A Novel Method of Localization for Moving Objects with an Alternating Magnetic Field

Abstract
:1. Introduction
2. Theoretical Analysis of Localization Method
2.1. The Initial Phase of Alternating Magnetic Field Signal
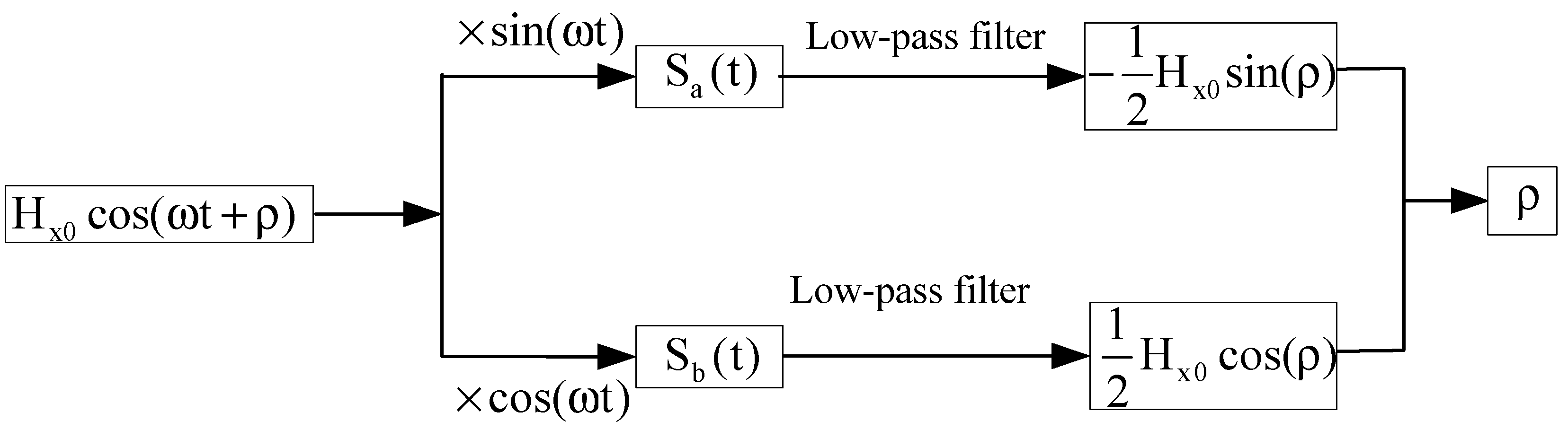
2.2. The Coherent Demodulation of Alternating Magnetic Field Signal
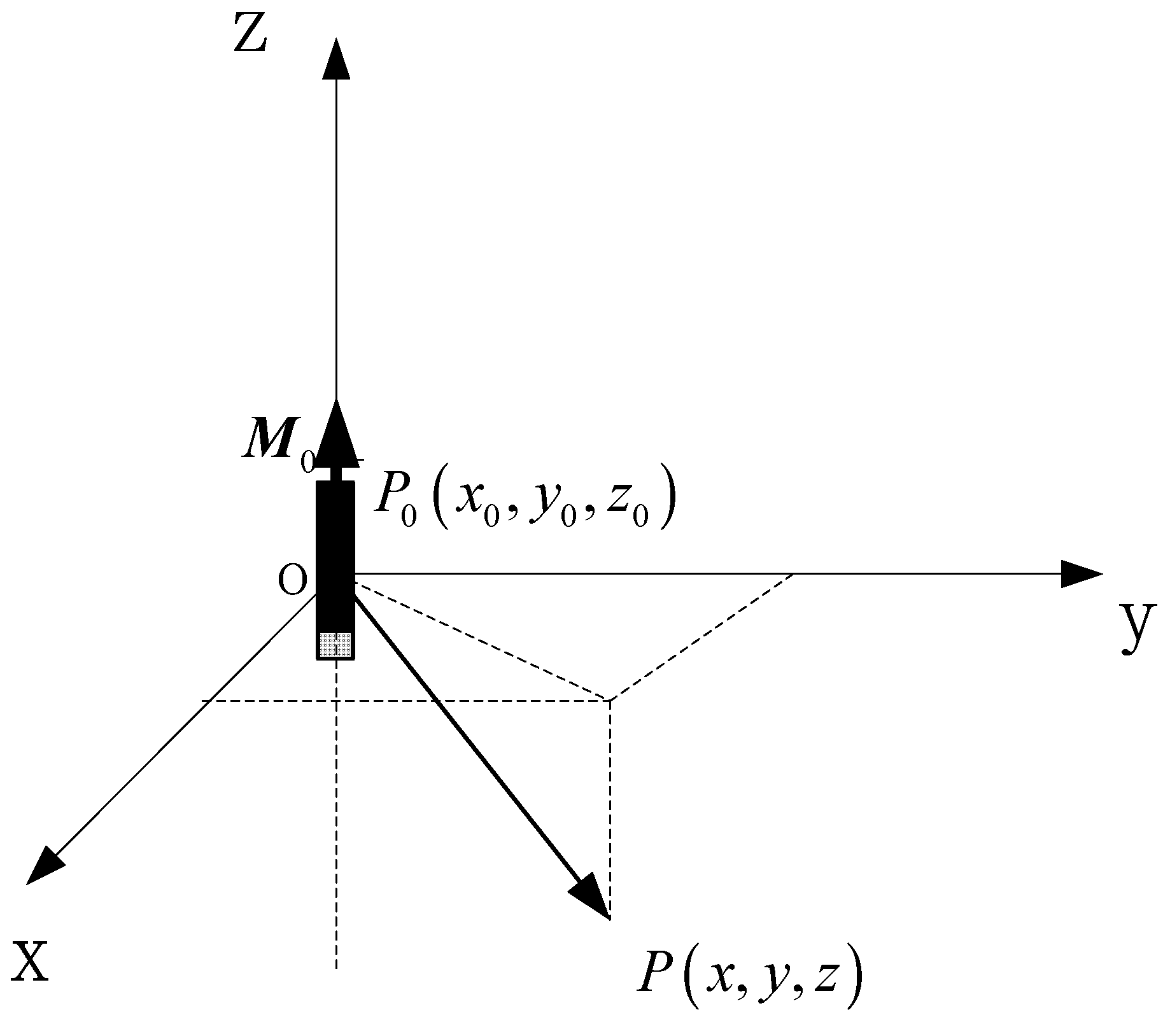
2.3. The Locating Model of Magnetic Field Signal
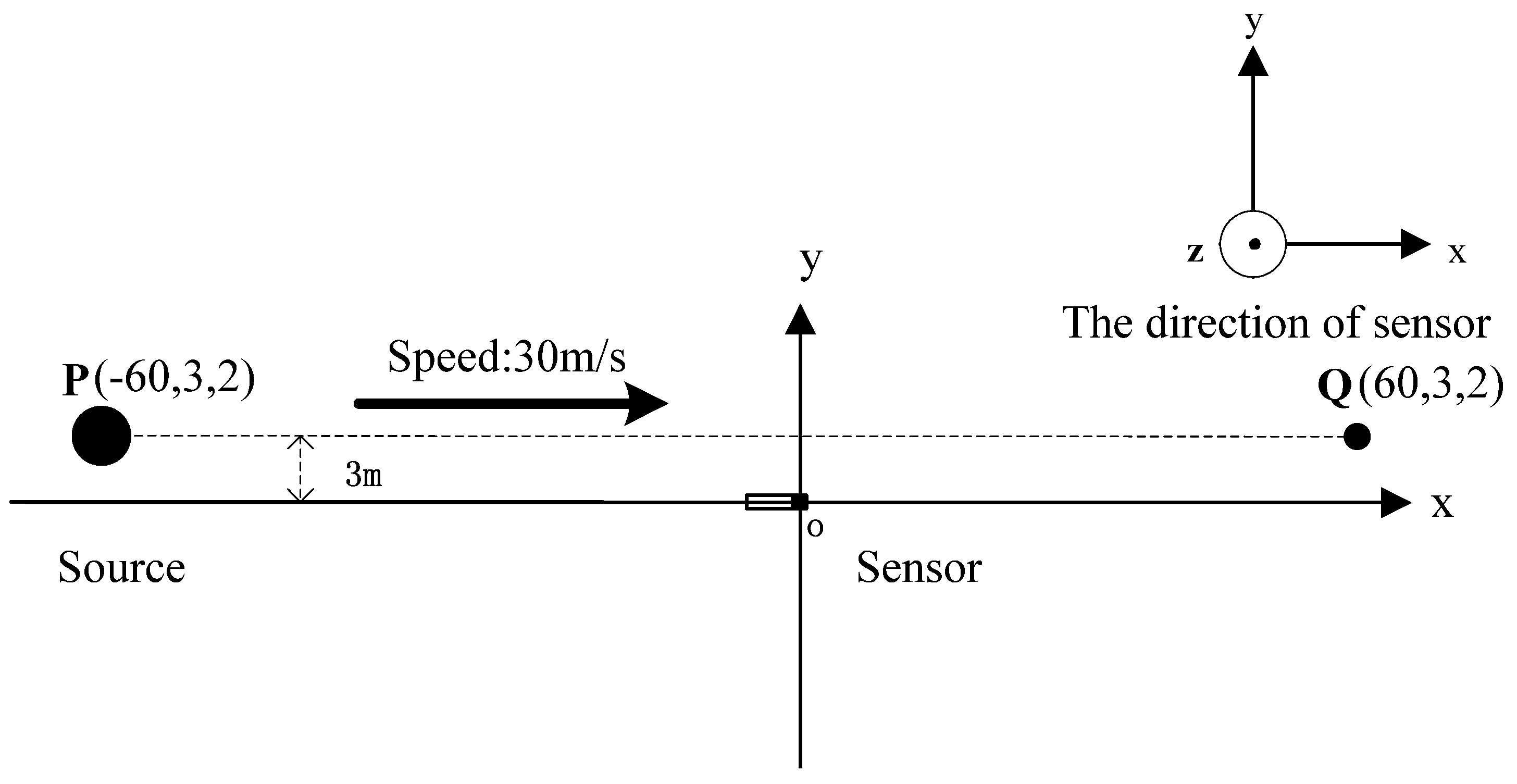
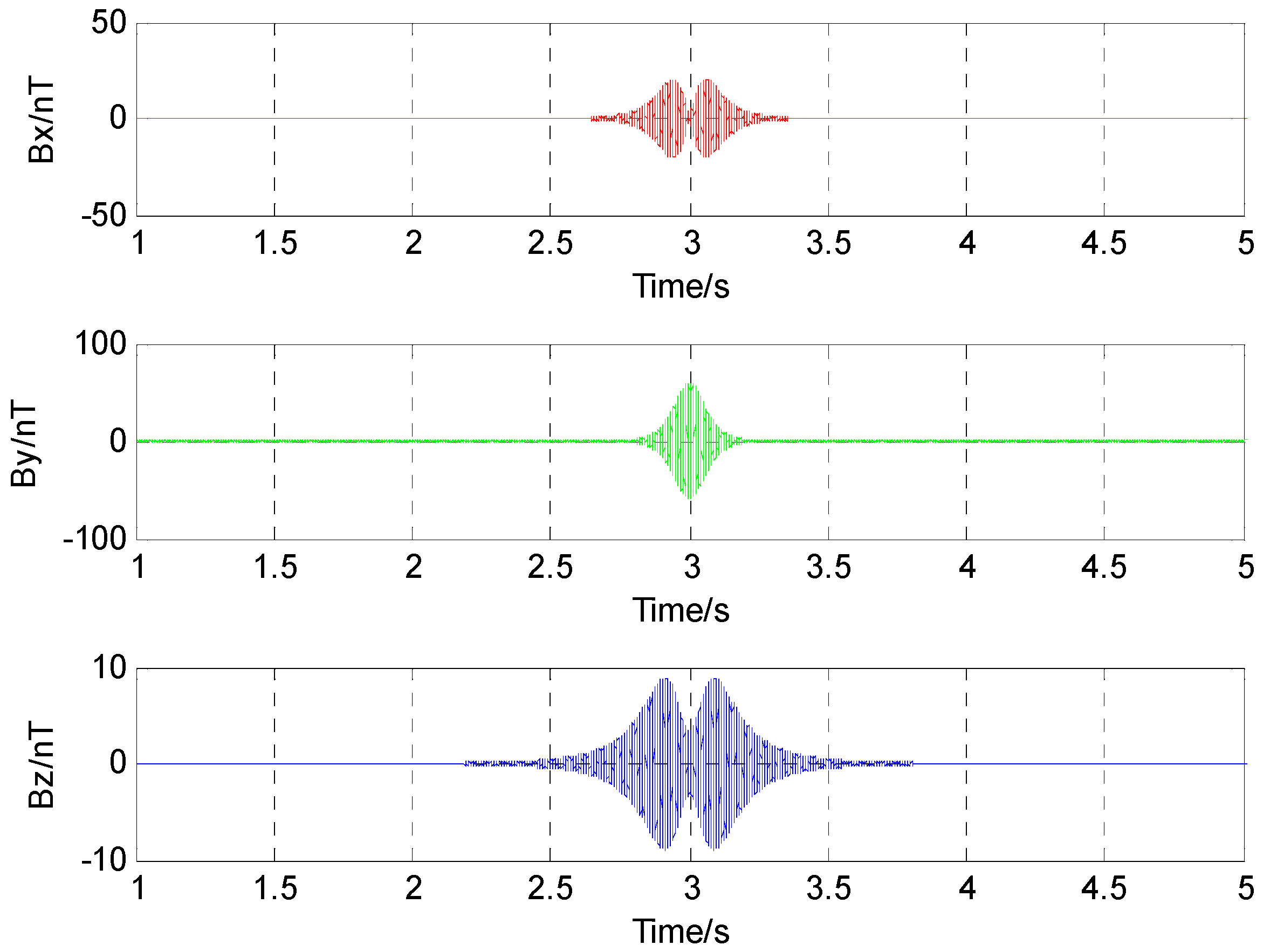
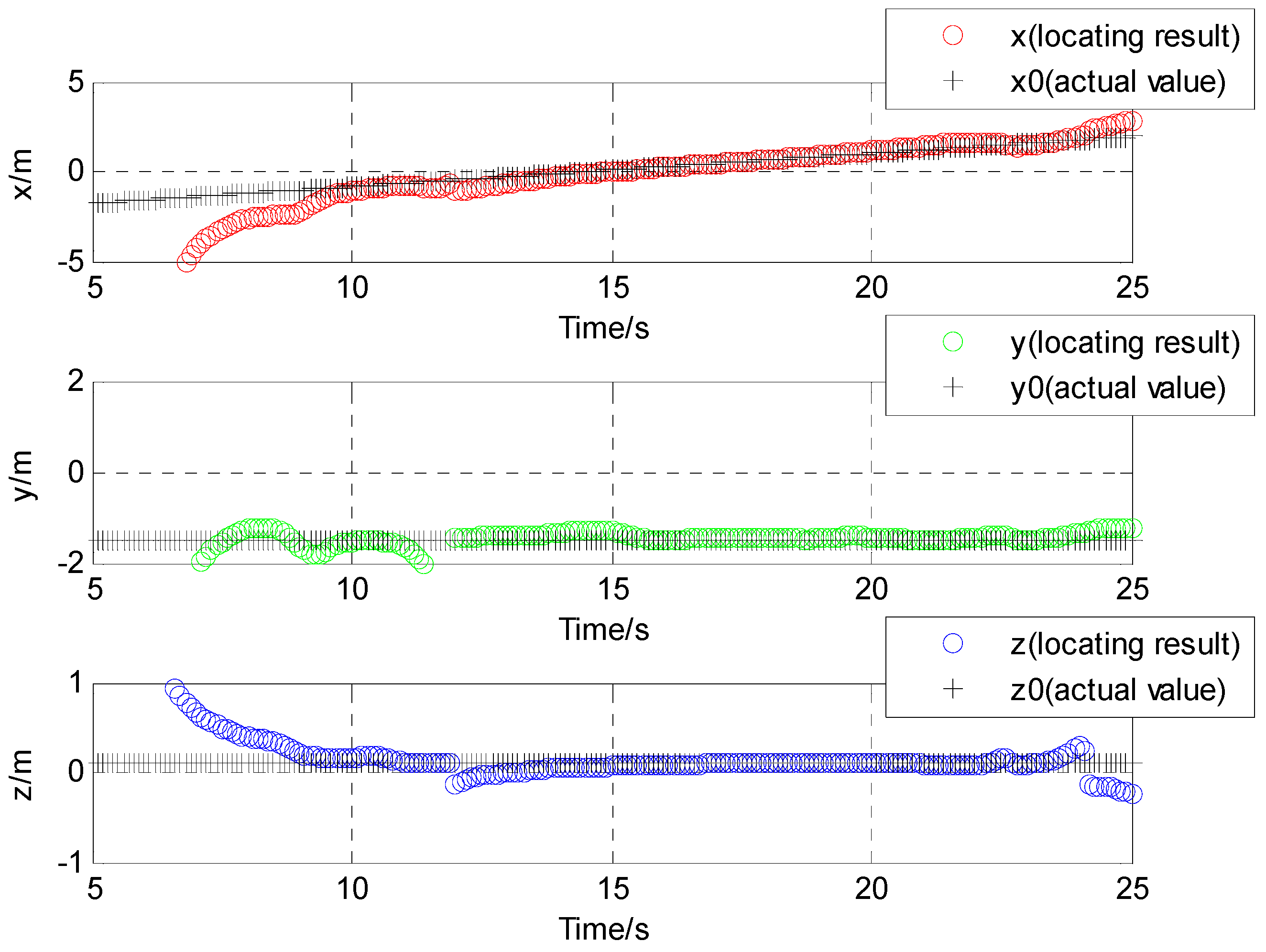
3. Simulations
4. Experimental Tests
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Axis Number | 3 |
| Measuring Range | ±70 μT |
| Sensitivity | 7 μT/V |
| Band Width | DC~1 kHz(<0.5 dB) |
| Linearity | ≤0.01% FS |
| Orthogonality Error | ≤±0.2° |
| Time Domain Noise | <0.1nT RMS@10 points per sec. |
| Frequency Domain Noise | 10~20 pT/rms √Hz@1Hz |
| Working Voltage | ±13 V~±17 VDC, with power indicator |
| Power Consumption | ≤0.4 W |
| Weight | <160 g |
| Product Size | 30 mm × 30 mm × 120 mm |
| Number of channels | 4 analog input channels |
