
Automotive System for Remote Surface Classification

 ,
, 
Abstract
:1. Introduction
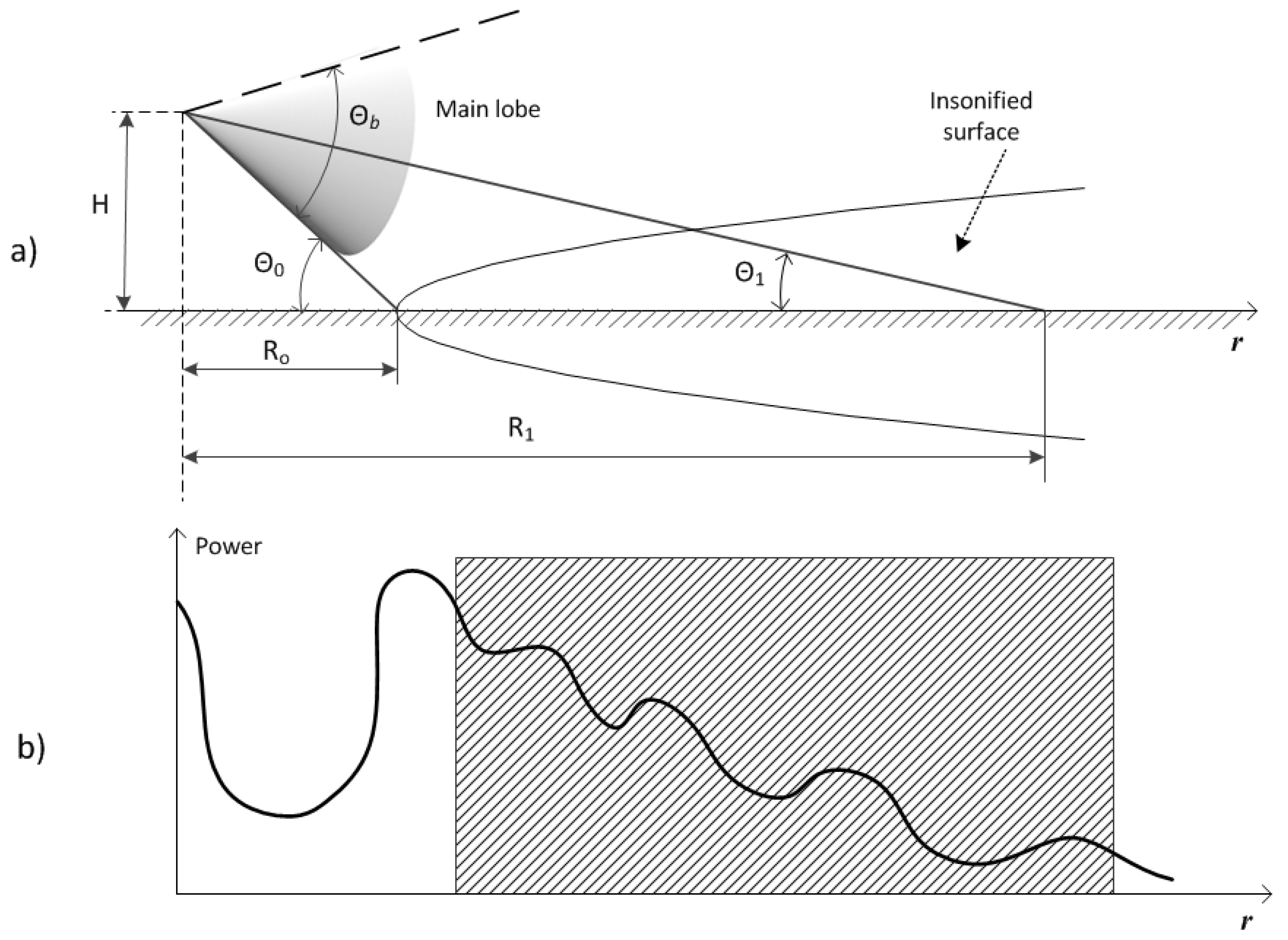
2. Signal Backscattering
2.1. Sonar Signal Backscattering
2.2. Microwave Signal Backscattering
3. Method of Surface Classification
3.1. Surface Classification Procedure
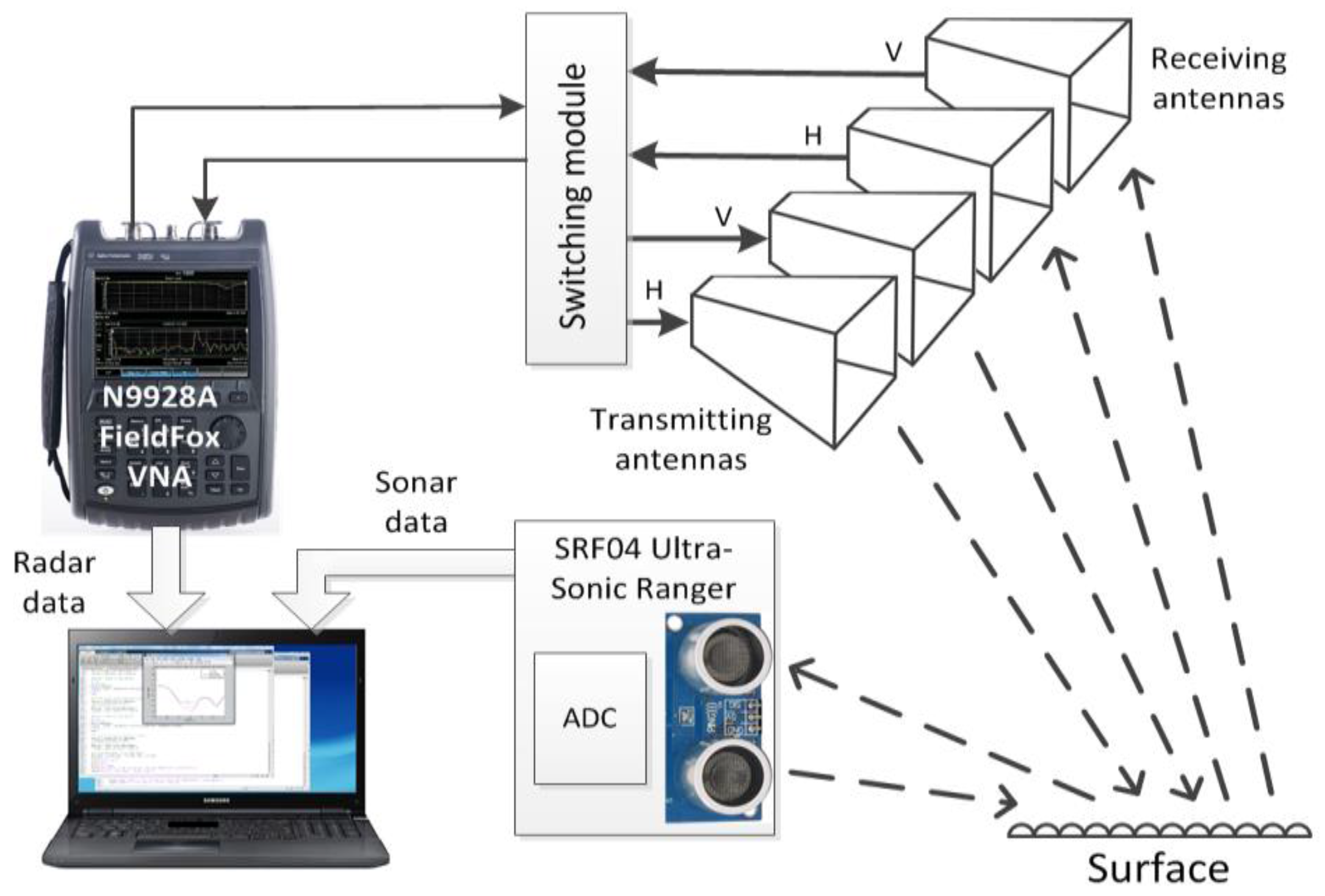
3.2. Experiment Setup
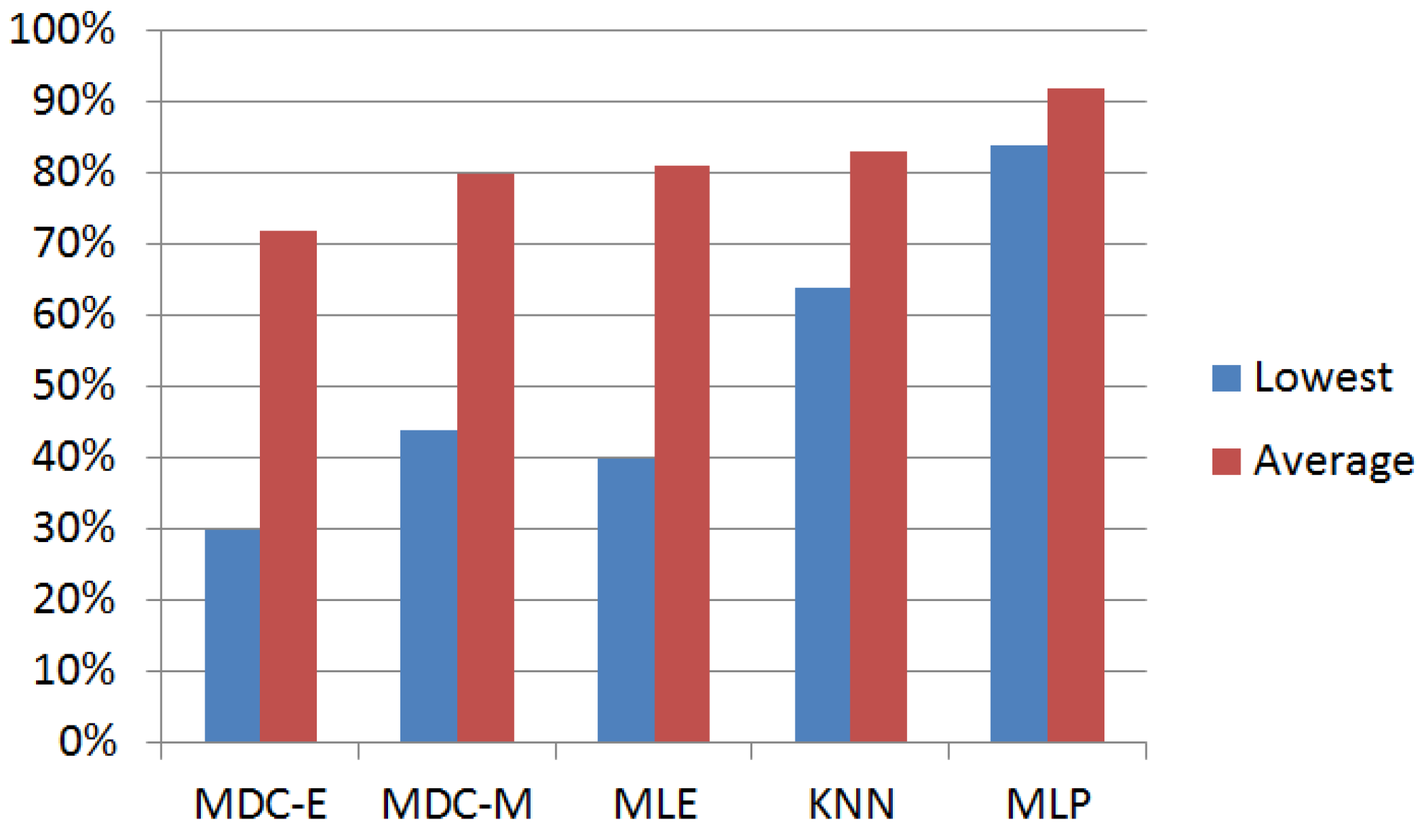
4. Experimental Results
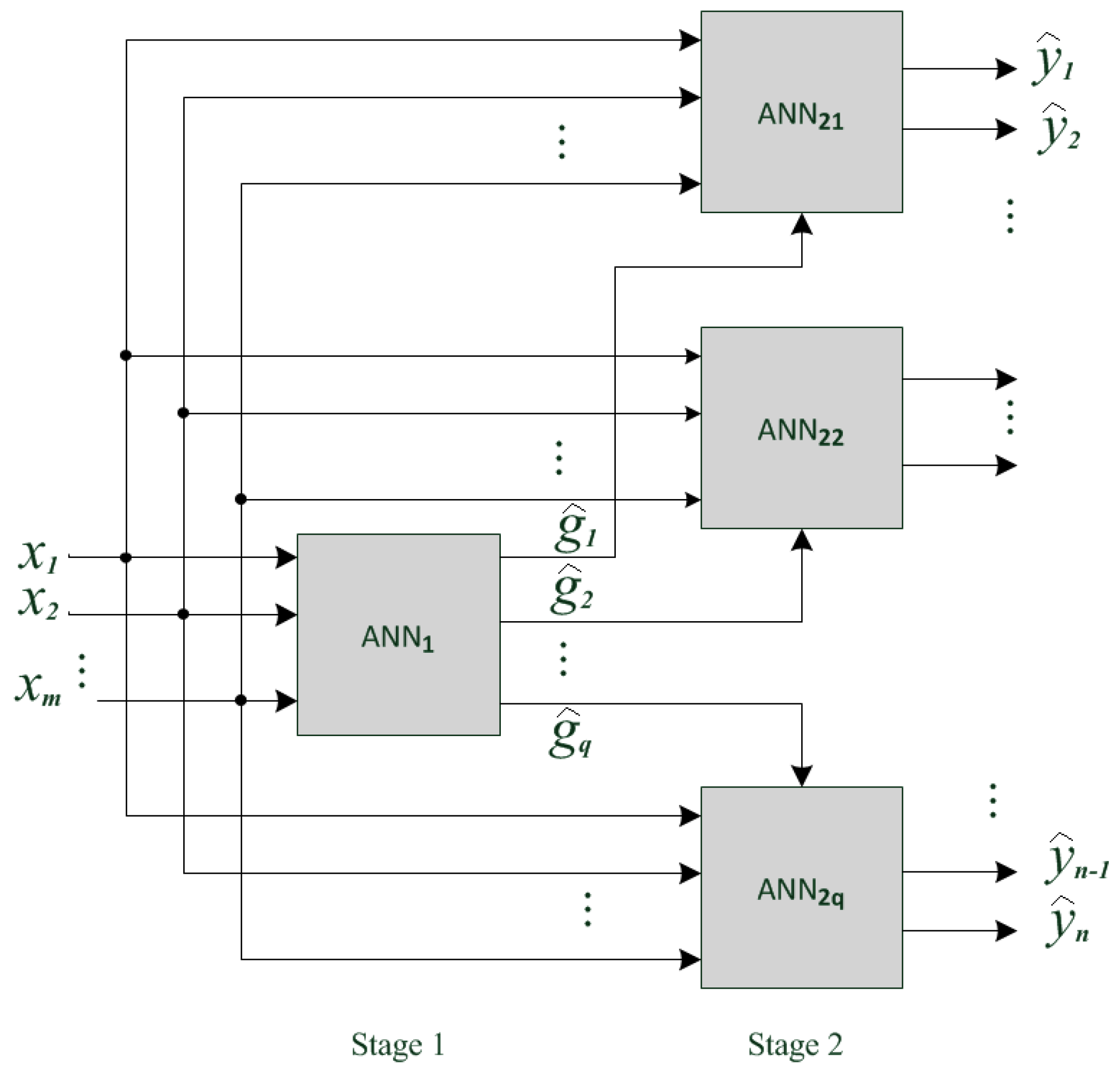
5. ANN Structure Optimization
- Class 1 (C1): ice, snow on ice and compacted snow on asphalt (ID, IS, and AS);
- Class 2 (C2): dry ground, wet ground, and sand (DD, DW, and ND);
- Class 3 (C3): all other surfaces (AD, BD, VD, GD, GW, SD, SW, and SI).
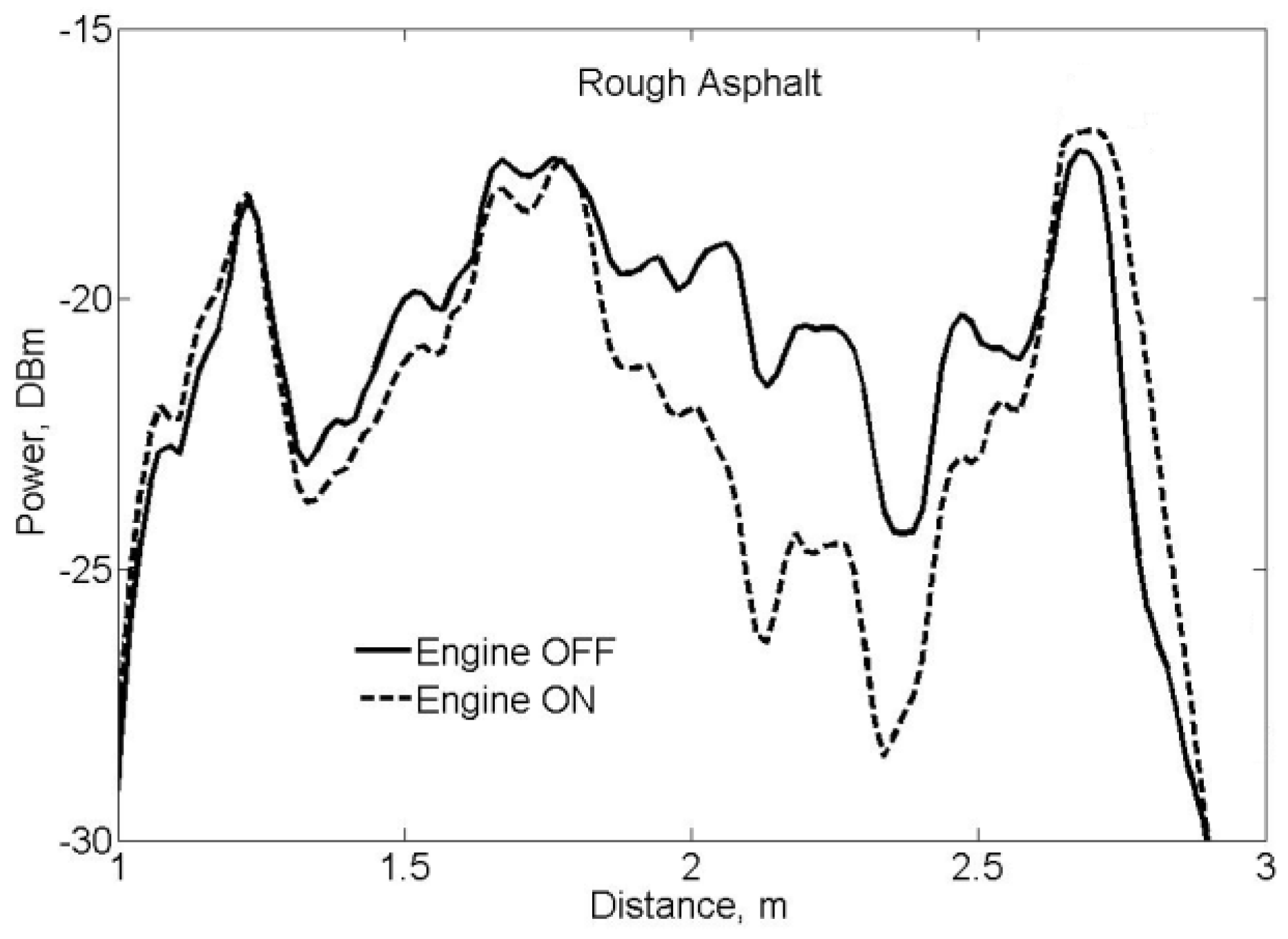
6. Influence of Vehicle Movement on Surface Recognition
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jenkins, A. Remote sensing technology for automotive safety. Microw. J. 2007, 50, 24–65. [Google Scholar]
- Luchetta, A.; Manetti, S.; Francini, F. Forecast: A neural system for diagnosis and control of highway surfaces. IEEE J. Intell. Syst. Their Appl. 1998, 13, 20–26. [Google Scholar] [CrossRef]
- Vlacic, L.; Parentand, M.; Harashima, F. Intelligent Vehicle Technologies, Theory and Applications; Butterworth-Heinemann: Oxford, UK, 2001. [Google Scholar]
