
The Modeling and Simulation of the Galvanic Coupling Intra-Body Communication via Handshake Channel


Abstract
:1. Introduction
2. Circuit Model
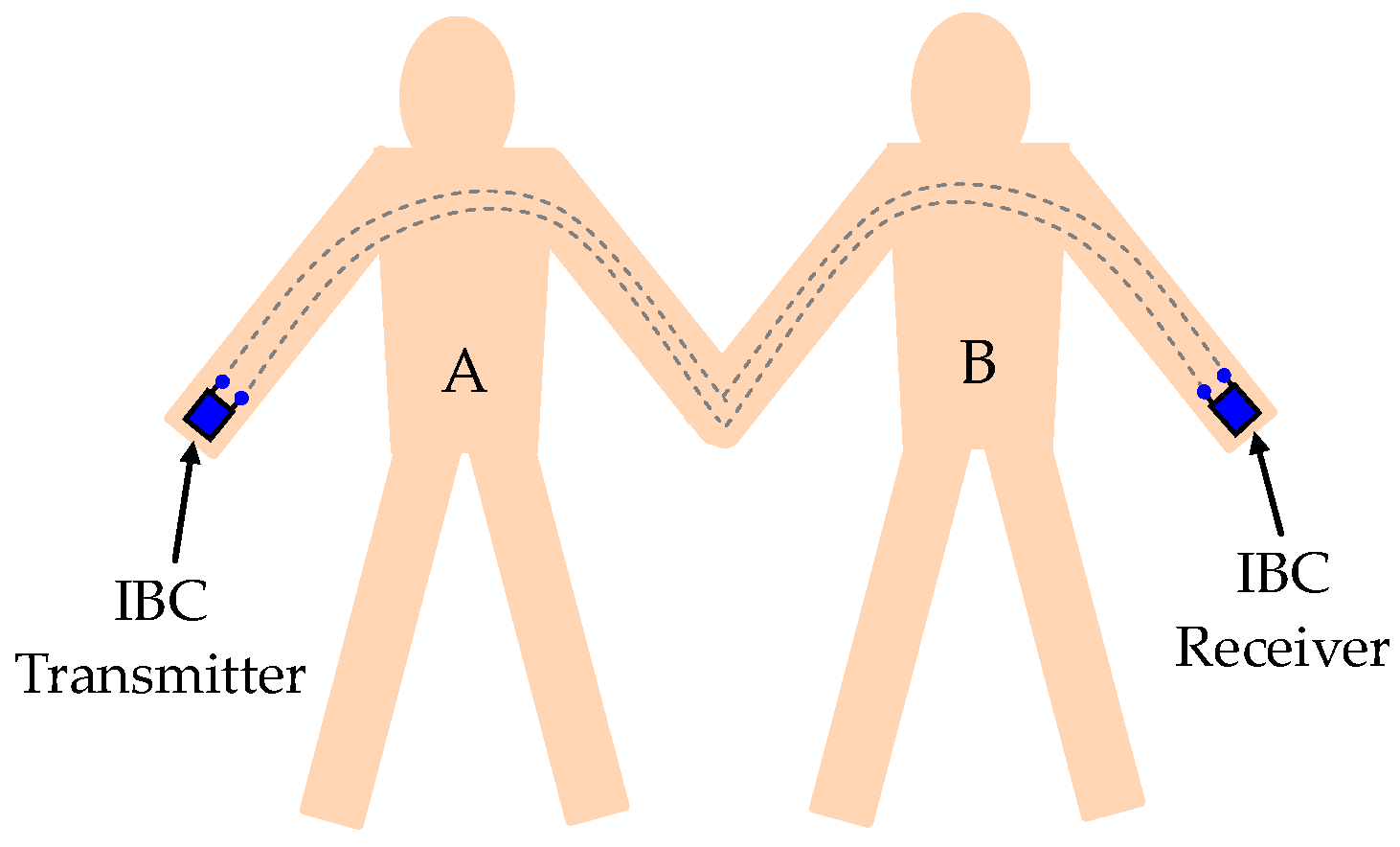
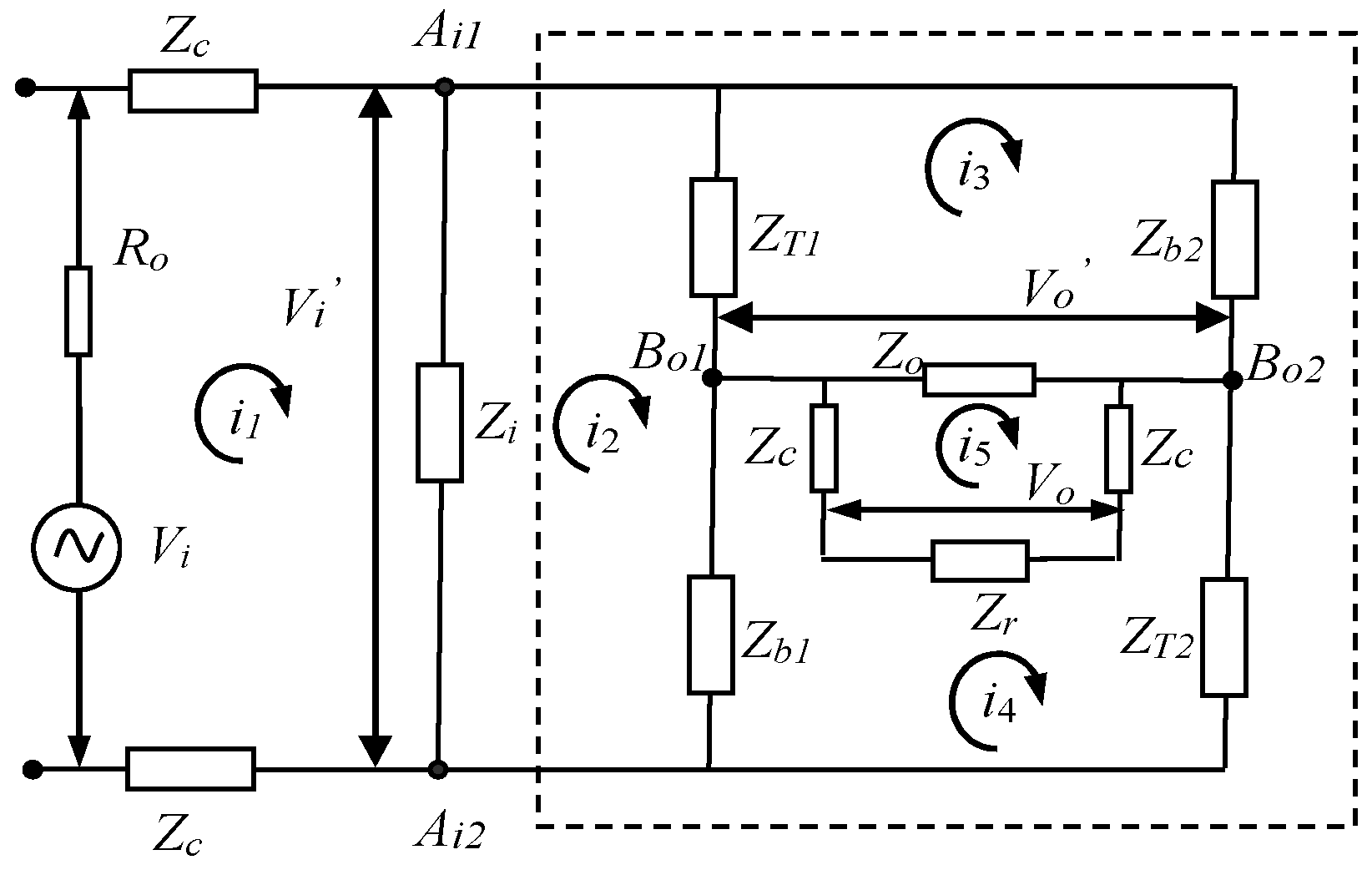
2.1. The Whole Circuit Model
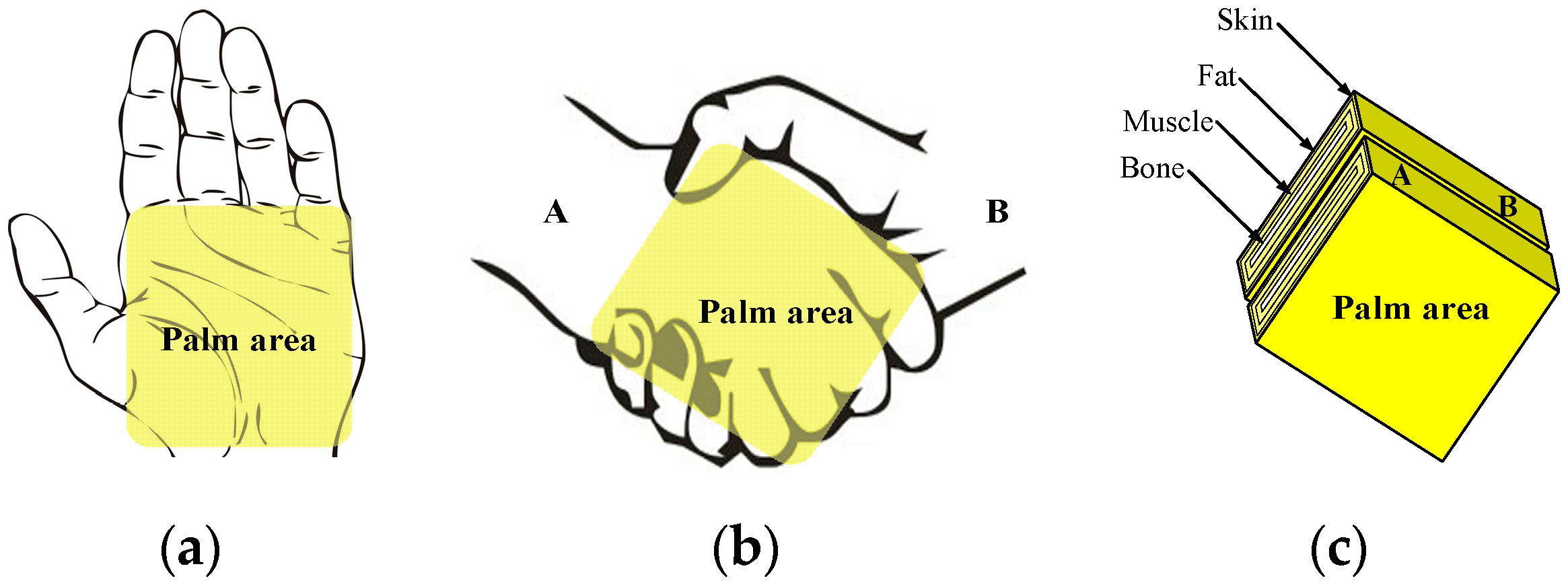
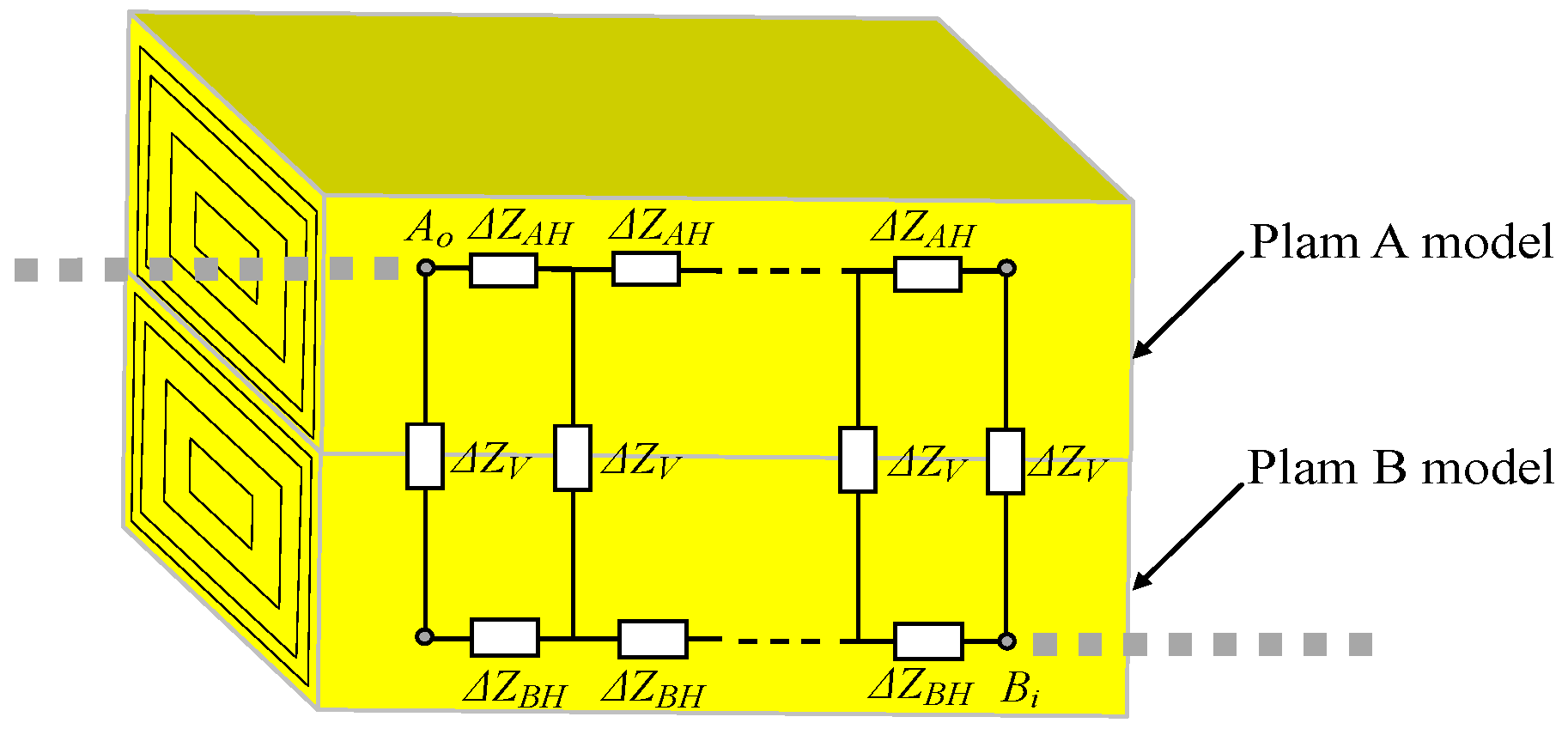
2.2. The Contacting Parts Corresponding to Shaking Hands
2.2.1. Transverse Impedance ZH
2.2.2. Longitudinal Impedance ZV
3. Mathematical Model
3.1. The Transfer Function
3.2. Determination of Zcp
4. Measurements and Analysis
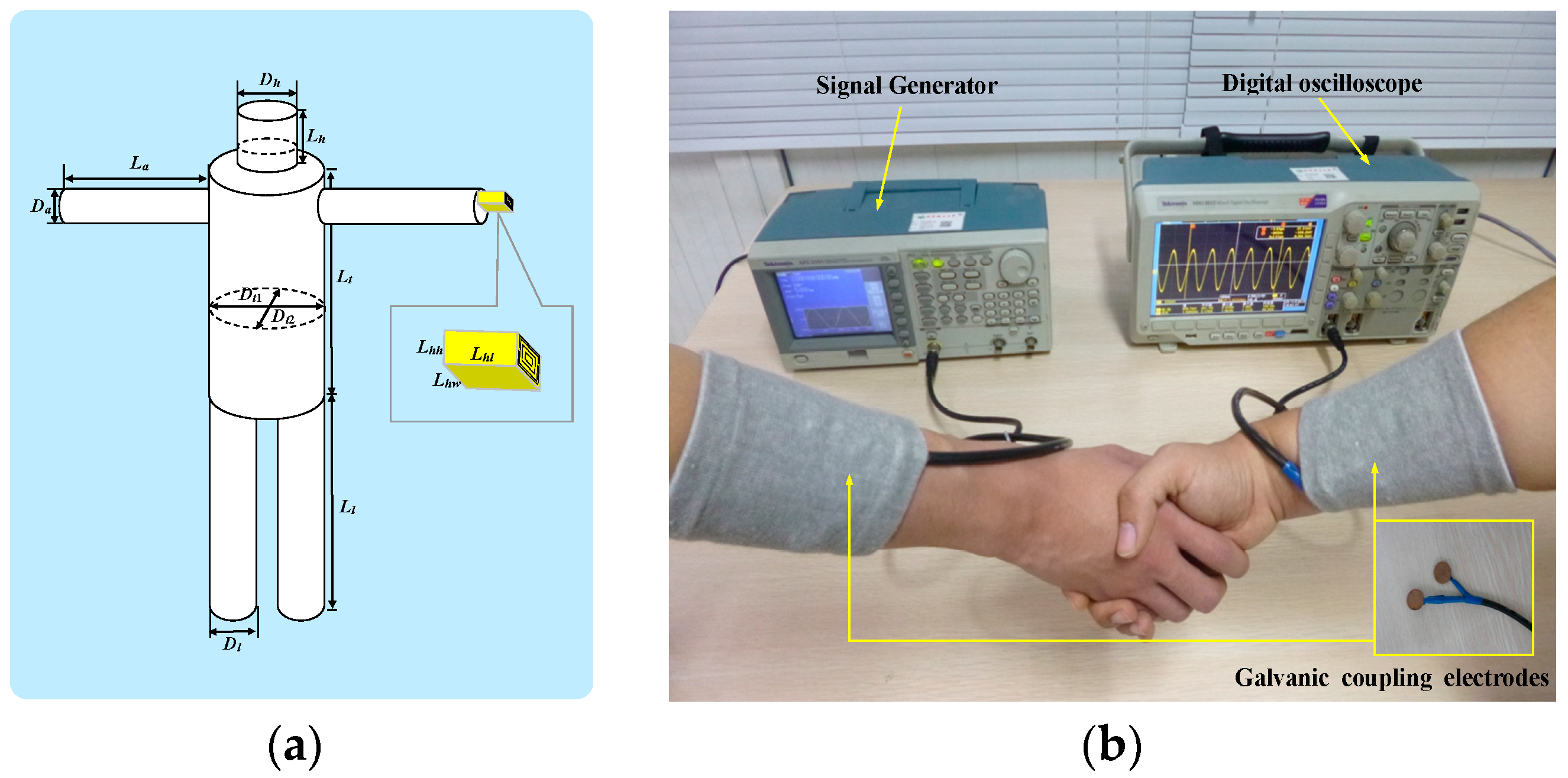
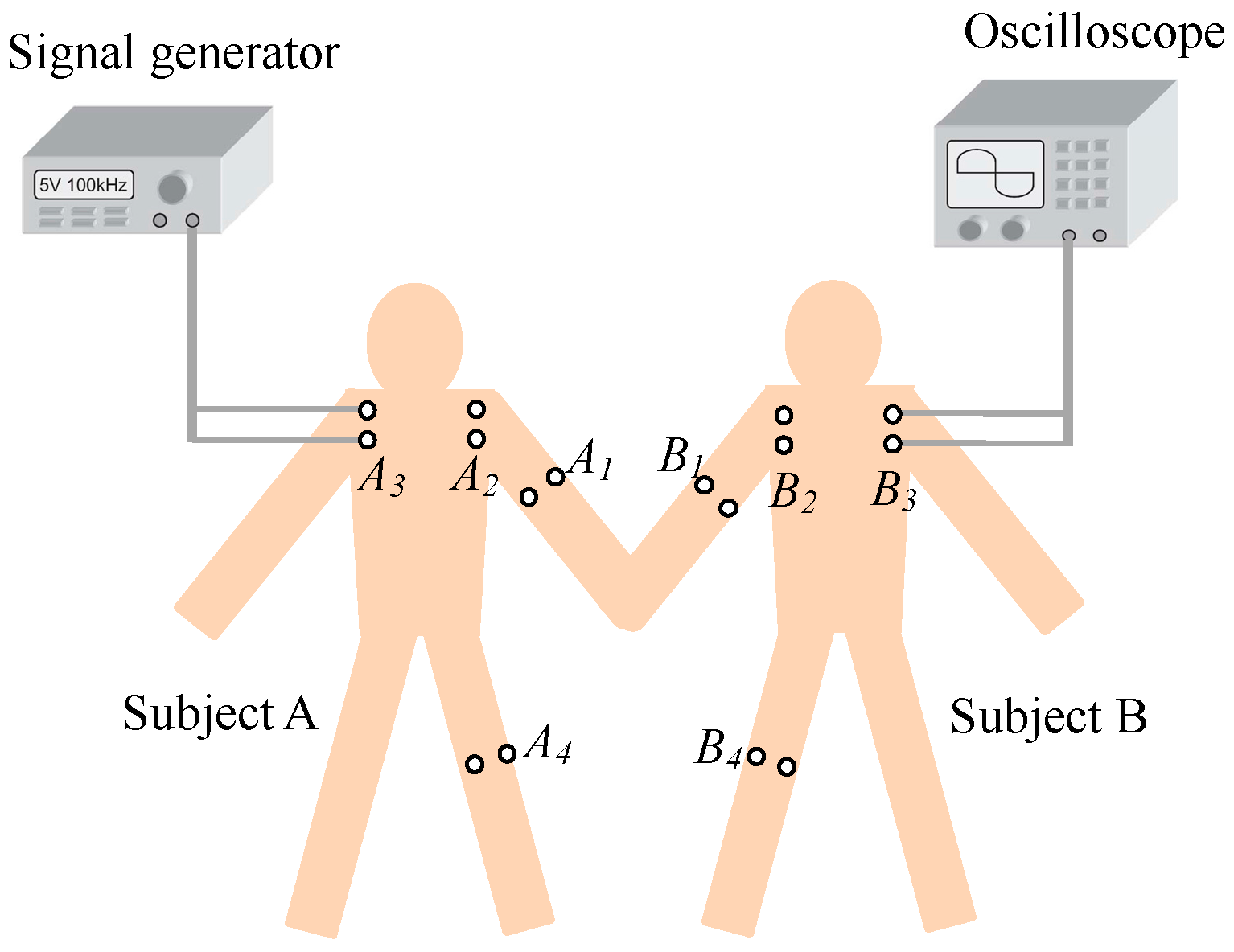
4.1. Measurement Setup
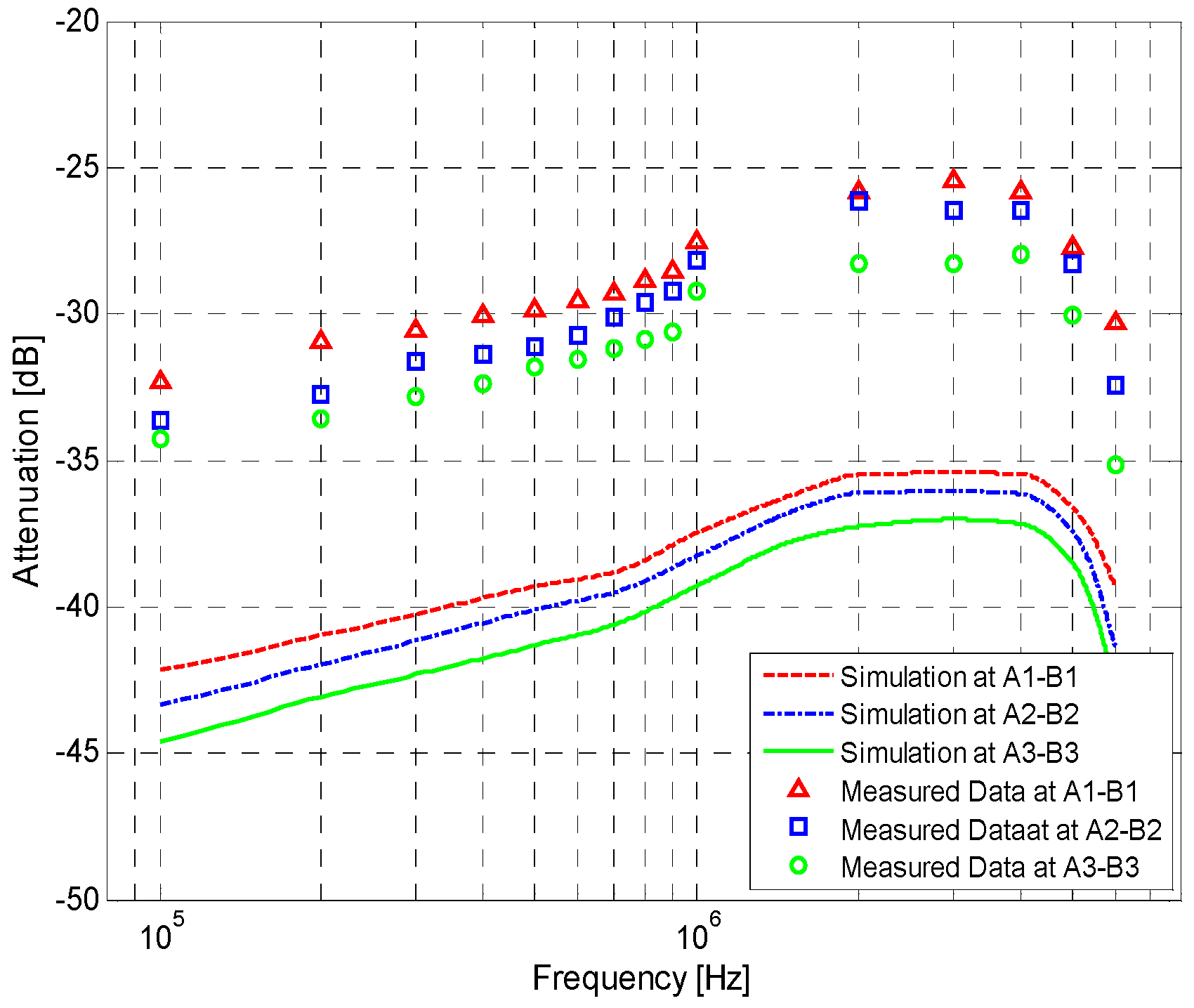
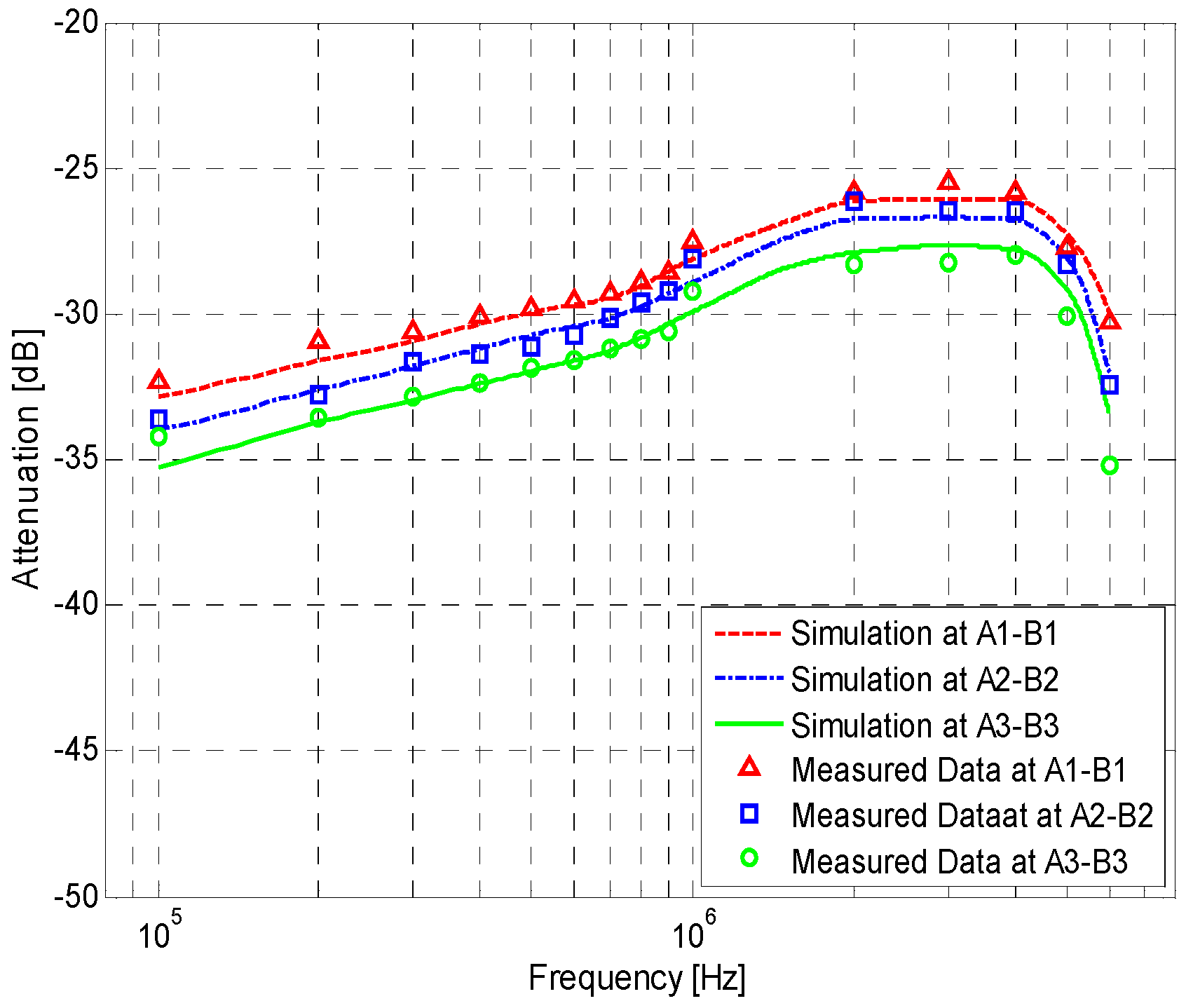
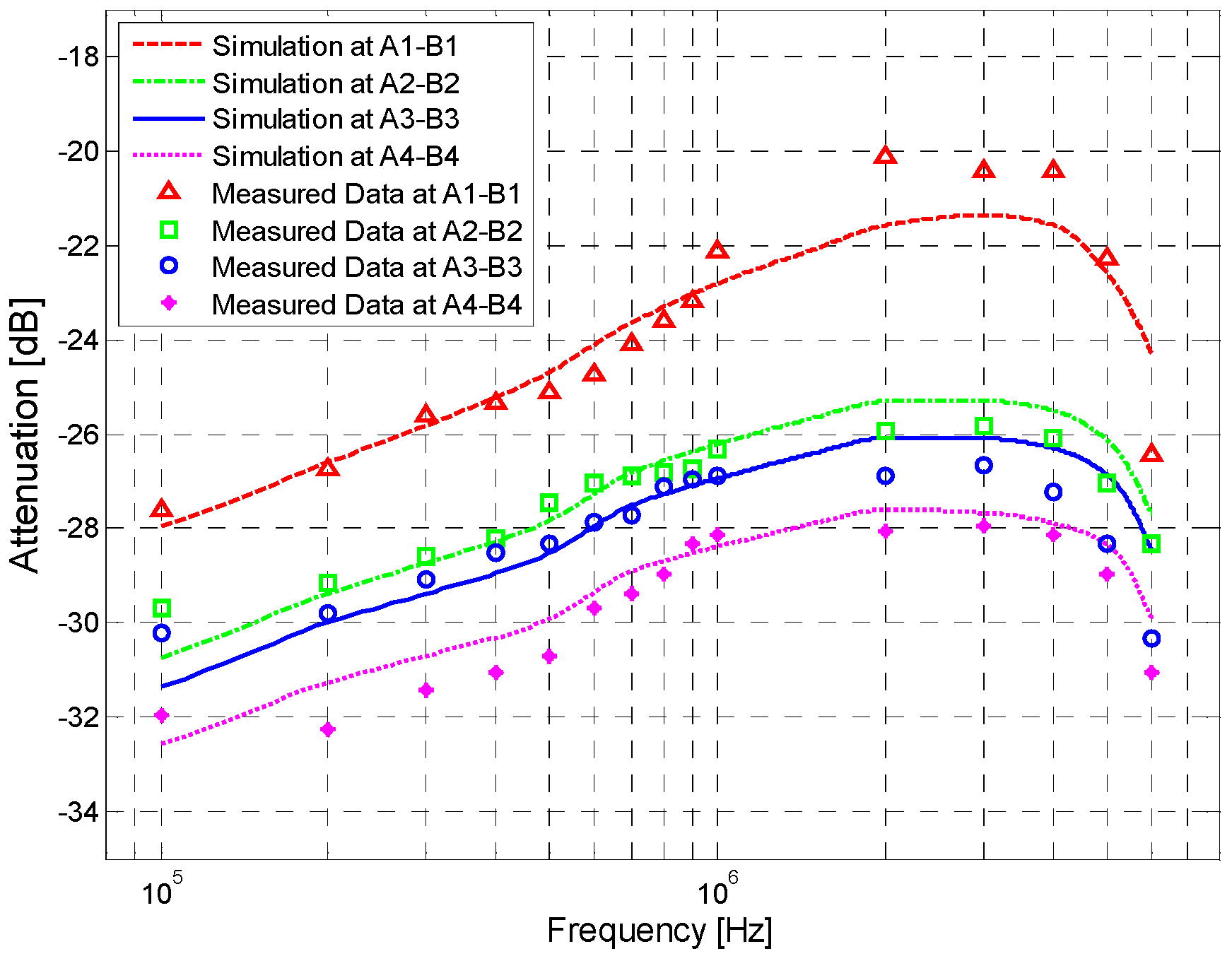
4.2. Signal Transmission of the Different Distances
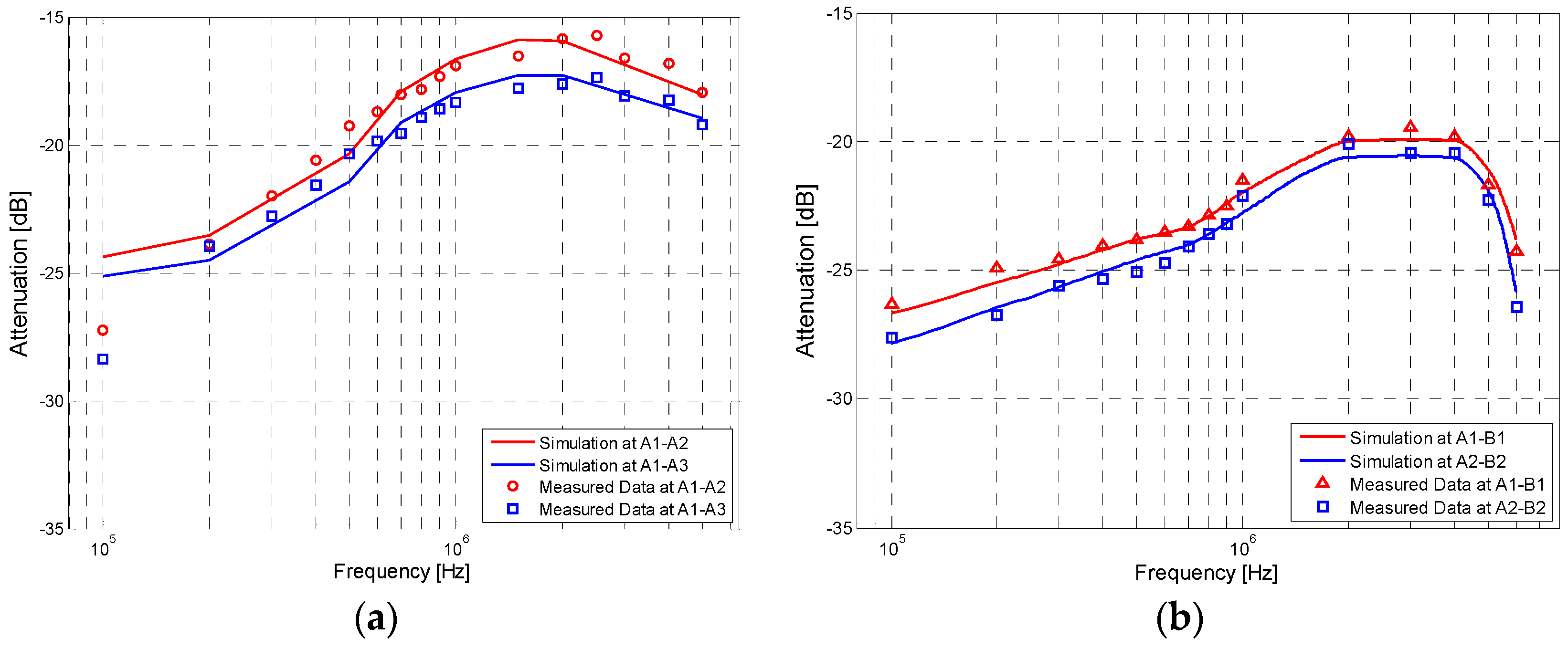
4.3. Signal Transmission within the Different Human Parts
4.4. Comparison between Handshake Channel and Single Body
4.5. Influence of the Distance between the Inter-Electrodes
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| IBC | intra-body communication |
| BSN | body sensor network |
References
- Zimmerman, T.G. Personal Area Networks (PAN): Near-Field Intra-Body Communication; Massachusetts Institute of Technology: Cambridge, MA, USA, 1995. [Google Scholar]
