The Impact of Satellite Time Group Delay and Inter-Frequency Differential Code Bias Corrections on Multi-GNSS Combined Positioning


Abstract
:1. Introduction
2. Multi-GNSS TGDs/DCBs Correction Model
2.1. Methodology
2.2. Undifferenced Pseudorange Observation Equations
2.3. TGD/DCB Correction Model for Multi-GNSS
3. Data and Processing Strategy
4. Experimental Results and Analysis
4.1. Performance of SPP with Broadcast Ephemeris
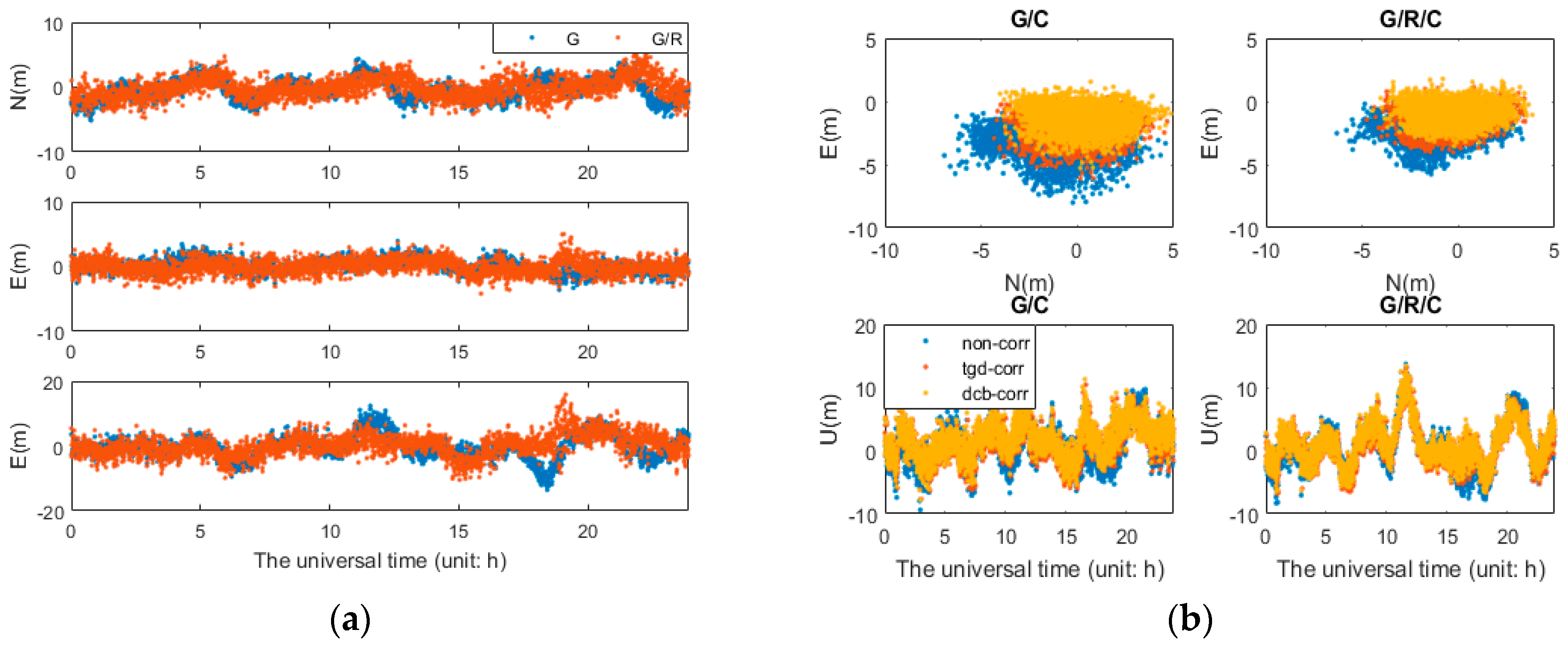
4.1.1. Single-Frequency
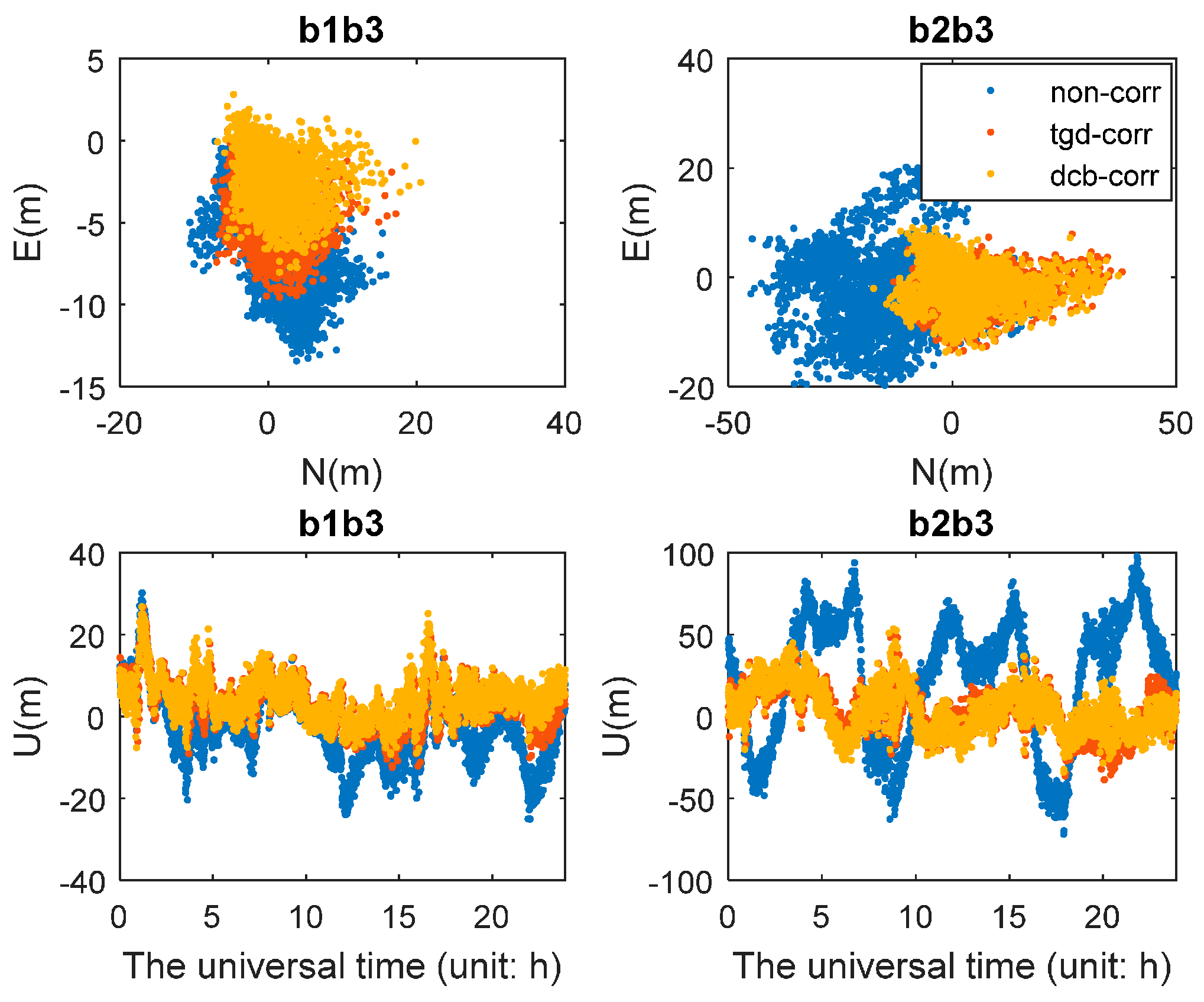
4.1.2. Dual-Frequency
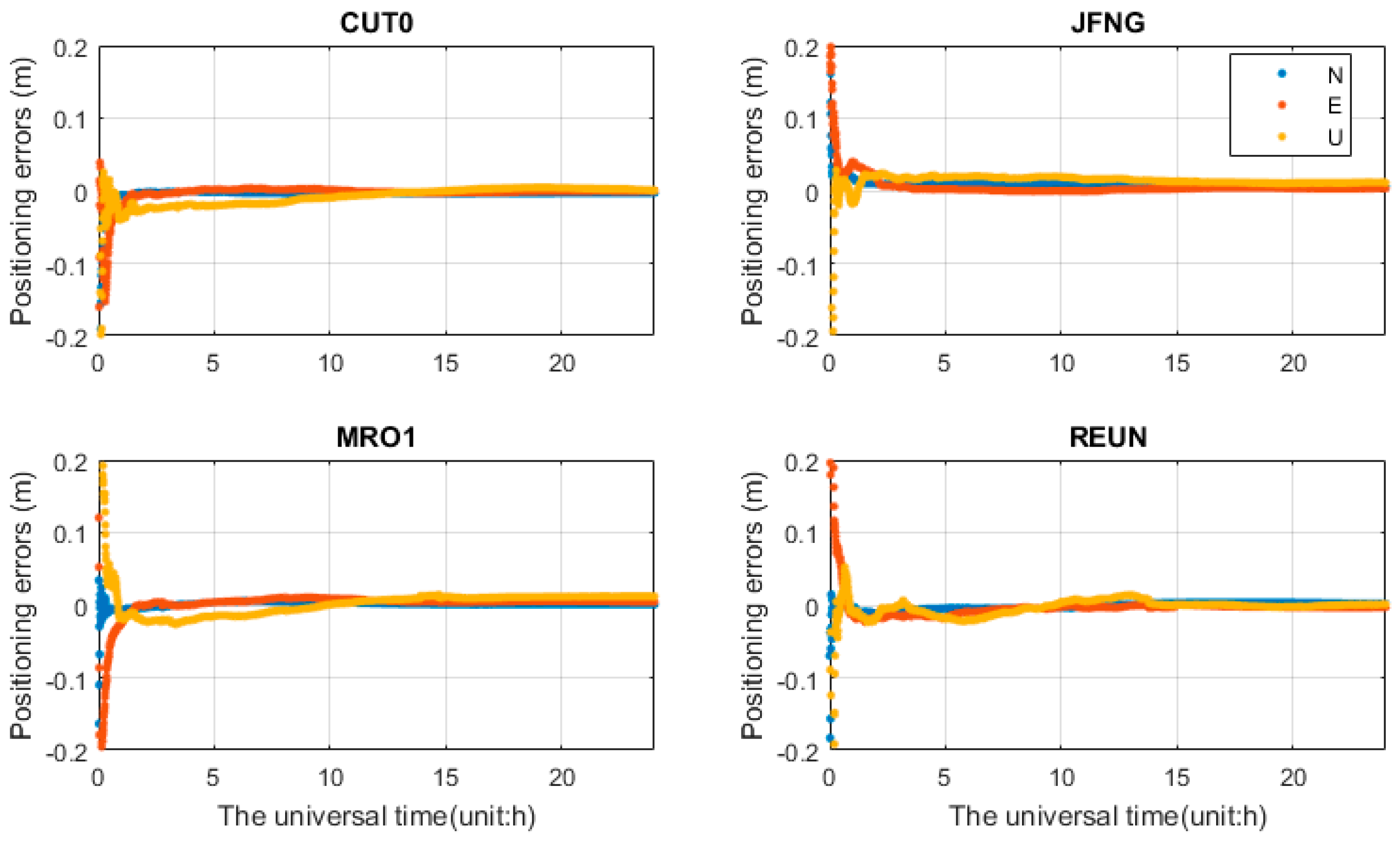
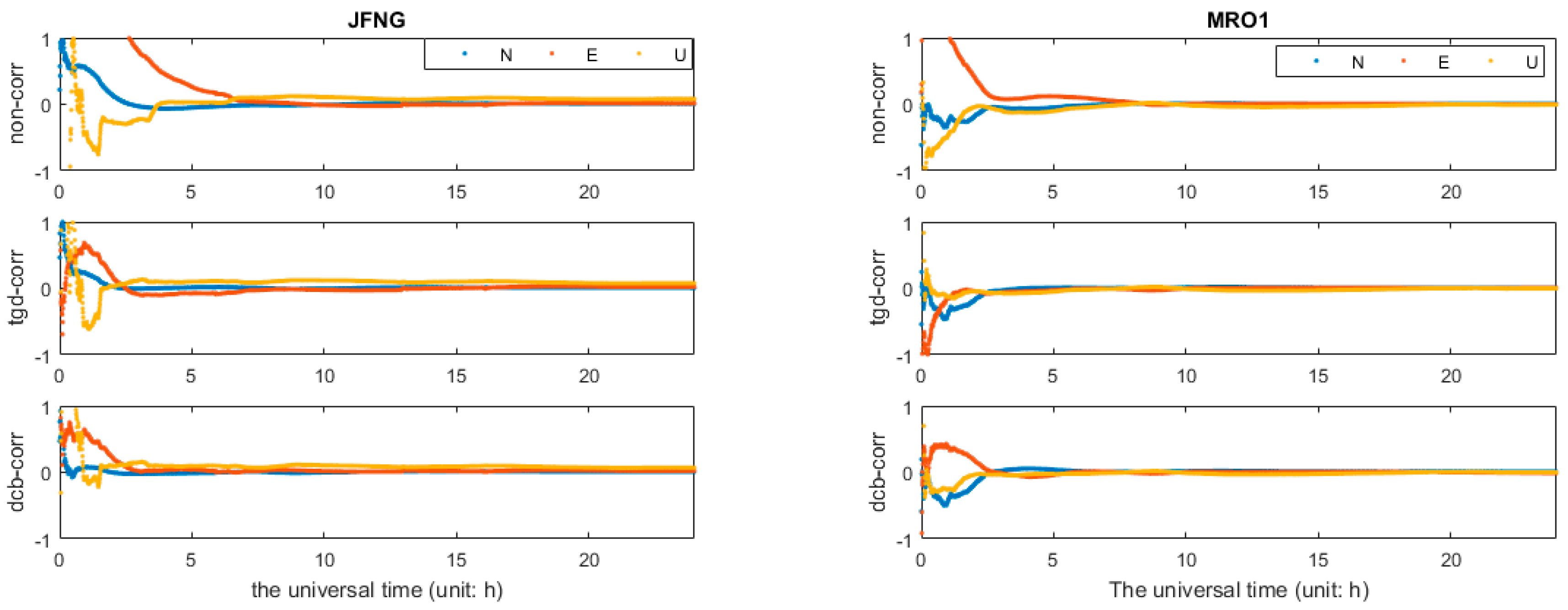
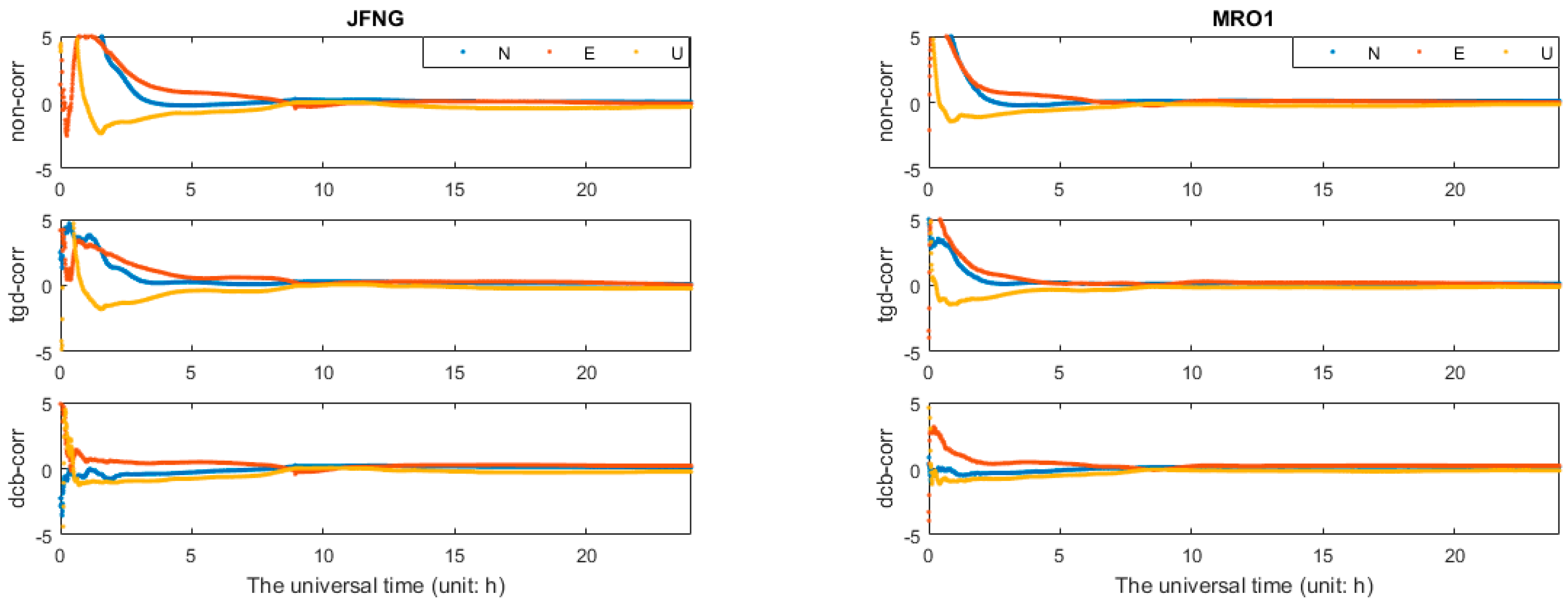
4.2. Performances of PPP
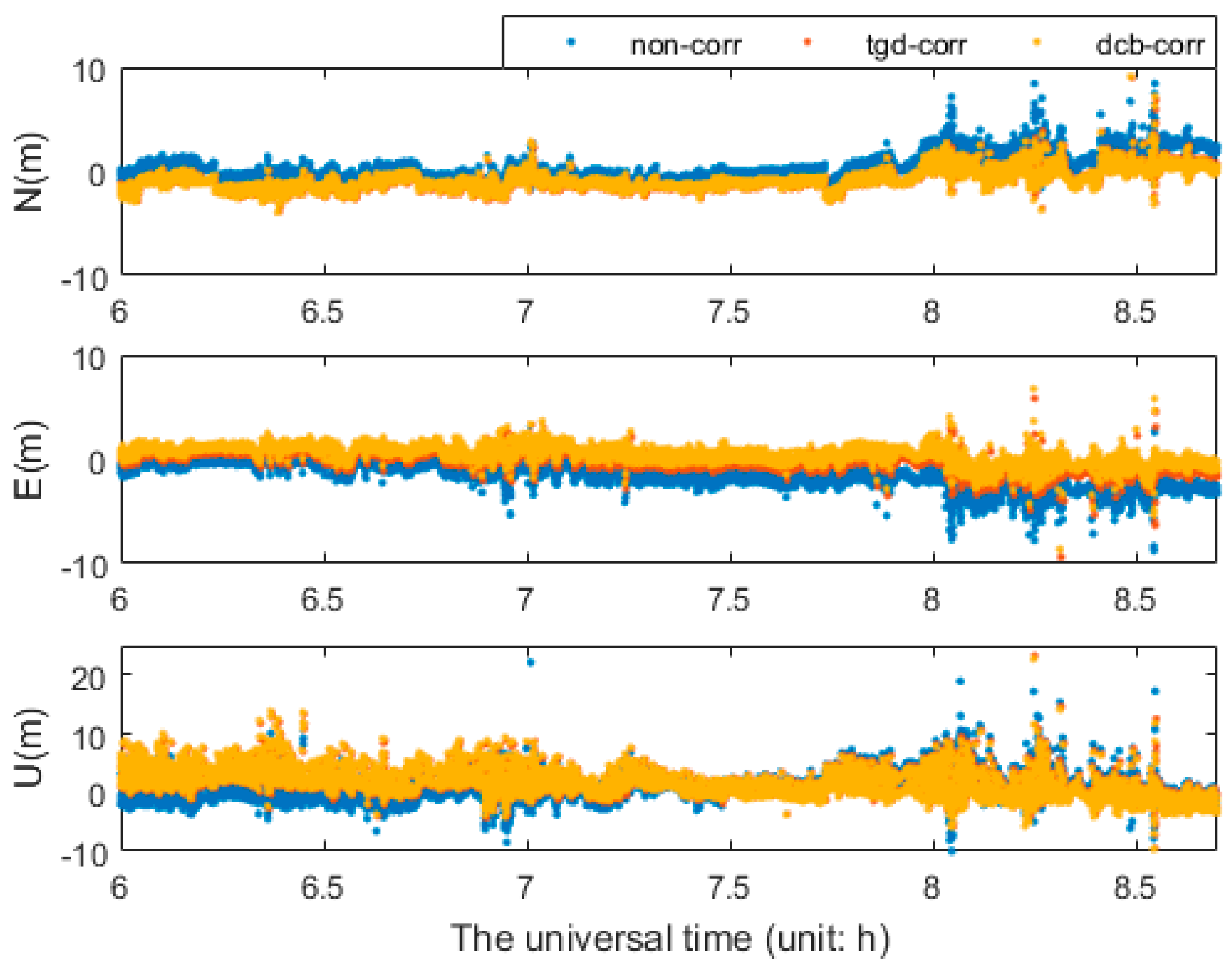
4.3. Kinematic Results and Analysis
5. Summary
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cai, C.; Gao, Y.; Pan, L.; Dai, W. An analysis on combined GPS/COMPASS data quality and its effect on single point positioning accuracy under different observing conditions. Adv. Space Res. 2014, 54, 818–829. