
Compensation of PVT Variations in ToF Imagers with In-Pixel TDC




Abstract
:1. Introduction
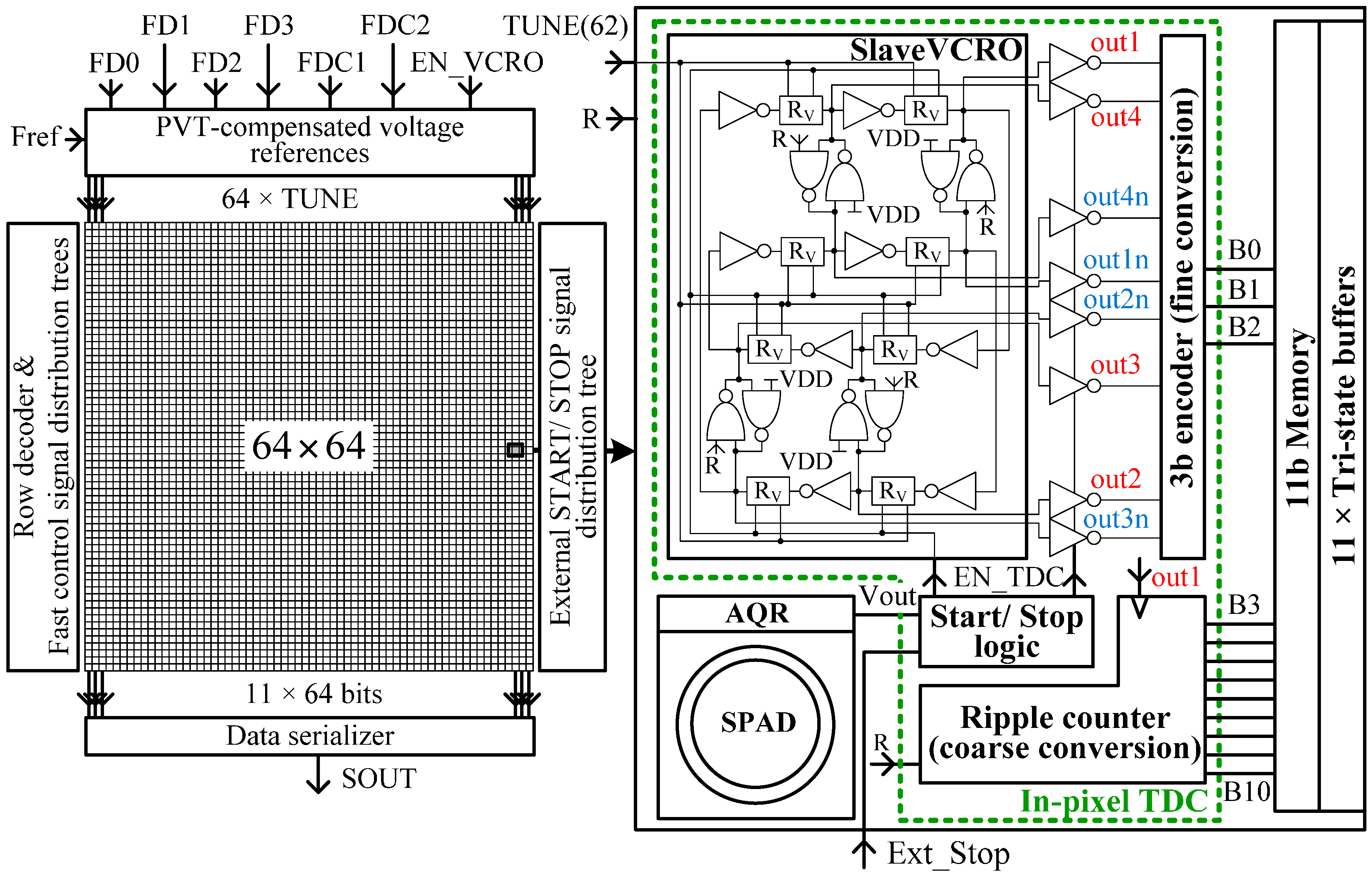
2. In-Pixel Time-to-Digital Converter
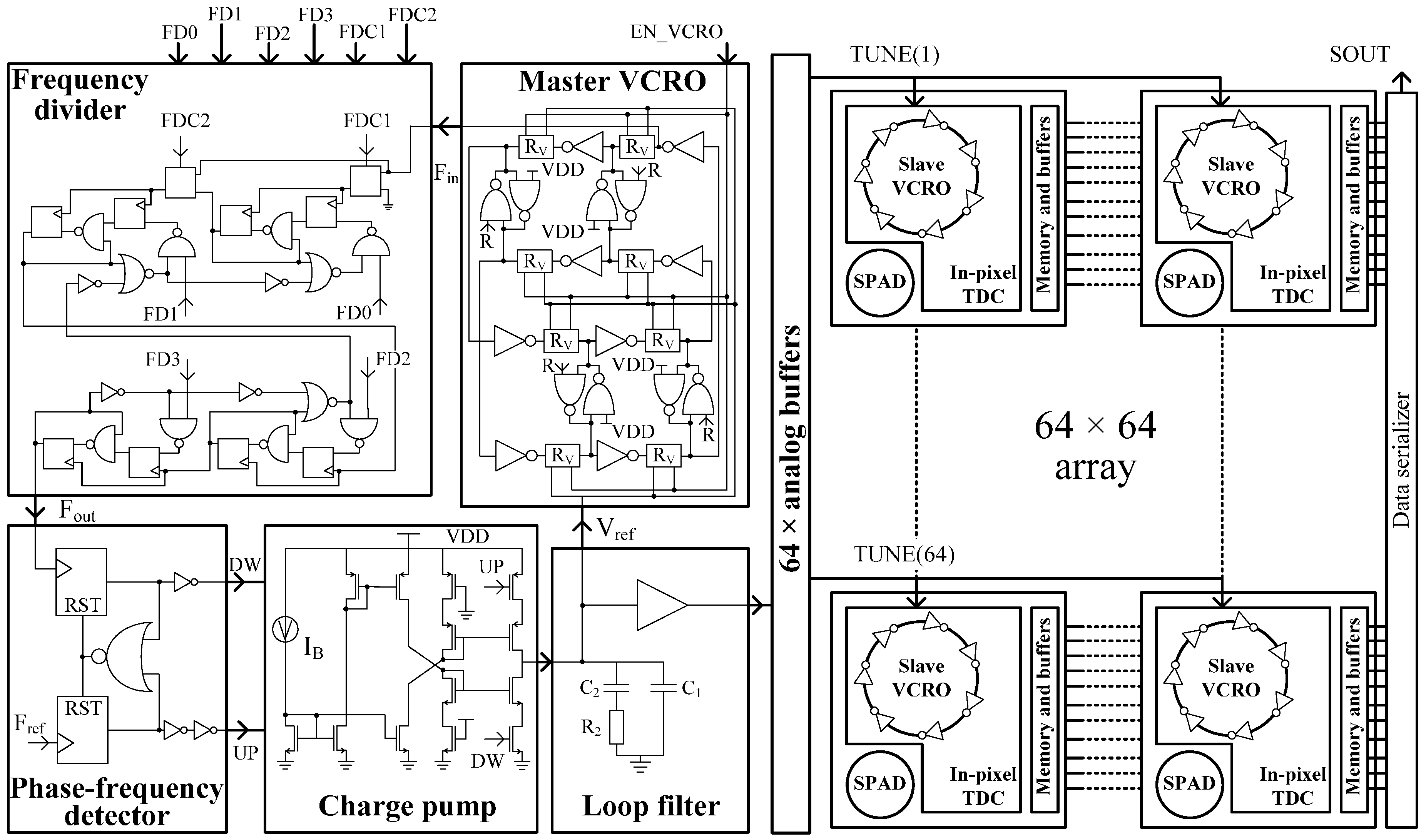
2.1. Time Bin Control Scheme
2.2. Pseudo-Differential VCRO
3. Effect of PVT Variations on the Time Bin
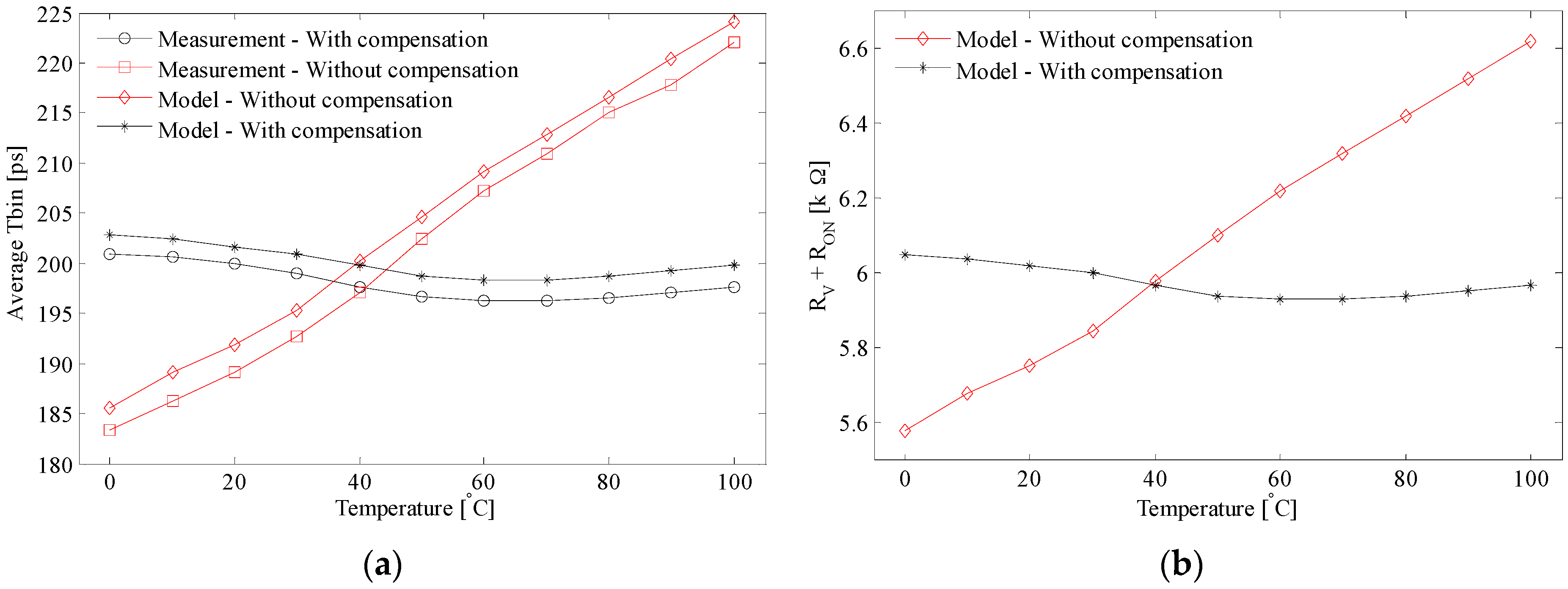
3.1. Temperature Dependence
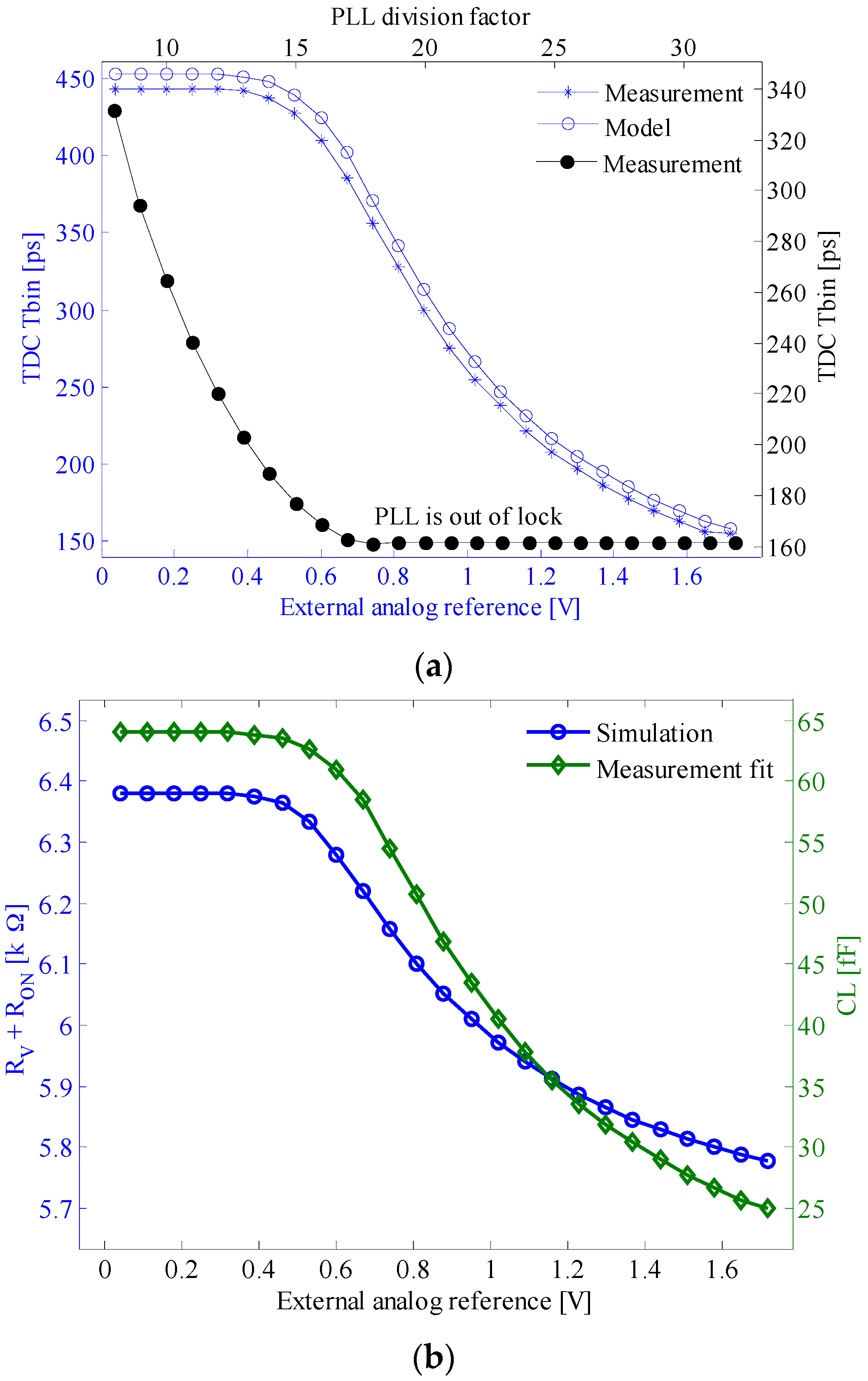
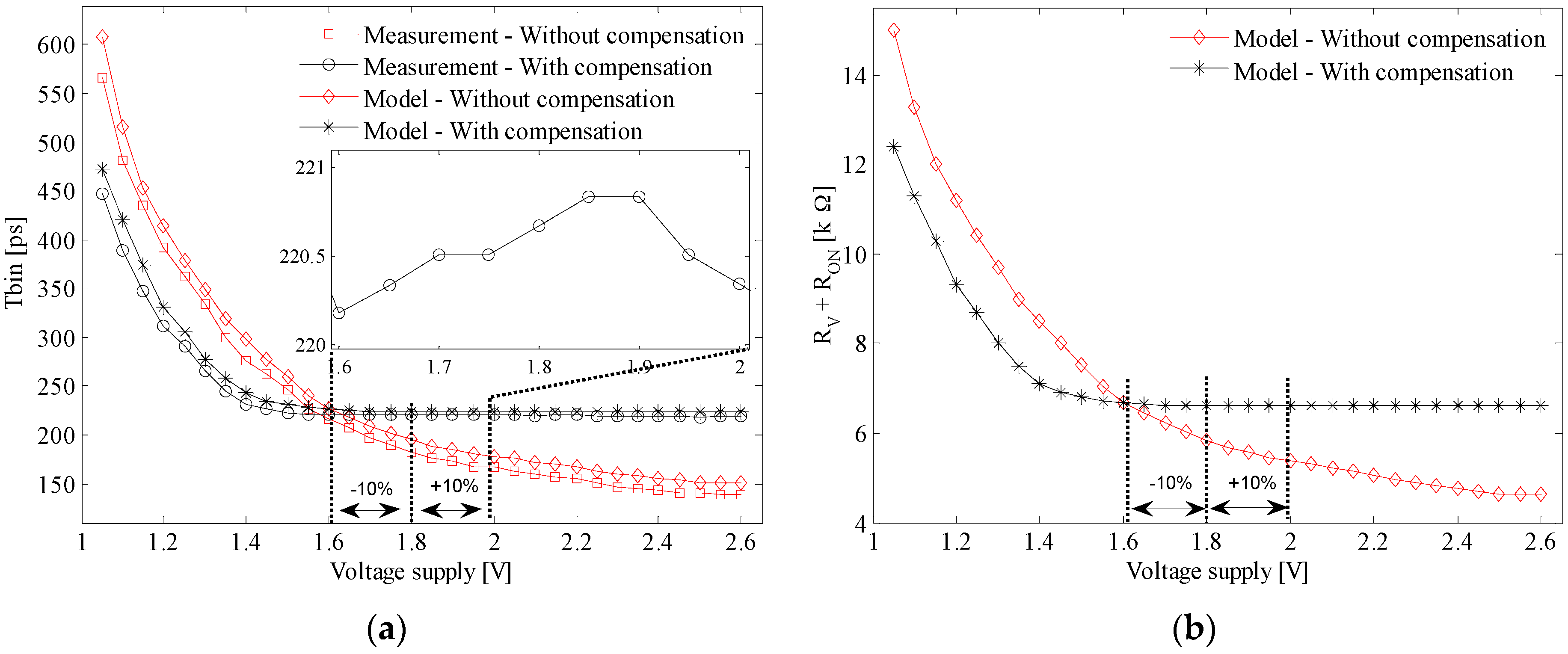
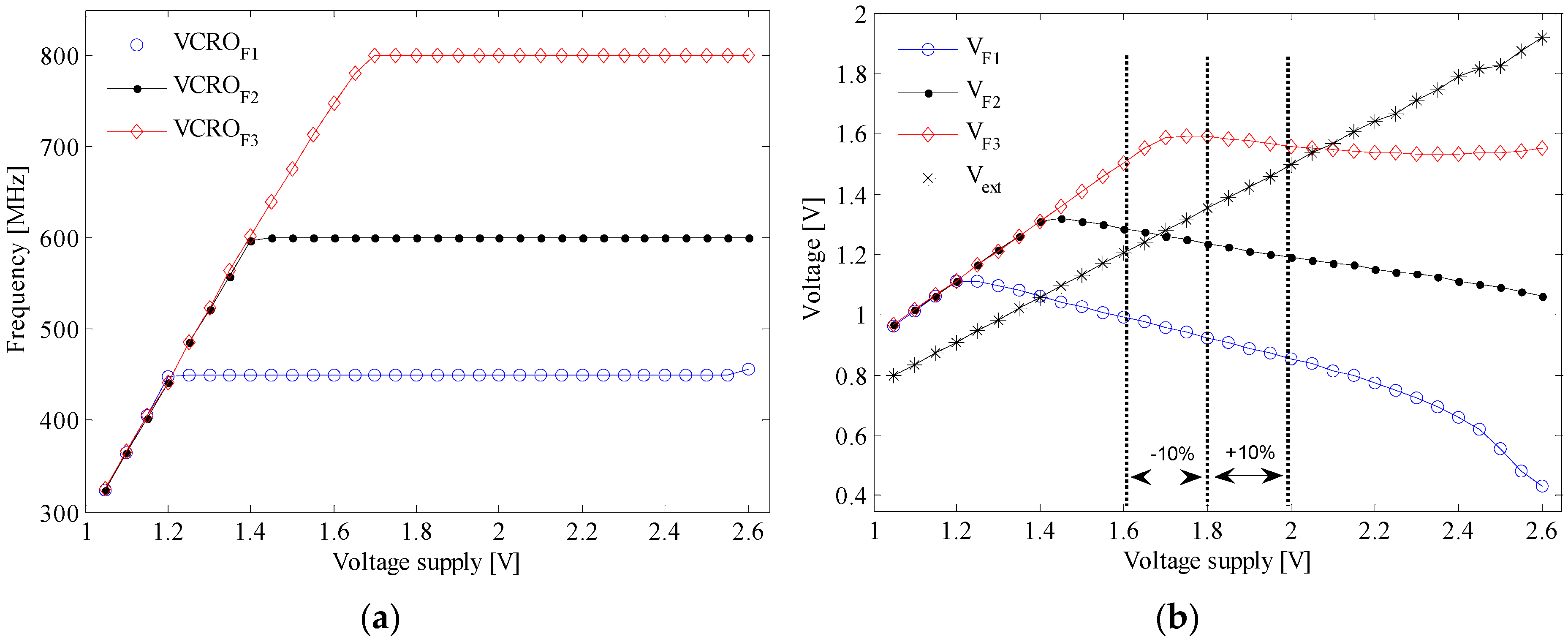
3.2. Voltage Supply Dependence
3.3. Process Parameter Variation Effect
4. Experimental Results
4.1. Time Bin of the TDC Array
4.2. Compensation of Temperature Variations
4.3. Compensation of Voltage Supply Variations
4.4. Attenuation of the Effect of the Process Parameters’ Variation
- (i)
- Pixel size of 64 × 64 μm2, fill factor of 2.7%, and in-pixel TDC area of 1740 µm2;
- (ii)
