
DOA Estimation Based on Real-Valued Cross Correlation Matrix of Coprime Arrays

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
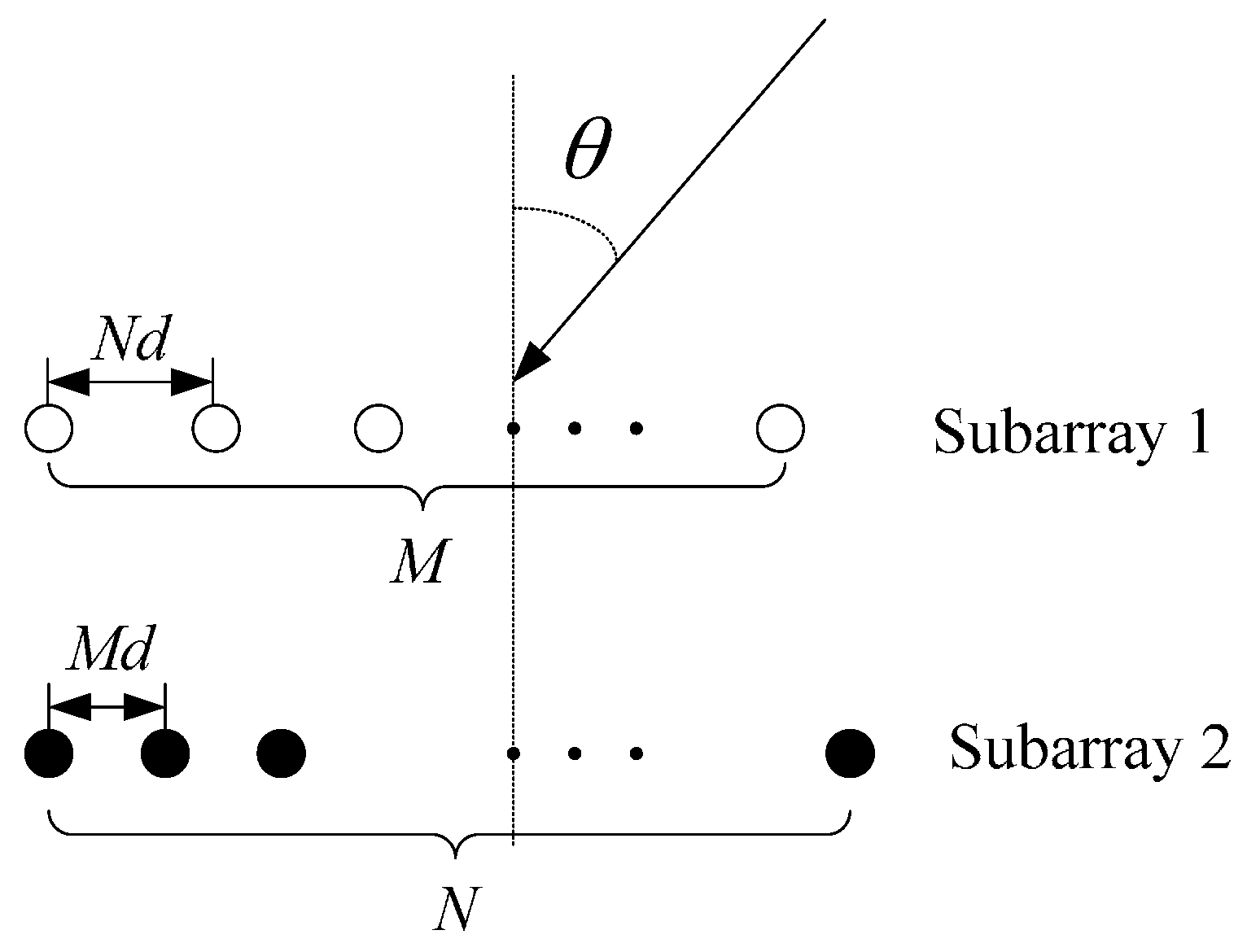
2. Data Model
3. Proposed DOA Estimation Method
3.1. Construction of Real-Valued CCM with Extended Aperture
3.2. Ambiguous DOA Estimation
3.3. Unique DOA Estimation
3.4. Summaries and Remarks
- Construct the real-valued CCM with extended aperture via Equations (22), (7), and (9).