- Rasshofer, R.H.; Spies, M.; Spies, H. Influences of weather phenomena on automotive laser radar systems. Adv. Radio Sci. 2011, 9, 49–60. [Google Scholar] [CrossRef]
- Paulo, J.P.; Bento Coelho, J.L. Method for identification of road pavement types using a Bayesian analysis and neural networks. In Proceedings of the 17th International Congress on Sound and Vibration, Cairo, Egypt, 18–22 July 2010; pp. 1–8. [Google Scholar]
- Paulo, J.P.; Bento Coelho, J.L. Statistical classification of road pavements using near field vehicle rolling noise measurements. J. Acoust. Soc. Am. 2010, 128, 1747–1754. [Google Scholar] [CrossRef] [PubMed]
- Alonso, J.; Lopez, J.M.; Pavon, I.; Recuero, M.; Asenio, C.; Arcas, G.; Bravo, A. On-board wet road identification using tyre/road noise and Support Vector Machines. Appl. Acoust. 2014, 76, 407–415. [Google Scholar] [CrossRef]
- Bystrov, A.; Hoare, E.; Tran, T.-Y.; Clarke, N.; Gashinova, M.; Cherniakov, M. Road surface classification using automotive ultrasonic sensor. In Proceedings of the 30th Anniversary Eurosensors Conference, Budapest, Hungary, 4–7 September 2016; Volume 168, pp. 19–22. [Google Scholar]
- McKerrow, P.J.; Kristiansen, B.J. Classifying surface roughness with CTFM ultrasonic sensing. IEEE Sens. J. 2006, 6, 1265–1279. [Google Scholar] [CrossRef]
