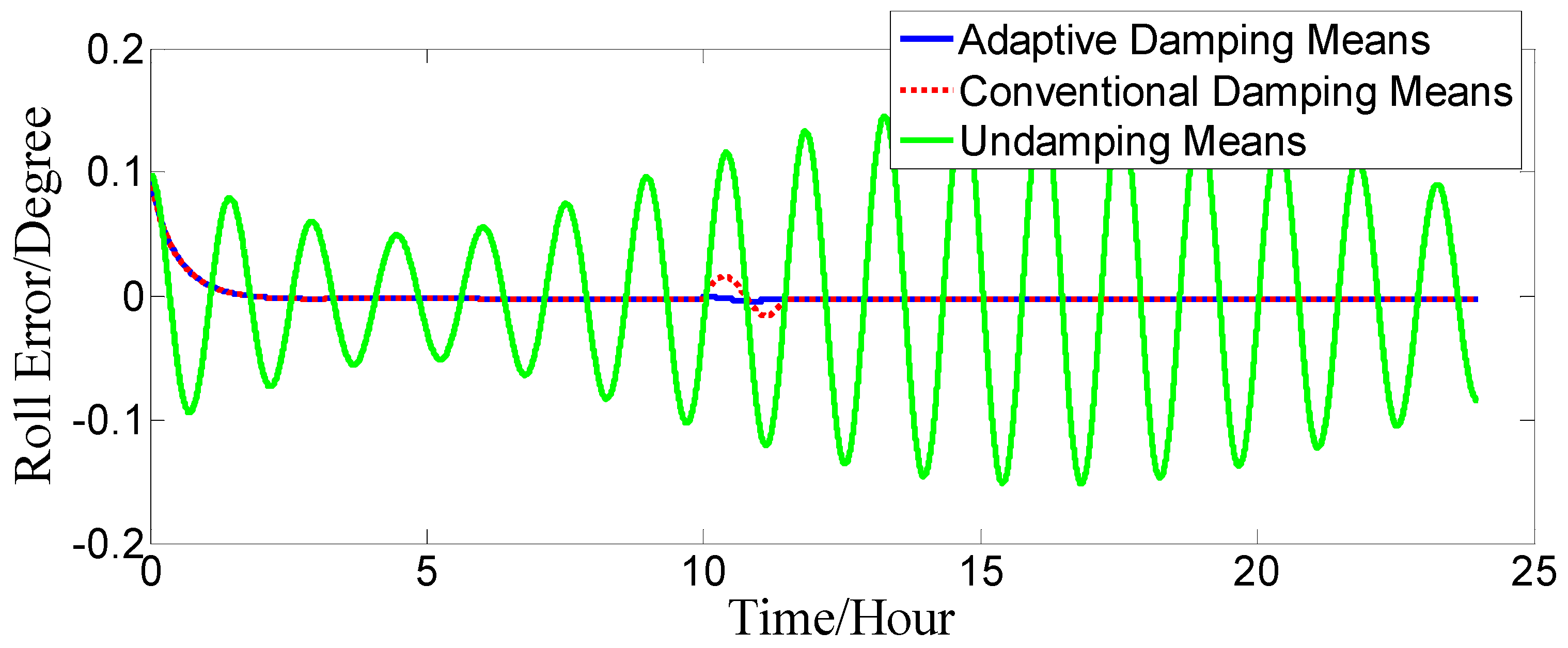
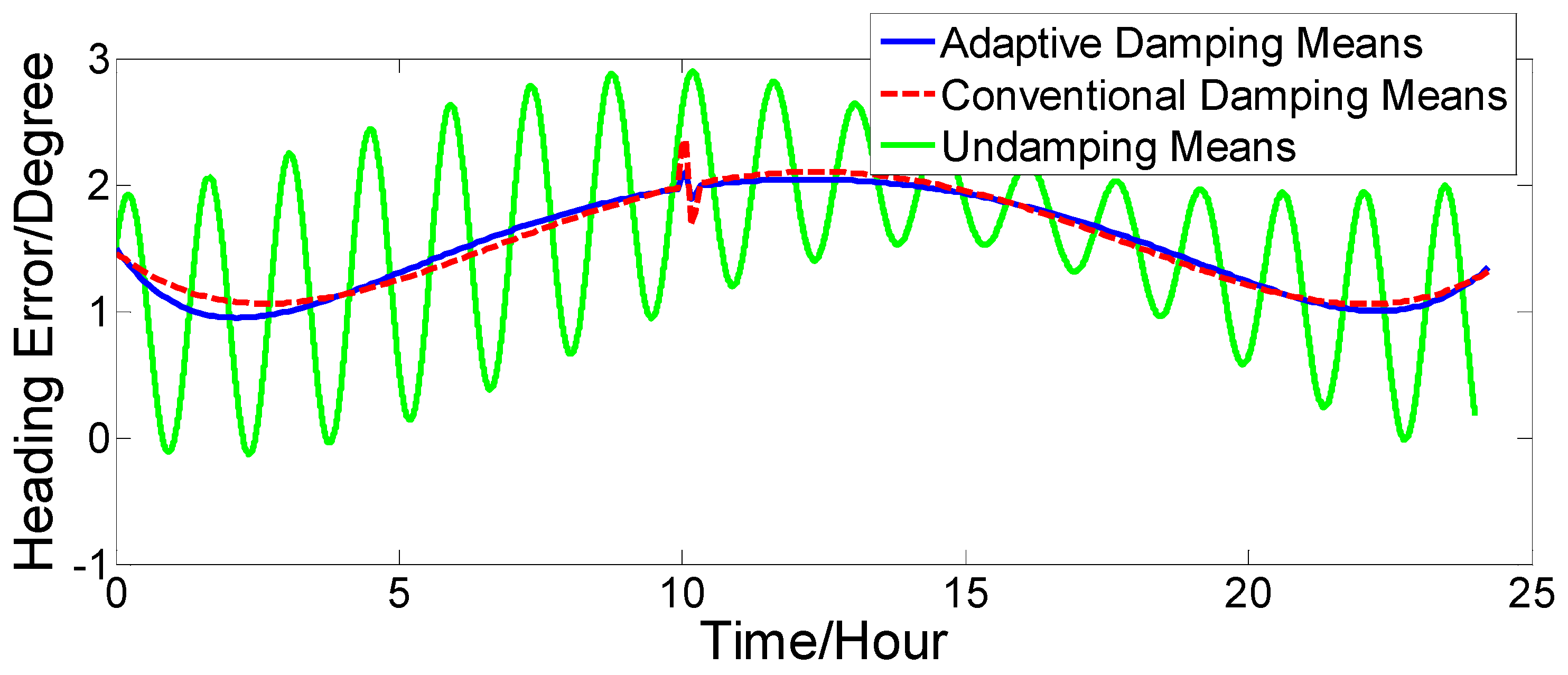
5.1. System Simulation Experiment
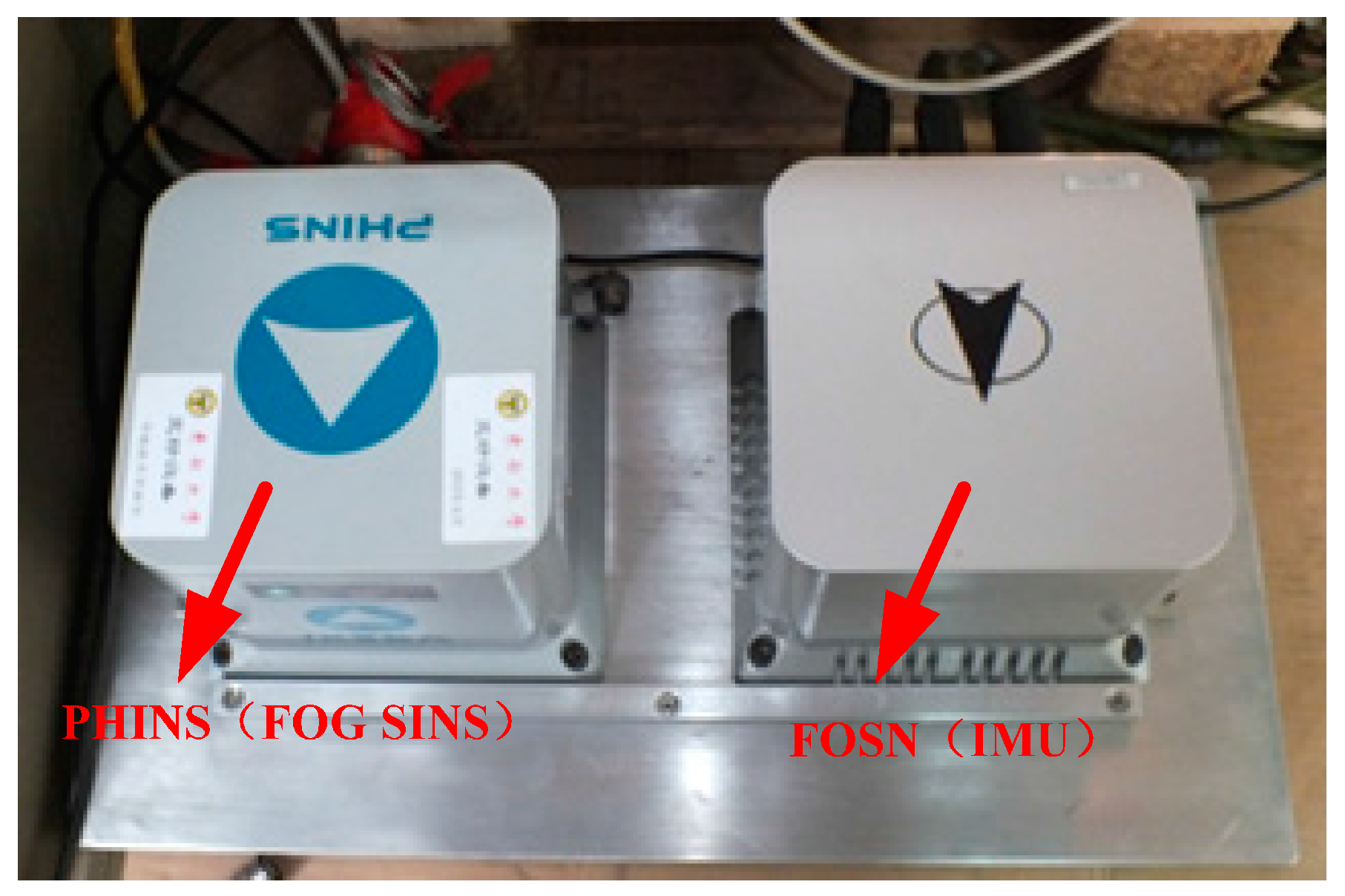
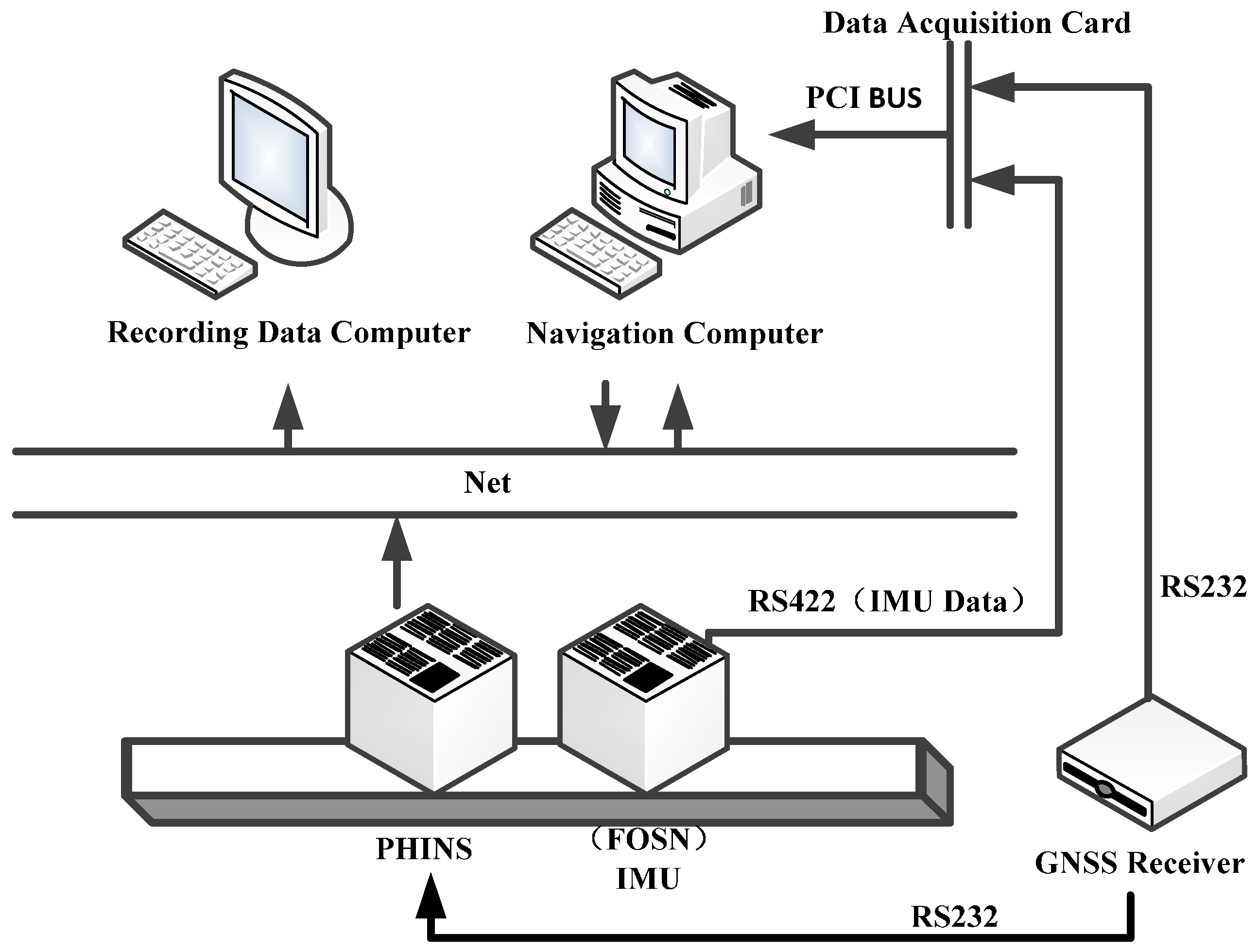
