
Testing a Firefly-Inspired Synchronization Algorithm in a Complex Wireless Sensor Network


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- By using a discrete state vector instead of a continuous phase, the algorithm can be easily implemented on a Microcontroller Unit (MCU) in a wireless module.
- The step size can be adjusted, which ensures the stability according to the global convergence property of Markov chains without adjusting the coupling strength.
- A better performance emerges from the stochastic coupling at multiscale quantitative levels and the channel congestion is alleviated significantly.
2. Discrete Phase Dynamics
2.1. Discretization of a Single-Scale Quantitative Level
2.1.1. Integrating Dynamics
2.1.2. Coupling Dynamics
2.2. Discretization of Multiscale Quantitative Levels
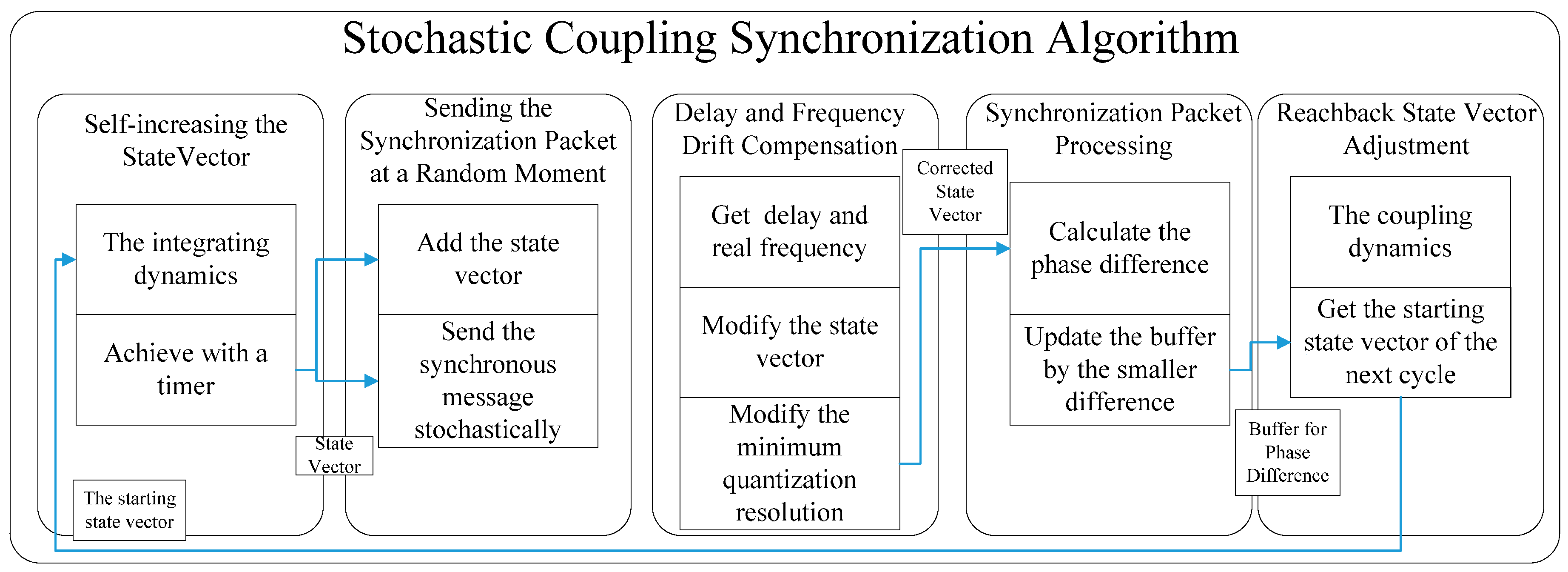
3. Stochastic Coupling Synchronization Algorithm
- Self-increasing the state vector.
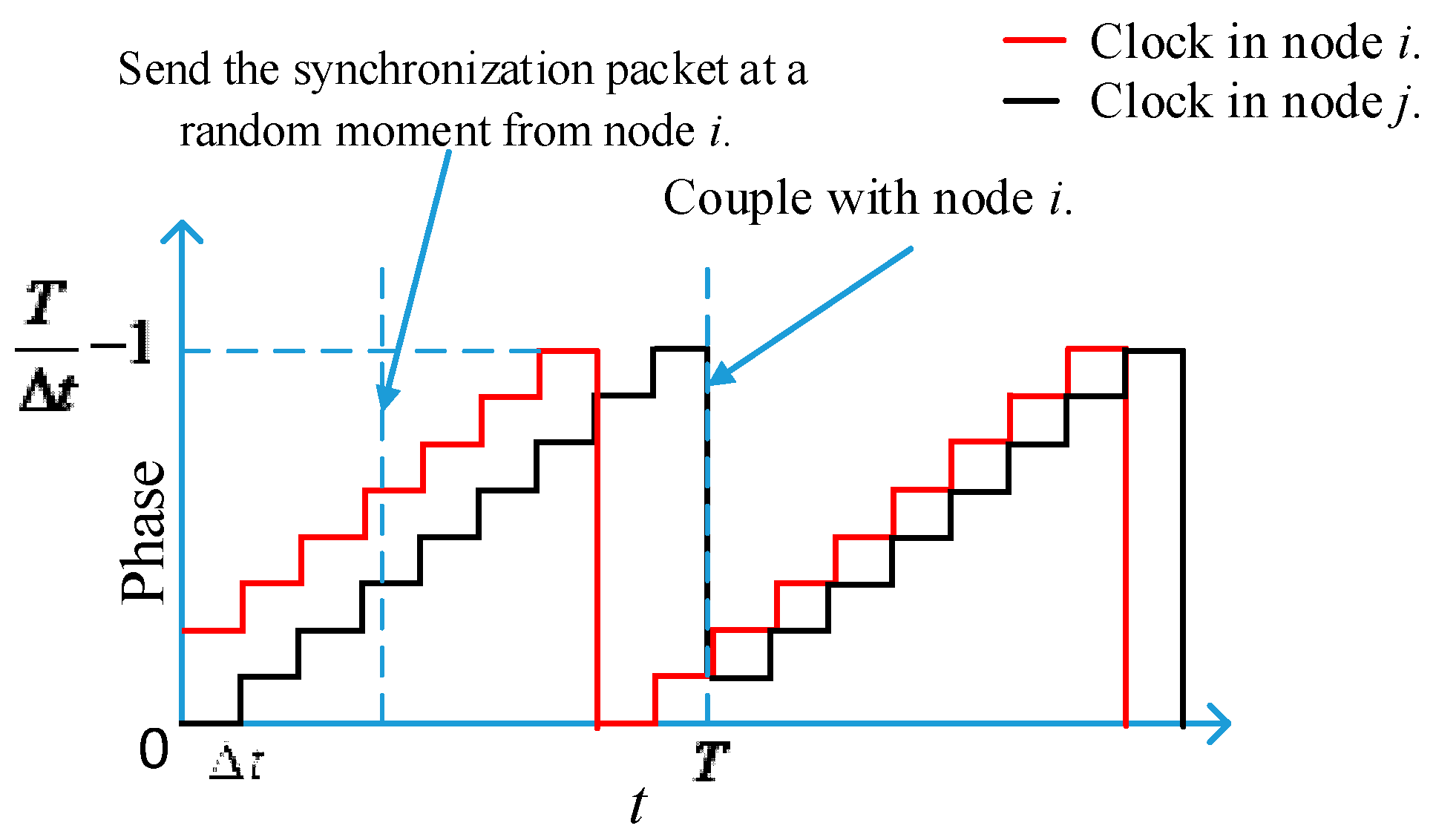
- Sending the synchronization packet at a random moment.