- Perform SVD of the CCM obtained in step 1 to obtain the signal subspaces, and estimate two initial ambiguous DOAs via Equations (15), (18), and (19).
- Determine the unique DOA via Equations (20) and (21).
- It requires CCM construction, real-valued SVD, and eigenvalue-decomposition only once, so it has low complexity.
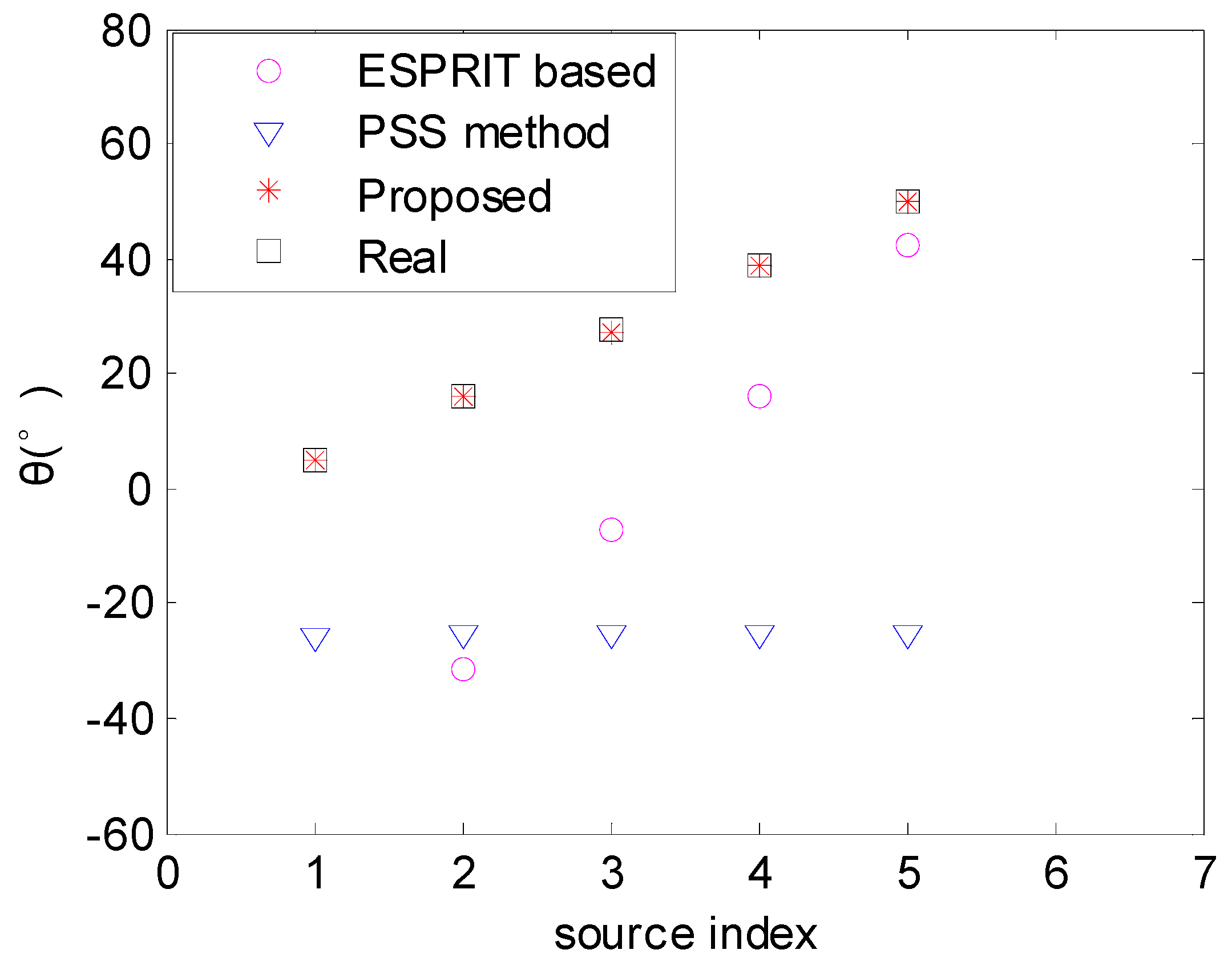
- It extends the aperture of subarray 1, thus, the number of managed source is increased (according to Equation (15), the maximum number depends on the minimum aperture between the two subarrays, i.e., min (2M − 1, N − 1)).