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5, 8328. [Google Scholar] [CrossRef] [PubMed]
- Tegedor, J.; Øvstedal, O.; Vigen, E. Precise orbit determination and point positioning using GPS, Glonass, Galileo and BeiDou. J. Geod. Sci. 2014, 4, 65–73. [Google Scholar] [CrossRef]
- Teunissen, P.J.; Kleusberg, A. GPS for Geodesy; Springer: Berlin, Germany, 1996. [Google Scholar]
- Ge, M.; Chen, J.; Douša, J.; Gendt, G.; Wickert, J. A computationally efficient approach for estimating high-rate satellite clock corrections in realtime. GPS Solut. 2011, 16, 9–17. [Google Scholar] [CrossRef]
- Ray, J.; Senior, K. Geodetic techniques for time and frequency comparisons using GPS phase and code measurements. Metrologia 2005, 42, 215–232. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A. Code Biases in Multi-GNSS Point Positioning. In Proceedings of the 2013 ION International Technical Meeting, San Diego, CA, USA, 29–27 January 2013; pp. 616–628.
- The Receiver Independent Exchange Format (RINEX) Version 3.02. Available online: ftp://igs.org/pub/data/format/rinex302.pdf (accessed on 6 March 2017).
- Montenbruck, O.; Steigenberger, P. The BeiDou Navigation Message. J. Glob. Position Syst. 2013, 12, 1–12. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, X.; Wang, J. Timing group delay and differential code bias corrections for BeiDou positioning. J. Geod. 2015, 89, 427–445. [Google Scholar] [CrossRef]
- Zhao, Q.; Guo, J.; Li, M.; Qu, L.; Hu, Z.; Shi, C.; Liu, J. Initial results of precise orbit and clock determination for COMPASS navigation satellite system. J. Geod. 2013, 87, 475–486. [Google Scholar] [CrossRef]
- Deng, Z.; Zhao, Q.; Springer, T.; Prange, L.; Uhlemann, M. Orbit and clock determination-BeiDou. In Proceedings of the IGS workshop, Pasadena, CA, USA, 23–27 June 2014; pp. 23–27.
- Wu, X.; Hu, X.; Wang, G.; Zhong, H.; Tang, C. Evaluation of COMPASS ionospheric model in GNSS positioning. Adv. Space Res. 2013, 51, 959–968. [Google Scholar] [CrossRef]