- Delay and frequency drift compensation.
- Synchronization packet processing.
- Reachback state vector adjustment.
3.1. Self-Increasing the State Vector
3.2. Sending the Synchronization Packet at a Random Moment
3.3. Delay and Frequency Drift Compensation
3.4. Synchronization Packet Processing
- Node j should record the local state vector jK exactly when receiving the synchronization packet of node i and get the corrected state vector by compensation as described in Section 3.3.
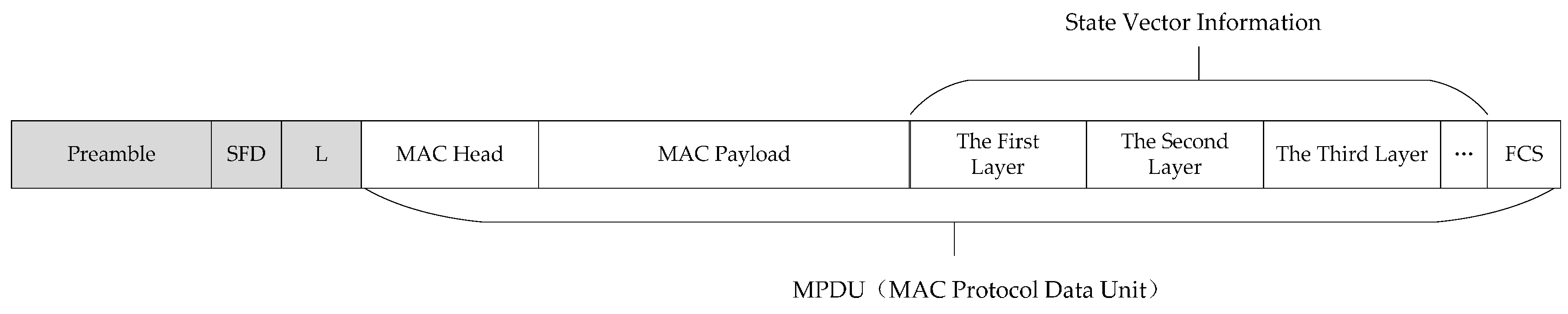
- Analyze the synchronization packet to obtain node i’s state vector iK.
- According to Equation (14) calculate the difference i−jDiff(iK,jK). Due to the discretization of phase, when the phase difference equal to 1 in a certain quantitative layer, the real continuous difference value