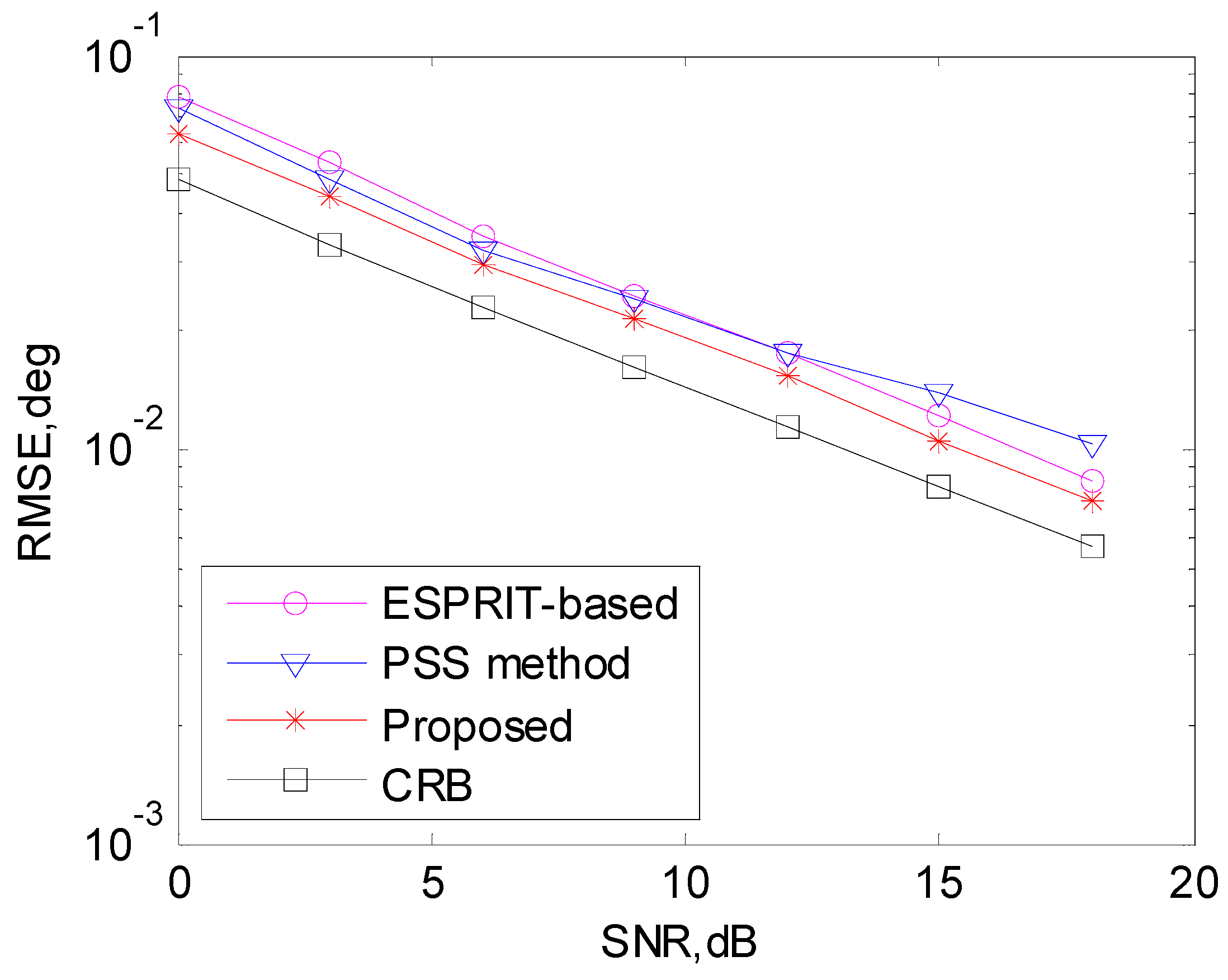
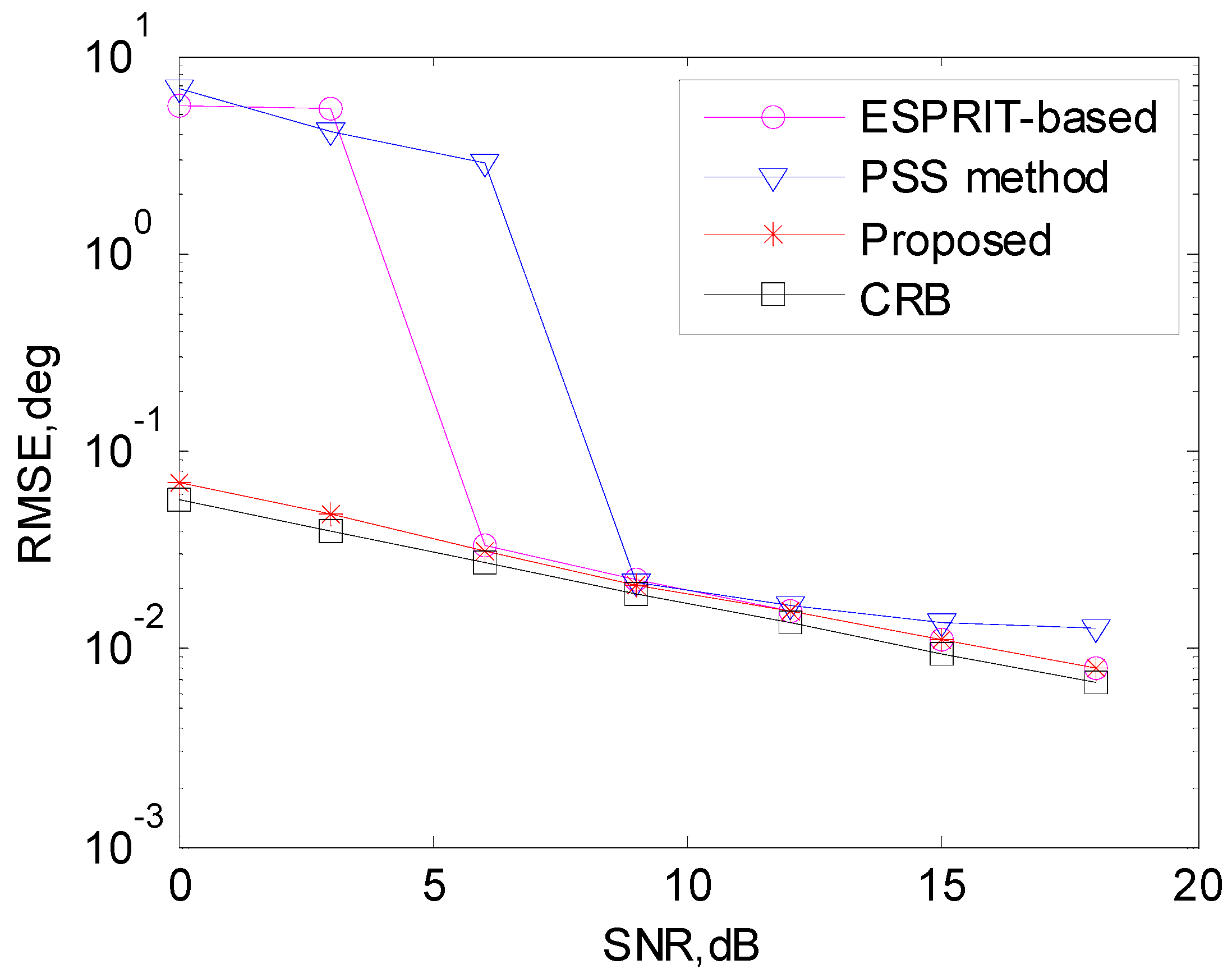
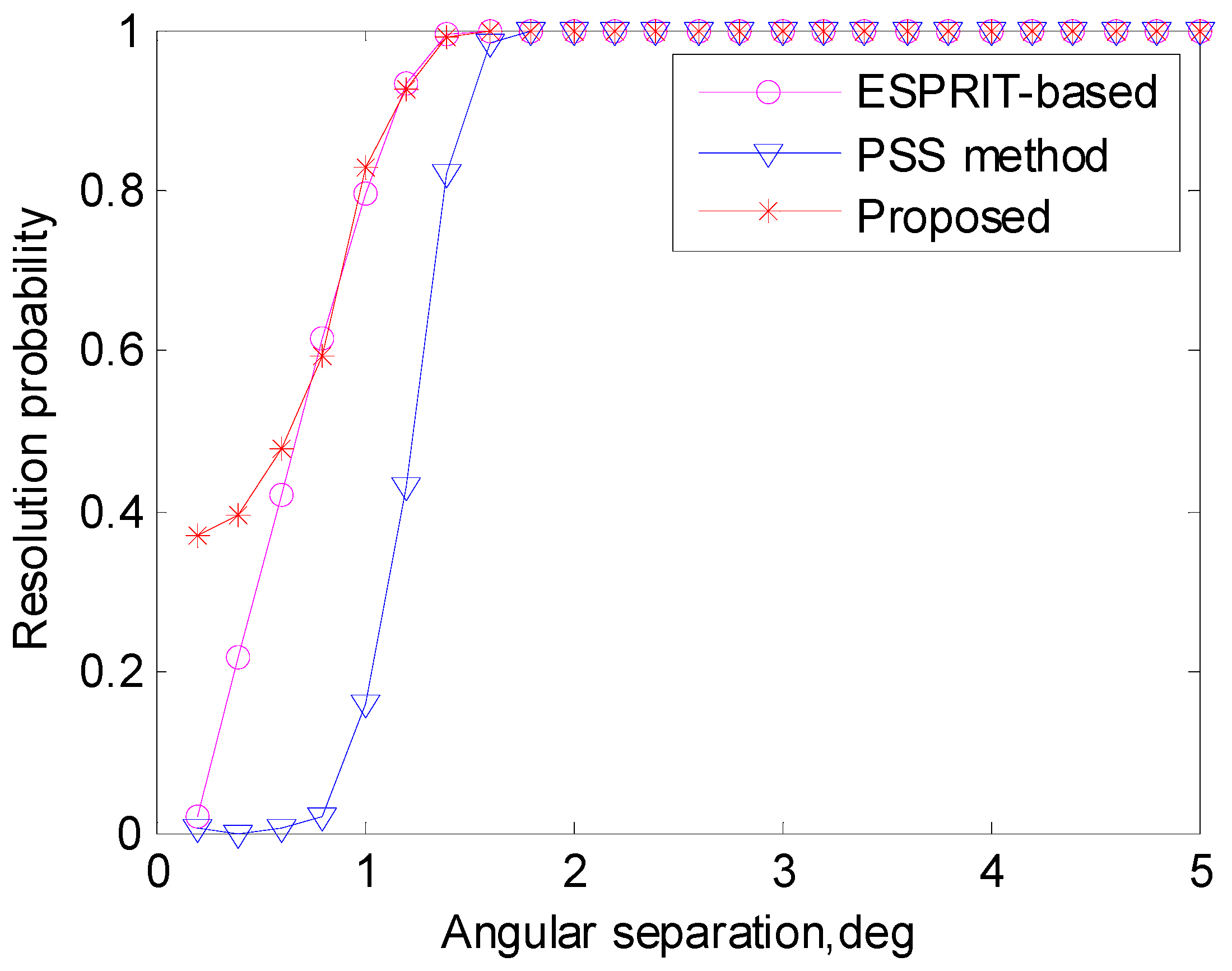
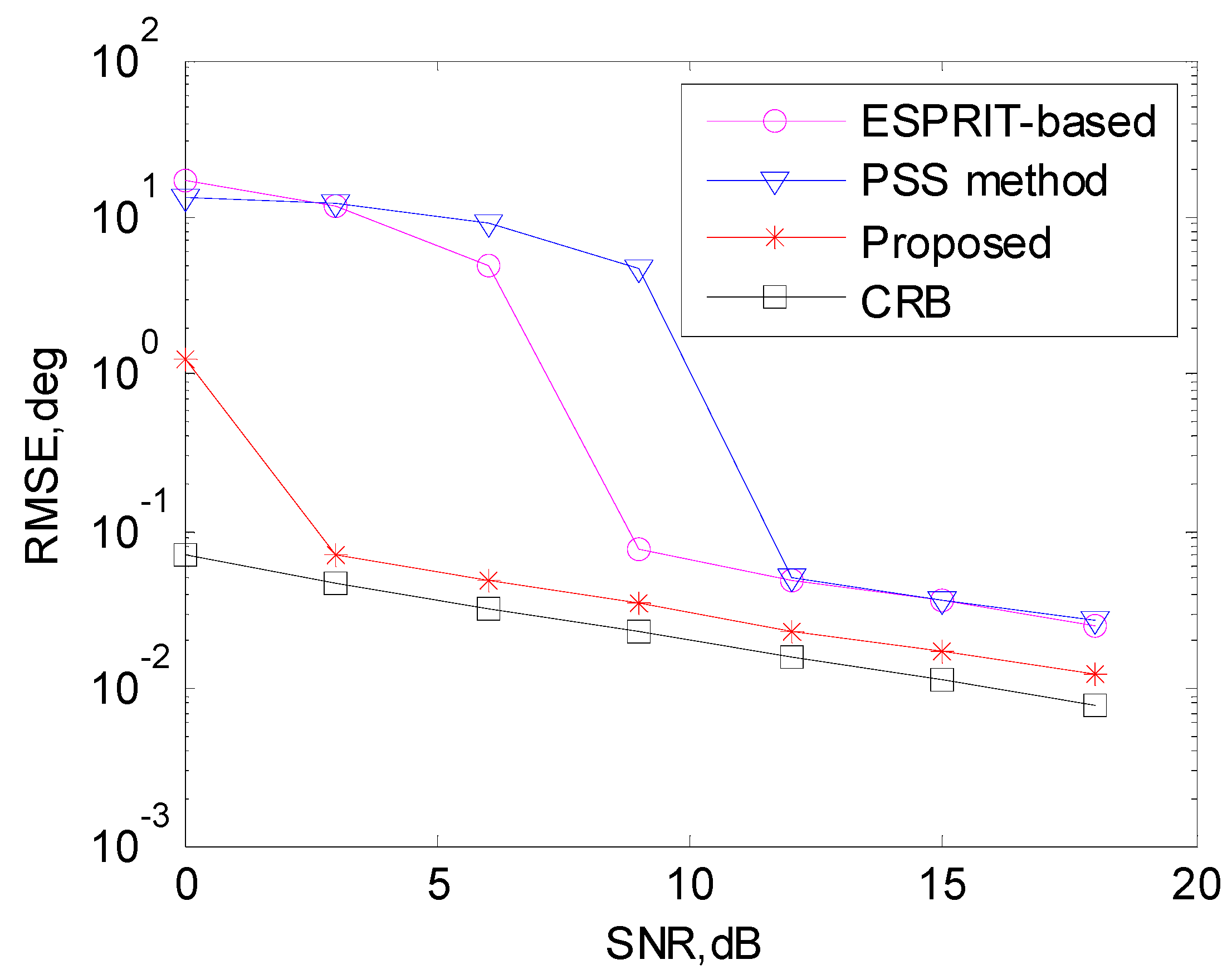
- It achieves better DOA estimation performance than the PSS method and the ESPRIT-based method.
4. Simulation Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gershman, A.B.; Rübsamen, M.; Pesavento, M. One- and two-dimensional direction-of-arrival estimation: An overview of search-free techniques. Signal Process. 2010, 90, 1338–1349. [Google Scholar] [CrossRef]
- Wang, X.; Wei, W.; Li, X.; Liu, J. Real-Valued Covariance Vector Sparsity-Inducing DOA Estimation for Monostatic MIMO Radar. Sensors 2015, 15, 28271–28286. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Zhou, M.; Li, J. A PARALIND Decomposition-Based Coherent Two-Dimensional Direction of Arrival Estimation Algorithm for Acoustic Vector-Sensor Arrays. Sensors 2013, 13, 5302–5316. [Google Scholar] [CrossRef] [PubMed]
