
An EM Induction Hi-Speed Rotation Angular Rate Sensor

Abstract
:1. Introduction
2. Design Principle of the Rotating Body Angular Rate Sensor
2.1. Coil Layout of the Magnetic Induction Sensor
2.2. Magnetic Field Response When the Magnetic Induction Sensor Rotates
- (1)
- When Coil Xc rotates at an angular speed of about the X-axis of the carrier coordinate system, is normal to Coil Xc, so the flux through Coil Xc remains constant, with no induced voltage output; Coil Xc rotates about the X-axis and is in parallel with plane , and neither nor penetrate Coil Xc, with no flux resulted, so Coil Xc has a magnetic flux:
- (2)
- When Coil Xc rotates at an angular speed of about the Y-axis of the carrier coordinate system, in the initial position is normal to Coil Xc, so the flux is maximum, and when the coil rotates to coincide with plane the flux is 0; when is in parallel with Xc, no flux results; in the initial position, is in parallel with Coil Xc and the magnetic flux is 0, and when Coil Xc rotates to coincide with , the flux becomes maximum and Coil Xc a magnetic flux:
- (3)
- When Coil Xc rotates at an angular speed of about the -axis of the carrier coordinate system, in the initial position, is normal to Coil Xc, so the flux is maximum, and when the coil rotates to coincide with plane the flux is 0; in the initial position, is in parallel with Xc and no flux results, and when Coil Xc rotates to coincide with the flux becomes maximum; when is in parallel with Coil Xc, the magnetic flux become zero and Coil Xc has a magnetic flux:
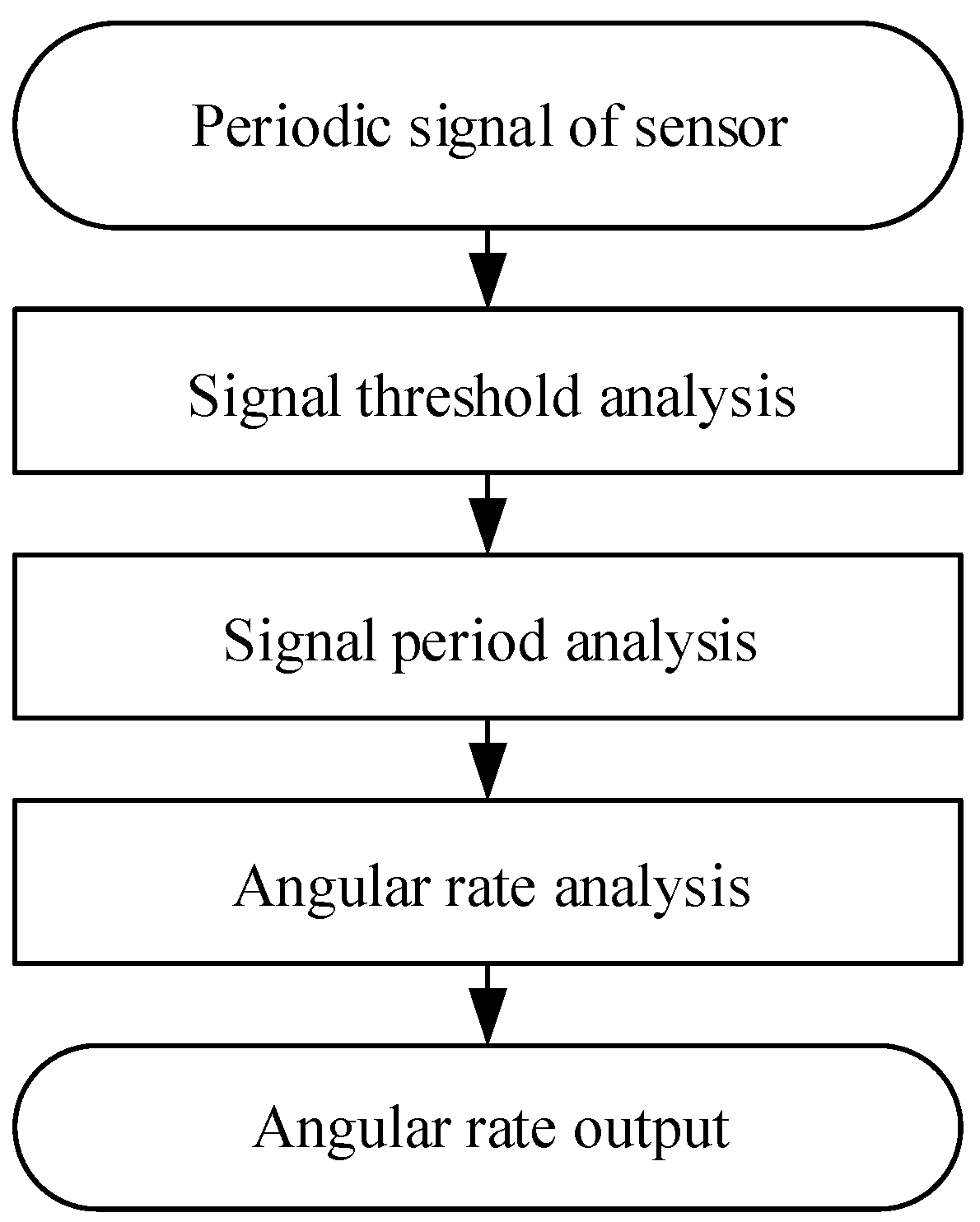
3. Design of the Electronic Solver Module
3.1. Threshold Analysis of the Sensor Signal
3.2. Period Analysis of the Sensor Signal
3.3. Angular Rate Analysis of the Sensor Signal
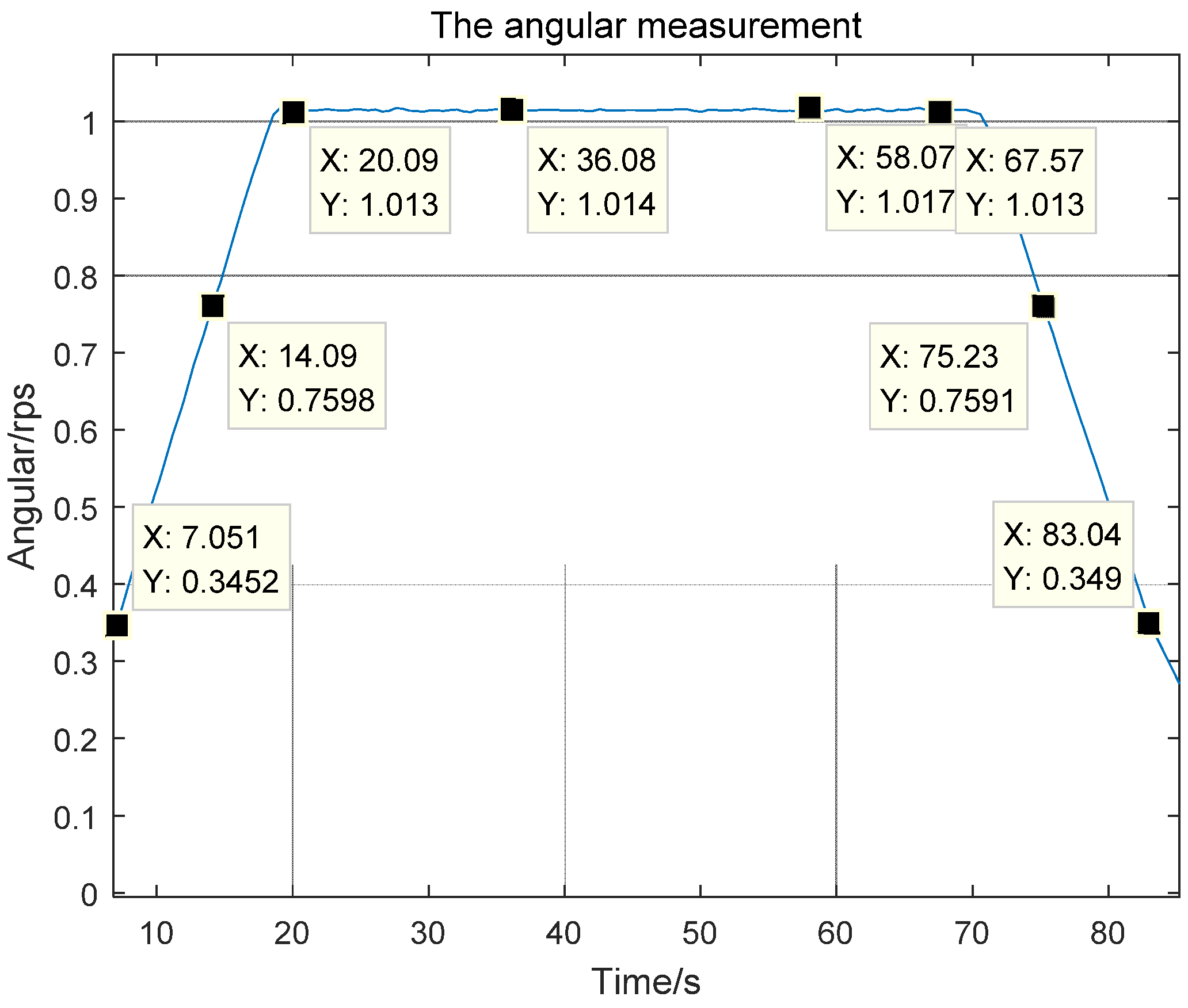
4. Experimental Results and Discussion
4.1. Semi-Physical Simulation Test
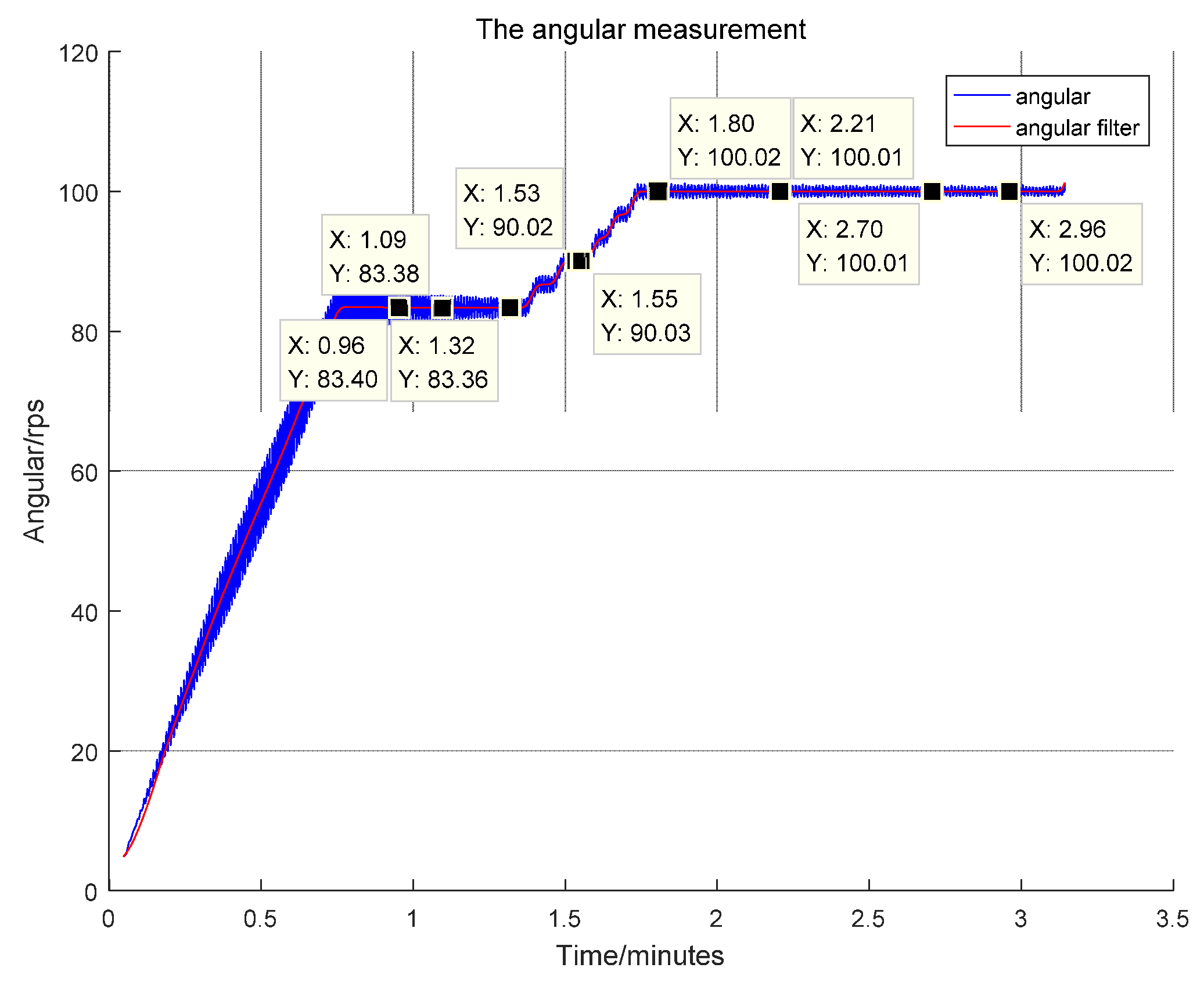
4.2. Physical Test of Hi-Precision Rotary Table
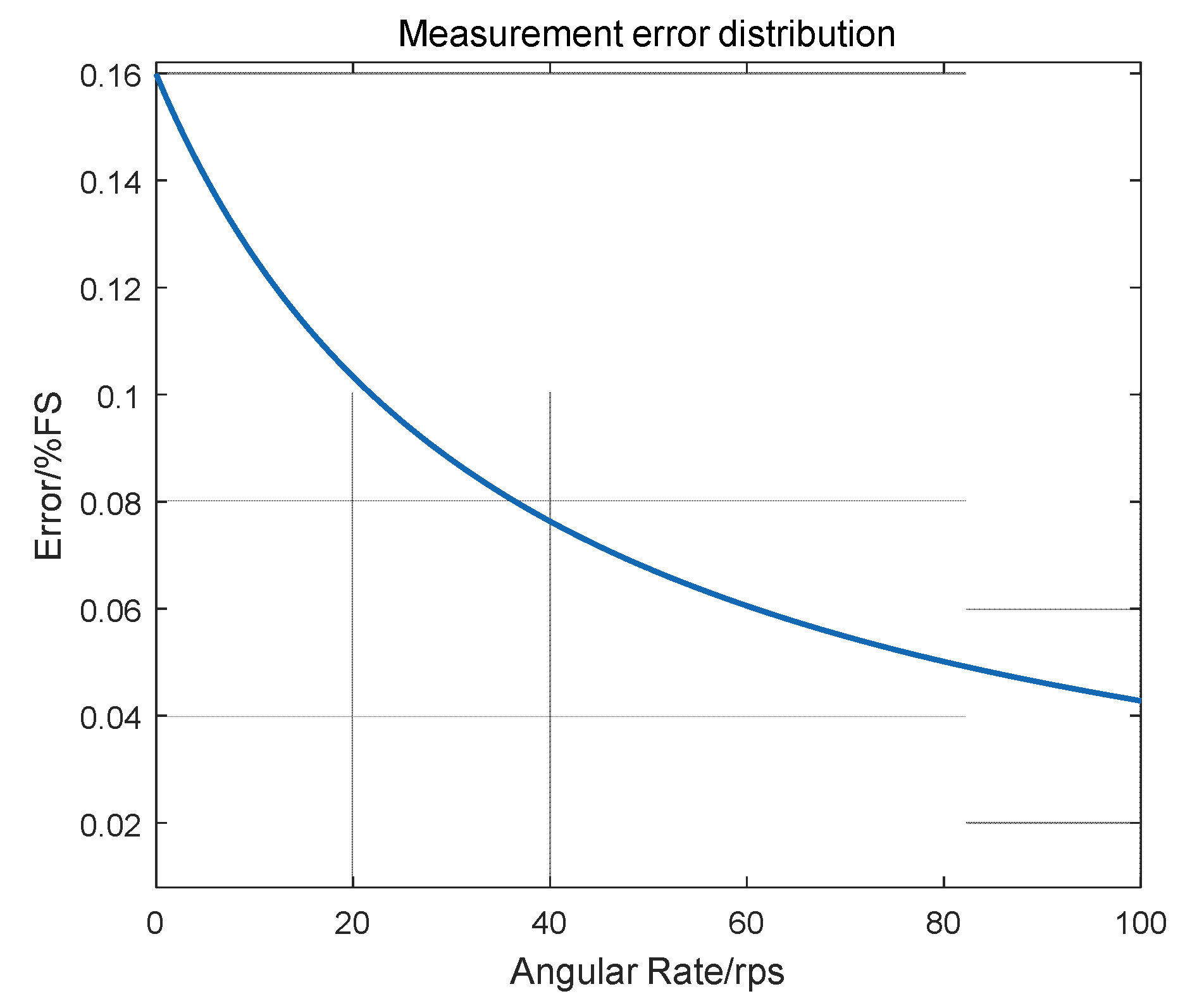
4.3. Sensor Performance Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liu, H.; Pike, W.T. A micromachined angular-acceleration sensor for geophysical applications. Appl. Phys. Lett. 2016, 109, 173506. [Google Scholar] [CrossRef]
- Wang, H.W.; Zhu, J.L.; Zhang, W.; Zhang, C.M.; Zhang, F.X. A Model of Angular Rate Sensor for Circumrotated Carrier. J. Chin. Inertial Technol. 2003, 11, 56–58. [Google Scholar]