| ADC resolution | 24 bits |
| Type of ADC | Delta-Sigma (with analog prefiltering) |
| Sampling mode | Simultaneous |
| Frequency | 12.8 MHz |
| Accuracy | ±100 ppm maximum |
| Data rate range (fs) using internal master timebase | 1.613 kS/s–50 kS/s |
| Data rate range (fs) using external master timebase | 390.625 S/s~51.2 kS/s |
References
- Merlat, L.; Naz, P. Magnetic Localization and Identification of Vehicles. Appl. Proc. SPIE 2003, 5090, 174–185. [Google Scholar]
- Wynn, W.M.; Frahm, C.P.; Carroll, P.J.; Clark, R.H.; Wellhoner, J.; Wynn, M.J. Advanced Superconducting Gradiometer/Magnetometer Arrays and A Novel Signal Processing Technique. IEEE Trans. Magn. 1975, 11, 701–707. [Google Scholar] [CrossRef]
- Wynn, W.M. Magnetic Dipole Localization Using the Gradient Rate Tensor Measured by A Five-axis Gradiometer with Known Velocity. Proc. SPIE 1995, 2496, 357–367. [Google Scholar]
- Wiegert, R.F.; Price, B.L. Magnetic Anomaly Sensing System and Methods for Maneuverable Sensing Platforms. U.S. Patent 6476,7610, 1 May 2002. [Google Scholar]