- Gravina, R.; Alinia, P.; Ghasemzadeh, H.; Fortino, G. Multi-sensor fusion in body sensor networks: State-of-the-art and research challenges. Inf. Fusion 2017, 35, 68–80. [Google Scholar] [CrossRef]
- Fortino, G.; Giannantonio, R.; Gravina, R.; Kuryloski, P.; Jafari, R. Enabling Effective Programming and Flexible Management of Efficient Body Sensor Network Applications. IEEE Trans. Hum. Mach. Syst. 2013, 43, 115–133. [Google Scholar] [CrossRef]
- Iyengar, S.; Bonda, F.T.; Gravina, R.; Guerrieri, A.; Fortino, G.; Sangiovanni-Vincentelli, A. A framework for creating healthcare monitoring applications using wireless body sensor networks. In Proceedings of the ICST 3rd International Conference Body Area Networks, Tempe, AZ, USA, 13–17 March 2008. [Google Scholar]
- Shinagawa, M.; Fu, M.; Ochiai, K.; Kyuragi, H. A near-field-sensing transceiver for intrabody communication based on the electrooptic effect. IEEE Trans. Instrum. Meas. 2004, 6, 1533–1538. [Google Scholar] [CrossRef]
- Cho, N.; Yoo, J.; Song, S.J.; Lee, J.; Jeon, S.; Yoo, H.J. The human body characteristics as a signal transmission medium for intrabody communication. IEEE Trans. Microw. Theory Tech. 2007, 55, 1080–1085. [Google Scholar] [CrossRef]