- Ettelt, D.; Rey, P.; Jourdan, G.; Walther, A.; Robert, P.; Delamare, J. 3D Magnetic Field Sensor Concept for Use in Inertial Measurement Units (IMUs). J. Microelectromech. Syst. 2014, 23, 324–333. [Google Scholar] [CrossRef]
- Jogschies, L.; Klaas, D.; Kruppe, R.; Rittinger, J.; Taptimthong, P.; Wienecke, A.; Rissing, L.; Wurz, M. Recent Developments of Magnetoresistive Sensors for Industrial Applications. Sensors 2015, 15, 28665–28689. [Google Scholar] [CrossRef] [PubMed]
- Yang, B.; Xu, G.; Jin, J.; Zhou, Y. Comparison on EKF and UKF for geomagnetic attitude estimation of LEO satellites. Chin. Space Sci. Technol. 2012, 32, 23–30. [Google Scholar]
- Zhang, Y.; Chu, H.R. Line of sight angular rate estimation of semi-strapdown seeker electromechanical platform observer. Infrared Laser Eng. 2015, 44, 3794–3800. [Google Scholar]
- Sun, T.T.; Chu, H.R.; Jia, H.G.; Zhang, Y.; Guo, L.H. Line-of-Sight Angular Rate Estimation of Strapdown Optical Image Seeker. Acta Opt. Sin. 2014, 34, 163–169. [Google Scholar]
- Yazdi, N.; Ayazi, F.; Najafi, K. Micromachined inertial sensors. Proc. IEEE 1998, 86, 1640–1659. [Google Scholar] [CrossRef]