- The TDC least significant bit (LSB) variation caused by pixel-to-pixel mismatches is between 146.7 ps and 155.6 ps. It means a standard deviation of 32 codes at full scale. The RMS DNL and INL computed across the array are less than 0.35 LSB and 1.5 LSB [18];
- (iii)
- The single shot precision at 10% and 90% of the full range has a standard deviation of 0.79 and 13.88 codes, respectively;
- (iv)
- The TDC average power consumption of 9 μW has been obtained from post-layout worst-case simulations. In order to have a fair comparison with reference [10], we have normalized it per 10 ns conversion time and 500 k conversions per second;
- (v)
- As has been verified by the experiments, the global compensation scheme considerably reduces the spreading of the TDCs time bin from: (a) 20% down to 2.4% while the temperature ranges from 0 °C to 100 °C; (b) 27% down to 0.27%, when the voltage supply changes within ±10% from the nominal value of 1.8 V; (c) 5.2 ps to 2 ps standard deviation due to process variation, with an average value of 198.2 ps and 203.8 ps. 30 samples have been measured during this experiment.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gersbach, M.; Maruyama, Y.; Trimananda, R.; Fishburn, M.W.; Stoppa, D.; Richardson, J.A.; Walker, R.; Henderson, R.; Charbon, E.A. Time-resolved, low-noise single-photon image sensor fabricated in deep-submicron CMOS technology. J. Solid State Circuits 2012, 47, 1394–1407. [Google Scholar] [CrossRef]
- Niclass, C.; Rochas, A.; Besse, P.-A.; Charbon, E. Toward a 3-D camera based on single photon avalanche diodes. J. Sel. Top. Quantum Electron. 2004, 10, 796–802. [Google Scholar] [CrossRef]
- Durini, D.; Brockherde, W.; Ulfig, W.; Hosticka, B.J. Time-of-Flight 3-D Imaging Pixel Structures in Standard CMOS Processes. J. Solid State Circuits 2008, 43, 1594–1602. [Google Scholar] [CrossRef]
- Bronzi, D.; Villa, F.; Tisa, S.; Tosi, A.; Zappa, F.; Durini, D.; Weyers, S.; Brockherde, W. 100.000 frames/s 64 × 32 single-photon detector array for 2-D imaging and 3-D ranging. J. Sel. Top. Quantum Electron. 2014, 20, 3804310. [Google Scholar] [CrossRef]