- Fujikawa, M.; Nishigaki, M. A Study of Prevention for Social Engineering Attacks Using Real/Fake Organization’s Uniforms: Application of Radio and Intra-Body Communication Technologies. In Proceedings of the Sixth International Conference on Availability, Reliability and Security, Vienna, Austria, 22–26 August 2011; pp. 597–602. [Google Scholar]
- Shimamoto, S.; Alsehab, A.M.; Kobayashi, N.; Dovchinbazar, D.; Ruiz, J.A. Future applications of body area communications. In Proceedings of the 6th International Conference on Information, Communications & Signal Processing, Singapore, 10–13 December 2007; pp. 1–5. [Google Scholar]
- Ruiz, J.A.; Shimamoto, S. Novel communication services based on human body and environment interaction: Applications inside trains and applications for handicapped people. In Proceedings of the IEEE Wireless Communications and Networking Conference, Las Vegas, NV, USA, 3–6 April 2006; pp. 2240–2245. [Google Scholar]
- Zimmerman, T.G. Personal Area Networks: Near-field intrabody. IBM Syst. J. 1996, 35, 609–617. [Google Scholar] [CrossRef]
- Hachisuka, K.; Terauchi, Y.; Kishi, Y.; Sasaki, K.; Hirota, T.; Hosaka, H.; Fujii, K.; Takahashi, M.; Ito, K. Simplified circuit modeling and fabrication of intrabody communication devices. Sens. Actuators A Phys. 2006, 130–131, 322–330. [Google Scholar] [CrossRef]
- Hachisuka, K.; Nakata, A.; Takeda, T.; Shiba, K.; Sasaki, K.; Hosaka, H.; Itao, K. Development of wearable intra-body communication devices. Sens. Actuators A Phys. 2003, 105, 109–115. [Google Scholar] [CrossRef]