should be less than the time resolution in this layer. So the difference should be reflected in the former layer which has a more precise time resolution. Thus, in order to prevent an oscillatory response between two adjacent layers when the synchronization is almost achieved, it should be equivalently converted to the former layer as shown in Equation (22):
- If i−jDiff(iK,jK) in Step 3 is out of the refractory interval, update the buffer i−jDiffbuf by the smaller difference between the one just obtained and the one stored in the buffer. Thus, after a period, the buffer only stores the difference of state vector that is the smallest in the period. That is to satisfy Equation (23):where RES is the resolution vector in Equation (8) and r is the length of the refractory interval in [28]. The phase difference in the buffer is used to provide input for the reachback state vector adjustment.
3.5. Reachback State Vector Adjustment
4. Stability
4.1. Stability of a Two-Node Network
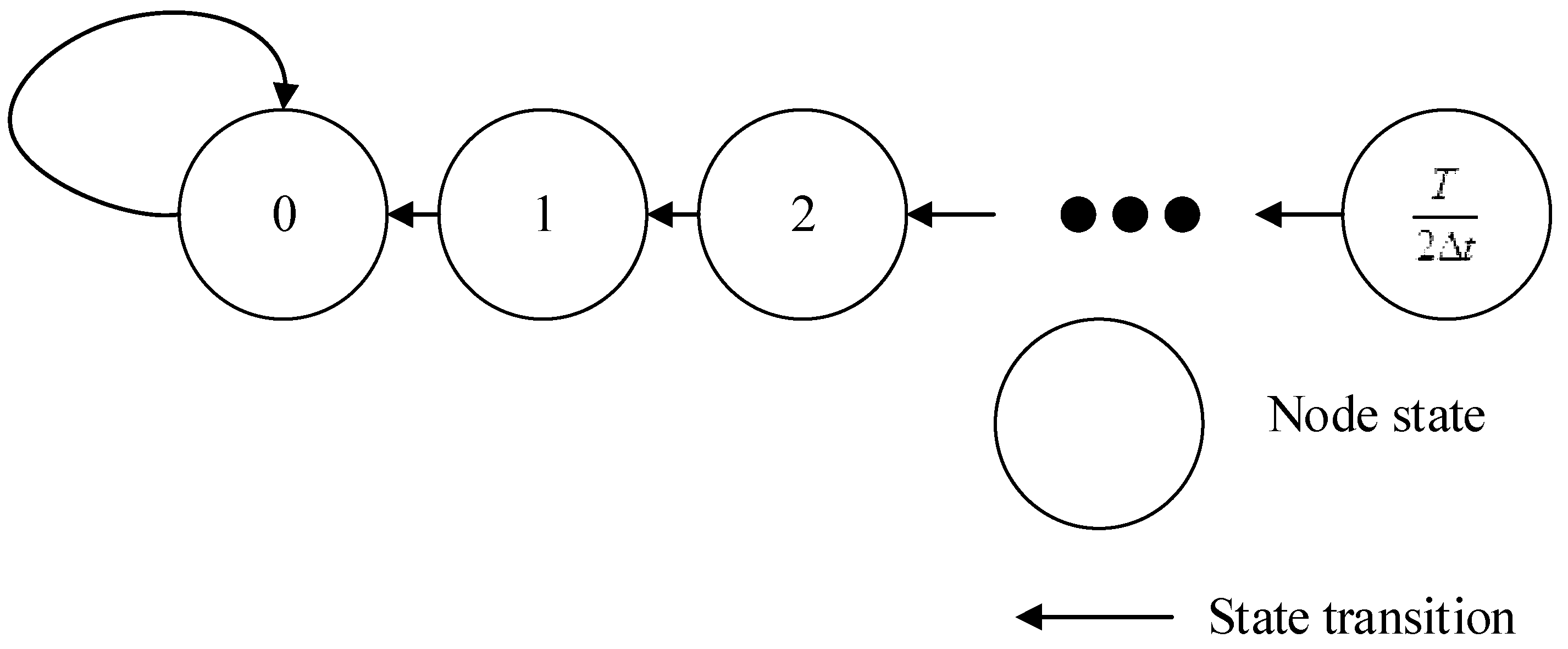
4.1.1. State Space of the System
4.1.2. One-Step Transition Probability Matrix
4.1.3. Proof of Stability
4.2. Stability of the Multi-Node Network
5. Simulation Verification
5.1. Simulation Parameters
5.2. Simulation Results
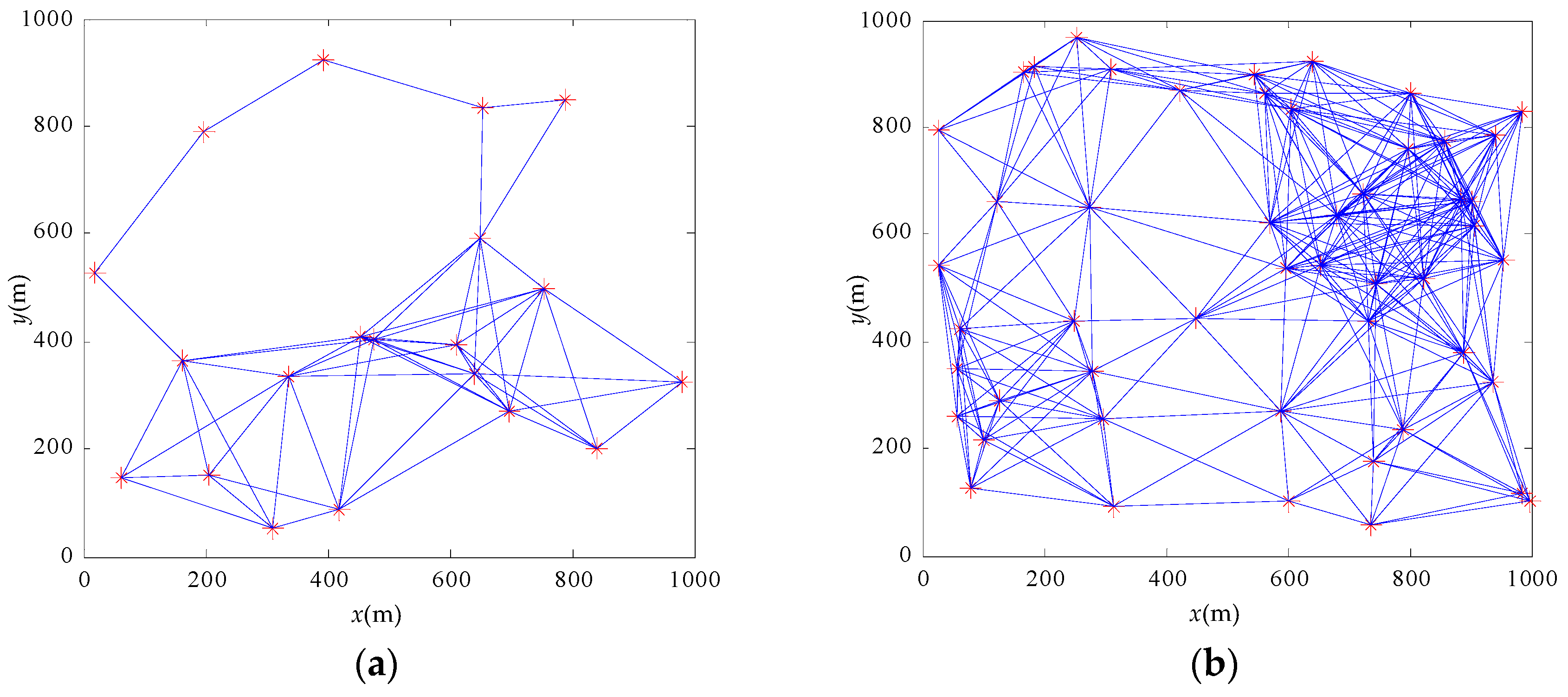
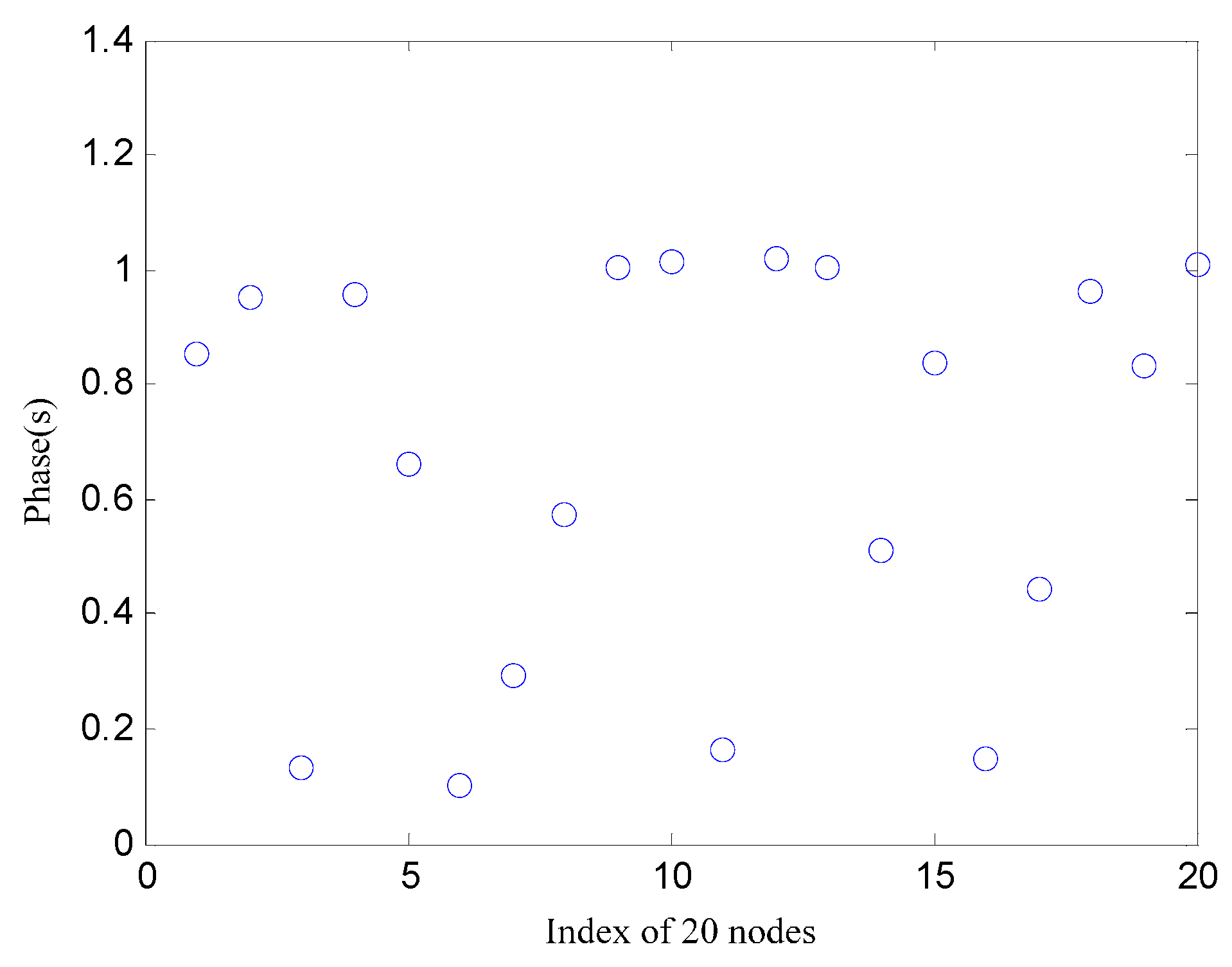
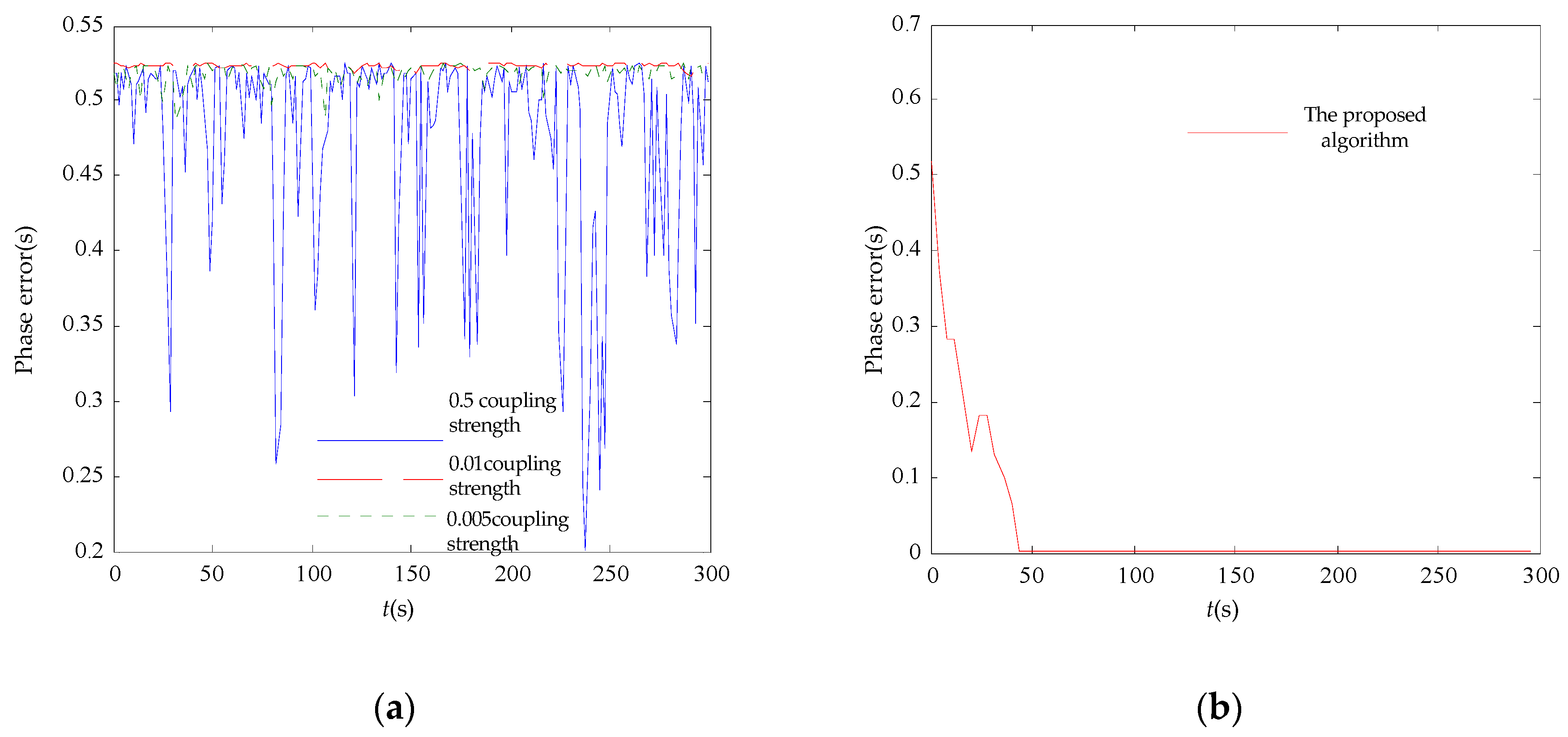
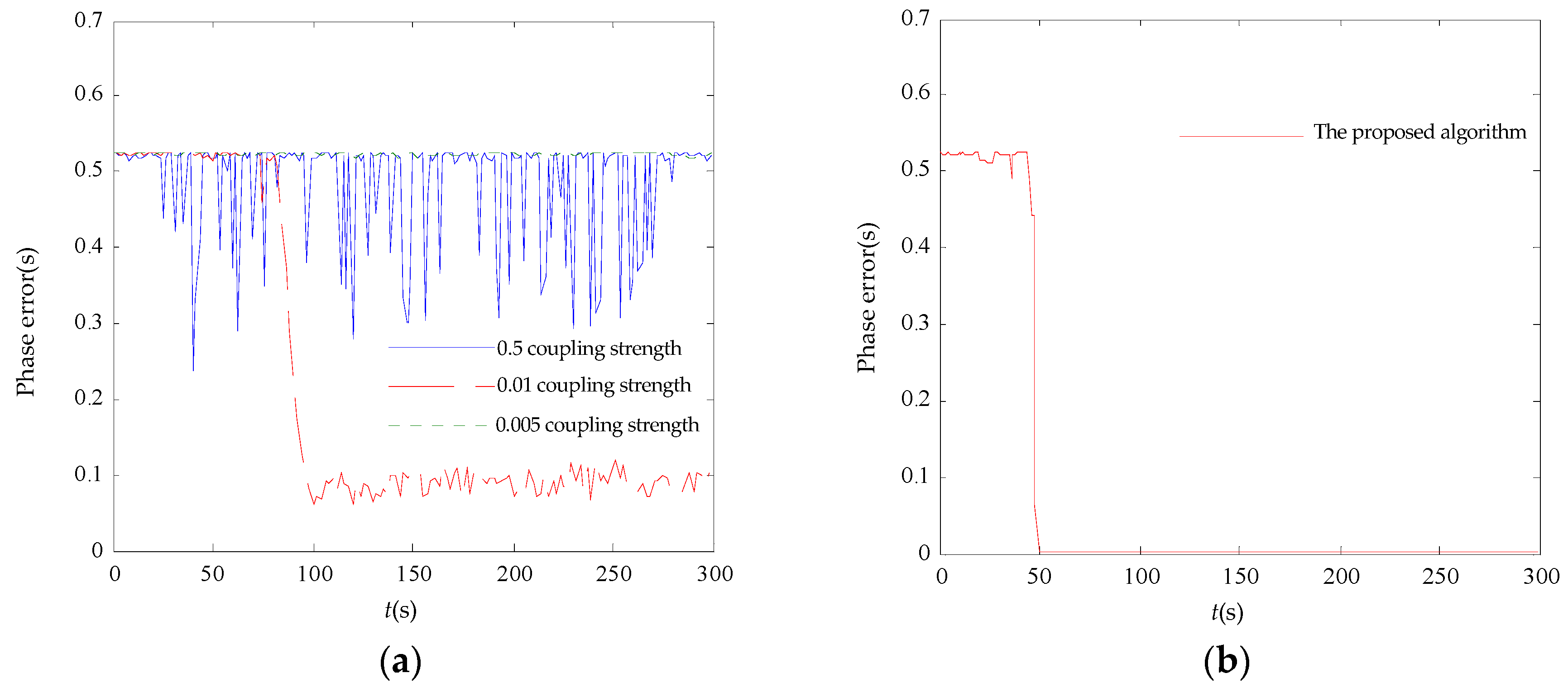
5.2.1. Contrast Test with 20 Nodes
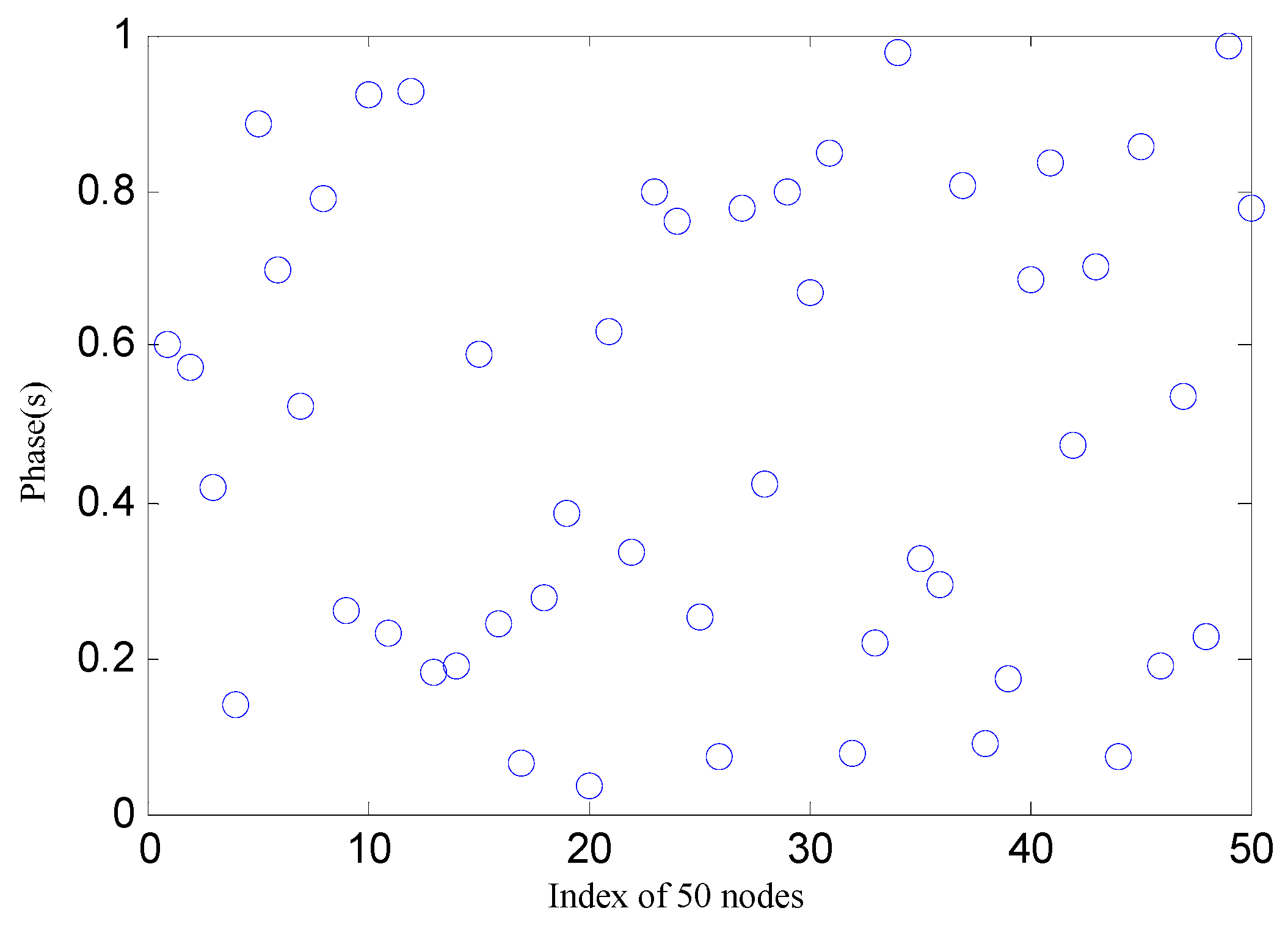
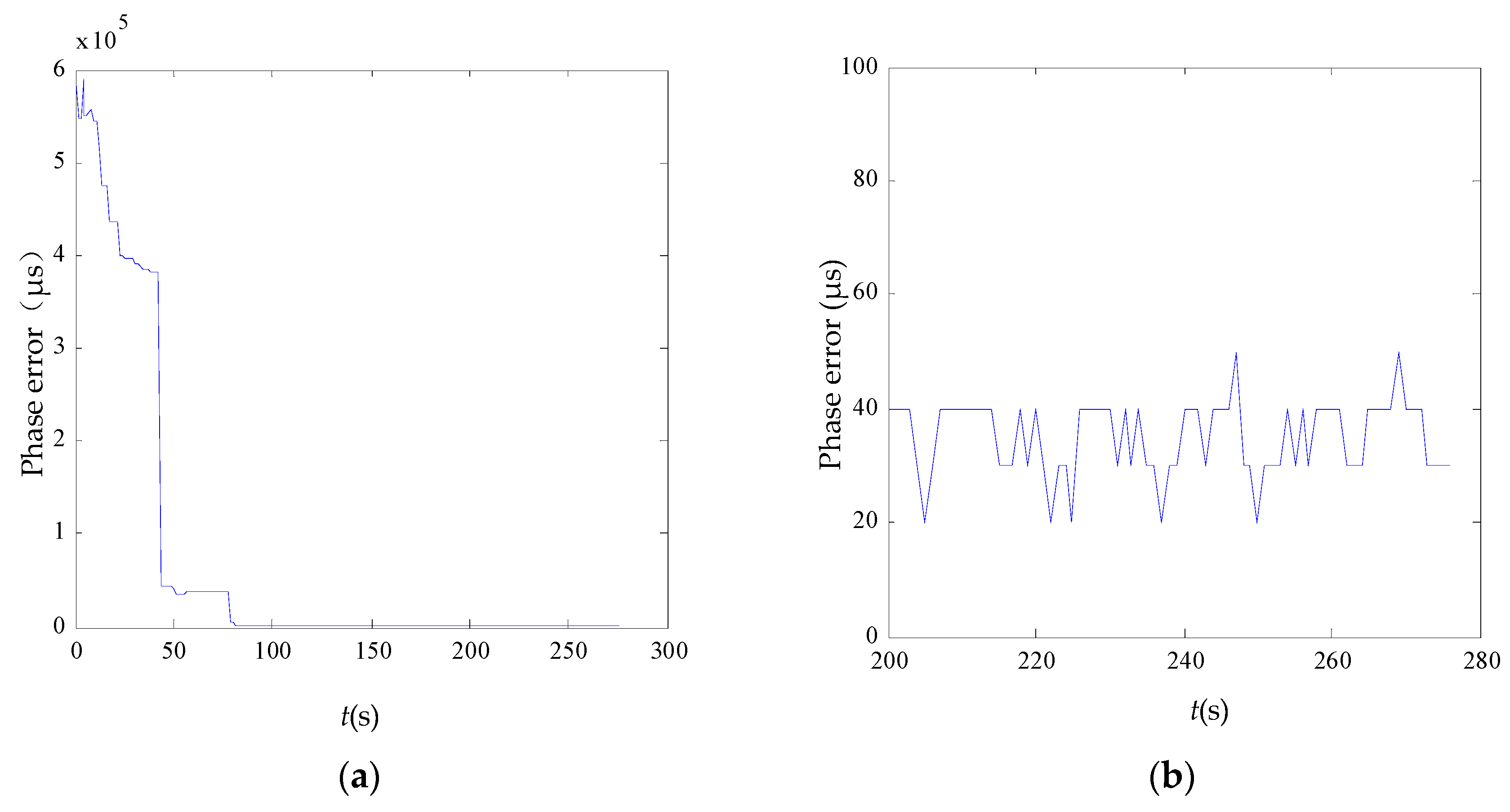
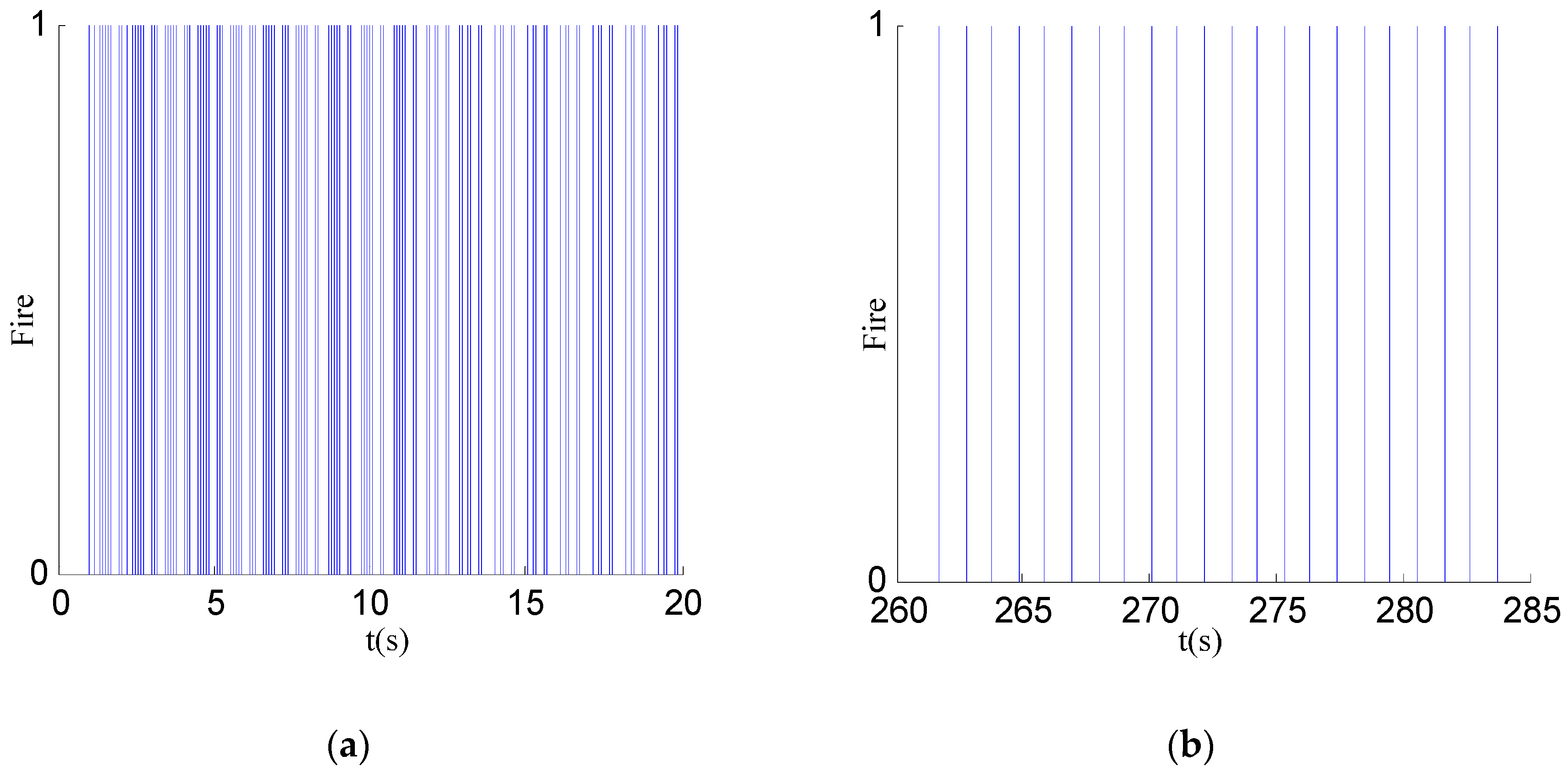
5.2.2. Contrast Test with 50 Nodes