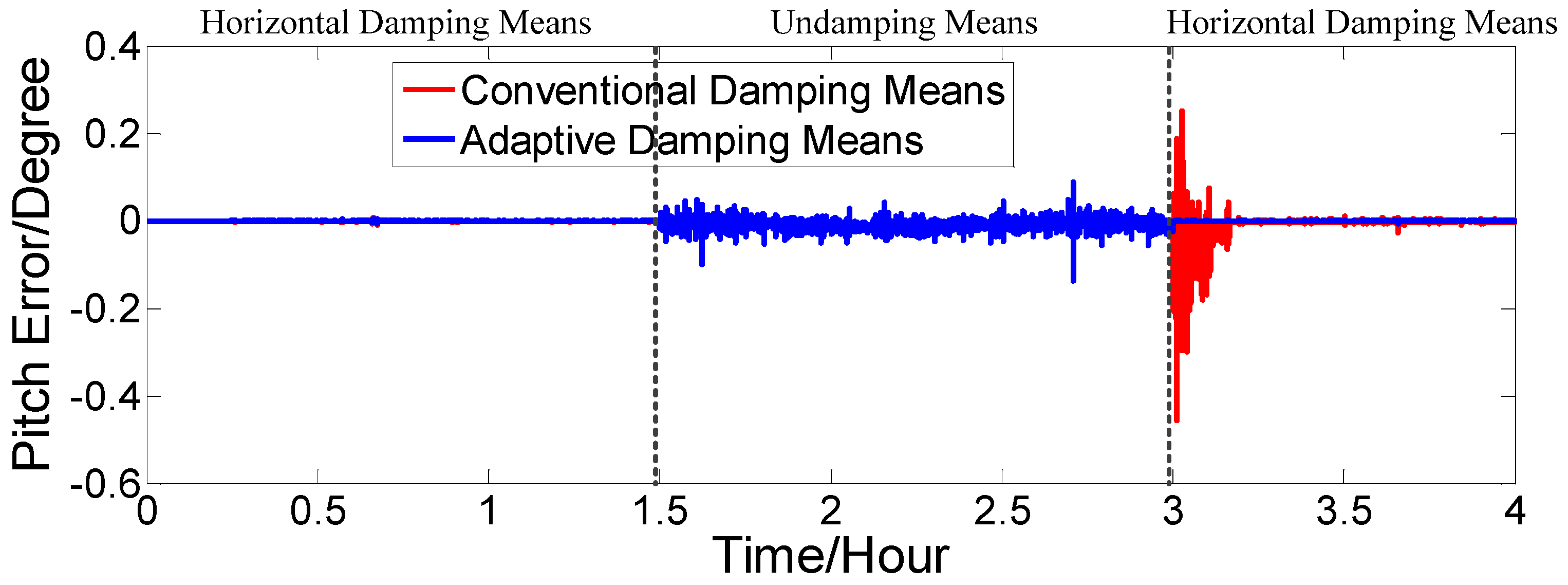
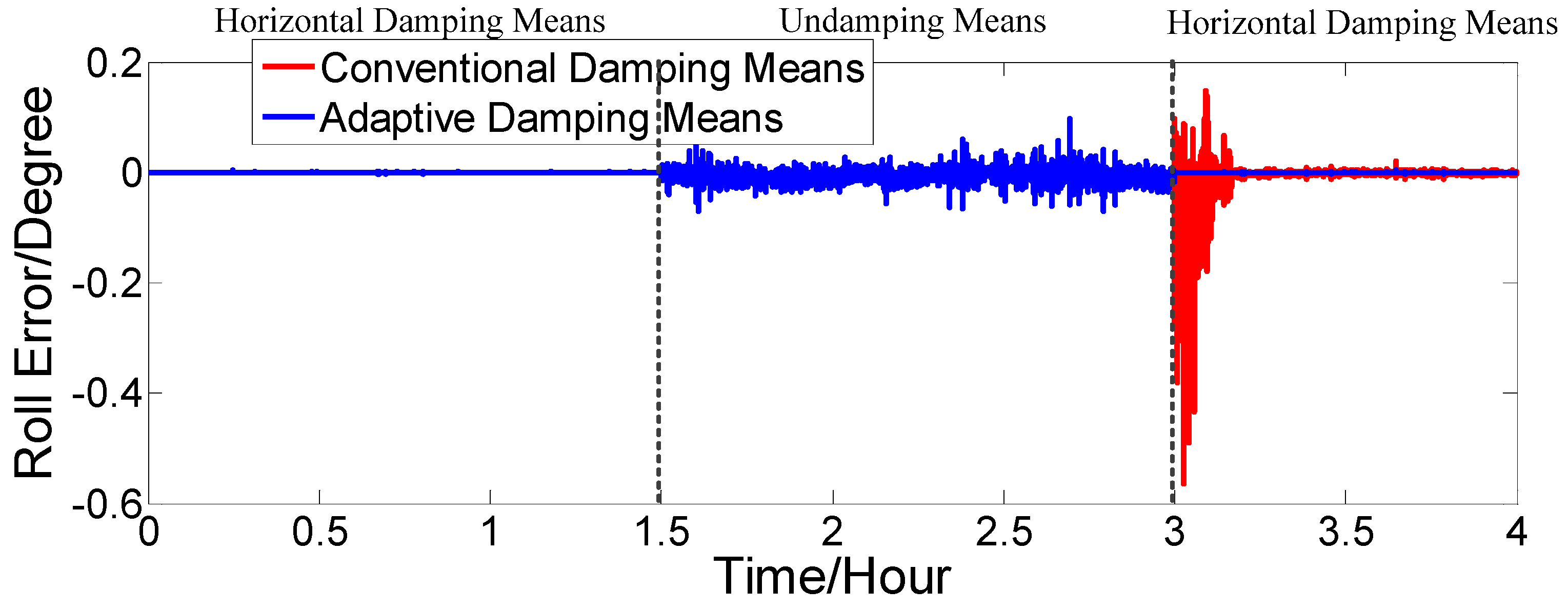
5.2. Vehicle Experiment
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Huang, D.M.; Zhang, S.X.; Sun, F. Gyrocompass; National Defence Industry Press: Beijing, China, 1990; pp. 133–152. [Google Scholar]
- Britting, K.R. Inertial Navigation Systems Analysis; Artech House Publishers Press: London, UK, 2010; pp. 226–260. [Google Scholar]
- Gao, W.; Zhang, Y.; Xu, B.; Ben, X. Analyses of Damping Network Effect on SINS. In Proceedings of the 2009 IEEE International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 2530–2536.
- Li, K.; Liu, F.; Xu, Y.F. Research on internal damping algorithm of marine inertial navigation system. In Proceedings of the Intelligent Computing and Information Science, Chongqing, China, 8–9 January 2011; pp. 256–261.