- Kao, G.; Probert, P. Feature extraction from a broadband sonar sensor for mapping structured environments efficiently. Int. J. Rob. Res. 2000, 19, 895–913. [Google Scholar] [CrossRef]
- Zografos, K.; Smith, P.P. Rough surfaces classification for environmental perception of a mobile robot using CTFM sonar imaging and neural networks. In Proceedings of the 10th International Conference on Advanced Robotics ICAR 2001, Budapest, Hungary, 22–25 August 2001; pp. 585–590. [Google Scholar]
- Smith, P.P.; Zografos, K. Sonar for recognizing the texture of pathways. Robot. Auton. Syst. 2005, 51, 17–28. [Google Scholar] [CrossRef]
- Bozma, O.; Kuc, R. Characterizing the environments using echo energy, duration and range: The ENDURA method. In Proceedings of the 1992 IEEE/RSJ International Conference on Intelligent Robots and Systems, Raleigh, NC, USA, 7–10 July 1992; pp. 813–820. [Google Scholar]
- Bozma, O.; Kuc, R. A physical model-based analysis of heterogeneous environments using sonar—ENDURA method. IEEE Trans. Pattern Anal. Mach. Intell. 1994, 16, 497–506. [Google Scholar] [CrossRef]
- Politis, Z.; Probert Smith, P.J. Classification of textured surfaces for robot navigation using continuous transmission frequency-modulated sonar signatures. Int. J. Rob. Res. 2001, 20, 107–128. [Google Scholar] [CrossRef]