5.3. Results Analysis and Discussion
5.3.1. Comparison with RFA
5.3.2. Comparison with Traditional Synchronization Protocols
5.3.3. Discussion on Power Consumption
6. Algorithm Verification on as Hardware Platform
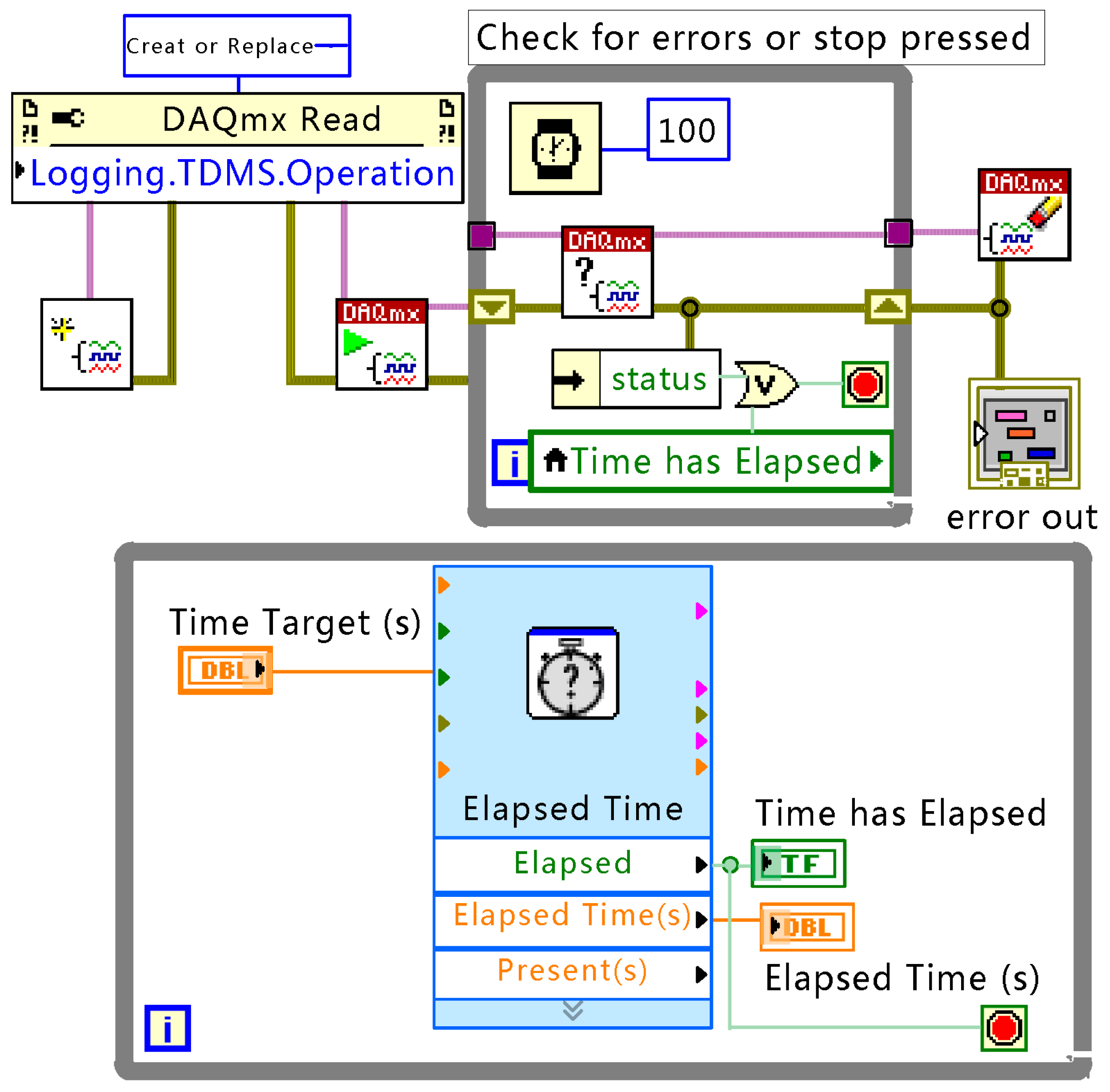
6.1. Hardware and Experiment Design
6.2. Experimental Results and Discussion
7. Conclusions and Extensions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kadlec, P.; Gabrys, B.; Strandt, S. Data-driven soft sensors in the process industry. Comput. Chem. Eng. 2009, 33, 795–814. [Google Scholar] [CrossRef]
- Budka, M.; Eastwood, M.; Gabrys, B.; Kadlec, P.; Salvador, M.M.; Schwan, S.; Tsakonas, A.; Zliobaite, I. From sensor readings to predictions: On the process of developing practical soft sensors. In Proceedings of the Advances in Intelligent Data Analysis XIII 13th International Symposium, Leuven, Belgium, 30 October–1 November 2014; Volume 8819, pp. 49–60.