- Saha, G.B. Performance characteristics of PET scanners. In Basics of PET Imaging; Springer Science + Business Media, LLC: New York, NY, USA, 2010. [Google Scholar]
- Braga, L.H.C.; Gasparini, L.; Grant, L.; Henderson, R.K.; Massari, N.; Perenzoni, M.; Stoppa, D.; Walker, R. A fully digital 8 × 16 SiPM array for PET applications with per-pixel TDCs and real-time energy output. J. Solid State Circuits 2014, 49, 301–314. [Google Scholar] [CrossRef]
- Poland, S.P.; Coelho, S.; Krstajić, N.; Tyndall, D.; Walker, R.; Monypenny, J.; Li, D.D.-U.; Henderson, R.; Ameer-Beg, S. Development of a fast TCSPC FLIM-FRET imaging system. In Proceedings of the SPIE 8588, San Francisco, CA, USA, 2 February 2013. [Google Scholar]
- Villa, F.; Markovic, B.; Bellisai, S.; Bronzi, D.; Tosi, A.; Zappa, F.; Tisa, S.; Durini, D.; Weyers, S.; Paschen, U.; Brockherde, W. SPAD smart pixel for time-of-flight and time-correlated single-photon counting measurements. Photonics J. 2012, 4, 795–804. [Google Scholar] [CrossRef]