- Pathirana, P.N.; Zaknich, A. Surface identification by acoustic reflection characteristics using time delay spectrometry and artificial neural networks. Int. Conf. Neural Netw. 1997, 1, 31–36. [Google Scholar]
- Ogilvy, J. Theory of Wave Scattering from Random Rough Surfaces; Institute of Physics: Bristol, UK, 1991. [Google Scholar]
- Kinsler, L.E.; Frey, A.R.; Coppens, A.B.; Sanders, J.V. Fundamentals of Acoustic, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2000. [Google Scholar]
- Bass, H.E.; Shields, F.D. Absorption of sound in air: High-frequency measurements. J. Acoust. Soc. Am. 1977, 62, 571–581. [Google Scholar] [CrossRef]
- Viikari, V.V.; Varpula, T.; Kantanen, M. Road-condition recognition using 24-GHz automotive radar. IEEE Trans. Intell. Trans. Sys. 2009, 10, 639–648. [Google Scholar] [CrossRef]
- Bystrov, A.; Abbas, M.; Hoare, E.; Tran, T.-Y.; Clarke, N.; Gashinova, M.; Cherniakov, M. Analysis of Classification Algorithms Applied to Road Surface Recognition. In Proceedings of the IEEE Radar Conference (RadarCon), Arlington, VA, USA, 10–15 May 2015; pp. 0907–0911. [Google Scholar]