- Averkin, A.N.; Belenki, A.G. Soft computing in wireless sensors networks. In Proceedings of the 5th European Society for Fuzzy Logic and Technology Conference, Ostrava, Czech Republic, 11–14 September 2007; pp. 387–390.
- Chi, Q.P.; Yan, H.R.; Zhang, C.; Pang, Z.B.; Xu, L.D. A reconfigurable smart sensor interface for industrial wsn in iot environment. IEEE Trans. Ind. Inf. 2014, 10, 1417–1425. [Google Scholar]
- Kumar, S.A.A.; Ovsthus, K.; Kristensen, L.M. An industrial perspective on wireless sensor networks—A survey of requirements, protocols, and challenges. IEEE Commun. Surv. Tutor. 2014, 16, 1391–1412. [Google Scholar] [CrossRef]
- Elson, J.; Girod, L.; Estrin, D. Fine-grained network time synchronization using reference broadcasts. In Proceedings of the 2002 Usenix Symposium on Operating Systems Design and Implementation (OSDI’02), Berkeley, CA, USA, 9–11 December 2002; USENIX Association: Berkeley, CA, USA; pp. 147–163.
- Ganeriwal, S.; Kumar, R.; Srivastava, M.B. Timing-sync protocol for sensor networks. In Proceedings of the First International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003; Association for Computing Machinery: Los Angeles, CA, USA; pp. 138–149.
- Xu, N.; Zhang, X.; Wang, Q.; Liang, J.; Pan, G.; Zhang, M. An improved flooding time synchronization protocol for industrial wireless networks. In Proceedings of the 2009 International Conference on Embedded Software and Systems, Hangzhou, China, 25–27 May 2009; IEEE Computer Society: Hangzhou, China; pp. 524–529.