- Ferguson, J.E.; Redish, A.D. Wireless communication with implanted medical devices using the conductive properties of the body. Expert Rev. Med. Devices 2011, 8, 427–433. [Google Scholar] [CrossRef] [PubMed]
- Matsushita, N.; Tajima, S.; Ayatsuka, Y.; Rekimoto, J. Wearable key: Device for personalizing nearby environment. Digest of Papers. In Proceedings of the Fourth International Symposium on Wearable Computers, Atlanta, GA, USA, 2000. [Google Scholar]
- Chen, X.M.; Mak, P.U.; Pun, S.H.; Gao, Y.M.; Lam, C.T.; Vai, M.I.; Du, M. Study of Channel Characteristics for Galvanic-Type Intra-Body Communication Based on a Transfer Function from a Quasi-Static Field Model. Sensors 2012, 12, 16433–16450. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.M.; Pun, S.H.; Zhao, J.F.; Mak, P.U.; Liang, B.D.; Vai, M.I. Effects of human limb gestures on galvanic coupling intra-body communication for advanced healthcare system. Biomed. Eng. Online 2016, 15, 60. [Google Scholar] [CrossRef] [PubMed]
- Vai, M.I.; Du, M.; Gao, Y.M.; Wu, Z.M.; Pun, S.H.; Mak, P.U. A Novel Field-Circuit FEM Modeling and Channel Gain Estimation for Galvanic Coupling Real. Sensors 2016, 16, 471. [Google Scholar]