- Villa, F.; Lussana, R.; Bronzi, D.; Tisa, S.; Tosi, A.; Zappa, F.; Dalla Mora, A.; Contini, D.; Durini, D.; Weyers, S.; Brockherde, W. CMOS imager with 1024 SPADs and TDCs for single-photon timing and 3-D time-of-flight. J. Sel. Top. Quantum Electron. 2014, 20, 795–804. [Google Scholar] [CrossRef]
- Richardson, J.; Walker, R.; Grant, L.; Stoppa, D.; Borghetti, F.; Charbon, E.; Gersbach, M.; Henderson, R.K. A 32 × 32 50 ps resolution 10 bit time to digital converter array in 130 nm CMOS for time correlated imaging. In Proceedings of the Custom Integrated Circuits Conference, San Jose, CA, USA, 13–16 September 2009. [Google Scholar]
- Vornicu, I.; Carmona-Galán, R.; Rodríguez-Vázquez, Á. A SPAD plus TDC array for 145 ps-accuracy ToF measurement. In Proceedings of the IS&T/SPIE Electronic Imaging: Image Sensors and Imaging Systems, San Francisco, CA, USA, 8 February 2015. [Google Scholar]
- Vornicu, I.; Carmona-Galán, R.; Rodríguez-Vázquez, Á. A CMOS imager for time-of-flight and photon counting based on single photon avalanche diodes and in-pixel time-to-digital converters. Sci. Technol. 2014, 17, 353–371. [Google Scholar]
- Vornicu, I.; Carmona-Galán, R.; Rodríguez-Vázquez, Á. In-pixel voltage-controlled ring-oscillator for phase interpolation in ToF image sensors. In Proceedings of the International Symposium on Circuits and Systems, Lisbon, Portugal, 24–27 May 2015. [Google Scholar]
- Veerappan, C.; Richardson, J.; Walker, R.; Li, D.-U.; Fishburn, M.W.; Maruyama, Y.; Stoppa, D.; Borghetti, F.; Gersbach, M.; Henderson, R.K.; et al. A 160 × 128 single photon image sensor with on-pixel 55 ps 10b time-to-digital-converter. In Proceedings of the International Solid-State Circuits Conference, San Francisco, CA, USA, 20–24 February 2011. [Google Scholar]
- Gupta, N. Voltage-controlled ring oscillator for low phase noise application. Int. J. Comput. Appl. 2011, 14, 23–27. [Google Scholar] [CrossRef]