- Finkele, R.; Schreck, A.; Wanielik, G. Polarimetric road condition classification and data visualization. In Proceedings of the International ‘Quantitative Remote Sensing for Science and Applications’, Geoscience and Remote Sensing Symposium (IGARSS ‘95), Firenze, Italy, 10–14 July 1995; pp. 1786–1788. [Google Scholar]
- Ulaby, F.T.; Sarabandi, K.; Nashashibi, A. Statistical properties of the Mueller matrix of distributed targets. IEE Proc. F Radar Signal Process. 1992, 139, 136–146. [Google Scholar] [CrossRef]
- Snuttjer, B.R.J.; Narayanan, R.M. Millimeter-wave backscatter measurements in support of surface navigation applications. In Proceedings of the International 'Remote Sensing for a Sustainable Future', Geoscience and Remote Sensing Symposium (IGARSS ‘96), Lincoln, NE, USA, 27–31 May 1996; pp. 506–508. [Google Scholar]
- Giubbolini, L.; Wanielik, G. A microwave coherent polarimeter with velocity gating for road surface monitoring. In Proceedings of the 13th International Conference on Microwaves, Radar and Wireless Communications 2000 (MIKON-2000), Wroclaw, Poland, 22–24 May 2000; pp. 355–358. [Google Scholar]
- Sarabandi, K.; Li, E.S.; Nashashibi, A. Modeling and measurements of scattering from road surfaces at millimeter-wave frequencies. IEEE Trans. Antennas Propag. 1977, 45, 1679–1688. [Google Scholar] [CrossRef]