- Wiegert, R.F. Magnetic Anomaly Sensing System for Detection, Localization and Classification of Magnetic Objects. U.S. Patent 6,841,994, 1 January 2005. [Google Scholar]
- Wiegert, R.F.; Oeschger, J. Generalized Magnetic Gradient Contraction Based Method for Detection, Localization and Discrimination of Underwater Mines and Unexploded Ordnance. In Proceedings of the Oceans 2005, Washington, DC, USA, 17–23 September 2005. [Google Scholar]
- Wiegert, R.F.; Price, B.L. Magnetic Sensor Development for Mine Counter measures Using Autonomous Underwater Vehicles. Proc. SPIE 2000, 4039, 93–103. [Google Scholar]
- Wiegert, R.F. Magnetic Anomaly Guidance System and Method. U.S. Patent 6,865,455, 8 March 2005. [Google Scholar]
- Wiegert, R.F.; Price, B.L.; Hyder, J. Magnetic Anomaly Sensing System for Mine Counter measures Using High Mobility Autonomous Sensing Platforms. In Proceedings of the Oceans 2002, Biloxi, MS, USA, 29–31 October 2002. [Google Scholar]
- Wiegert, R.F. Magnetic Anomaly Guidance System for Mine Counter measures Using Autonomous Underwater Vehicles. In Proceedings of the Oceans 2003, San Diego, CA, USA, 22–26 September 2003. [Google Scholar]