- Kibret, B.; Seyedi, M.; Lai, D.T.H.; Faulkner, M. Investigation of galvanic-coupled intrabody communication using the human body circuit model. IEEE J. Biomed. Health Inform. 2014, 18, 1196–1206. [Google Scholar] [CrossRef] [PubMed]
- Hachisuka, K.; Terauchi, Y.; Kishi, Y.; Hirota, T.; Sasaki, K.; Hosaka, H.; Ito, K. Simplified circuit modeling and fabrication of intrabody communication devices. In Proceedings of the 13th International Conference on Solid-State Sensors, Actuators and Microsystems, Seoul, Korea, 5–9 June 2005. [Google Scholar]
- Wegmueller, M.S. Intra-Body Communication for Biomedical Sensor Networks. Ph.D. Thesis, Swiss Federal Institude of Technology Zurich (ETH), Zurich, Switzerland, 2007. [Google Scholar]
- Pun, S.H.; Gao, Y.M.; Mak, P.; Vai, M.I.; Du, M. Quasi-static modeling of human limb for intra-body communications with experiments. IEEE Trans. Inf. Technol. Biomed. 2011, 15, 870–876. [Google Scholar] [PubMed]
- Kagimoto, K.; Anzai, D.; Wang, J. Approaching direction detection of human arm using human body communication technology. In Proceedings of the 2012 Asia-Pacific Symposium on Electromagnetic Compatibility, Singapore, 21–24 May 2012; pp. 461–464. [Google Scholar]
- Song, Y.; Hao, Q.; Zhang, K.; Wang, M.; Chu, Y.F.; Kang, B.Z. The simulation method of the galvanic coupling intrabody communication with different signal transmission paths. IEEE Trans. Instrum. Meas. 2011, 60, 1257–1266. [Google Scholar] [CrossRef]