- Djenouri, D.; Bagaa, M. Synchronization protocols and implementation issues in wireless sensor networks: A review. IEEE Syst. J. 2016, 10, 617–627. [Google Scholar] [CrossRef]
- Zhang, H.; Yue, D.; Yin, X.; Hu, S.; Dou, C.X. Finite-time distributed event-triggered consensus control for multi-agent systems. Inf. Sci. 2016, 339, 132–142. [Google Scholar] [CrossRef]
- Simeone, O.; Spagnolini, U.; Bar-Ness, Y.; Strogatz, S.H. Distributed synchronization in wireless networks. IEEE Signal Process. Mag. 2008, 25, 81–97. [Google Scholar] [CrossRef]
- Smith, H.M. Synchronous flashing of fireflies. Science 1935, 82, 151–152. [Google Scholar] [CrossRef] [PubMed]
- Peskin, C.S. Courant Institute of Mathematical Sciences. Mathematical Aspects of Heart Physiology; Courant Institute of Mathematical Sciences, New York University: New York, NY, USA, 1975. [Google Scholar]
- Izhikevich, E.M. Weakly pulse-coupled oscillators, fm interactions, synchronization, and oscillatory associative memory. IEEE Trans. Neural Netw. 1999, 10, 508–526. [Google Scholar] [CrossRef] [PubMed]
- Okuda, T.; Konishi, K.; Hara, N. Experimental verification of synchronization in pulse-coupled oscillators with a refractory period and frequency distribution. Chaos 2011, 21. [Google Scholar] [CrossRef] [PubMed]
- Klinglmayr, J.; Bettstetter, C. Self-organizing synchronization with inhibitory-coupled oscillators: Convergence and robustness. ACM Trans. Auton. Adapt. Syst. 2012, 7, 30. [Google Scholar] [CrossRef]
- Nunez, F.; Wang, Y.Q.; Doyle, F.J. Synchronization of pulse-coupled oscillators on (strongly) connected graphs. IEEE Trans. Autom. Control 2015, 60, 1710–1715. [Google Scholar] [CrossRef]
- Pruessner, G.; Cheang, S.; Jensen, H.J. Synchronization by small time delays. Phys. A Stat. Mech. Its Appl. 2015, 420, 8–13. [Google Scholar] [CrossRef]
- Núñez, F.; Wang, Y.; Teel, A.R.; Doyle, F.J. Synchronization of pulse-coupled oscillators to a global pacemaker. Syst. Control Lett. 2016, 88, 75–80. [Google Scholar] [CrossRef]
- Werner-Allen, G.; Tewari, G.; Patel, A.; Welsh, M.; Nagpal, R. Firefly-inspired sensor network synchronicity with realistic radio effects. In Proceedings of the 3rd International Conference on Embedded Networked Sensor Systems, San Diego, CA, USA, 2–4 November 2005; pp. 142–153.
- Arellano-Delgado, A.; Cruz-Hernández, C.; López Gutiérrez, R.M.; Posadas-Castillo, C. Outer synchronization of simple firefly discrete models in coupled networks. Math. Probl. Eng. 2015, 2015, 1–14. [Google Scholar] [CrossRef]
- Suedomi, Y.; Tamukoh, H.; Matsuzaka, K.; Tanaka, M.; Morie, T. Parameterized digital hardware design of pulse-coupled phase oscillator networks. Neurocomputing 2015, 165, 54–62. [Google Scholar] [CrossRef]
- Wang, J.Y.; Xu, C.; Feng, J.W.; Chen, M.Z.Q.; Wang, X.F.; Zhao, Y. Synchronization in moving pulse-coupled oscillator networks. IEEE Trans. Circuits Syst. I Regul. Pap. 2015, 62, 2544–2554. [Google Scholar] [CrossRef]
- Mangharam, R.; Rowe, A.; Rajkumar, R. Firefly: A cross-layer platform for real-time embedded wireless networks. Real-Time Syst. 2007, 37, 183–231. [Google Scholar] [CrossRef]
- Rubenstein, M.; Ahler, C.; Hoff, N.; Cabrera, A.; Nagpal, R. Kilobot: A low cost robot with scalable operations designed for collective behaviors. Robot. Auton. Syst. 2014, 62, 966–975. [Google Scholar] [CrossRef]
- Mirollo, R.E.; Strogatz, S.H. Synchronization of pulse-coupled biological oscillators. SIAM J. Appl. Math. 1990, 50, 1645–1662. [Google Scholar] [CrossRef]
- Leidenfrost, R.; Elmenreich, W. Firefly clock synchronization in an 802.15.4 wireless network. EURASIP J. Embed. Syst. 2009, 2009, 186406–186417. [Google Scholar] [CrossRef]
- Cui, L.; Wang, H. Reachback firefly synchronicity with late sensitivity window in wireless sensor networks. In Proceedings of the Ninth International Conference on Hybrid Intelligent Systems, Shenyang, China, 12–14 August 2009; pp. 451–456.
- Tyrrell, A.; Auer, G.; Bettstetter, C. Emergent slot synchronization in wireless networks. IEEE Trans. Mob. Comput. 2010, 9, 719–732. [Google Scholar] [CrossRef]
- Zhang, Z.S.; Long, K.P.; Wang, J.P.; Dressler, F. On swarm intelligence inspired self-organized networking: Its bionic mechanisms, designing principles and optimization approaches. IEEE Commun. Surv. Tutor. 2014, 16, 513–537. [Google Scholar] [CrossRef]
- LI, L.; Liu, Y.-P.; Yang, H.-Z.; Wang, H. Convergence analysis and accelerating design for distributed consensus time synchronization protocol in wireless sensor networks. J. Electron. Inf. Technol. 2010, 32, 2045–2051. [Google Scholar] [CrossRef]
- Hao, C.; Song, P.; Wu, J.; Yang, C. Multiscale cycle synchronization strategy for wsn based on firefly-inspired algorithm. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015.
- Product Brief-JN5148. Available online: http://www.nxp.com/documents/leaflet/JN5148_PB_1v4.pdf (accessed on 15 February 2017).
- National Instruments, Device Specifications Nation Instruments 6358. Available online: http://www.ni.com/pdf/manuals/374453c.pdf (accessed on 15 February 2017).













© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, C.; Song, P.; Yang, C.; Liu, X. Testing a Firefly-Inspired Synchronization Algorithm in a Complex Wireless Sensor Network. Sensors 2017, 17, 544. https://doi.org/10.3390/s17030544
Hao C, Song P, Yang C, Liu X. Testing a Firefly-Inspired Synchronization Algorithm in a Complex Wireless Sensor Network. Sensors. 2017; 17(3):544. https://doi.org/10.3390/s17030544
Chicago/Turabian StyleHao, Chuangbo, Ping Song, Cheng Yang, and Xiongjun Liu. 2017. "Testing a Firefly-Inspired Synchronization Algorithm in a Complex Wireless Sensor Network" Sensors 17, no. 3: 544. https://doi.org/10.3390/s17030544
APA StyleHao, C., Song, P., Yang, C., & Liu, X. (2017). Testing a Firefly-Inspired Synchronization Algorithm in a Complex Wireless Sensor Network. Sensors, 17(3), 544. https://doi.org/10.3390/s17030544