- Wiegert, R.F.; Oeschger, J.; Purpura, J.W. Magnetic Scalar Triangulation and Ranging System for Detection, Localization and Classification of Magnetic Targets. In Proceedings of the Oceans 2004, Kobe, Japan, 9–12 November 2004. [Google Scholar]
- Wiegert, R.F. Portable Magnetic Sensing System for Real-Time, Point-by-Point Detection, Localization and Classification of Magnetic Objects. U.S. Patent 7,688,072, 30 March 2010. [Google Scholar]
- Wiegert, R.F. Magnetic Anomaly Sensing System for Detection, Localization and Classification of a Magnetic Object in a Cluttered Field of Magnetic Anomalies. U.S. Patent 7,603,251, 13 October 2009. [Google Scholar]
- Wiegert, R.F.; Oeschger, J.; Tuovila, E. Demonstration of a Novel Man-Portable Magnetic STAR Technology for Real-Time Localization of Unexploded Ordnance. In Proceedings of the Oceans 2007, Aberdeen, UK, 18–21 June 2007. [Google Scholar]
- Wiegert, R.F. Magnetic STAR technology for real-time localization and classification of unexploded ordnance and buried mines. Proc. SPIE 2009, 7303, l–9. [Google Scholar]
- Hirota, M.; Furuse, T.; Ebana, K.; Kubo, H.; Tsushima, H.; Inaba, T.; Shima, A.; Fujinuma, M.; Tojyo, N. Magnetic Detection of a Surface Ship by an Airborne LTS SQUID MAD. IEEE Trans. Appl. Supercond. 2001, 11, 884–887. [Google Scholar] [CrossRef]
- Heath, P.; Henson, G.; Greenhalgh, S. Some comments on potential field tensor data. Explor. Geophys. 2003, 34, 57–62. [Google Scholar] [CrossRef]
- Vaizer, L.; Lathrop, J.; Bono, J. Localization of magnetic dipole targets. In Proceedings of the Oceans 2004, Kobe, Japan, 9–12 November 2004. [Google Scholar]
- Seheinker, A.; Lerner, B.; Salomonski, N.; Ginzburg, B.; Frumkis, L.; Kaplan, B.Z. Localization and magnetic moment estimation of a ferromagnetic target by simulated annealing. Meas. Sci. Technol. 2007, 18, 3451–3457. [Google Scholar] [CrossRef]
- Wahlstrom, N.; Callmer, J.; Gustafsson, F. Magnetometer for Tracking Metallic Targets. In Proceedings of the 13th International Conference on Information Fusion, Edinburgh, UK, 26–29 July 2010. [Google Scholar]
- Wahlstrom, N.; Gustafsson, F. Magnetometer Modeling and Validation for Tracking Metallic Targets. IEEE Trans. Signal Process. 2014, 62, 545–556. [Google Scholar] [CrossRef]