- Coker, C. Variability of GPS satellite differential group delay biases. IEEE Trans. Aerosp. Electron. Syst. 1991, 27, 931–938. [Google Scholar]
- Sardón, E.; Zarraoa, N. Estimation of total electron content using GPS data: How stable are the differential satellite and receiver instrumental biases? Radio Sci. 1997, 32, 1899–1910. [Google Scholar] [CrossRef]
- Schaer, S.; Steigenberger, P. Determination and use of GPS differential code bias values. In Proceedings of the IGS Workshop, Sydney, Australia, 8–12 February 2006; pp. 8–11.
- Li, Z.; Yuan, Y.; Li, H.; Ou, J.; Huo, X. Two-step method for the determination of the differential code biases of COMPASS satellites. J. Geod. 2012, 86, 1059–1076. [Google Scholar] [CrossRef]
- Feltens, J. The activities of the Ionosphere Working Group of the International GPS Service (IGS). GPS Solut. 2003, 7, 41–46. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.M.; Sanz, J.; Orus, R.; Garcia-Rigo, A.; Feltens, J.; Komjathy, A.; Schaer, S.C.; Krankowski, A. The IGS VTEC maps: A reliable source of ionospheric information since 1998. J. Geod. 2009, 83, 263–275. [Google Scholar] [CrossRef]
- Montenbruck, O.S.P.; Hauschild, A. IGS-MGEX: Preparing the ground for multi-constellation GNSS science. Espace 2014, 9, 42–49. [Google Scholar]
- Dow, J.M.; Neilan, R.E.; Rizos, C. The International GNSS Service in a changing landscape of Global Navigation Satellite Systems. J. Geod. 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P. 2014-Differential code bias estimation using multi-gnss observations and global ionosphere maps. Navigation 2014, 61, 191–201. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Hauschild, A. Broadcast versus precise ephemerides: A multi-GNSS perspective. GPS Solut. 2014, 19, 321–333. [Google Scholar] [CrossRef]
- Schaer, S. Overview of GNSS biases. In Proceedings of the Workshop on GNSS Biases, Bern, Switzerland, 18–19 January 2012.