- Chiang, C.T.; Chang, A.C. DOA estimation in the asynchronous DS-CDMA system. IEEE Trans. Antennas Propag. 2003, 51, 40–47. [Google Scholar] [CrossRef]
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Gao, F.; Nallanathan, A.; Wang, Y. Improved music under the coexistence of both circular and noncircular sources. IEEE Trans. Signal Process. 2008, 56, 3033–3038. [Google Scholar] [CrossRef]
- Rao, B.D.; Hari, K.V.S. Performance analysis of root-MUSIC. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 1939–1949. [Google Scholar] [CrossRef]
- Pesavento, M.; Gershman, A.B.; Haardt, M. Unitary Root-MUSIC with a Real-Valued Eigendecomposition: A Theoretical and Experimental Performance Study. IEEE Trans. Signal Process. 2000, 48, 1306–1314. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-Estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Haardt, M.; Nossek, J.A. Unitary ESPRIT: How to obtain increased estimation accuracy with a reduced computational burden. IEEE Trans. Signal Process. 1995, 43, 1232–1242. [Google Scholar] [CrossRef]
- Gao, F.; Gershman, A.B. A generalized esprit approach to direction-of-arrival estimation. IEEE Signal Process. Lett. 2005, 12, 254–257. [Google Scholar] [CrossRef]
- Donelli, M.; Viani, F.; Rocca, P.; Massa, A. An Innovative Multiresolution Approach for DOA Estimation Based on a Support Vector Classification. IEEE Trans. Antennas Propag. 2009, 57, 2279–2292. [Google Scholar] [CrossRef]
- Ye, Z.; Dai, J.; Xu, X.; Wu, X. DOA Estimation for Uniform Linear Array with Mutual Coupling. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 280–288. [Google Scholar]
- Wang, W.; Ren, S.; Dong, Y.; Wang, H. An efficient algorithm for direction finding against unknown mutual coupling. Sensors 2014, 14, 20064–20077. [Google Scholar] [CrossRef] [PubMed]
- Vaidyanathan, P.; Pal, P. Sparse sensing with co-prime samplers and arrays. IEEE Trans. Signal Process. 2011, 59, 573–586. [Google Scholar] [CrossRef]
- Weng, Z.; Djuric, P. A search-free DOA estimation algorithm for coprime arrays. Digit. Signal Process. 2014, 24, 27–33. [Google Scholar] [CrossRef]