- Lin, Z.; Huang, K.; Chen, J.; Liao, M. A CMOS voltage-controlled oscillator with temperature compensation. In Proceedings of the Asian Pacific Conference on ASICs, Cheju, Korea, 28–30 August 2000. [Google Scholar]
- Pelgrom, M.J.M.; Duinmaijer, A.C.J.; Welbers, A.P.G. Matching properties of MOS transistors. J. Solid State Circuits 1989, 24, 1433–1439. [Google Scholar] [CrossRef]
- Vornicu, I.; Carmona-Galán, R.; Rodríguez-Vázquez, Á. Time interval generator with 8 ps resolution and wide range for large TDC array characterization. Analog Integr. Circuits Signal Process. 2016, 87, 181–189. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Prediction | Simulation | Measurement NC/C * |
|---|---|---|---|
| 647.4 MHz | 647.4 MHz | 630.7 MHz/613.3 MHz | |
| 51.4 MHz | 42.28 MHz | 16.5 MHz/6 MHz | |
| 193 ps | 193 ps | 198.2 ps/203.8 ps | |
| 15.3 ps | 12.6 ps | 5.2 ps/2 ps |
| Par. | [pm] | [m2/Vs] | [m2/Vs] | [mV] | [mV] | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| i = MN, MN1, MN2 [nm] | i = MP, MP1, MP2 [nm] | i = MN [nm] | i = MN1 [nm] | i = MN2 [nm] | i = MP1 [nm] | i = MP, MP2 [nm] | ||||||