- Zha, F.; Xu, J.N.; Qin, F.J.; Ji, B. Damp Network Design of Horizontal Loop in Strapdown Inertial Navigation System. Acta Armamentarii 2011, 8, 996–1001. [Google Scholar]
- Chen, J.H.; Hao, Y.L.; Wu, L.; Yan, L.; Gan, S. Research and Realization of Inertial Gyrocompass System Based on INS. In Proceedings of the 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 6433–6438.
- Zhao, W.Y.; Yang, G.L.; Zhuang, L.J.; Wu, J.J. Study on Level Damp of Double Inertial Navigation System. J. Syst. Simul. 2007, 5, 1109–1111. [Google Scholar]
- Cheng, J.H.; Shi, J.Y.; Rong, W.T.; Yan, L. Research and realization of an azimuth damping inertial navigation system based on multi-damping coefficient. J. Harbin Eng. Univ. 2011, 6, 786–791. [Google Scholar]
- Li, K.; Zhang, J.J.; Liu, F. A fuzzy control internal damping algorithm in a long-endurance inertial navigation system. J. Harbin Eng. Univ. 2012, 4, 485–488. [Google Scholar]
- Liu, C.; Long, X.W.; Wei, G.; Gao, C.F. Inner damping network and algorithm research of horizontal loop in SINS. Infrared Laser Eng. 2014, 8, 2637–2643. [Google Scholar]
- Huang, W.Q.; Hao, Y.L.; Cheng, J.H.; Li, G.; Fu, J.Q.; Bu, X.B. Research of the inertial navigation system with variable damping coefficients horizontal damping networks. In Proceedings of the OCEANS’04 MTS/IEEE TECHNO-OCEAN’04, Kobe, Japan, 9–12 November 2004; pp. 1272–1276.
- Qin, F.J.; Li, A.; Xu, J.N.; Zha, F. Horizontal inner damping method with continuously adjustable parameter for inertial navigation system. J. Chin. Inert. Technol. 2012, 3, 290–293. [Google Scholar]
- Xu, B.; Sun, F. An Independent Damped Algorithm based on SINS for Ship. In Proceedings of the 2009 International Conference on Computer Engineering and Technology, Singapore, 22–24 January 2009; pp. 88–92.
- Chernodarov, A.V. Adaptive robust damping of divergent oscillations in updatable inertial systems. In Proceedings of the 2nd International Conference, St. Petersburg, Russia, 5–7 July 2000; pp. 133–134.
- Zhao, L.; Li, J.S.; Cheng, J.H.; Hao, Y. Damping strapdown inertial navigation system based on a Kalman filter. Meas. Sci. Technol. 2016, 11, 1–12. [Google Scholar] [CrossRef]
- Liu, F.; Liu, C.; Weng, H.N.; Hu, X.M. Level damping algorithm of SINS based on Kalman filtering. J. Chin. Inert. Technol. 2013, 3, 285–288. [Google Scholar]
- Du, Y.L.; Liu, J.Y.; Liu, R.H.; Sun, Y.R. Fuzzy Damping Algorithm in Strapdown Attitude Heading Reference System. J. Nanjing Univ. Aeronaut. Astronaut. 2005, 3, 274–278. [Google Scholar]
- Liu, J.Y.; Du, Y.L.; Zhu, Y.H.; Li, R.B. Damp Kalman Filter with Fuzzy Adaptive Algorithm in AHRS. J. Nanjing Univ. Aeronaut. Astronaut. 2007, 2, 137–142. [Google Scholar]
- Du, Y.L.; Liu, J.Y.; Li, R.B.; Zhu, Y.H. The Fuzzy Kalman Filter of Damp Attitude Algorithm. J. Astronaut. 2007, 2, 305–309. [Google Scholar]
- Li, Q.; Ben, Y.Y.; Sun, F. Strapdown fiber optic gyrocompass using adaptive network-based fuzzy inference system. Opt. Eng. 2014, 1, 1–11. [Google Scholar] [CrossRef]
- Allotta, B.; Costanzi, R.; Meli, E.; Pugi, L.; Ridolfi, A.; Vettori, G. Cooperative localization of a team of AUVs by a tetrahedral configuration. Robot. Auton. Syst. 2014, 8, 1228–1237. [Google Scholar] [CrossRef]
- Allotta, B.; Pugi, L.; Costanzi, R.; Vettori, G. Localization Algorithm for a fleet of three AUVs by INS, DVL and Range measurements. In Proceedings of the 15th International Conference on Advanced Robotics, Tallinn, Estonia, 20–23 June 2011; pp. 631–636.