- Hakli, J.; Saily, J.; Koivisto, P.; Huhtinen, I.; Dufva, T.; Rautiainen, A.; Toivanen, H.; Nummila, K. Road surface condition detection using 24 GHz automotive radar technology. In Proceedings of the 14th International Radar Symposium (IRS 2013), Dresden, Germany, 19–21 June 2013; pp. 702–707. [Google Scholar]
- Tapkan, R.I.; Yoakim-Stover, S.; Kubichek, F. Active microwave remote sensing of road surface conditions. In Proceedings of the Snow Removal and Ice Control Technology, Roanoke, VA, USA, 11–16 August 1997; pp. 73–80. [Google Scholar]
- Song, I.Y.; Yoon, J.H.; Bae, S.H.; Jeon, M.; Shin, V. Classification of road surface status using a 94 GHz dual-channel polarimetric radiometer. Int. J. Remote Sens. 2012, 33, 5746–5767. [Google Scholar] [CrossRef]
- Song, I.Y.; Shin, V. Robust urban road surface monitoring system using Bayesian classification and outlier rejection algorithm. In Proceedings of the 12th International Conference on Control Automation and Systems (ICCAS 2012), Jeju Island, Korea, 17–21 October 2012; pp. 1118–1122. [Google Scholar]
- Schneider, R.; Didascalou, D.; Wiesbeck, W. Impact of road surfaces on millimeter-wave propagation. IEEE Trans. Veh. Technol. 2000, 49, 1314–1320. [Google Scholar] [CrossRef]