- Gabriel, S.; Lau, R.W.; Gabriel, C. The dielectric properties of biological tissues: III. Parametric models for the dielectric spectrum of tissues. Phys. Med. Biol. 1996, 41, 2271–2293. [Google Scholar] [CrossRef] [PubMed]
- Callejon, M.A.; Reina-Tosina, J.; Naranjo-Hernandez, D.; Roa, L.M. Galvanic coupling transmission in intrabody communication: A finite element approach. IEEE Trans. Biomed. Eng. 2014, 61, 775–783. [Google Scholar] [CrossRef] [PubMed]
- Wegmueller, M.S.; Kuhn, A.; Froehlich, J.; Oberle, M.; Felber, N.; Kuster, N.; Fichtner, W. An attempt to model the human body as a communication channel. IEEE Trans. Biomed. Eng. 2007, 54, 1851–1857. [Google Scholar] [CrossRef] [PubMed]
- Wegmueller, M.S.; Oberle, M.; Felber, N.; Kuster, N.; Fichtner, W. Signal Transmission by Galvanic Coupling through the Human Body. IEEE Trans. Instrum. Meas. 2010, 59, 963–969. [Google Scholar] [CrossRef]
- Ito, K.; Hotta, Y. Signal Path Loss Simulation of Human Arm for Galvanic Coupling Intra-Body Communication Using Circuit and Finite Element Method Models. In Proceedings of the 2015 IEEE Twelfth International Symposium Auton Decentralized System, Taichung, Taiwan, 25–27 March 2015; pp. 230–235. [Google Scholar]