- Cai, C.; Gao, Y.; Pan, L.Z.; Zhu, J.J. Precise point positioning with quad-constellations: GPS, BeiDou, GLONASS and Galileo. Adv. Space Res. 2015, 56, 133–143. [Google Scholar] [CrossRef]
- Boehm, J.; Heinkelmann, R.; Schuh, H. Short Note: A global model of pressure and temperature for geodetic applications. J. Geod. 2007, 81, 679–683. [Google Scholar] [CrossRef]
- CSNO. BeiDou Navigation Satellite System Signal in Space Interface Control Document—Open Service Signal; version 2.0; China Satellite Navigation Office: Beijing, China, 2013.
- Nava, B.; Coïsson, P.; Radicella, S.M. A new version of the NeQuick ionosphere electron density model. J. Atmos. Sol. Terr. Phys. 2008, 70, 1856–1862. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS Conventions 2010; Bureau International des Poids et Mesures: Sevres, France, 2010. [Google Scholar]
- Wu, J.T.; Wu, S.C.; Hajj, G.A.; Bertiger, W.I.; Lichten, S.M. Effects of antenna orienation on GPS carrier phase. In Proceedings of the AAS/AIAA Astrodynamics Conference, Durango, CO, USA, 19–22 August 1992; pp. 1647–1660.
- Rizos, C.; Montenbruck, O.; Weber, R.; Weber, G.; Neilan, R.; Hugentobler, U. The IGS MGEX experiment as a milestone for a comprehensive multi-GNSS service. In Proceedings of the ION PNT Meeting, Honolulu, HI, USA, 23–25 April 2013.
- Ge, Y.; Sun, B.; Wang, S.; Shen, P.; Liu, J. Convergence Time Analysis of Multi-constellation Precise Point Positioning Based on iGMAS Products. In China Satellite Navigation Conference (CSNC) 2016 Proceedings: Volume III; Springer: Singapore, 2016; Volume 390, pp. 297–306. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Descriptions |
|---|---|
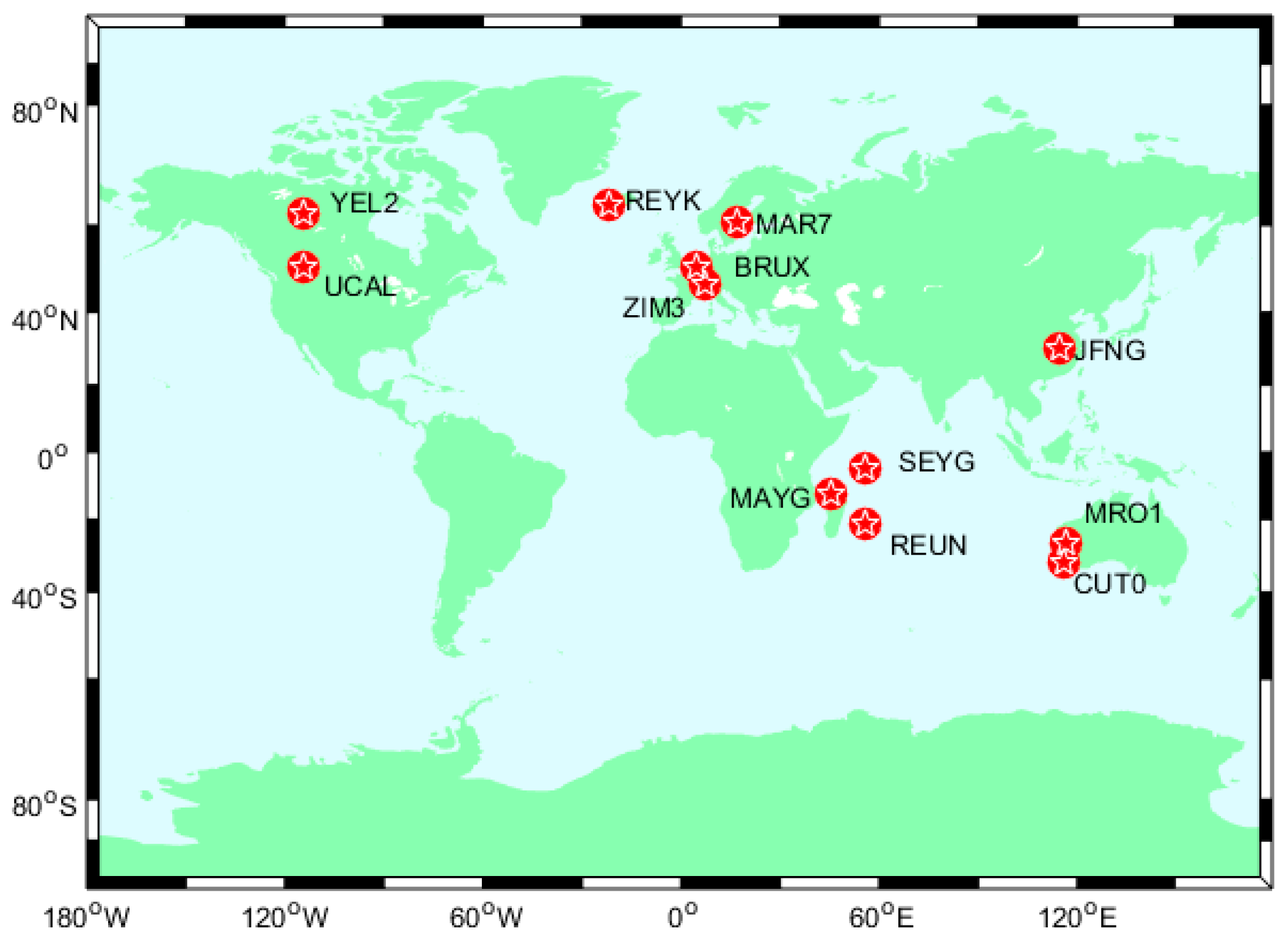
| Number of stations | 12 |
| Date span | 1–30 May 2015; 1–30 July 2016 |
| Signal selection | GPS: L1/L2/L5; GLONASS: L1/L2; BeiDou: B1/B2/B3; Galileo: E1/E5a/E5b |
| Sampling interval | 30 s |
| Elevation cut off | 10° |
| Time system | GPS time |
| Tropospheric delay | Dry component: corrected with GPT model [26], wet component: estimated as random-walk process, GMF mapping function applied. |
| First order ionospheric delay | Single-frequency SPP: |
| GPS/GLONASS: Klobuchar model | |
| BDS: Klobuchar model [27] | |
| Galileo: The NeQuick model [28] | |
| Dual-frequency: First order eliminated by ionosphere-free combination | |
| Relativistic effect | IERS2010 [29] |
| Sagnac effect | IERS2010 [29] |
| Phase wind-up effect | Corrected [30] |
| Satellite PCO and PCV | GPS and GLONASS: Fixed to igs08_1861.atx values; |
| Tide displacement | IERS2010 [29] |
| Station reference coordinates | IGS SINEX solutions or daily GPS-only PPP solutions |
| Different Constellation Combinations | Proc. Mode | Combination | Schemes | Comments |
|---|---|---|---|---|
| G, C, E, | SPP | Single-freq: b1, b2, b3; | non-corr | non-corr: pseudorange without TGDs or DCBs corrections |