- Li, E.S.; Sarabandi, K. Low grazing angle incidence millimeter-wave scattering models and measurements for various road surfaces. IEEE Trans. Antennas Propag. 1999, 47, 851–861. [Google Scholar] [CrossRef]
- Alpaydin, E. Introduction to Machine Learning; MIT Press: Cambridge, MA, USA, 2010. [Google Scholar]
- Bishop, C.M. Neural networks and their applications. Rev. Sci. Instrum. 1994, 65, 1803–1832. [Google Scholar] [CrossRef]
- Jolliffe, I.T. Principal Component Analysis; Springer: New York, NY, USA, 1986. [Google Scholar]
- Mohammad-Saleh, J.; Hoyle, B.S. Improved neural network performance using principal component analysis on Matlab. Int. J. Comput. Internet Manag. 2008, 16, 1–8. [Google Scholar]
- Demuth, H.; Beale, M. MATLAB Neural Network Toolbox User’s Guide, version 3.0; The Math Works Inc.: Natick, MA, USA, 1998. [Google Scholar]
- The Wireless Telegraphy (Automotive Short Range Radar) (Exemption) Regulations 2013. Available online: http://www.legislation.gov.uk/uksi/2013/1437/pdfs/uksi_20131437_en.pdf (accessed on 24 January 2017).
- Revision of part 15 of the Commission’s Rules Regarding Ultra-Wideband Transmission Systems, Federal Communications Commission. Available online: https://www.fcc.gov/document/revision-part-15-commissions-rules-regarding-ultra-wideband (accessed on 24 January 2017).