- Callejón, M.A.; Naranjo-Hernández, D.; Reina-Tosina, J.; Roa, L.M. A Comprehensive Study into Intrabody Communication Measurements. IEEE Trans. Instrum. Meas. 2013, 62, 2446–2455. [Google Scholar] [CrossRef]
- Gao, Y.-M.; Wu, Z.-M.; Pun, S.-H.; Mak, P.-U.; Vai, M.-I.; Du, M. A Novel Field-Circuit FEM Modeling and Channel Gain Estimation for Galvanic Coupling Real IBC Measurements. Sensors 2016, 16, 471. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Zhang, K.; Hao, Q.; Hu, L.; Wang, J.; Shang, F. A Finite-Element Simulation of Galvanic Coupling Intra-Body Communication Based on the Whole Human Body. Sensors 2012, 12, 13567–13582. [Google Scholar] [CrossRef] [PubMed]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject | Age | BMI | Weight/kg | Head/cm | Arm/cm | Hand/cm | Leg/cm | Torso/cm | |||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Dh | Da | Lhl | Lhw | Lhh | Dl | Dt1 | Dt2 | ||||
| Subject A | 24 | 38.67 | 71 | 18 | 10.0 | 9.2 | 8.1 | 2.0 | 29 | 30 | 20 |
| Subject B | 23 | 20.67 | 67 | 18 | 10.2 | 8.9 | 8.0 | 2.0 | 27 | 29 | 20 |
| Frequency | Zc | ZAt1/ZAt2 | ZBt1/ZBt2 | Zi | Zo | Zcp | R0 | Zr |
|---|---|---|---|---|---|---|---|---|
| 0.1 MHz | 206 Ω | (534.2 × L) Ω | (505.6 × L) Ω | 2083.1 Ω | 2088.7 Ω | 824 Ω | 50 Ω | 1 MΩ |
| 495.0 pF | (0.386/L) nF | (0.406/L) nF | 15.10 pF | 14.3 pF | 111 µF | |||
| 1 MHz | 126 Ω | (328.1 × L) Ω | (312.5 × L) Ω | 1437.9 Ω | 1509.8 Ω | 532.5 Ω | ||
