Piezoelectric Actuated Phase Shifter Based on External Laser Interferometer: Design, Control and Experimental Validation

Abstract
:1. Introduction
2. Structure Design
2.1. Piezoelectric Actuator
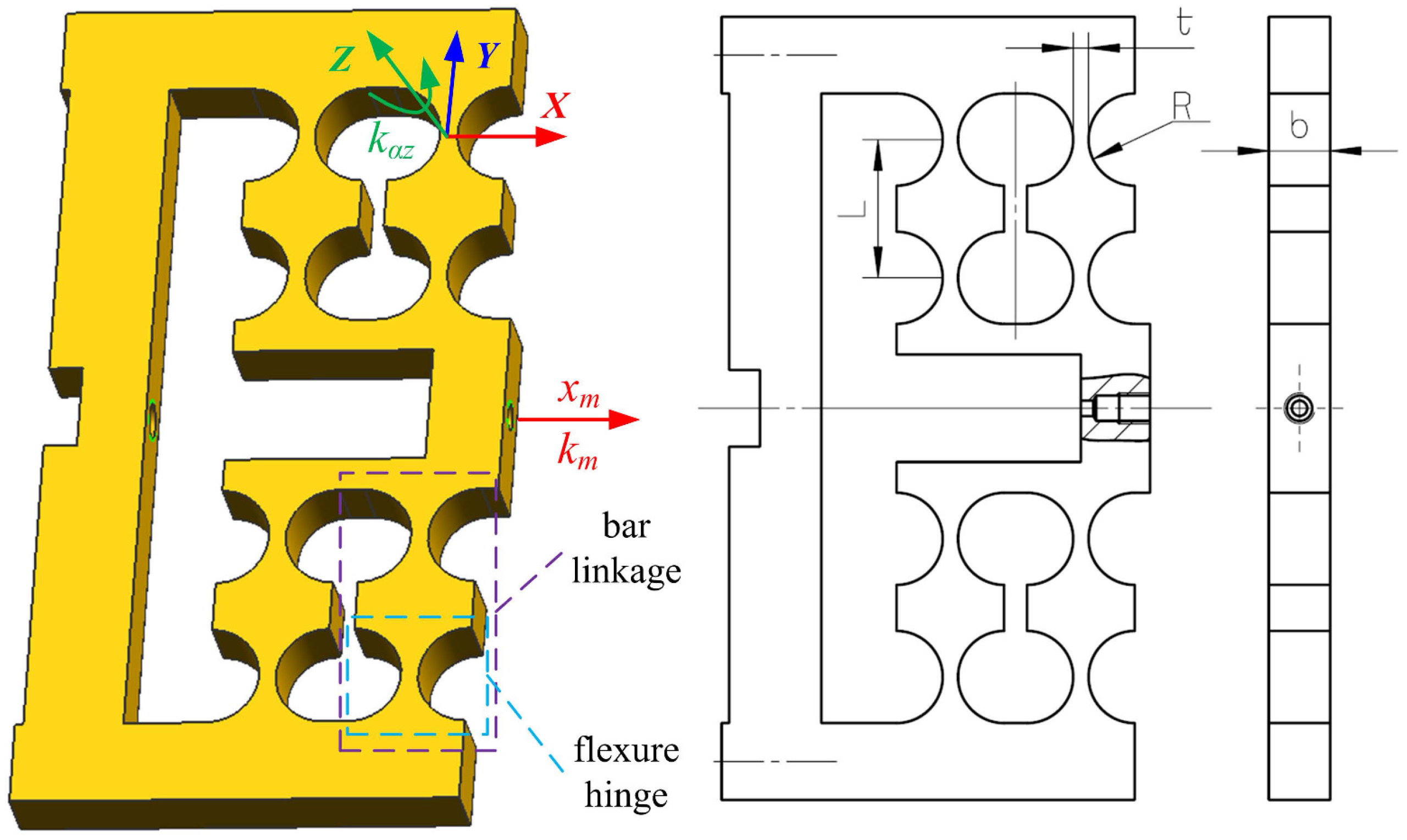
2.2. Flexure Hinge-Based Mechanism
2.3. Phase Shifter
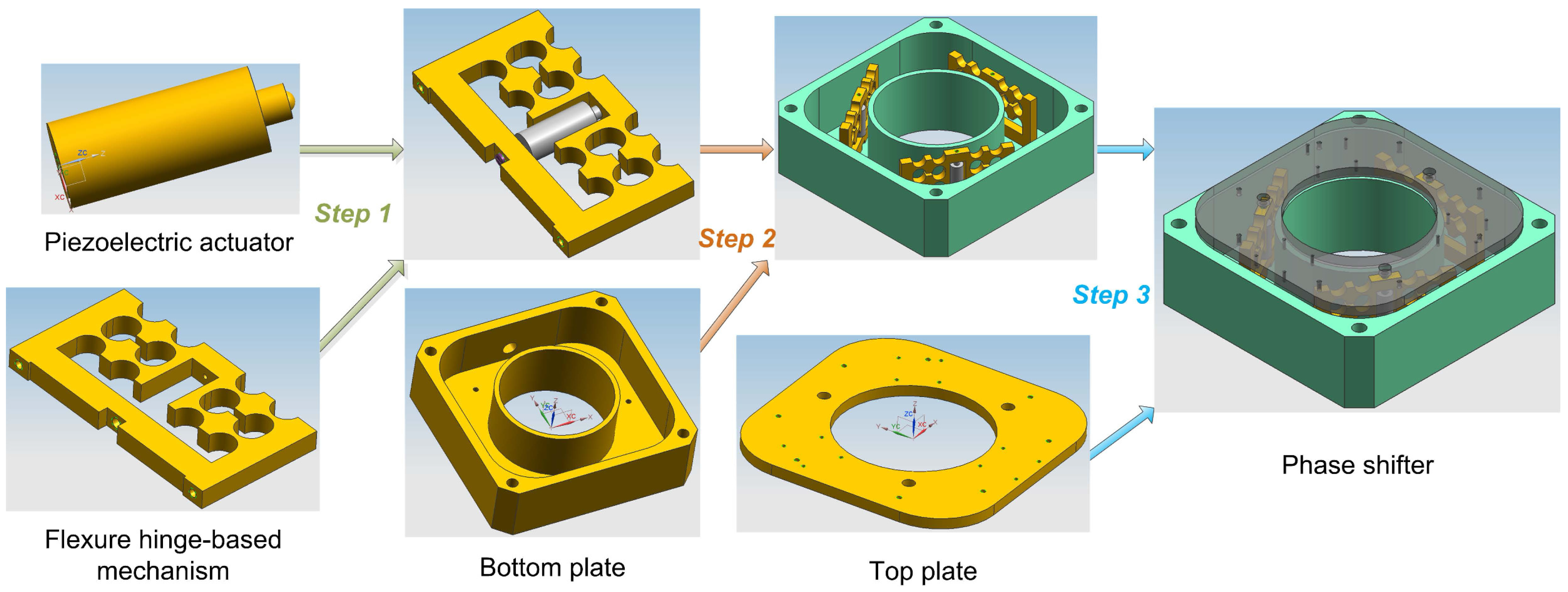
- Step 1: Assemble the actuator with the mechanism. Firstly, make the ball tip of the actuator closely contact with the loading end of the mechanism; then, push tightly the bottom of the actuator with a slotted set screw through the thread hole of the fixing end of the mechanism.
- Step 2: Connect the assembly finished in Step 1 together with the bottom plate via six screws with identical torque.
- Step 3: Connect the assembly finished in Step 2 together with the top plate by three screws with identical torque.
3. Control Architecture
- First, and of PID controller are chosen through the trial and error method [26]. Gradually increase the values of and , and then check the dynamic characteristics of the step response of the piezoelectric actuator until little overshoot, short settling time and small stable error are obtained. To guarantee the stability of PID controller, step response to the maximum nominal displacement is stably adjusted with little or even no overshoot. In this way, sufficient stability margin can be achieved.
- Second, the motion transmission matrix from phase shifter to piezoelectric actuators is determined with normal work of PID controller. Move the three piezoelectric actuators individually for a certain displacement in closed loop control, measure and record the corresponding displacements of the three points , and of the phase shifter, respectively, and then compute based on the displacement data of the actuators and phase shifter in the least square method. This procedure could be repeated many times to attain average values of .