- Haykin, S. Neural Networks: A Comprehensive Foundation; Macmillan College: London, UK, 1999. [Google Scholar]
- Sharkey, A. Multi-net systems. In Combining Artificial Neural Nets: Ensemble and Modular Multi-Net Systems; Sharkey, A.J.C., Ed.; Springer: Berlin, Germany, 1999; pp. 1–30. [Google Scholar]
- Yang, S.; Browne, A. Neural network ensembles: combining multiple models for enhanced performance using a multistage approach. Expert Sys. 2004, 21, 279–288. [Google Scholar] [CrossRef]
- Tyagi, V.; Mishra, A. A survey on ensemble combination schemes of neural network. Int. J. Comput. Appl. 2014, 95, 18–21. [Google Scholar] [CrossRef]
- Richards, J.A.; Jia, X. Remote Sensing Digital Image Analysis, 5th ed.; Springer: New York, NY, USA, 2005. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal Features | Swathe 1 (1.5 m–2.5 m) | Full Range (1.5 m–4.0 m) | Swathe 2 (3.0 m–4.0 m) |
|---|---|---|---|
| Mean power | Sonar, Radar VV | Sonar, Radar VV, VH, HV, HH | Sonar, Radar VV |
| Standard deviaton | - | Sonar, Radar VV | - |
| Power above the threshold | - | Sonar | - |
| Duration above the threshold | - | Sonar | - |
| Actual | Predicted Class | |||
|---|---|---|---|---|
| Class | … | |||
| … | ||||
| … | ||||
| … | … | … | … | … |
| … | ||||
| Surface | AD | BD | VD | GD | GW | DD | DW | ND | SD | SW | SI | ID | IS | AS |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AD | 96 | 0 | 2 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| BD | 0 | 100 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| VD | 1 | 0 | 95 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| GD | 4 | 0 | 2 | 94 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| GW | 0 | 0 | 3 | 0 | 95 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 |
| DD | 1 | 0 | 0 | 0 | 0 | 85 | 3 | 5 | 0 | 0 | 0 | 0 | 3 | 3 |
| DW | 0 | 0 | 0 | 0 | 0 | 2 | 90 | 4 | 0 | 0 | 2 | 0 | 1 | 1 |
| ND | 0 | 0 | 0 | 0 | 0 | 0 | 5 | 94 | 0 | 0 | 0 | 0 | 0 | 1 |
| SD | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 98 | 0 | 0 | 0 | 0 | 0 |
| SW | 1 | 0 | 3 | 7 | 3 | 0 | 0 | 0 | 0 | 86 | 0 | 0 | 0 | 0 |
| SI | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 97 | 0 | 0 | 1 |
| ID | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 90 | 3 | 6 |
| IS | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 2 | 90 | 5 |
| AS | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 2 | 6 | 6 | 84 |
| ANN1 | ANN21 | ANN22 | |||||||||||
| Class | C1 | C2 | C3 | Surface | ID | IS | AS | Surface | DD | DW | ND | ||
| C1 | 97.4 | 2.3 | 0.3 | ID | 91 | 6 | 3 | DD | 97 | 3 | 0 | ||
| C2 | 0.0 | 93.0 | 7.0 | IS | 0 | 93 | 7 | DW | 2 | 97 | 1 | ||
| C3 | 0.2 | 0.3 | 99.5 | AS | 3 | 6 | 91 | ND | 0 | 0 | 100 | ||
| ANN23 | |||||||||||||
| Surface | AD | BD | VD | GD | GW | SD | SW | SI | |||||
| AD | 99 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | |||||
| BD | 0 | 98 | 0 | 0 | 0 | 2 | 0 | 0 | |||||
| VD | 0 | 0 | 96 | 2 | 0 | 0 | 2 | 0 | |||||
| GD | 4 | 0 | 2 | 94 | 0 | 0 | 0 | 0 | |||||
| GW | 0 | 0 | 2 | 0 | 98 | 0 | 0 | 0 | |||||
| SD | 0 | 1 | 0 | 0 | 0 | 99 | 0 | 0 | |||||
| SW | 1 | 0 | 1 | 1 | 4 | 0 | 93 | 0 | |||||
| SI | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 99 | |||||
| Surface | Surface | Surface | |||
|---|---|---|---|---|---|
| AD | 99 | DD | 97 | SI | 99 |
| BD | 98 | DW | 97 | ID | 91 |
| VD | 96 | ND | 100 | IS | 91 |
| GD | 94 | SD | 99 | AS | 93 |
| GW | 98 | SW | 93 | Average | 95 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bystrov, A.; Hoare, E.; Tran, T.-Y.; Clarke, N.; Gashinova, M.; Cherniakov, M. Automotive System for Remote Surface Classification. Sensors 2017, 17, 745. https://doi.org/10.3390/s17040745
Bystrov A, Hoare E, Tran T-Y, Clarke N, Gashinova M, Cherniakov M. Automotive System for Remote Surface Classification. Sensors. 2017; 17(4):745. https://doi.org/10.3390/s17040745
Chicago/Turabian StyleBystrov, Aleksandr, Edward Hoare, Thuy-Yung Tran, Nigel Clarke, Marina Gashinova, and Mikhail Cherniakov. 2017. "Automotive System for Remote Surface Classification" Sensors 17, no. 4: 745. https://doi.org/10.3390/s17040745
APA StyleBystrov, A., Hoare, E., Tran, T. -Y., Clarke, N., Gashinova, M., & Cherniakov, M. (2017). Automotive System for Remote Surface Classification. Sensors, 17(4), 745. https://doi.org/10.3390/s17040745