- Alper, S.E.; Temiz, Y.; Akin, T. A Compact Angular Rate Sensor System Using a Fully Decoupled Silicon-on-Glass MEMS Gyroscope. J. Microelectromech. Syst. 2009, 17, 1418–1429. [Google Scholar] [CrossRef]
- Pinnoji, P.D.; Nayak, J. Design and analysis of a dual-axis resonator fiber-optic gyroscope employing a single source. Appl. Opt. 2013, 52, 5350–5354. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.J.; Yan, Y.; Hu, Y.H.; Qian, X.C. Rotational Speed Measurement Through Electrostatic Sensing and Correlation Signal Processing. IEEE Trans. Instrum. Meas. 2014, 63, 1190–1199. [Google Scholar] [CrossRef]
- Xiao, Q.; Chen, W.; Li, S.; Cui, F.; Zhang, W. Modeling and simulation of levitation control for a micromachined electrostatically suspended gyroscope. Microsyst. Technol. 2010, 16, 357–366. [Google Scholar] [CrossRef]
- Tozri, A.; Dhahri, E.; Hlil, E.K. New magnetic angular sensor PRAS3 with analog output. Phys. Lett. A 2011, 375, 1528–1533. [Google Scholar] [CrossRef]
- Shang, J.; Deng, Z.; Fu, M.; Wang, S. A High-Spin Rate Measurement Method for Projectiles Using a Magnetoresistive Sensor Based on Time-Frequency Domain Analysis. Sensors 2016, 16, 894. [Google Scholar] [CrossRef] [PubMed]