- Roger, A.; Eyal, W.; Tsuriel, R.C.; Nir, G.; Idan, Y. A Dedicated Genetic Algorithm for Localization of Moving Magnetic Objects. Sensors 2015, 15, 23788–23804. [Google Scholar]
- Raad, F.H.; Blood, E.D.; Steiner, T.O.; Jones, H.R. Magnetic position and orientation tracking system. IEEE Trans. Aerosp. Electron. Syst. 1979, 5, 709–717. [Google Scholar]
- Paperno, E.; Sasada, I.; Leonovich, E. A New Method for Magentic Position and Orientation Tracking. IEEE Trans. Magn. 2001, 37, 4. [Google Scholar] [CrossRef]
- Nara, T.; Suzuki, S.; Ando, S. A Closed-Form Formula for Magnetic Dipole Localization by Measurement of Its Magnetic Field and Spatial Gradients. IEEE Trans. Magn. 2006, 42, 10. [Google Scholar] [CrossRef]
- Pi, X.; Zhao, S.; Liu, H.; Xia, B.; Shi, X.; Zheng, X. Localization of site-specific delivery capsule in vivo with alternating electromagnetic field. In Proceedings of the 2008 World Automation Congress, Waikoloa, HI, USA, 28 September–2 October 2008. [Google Scholar]