- Third, with normal work of both PID controller and the motion transmission matrix, the coefficients and can be obtained by fitting the relationship between the desired displacement and the real one of the phase shifter using the cubic polynomial. During the travel range, input 10 or more desired displacements with equal intervals to the working controller, measure and record the corresponding output displacements of the phase shifter, and then linearize the input and output displacement data with a cubic polynomial.
4. Experiments
- (1) Phase shifter is assembled using the piezoelectric actuators and flexure mechanisms. The piezoelectric actuators are excited by power amplifiers with 15× gain and monitored by built-in SGS displacement sensors. The amplifier can amplify the input 0–10 V analog voltage by 15 times and output 0–150 V analog voltage with an average power of 7 W. The SGS signal conditioner converts the signal generated from SGS into 0–10 V analog voltage with a 0.1% nonlinearity. The flexure mechanisms are manufactured by wire cutting electrical discharge machine.
- (2) The Renishaw XL-80 system manufactured in Gloucestershire, UK is employed as the laser interferometer. Its resolution can reach 1 nm and system accuracy can be up to 0.5 ppm. The measured data can be displayed, updated and logged by XL software in host PC. The linear measurement optical kit is fixed on the top surface of the phase shifter to measure the linear vertical displacement.
- (3) xPC Target can run Simulink models on a target PC for rapid control prototyping with a library of I/O device drivers and a real-time kernel. The hardware consists of a host PC, a target PC, I/O boards in the target PC, and a network connection between the host and target computers. The software is made up of MATLAB, Simulink, xPC explorer, a C compiler and xPC real-time kernel. It can convert the Simulink model created in the host PC into the target application running on the target PC in real time. In the experiments, the I/O data acquisition board is PCI-6229 device from National Instruments (NI) Corporation in Austin, TX, USA. The NI PCI-6229 board has 16 differential analog input channels and four analog output channels. Its ADC and DAC resolutions are both 16 bits. The connection between the host PC and target PC is realized via a crossover Ethernet cable.
- When a command input comes, xPC Target runs the semi-closed loop control application based on SGS measurement and outputs analog voltages to the amplifiers.
- The SGS measurement is generated from the SGS signal conditioner and then connected to the analog input channels of NI PCI-6229 board through the terminal box.
- The analog voltage output of xPC Target is accomplished by means of the analog output channels of NI PCI-6229 board.
- The amplifiers drive the piezoelectric actuators based on their input analog voltages. Then, the piezoelectric actuators elongate and result in the corresponding displacements of the flexure mechanisms.
- Meanwhile, the generated displacement of the phase shifter is measured by the laser interferometer and then transferred to XL software in the host PC for data displaying and logging.
4.1. Travel Range and Step Response
4.2. Linearity
4.3. Repeatability
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| SGS | Strain gauge sensor |
| FEA | Finite element analysis |
| CMM | Coordinate measuring machine |
| PID | Proportional, integral and derivative |
| NI | National instruments |
| ADC | Analog-to-digital converter |
| DAC | Digital-to-analog converter |
References
- Cheng, Y.Y.; Wyant, J.C. Phase shifter calibration in phase-shifting interferometry. App. Opt. 1985, 24, 3049–3052. [Google Scholar] [CrossRef]