| G/R, | ||||
| G/C, | dual-freq: b1b2, b1b3, b2b3 | tgd-corr | tgd-corr: TGD corrected | |
| G/R/C, | PPP | |||
| G/C/E, | dual-freq: b1b2, b1b3, b2b3 | dcb-corr | dcb-corr: DCB corrected | |
| G/R/C/E |
| Combinations | Scheme | b1 | b2 | b3 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| N | E | U | N | E | U | N | E | U | ||
| G | non-corr | 2.712 | 1.830 | 7.170 | 4.455 | 2.937 | 11.477 | - | - | - |
| G | tgd-corr | 1.912 | 1.319 | 5.456 | 2.842 | 1.284 | 8.091 | - | - | - |
| G | dcb-corr | 2.034 | 1.269 | 5.254 | 2.676 | 1.363 | 6.186 | - | - | - |
| E | non-corr | 10.00 | 7.60 | 16.74 | 9.61 | 8.84 | 18.05 | 9.67 | 8.84 | 17.93 |
| E | tgd-corr | 5.41 | 4.03 | 11.03 | 6.25 | 4.75 | 13.36 | 5.68 | 4.37 | 11.84 |
| E | dcb-corr | 5.12 | 3.90 | 10.92 | 5.76 | 4.53 | 12.77 | 5.49 | 4.27 | 11.95 |
| G/C | non-corr | 2.125 | 1.805 | 6.251 | 3.313 | 2.403 | 9.843 | 4.044 | 3.836 | 11.458 |
| G/C | tgd-corr | 1.891 | 1.286 | 5.639 | 2.761 | 1.483 | 8.385 | - | - | - |
| G/C | dcb-corr | 1.791 | 1.312 | 5.491 | 2.528 | 1.528 | 6.437 | - | - | - |
| G/R | non-corr | 2.413 | 1.710 | 6.307 | 3.293 | 1.729 | 8.581 | - | - | - |
| G/R | tgd-corr | 2.250 | 1.349 | 5.838 | 3.293 | 1.729 | 8.581 | - | - | - |
| G/R | dcb-corr | 2.112 | 1.202 | 5.299 | 2.759 | 1.381 | 6.352 | - | - | - |
| G/R/C | non-corr | 2.074 | 1.665 | 5.915 | 3.033 | 2.179 | 9.038 | - | - | - |
| G/R/C | tgd-corr | 2.062 | 1.382 | 5.678 | 3.032 | 1.694 | 8.432 | - | - | - |
| G/R/C | dcb-corr | 1.740 | 1.230 | 5.327 | 2.588 | 1.442 | 6.335 | - | - | - |
| G/C/E | non-corr | 2.150 | 1.741 | 6.040 | 3.441 | 2.570 | 7.212 | 3.910 | 3.711 | 10.956 |
| G/C/E | tgd-corr | 1.759 | 0.973 | 5.347 | 2.412 | 1.193 | 6.193 | 3.899 | 3.670 | 10.944 |
| G/C/E | dcb-corr | 1.630 | 0.814 | 5.189 | 2.294 | 1.035 | 6.225 | 3.830 | 3.634 | 10.912 |
| G/R/C/E | non-corr | 1.885 | 1.367 | 5.493 | 2.977 | 2.106 | 6.726 | |||
| G/R/C/E | tgd-corr | 1.755 | 0.990 | 5.335 | 2.396 | 1.175 | 6.160 | |||
| G/R/C/E | dcb-corr | 1.610 | 0.801 | 5.177 | 2.246 | 0.913 | 6.120 | |||
| Combinations | Scheme | b1b2 | b1b3 | b2b3 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| N | E | U | N | E | U | N | E | U | ||
| G | non-corr | 1.431 | 1.320 | 3.450 | - | - | - | - | - | - |
| G/C | non-corr | 1.558 | 2.040 | 2.955 | 4.199 | 6.131 | 9.651 | 20.609 | 14.518 | 42.372 |
| G/C | tgd-corr | 1.347 | 1.523 | 2.840 | 2.775 | 4.879 | 6.824 | 8.059 | 10.672 | 17.466 |
| G/C | dcb-corr | 1.322 | 1.282 | 2.798 | 2.650 | 3.230 | 5.480 | 5.808 | 5.470 | 7.858 |
| G/R | non-corr | 1.379 | 1.289 | 3.435 | - | - | - | - | - | - |
| G/R/C | non-corr | 1.391 | 1.736 | 2.955 | - | - | - | - | - | - |
| G/R/C | tgd-corr | 1.253 | 1.352 | 2.864 | - | - | - | - | - | - |
| G/R/C | dcb-corr | 1.196 | 1.171 | 2.716 | - | - | - | - | - | - |