| 200.5 pF | (0.135/L) nF | (0.141/L) nF | 4.69 pF | 4.467 pF | 405 µF |
| Frequency/MHz | 0.1 | 0.2 | 0.5 | 0.7 | 1 | 1.5 | 3 | 5 |
|---|---|---|---|---|---|---|---|---|
| Average/dB | −32.32 | −30.93 | −31.11 | −30.11 | −28.13 | −26.12 | −26.44 | −32.46 |
| Standard Deviation/dB | 0.75 | 0.87 | 1.07 | 1.34 | 1.37 | 1.63 | 0.88 | 1.40 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Song, Y.; Li, W.; Wang, G.; Bu, T.; Zhao, Y.; Hao, Q. The Modeling and Simulation of the Galvanic Coupling Intra-Body Communication via Handshake Channel. Sensors 2017, 17, 863. https://doi.org/10.3390/s17040863
Li M, Song Y, Li W, Wang G, Bu T, Zhao Y, Hao Q. The Modeling and Simulation of the Galvanic Coupling Intra-Body Communication via Handshake Channel. Sensors. 2017; 17(4):863. https://doi.org/10.3390/s17040863
Chicago/Turabian StyleLi, Maoyuan, Yong Song, Wansong Li, Guangfa Wang, Tianpeng Bu, Yufei Zhao, and Qun Hao. 2017. "The Modeling and Simulation of the Galvanic Coupling Intra-Body Communication via Handshake Channel" Sensors 17, no. 4: 863. https://doi.org/10.3390/s17040863
APA StyleLi, M., Song, Y., Li, W., Wang, G., Bu, T., Zhao, Y., & Hao, Q. (2017). The Modeling and Simulation of the Galvanic Coupling Intra-Body Communication via Handshake Channel. Sensors, 17(4), 863. https://doi.org/10.3390/s17040863