- Zhong, X. Phase-step calibration technique based on a two-run-times-two-frame phase-shift method. Appl. Opt. 2006, 45, 8863–8869. [Google Scholar] [CrossRef] [PubMed]
- Bai, F.; Rao, C. Phase-shifts n/2 calibration method for phase-stepping interferometry. Opt. Express 2009, 17, 16861–16868. [Google Scholar] [CrossRef] [PubMed]
- Braga, R.A.; Gonzalez-Pena, R.J.; Marcon, M.; Magalhaes, R.R.; Paiva-Almeida, T.; Santos, I.V.; Martins, M. Phase-shifting of correlation fringes created by image processing as an alternative to improve digital shearography. Opt. Commun. 2016, 380, 114–123. [Google Scholar] [CrossRef]
- Leach, R. (Ed.) Optical Measurement of Surface Topography (Chapter 8: Phase Shifting Interferometry); Springer: Berlin, Germany, 2011. [Google Scholar]
- Chen, T.; Wang, Y.; Liu, H.; Yang, Z.; Wang, P.; Sun, L. Topologically optimized nano-positioning stage integrating with a capacitive comb sensor. Sensors 2017, 17, 257. [Google Scholar] [CrossRef] [PubMed]
- Li, P.; Li, P.; Sui, Y. Adaptive fuzzy hysteresis internal model tracking control of piezoelectric actuators with nanoscale application. IEEE Trans. Fuzzy Syst. 2016, 24, 1246–1254. [Google Scholar] [CrossRef]
- Li, P.; Yan, F.; Ge, C.; Wang, X.; Xu, L.; Guo, J.; Li, P. A simple fuzzy system for modelling of both rate-independent and rate-dependent hysteresis in piezoelectric actuators. Mech. Syst. Signal Process. 2013, 36, 182–192. [Google Scholar] [CrossRef]
- Gu, G.Y.; Zhu, L.M.; Su, C.Y.; Ding, H. Motion control of piezoelectric positioning stages: modeling, controller design, and experimental evaluation. IEEE/ASME Trans. Mech. 2013, 18, 1459–1471. [Google Scholar] [CrossRef]
- Chiang, M.H. Development of X-Y servo pneumatic-piezoelectric hybrid actuators for position control with high response, large stroke and nanometer accuracy. Sensors 2010, 10, 2675–2693. [Google Scholar] [CrossRef] [PubMed]
- El-Sayed, A.M.; Abo-Ismail, A.; El-Melegy, M.T.; Hamzaid, N.A.; Osman, N.A.A. Development of a micro-gripper using piezoelectric bimorphs. Sensors 2013, 13, 5826–5840. [Google Scholar] [CrossRef] [PubMed]
- Du, Z.; Mei, X.S.; Xu, M.X. Modelling and analysis of a new piezoelectric dynamic balance regulator. Sensors 2012, 12, 14671–14691. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Yu, P.; Wang, F.; Chan, H.Y.; Zhou, L.; Dong, Z.; Liu, L.; Li, W.J. Improving atomic force microscopy imaging by a direct inverse asymmetric PI hysteresis model. Sensors 2015, 15, 3409–3425. [Google Scholar] [CrossRef] [PubMed]
- Park, J.H.; Shim, J.; Lee, D.Y. A compact vertical scanner for atomic force microscopes. Sensors 2010, 10, 10673–10682. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Wang, C.; Gao, R.X.; Yan, R.; Chen, X.; Wang, S. A novel hybrid error criterion-based active control method for on-line milling vibration suppression with piezoelectric actuators and sensors. Sensors 2016, 16, 68. [Google Scholar] [CrossRef] [PubMed]
- Bezryadina, A.S.; Preece, D.C.; Chen, J.C.; Chen, Z. Optical disassembly of cellular clusters by tunable ’tug-of-war’ tweezers. Light Sci. Appl. 2016, 5, e16158. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Chardin, C.; Makles, K.; Caer, C.; Chua, S.; Braive, R.; Robert-Philip, I.; Briant, T.; Cohadon, P.F.; Heidmann, A.; et al. High-finesse Fabry-Perot cavities with bidimensional Si3N4 photonic-crystal slabs. Light Sci. Appl. 2016, 6, e16190. [Google Scholar] [CrossRef]
- Zhou, Z.Y.; Li, Y.; Ding, D.S.; Zhang, W.; Shi, S.; Shi, B.S.; Guo, G.C. Orbital angular momentum photonic quantum interface. Light Sci. Appl. 2016, 5, e16019. [Google Scholar] [CrossRef]
- Kim, H.S.; Cho, Y.M. Design and modeling of a novel 3-DOF precision micro-stage. Mechatronics 2009, 19, 598–608. [Google Scholar] [CrossRef]