- Lüken, M.; Misgeld, B.J.; Rüschen, D.; Leonhardt, S. Multi-Sensor Calibration of Low-Cost Magnetic, Angular Rate and Gravity Systems. Sensors 2015, 15, 25919–25936. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, R.; Wei, Y.; Shi, Z.; Yuan, X. Dynamic Calibration and Verification Device of Measurement System for Dynamic Characteristic Coefficients of Sliding Bearing. Sensors 2016, 16, 1202. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.J.; Yan, Y.; Hu, Y.; Hu, Y.H. Rotational Speed Measurement Using Single and Dual Electrostatic Sensors. IEEE Sens. J. 2015, 15, 1784–1793. [Google Scholar] [CrossRef]
- Wang, Z.; Lin, Y.; Wang, X.; Tummel, K.; Chen, L. 3D electrostatic gyrokinetic electron and fully kinetic ion simulation of lower-hybrid drift instability of Harris current sheet. Phys. Plasmas 2016, 23, 072104. [Google Scholar] [CrossRef]
- Zotov, S.A.; Trusov, A.A.; Shkel, A.M. High-range angular rate sensor based on mechanical frequency modulation. J. Microelectromech. Syst. 2012, 21, 398–405. [Google Scholar] [CrossRef]
- Prikhodko, I.P.; Trusov, A.A.; Shkel, A.M. Compensation of drifts in high-Q MEMS gyroscopes using temperature self-sensing. Sens. Actuators A 2013, 201, 517–524. [Google Scholar] [CrossRef]