| μ | 4200 | 0.0314 | 0.0114 | 307.3 | 456 | 169 | 178 | 1200 | 800 | 250 | 2399 | 999.7 |
| σ | 28.3 | 0.000315 | 0.00011 | 5.3 | 6.5 | 5.7 | 2.9 | 6.2 | 6.2 | 6.2 | 5.9 | 5.9 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vornicu, I.; Carmona-Galán, R.; Rodríguez-Vázquez, Á. Compensation of PVT Variations in ToF Imagers with In-Pixel TDC. Sensors 2017, 17, 1072. https://doi.org/10.3390/s17051072
Vornicu I, Carmona-Galán R, Rodríguez-Vázquez Á. Compensation of PVT Variations in ToF Imagers with In-Pixel TDC. Sensors. 2017; 17(5):1072. https://doi.org/10.3390/s17051072
Chicago/Turabian StyleVornicu, Ion, Ricardo Carmona-Galán, and Ángel Rodríguez-Vázquez. 2017. "Compensation of PVT Variations in ToF Imagers with In-Pixel TDC" Sensors 17, no. 5: 1072. https://doi.org/10.3390/s17051072
APA StyleVornicu, I., Carmona-Galán, R., & Rodríguez-Vázquez, Á. (2017). Compensation of PVT Variations in ToF Imagers with In-Pixel TDC. Sensors, 17(5), 1072. https://doi.org/10.3390/s17051072