- Zhang, D.; Chetwynd, D.; Liu, X.; Tian, Y. Investigation of a 3-DOF micro-positioning table for surface grinding. Int. J. Mech. Sci. 2006, 48, 1401–1408. [Google Scholar] [CrossRef]
- Yong, Y.K.; Moheimani, S.O.R.; Kenton, B.J.; Leang, K.K. High-speed flexure-guided nanopositioning: mechanical design and control issues. Rev. Sci. Instrum. 2012, 83, 121101. [Google Scholar] [CrossRef] [PubMed]
- Yong, Y.K.; Lu, T.F.; Handley, D.C. Review of circular flexure hinge design equations and derivation of empirical formulations. Precis. Eng. 2008, 32, 63–70. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Q. A novel piezoactuated XY stage with parallel, decoupled, and stacked flexure structure for micro-/nanopositioning. IEEE Trans. Ind. Electron. 2011, 58, 3601–3615. [Google Scholar] [CrossRef]
- Cote, F.; Masson, P.; Mrad, N.; Cotoni, V. Dynamic and static modelling of piezoelectric composite structures using a thermal analogy with MSC/NASTRAN. Compos. Struct. 2004, 65, 471–484. [Google Scholar] [CrossRef]
- Dado, M.; Al-Sadder, S. A new technique for large deflection analysis of non-prismatic cantilever beams. Mech. Res. Commun. 2005, 32, 692–703. [Google Scholar] [CrossRef]
- Ang, K.H.; Chong, G.; Li, Y. PID control system analysis, design, and technology. IEEE Trans. Control Syst. Technol. 2005, 13, 559–576. [Google Scholar]
- Zanobini, A.; Sereni, B.; Catelani, M.; Ciani, L. Repeatability and reproducibility techniques for the analysis of measurement systems. Measurement 2016, 86, 125–132. [Google Scholar] [CrossRef]
- Physik Instrumente Products: S315.10. Available online: https://www.physikinstrumente.com/en/products/z-tip-tilt-platforms/piezo-platforms/s-310-s-316-piezo-z-tip-tilt-scanner-300600 (accessed on 29 March 2017).
- Queensgate Products: NPS-Z-15H. Available online: http://www.nanopositioning.com/products/nanomechanisms/nps-z-15h (accessed on 29 March 2017).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stiffness | Pushing Force | Pulling Force | Capacitance | Natural Frequency | Length |
|---|---|---|---|---|---|
| 70 N/m | 1400 N | 150 N | 1.8 F | 30 kHz | 28 mm |
| Elastic Modulus | Poisson Ratio | Density | Allowable Stress |
|---|---|---|---|
| 2.1 × 10 Pa | 0.28 | 7800 kg/m | 355 MPa |
| b | t | R | L |
|---|---|---|---|
| 8 mm | 2 mm | 6 mm | 18 mm |
| Travel Range | Step Response | Linearity | Repeatability (1) | |
|---|---|---|---|---|
| This paper | 12.9 m@open loop | <0.3 s @11 m | 0.21% | 2 nm @5 m |
| 11.5 m@semi-closed loop | 3 nm @10 m | |||
| S315.10 | 12 m@open loop | - | 2%–4% | - |
| NPS-Z-15H | 15 m@closed loop | - | 0.02% | - |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, P.-Z.; Wang, X.-D.; Sui, Y.-X.; Zhang, D.-F.; Wang, D.-F.; Dong, L.-J.; Ni, M.-Y. Piezoelectric Actuated Phase Shifter Based on External Laser Interferometer: Design, Control and Experimental Validation. Sensors 2017, 17, 838. https://doi.org/10.3390/s17040838
Li P-Z, Wang X-D, Sui Y-X, Zhang D-F, Wang D-F, Dong L-J, Ni M-Y. Piezoelectric Actuated Phase Shifter Based on External Laser Interferometer: Design, Control and Experimental Validation. Sensors. 2017; 17(4):838. https://doi.org/10.3390/s17040838
Chicago/Turabian StyleLi, Peng-Zhi, Xiao-Dong Wang, Yong-Xin Sui, De-Fu Zhang, Dong-Fang Wang, Li-Jian Dong, and Ming-Yang Ni. 2017. "Piezoelectric Actuated Phase Shifter Based on External Laser Interferometer: Design, Control and Experimental Validation" Sensors 17, no. 4: 838. https://doi.org/10.3390/s17040838
APA StyleLi, P. -Z., Wang, X. -D., Sui, Y. -X., Zhang, D. -F., Wang, D. -F., Dong, L. -J., & Ni, M. -Y. (2017). Piezoelectric Actuated Phase Shifter Based on External Laser Interferometer: Design, Control and Experimental Validation. Sensors, 17(4), 838. https://doi.org/10.3390/s17040838