- Song, S.; Ren, H.; Liu, W.; Hu, C. An Analytic Algorithm based Electromagnetic Localization Method. In Proceedings of the International Conference on Information and Automation, Yinchuan, China, 26–28 August 2013. [Google Scholar]
- Gao, X.; Yan, S.; Li, B. Study of a hybrid for localization of mobile target by a single fuxgate. J. Dalian Univ. Technol. 2016, 56, 292–298. [Google Scholar]














© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, X.; Yan, S.; Li, B. A Novel Method of Localization for Moving Objects with an Alternating Magnetic Field. Sensors 2017, 17, 923. https://doi.org/10.3390/s17040923
Gao X, Yan S, Li B. A Novel Method of Localization for Moving Objects with an Alternating Magnetic Field. Sensors. 2017; 17(4):923. https://doi.org/10.3390/s17040923
Chicago/Turabian StyleGao, Xiang, Shenggang Yan, and Bin Li. 2017. "A Novel Method of Localization for Moving Objects with an Alternating Magnetic Field" Sensors 17, no. 4: 923. https://doi.org/10.3390/s17040923
APA StyleGao, X., Yan, S., & Li, B. (2017). A Novel Method of Localization for Moving Objects with an Alternating Magnetic Field. Sensors, 17(4), 923. https://doi.org/10.3390/s17040923