| G/C/E | non-corr | 1.387 | 0.992 | 3.251 | 3.91 | 5.823 | 9.456 | 20.412 | 14.312 | 20.495 |
| G/C/E | tgd-corr | - | - | - | - | - | - | 7.821 | 8.389 | 14.926 |
| G/C/E | dcb-corr | - | - | - | - | - | - | 5.165 | 5.060 | 7.361 |
| G/R/C/E | non-corr | 0.763 | 0.768 | 2.612 | - | - | - | - | - | - |
| Combinations | Scheme | b1b2 | b1b3 | b2b3 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| N | E | U | N | E | U | N | E | U | ||
| G | non-corr | 0.008 | 0.013 | 0.023 | - | - | - | - | - | - |
| C | non-corr | 0.019 | 0.033 | 0.056 | 0.070 | 0.111 | 0.182 | 0.238 | 0.241 | 0.456 |
| C | tgd-corr | - | - | - | 0.072 | 0.105 | 0.182 | 0.156 | 0.203 | 0.421 |
| C | dcb-corr | - | - | - | 0.071 | 0.106 | 0.166 | 0.142 | 0.180 | 0.398 |
| G/R | non-corr | 0.008 | 0.013 | 0.024 | - | - | - | - | - | - |
| G/C | non-corr | 0.008 | 0.012 | 0.022 | 0.058 | 0.093 | 0.139 | 0.226 | 0.209 | 0.433 |
| G/C | tgd-corr | - | - | - | 0.046 | 0.079 | 0.108 | 0.141 | 0.192 | 0.401 |
| G/C | dcb-corr | - | - | - | 0.041 | 0.046 | 0.103 | 0.138 | 0.172 | 0.379 |
| G/R/C | non-corr | 0.009 | 0.014 | 0.024 | - | - | - | - | - | - |
| G/C/E | non-corr | 0.012 | 0.025 | 0.034 | 0.041 | 0.070 | 0.107 | 0.203 | 0.208 | 0.413 |
| G/C/E | tgd-corr | - | - | - | 0.039 | 0.070 | 0.097 | 0.140 | 0.189 | 0.391 |
| G/C/E | dcb-corr | - | - | 0.037 | 0.065 | 0.093 | 0.135 | 0.170 | 0.375 | |
| G/R/C/E | non-corr | 0.009 | 0.014 | 0.025 | - | - | - | - | - | - |
| G/R/C | b1 | b2 | b1b2 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| N | E | U | N | E | U | N | E | U | |
| non-corr | 3.425 | 2.583 | 10.220 | 4.227 | 2.757 | 12.794 | 3.353 | 3.357 | 2.725 |
| tgd-corr | 2.504 | 1.309 | 8.610 | 3.612 | 1.755 | 9.691 | 1.168 | 0.936 | 2.485 |
| dcb-corr | 2.009 | 1.009 | 8.590 | 3.760 | 1.264 | 9.035 | 1.213 | 0.916 | 2.444 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, Y.; Zhou, F.; Sun, B.; Wang, S.; Shi, B. The Impact of Satellite Time Group Delay and Inter-Frequency Differential Code Bias Corrections on Multi-GNSS Combined Positioning. Sensors 2017, 17, 602. https://doi.org/10.3390/s17030602
Ge Y, Zhou F, Sun B, Wang S, Shi B. The Impact of Satellite Time Group Delay and Inter-Frequency Differential Code Bias Corrections on Multi-GNSS Combined Positioning. Sensors. 2017; 17(3):602. https://doi.org/10.3390/s17030602
Chicago/Turabian StyleGe, Yulong, Feng Zhou, Baoqi Sun, Shengli Wang, and Bo Shi. 2017. "The Impact of Satellite Time Group Delay and Inter-Frequency Differential Code Bias Corrections on Multi-GNSS Combined Positioning" Sensors 17, no. 3: 602. https://doi.org/10.3390/s17030602
APA StyleGe, Y., Zhou, F., Sun, B., Wang, S., & Shi, B. (2017). The Impact of Satellite Time Group Delay and Inter-Frequency Differential Code Bias Corrections on Multi-GNSS Combined Positioning. Sensors, 17(3), 602. https://doi.org/10.3390/s17030602