- Guan, Y.W.; Gao, S.Q.; Liu, H.P.; Jin, L.; Niu, S.H. Acceleration sensitivity of tuning fork gyroscopes: Theoretical model, simulation and experimental verification. Microsyst. Technol. 2015, 21, 1313–1323. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Angular Rate Setting (rps) | Maximum Read-out (rps) | Minimum Read-out (rps) | Maximum Error (‰ FS) | Maximum Error (‰ FS) |
|---|---|---|---|---|
| 1 | 1.018 | 1.013 | 1.8 | 1.3 |
| 83.3 | 83.40 | 83.36 | 1.2 | 0.7 |
| 90 | 90.03 | 90.02 | 0.3 | 0.2 |
| 100 | 100.02 | 100.01 | 0.2 | 0.1 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, K.; Li, Y.; Han, Y. An EM Induction Hi-Speed Rotation Angular Rate Sensor. Sensors 2017, 17, 610. https://doi.org/10.3390/s17030610
Li K, Li Y, Han Y. An EM Induction Hi-Speed Rotation Angular Rate Sensor. Sensors. 2017; 17(3):610. https://doi.org/10.3390/s17030610
Chicago/Turabian StyleLi, Kai, Yuan Li, and Yan Han. 2017. "An EM Induction Hi-Speed Rotation Angular Rate Sensor" Sensors 17, no. 3: 610. https://doi.org/10.3390/s17030610
APA StyleLi, K., Li, Y., & Han, Y. (2017). An EM Induction Hi-Speed Rotation Angular Rate Sensor. Sensors, 17(3), 610. https://doi.org/10.3390/s17030610