- Li, J.; Jiang, D.; Zhang, X. Sparse representation based two-dimensional direction of arrival estimation using co-prime array. Multidimens. Syst. Signal Process. 2016, 1–13. [Google Scholar] [CrossRef]
- Zhou, C.; Shi, Z.; Gu, Y.; Shen, X. DECOM: DOA estimation with combined MUSIC for coprime array. In Proceedings of the International Conference on Wireless Communications and Signal Processing (WCSP), Hangzhou, China, 1–5 October 2013.
- Sun, F.; Lan, P.; Gao, B. Partial spectral search-based DOA estimation method for co-prime linear arrays. Electron. Lett. 2015, 51, 2053–2055. [Google Scholar] [CrossRef]
- Sun, F.; Gao, B.; Chen, L.; Lan, P. A Low-Complexity ESPRIT-Based DOA Estimation Method for Co-Prime Linear Arrays. Sensors 2016, 16, 1367. [Google Scholar] [CrossRef] [PubMed]
- Manikas, A. Differential Geometry in Array Processing; Imperial College Press: London, UK, 2004. [Google Scholar]
- Chen, T.; Wu, H.; Zhao, Z. The Real-Valued Sparse Direction of Arrival (DOA) Estimation Based on the Khatri-Rao Product. Sensors 2016, 16, 693. [Google Scholar] [CrossRef] [PubMed]
- Stoica, P.; Nehorai, A. Performance study of conditional and unconditional direction-of-arrival estimation. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1783–1795. [Google Scholar] [CrossRef]







© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Wang, F.; Jiang, D. DOA Estimation Based on Real-Valued Cross Correlation Matrix of Coprime Arrays. Sensors 2017, 17, 638. https://doi.org/10.3390/s17030638
Li J, Wang F, Jiang D. DOA Estimation Based on Real-Valued Cross Correlation Matrix of Coprime Arrays. Sensors. 2017; 17(3):638. https://doi.org/10.3390/s17030638
Chicago/Turabian StyleLi, Jianfeng, Feng Wang, and Defu Jiang. 2017. "DOA Estimation Based on Real-Valued Cross Correlation Matrix of Coprime Arrays" Sensors 17, no. 3: 638. https://doi.org/10.3390/s17030638
APA StyleLi, J., Wang, F., & Jiang, D. (2017). DOA Estimation Based on Real-Valued Cross Correlation Matrix of Coprime Arrays. Sensors, 17(3), 638. https://doi.org/10.3390/s17030638