- Liu, W.R.; Zhuang, L.J. Adaptive hybrid intelligent control of an INS level damp network. J. Harbin Inst. Tech. 2005, 11, 1586–1588. [Google Scholar]
- Chen, J.H.; Hao, Y.L.; Sun, F.; Wang, X.Z. Application of auto-compensation technique in the comprehensive calibration of INS. J. Harbin Eng. Univ. 2008, 1, 40–44. [Google Scholar]
- Xu, B. High-Precision Fiber-Gyroscope Inertial Navigation System Technique for Warship. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2010. [Google Scholar]
- He, H.Y.; Xu, J.N.; Qin, F.J. Research for SINS Damping Overshoot Error Suppression Algorithm. Ship Electron. Eng. 2012, 11, 39–41. [Google Scholar]
- Huang, D.M.; Chen, L. Inertial Navigation System; National Defence Industry Press: Beijing, China, 1986; pp. 107–112. [Google Scholar]
- Qin, Y.Y. Inertial Navigation; Beijing Science Press: Beijing, China, 2006; pp. 42–147. [Google Scholar]
- Du, Y.L.; Liu, J.Y.; Liu, R.H. The fuzzy Kalman filter of damp attitude algorithm. J. Astronaut. 2007, 2, 305–309. [Google Scholar]
- Dorf, R.C.; Bishop, R.H. Modern Control Systems, 12nd ed.; Prentice Hall Press: Upper Saddle River, NJ, USA, 2010; pp. 98–108. [Google Scholar]
- Xia, D.Z.; Hu, Y.W.; Ni, P.Z. A Digitalized Gyroscope System Based on a Modified Adaptive Control Method. Sensors 2016, 3, 321. [Google Scholar] [CrossRef] [PubMed]
- Park, S.S. Adaptive control of a vibratory angle measuring gyroscope. Sensors 2010, 10, 8478–8490. [Google Scholar] [CrossRef] [PubMed]
- Cai, Q.Z.; Yang, G.L.; Song, N.F.; Liu, Y.L. Systematic Calibration for Ultra-High Accuracy Inertial Measurement Units. Sensors 2016, 16, 940. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Zhang, Y.; Wang, J.G. Research on Initial Alignment and Self-Calibration of Rotary Strapdown Inertial Navigation Systems. Sensors 2015, 15, 3154–3171. [Google Scholar] [CrossRef] [PubMed]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 3.0 | 0.04 |
| 1.8 | 0.05 |
| 0.7 | 0.08 |
| 0.6 | 0.10 |
| 0.5 | 0.12 |
| 0.4 | 0.22 |
| 0.3 | 0.44 |
| 0.2 | 0.64 |
| 0.1 | 0.82 |
| 0.0 | 0.99 |
| FOG | Accelerometer | ||
|---|---|---|---|
| Constant errors | 0.006°/h | Constant errors | 50 µg |
| Random errors | 0.006°/ | Random errors | 50 µg |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Xu, X.; Liu, Y.; Zhang, T.; Li, Y.; Tong, J. An Adaptive Damping Network Designed for Strapdown Fiber Optic Gyrocompass System for Ships. Sensors 2017, 17, 494. https://doi.org/10.3390/s17030494
Sun J, Xu X, Liu Y, Zhang T, Li Y, Tong J. An Adaptive Damping Network Designed for Strapdown Fiber Optic Gyrocompass System for Ships. Sensors. 2017; 17(3):494. https://doi.org/10.3390/s17030494
Chicago/Turabian StyleSun, Jin, Xiaosu Xu, Yiting Liu, Tao Zhang, Yao Li, and Jinwu Tong. 2017. "An Adaptive Damping Network Designed for Strapdown Fiber Optic Gyrocompass System for Ships" Sensors 17, no. 3: 494. https://doi.org/10.3390/s17030494
APA StyleSun, J., Xu, X., Liu, Y., Zhang, T., Li, Y., & Tong, J. (2017). An Adaptive Damping Network Designed for Strapdown Fiber Optic Gyrocompass System for Ships. Sensors, 17(3), 494. https://doi.org/10.3390/s17030494