
MERITXELL: The Multifrequency Experimental Radiometer with Interference Tracking for Experiments over Land and Littoral—Instrument Description, Calibration and Performance


Abstract
:1. Introduction
1.1. Multiband Microwave Radiometers
- The Helsinki University of Technology RADiometer (HUTRAD) for remote sensing is an airborne radiometer which includes a non-imaging subsystem that operates at six frequencies between 6.8 and 94 GHz, with vertically and horizontally polarized channels at each frequency [3].
- The Polarimetric Scanning Radiometer (PSR) is an airborne instrument which operates at 10.7, 18.7, 37, and 89 GHz, and measures the first three modified Stokes’ parameters. It has two-axis scanning capability and provides polarimetric data for microwave emission studies of both ocean and land surfaces, as well as atmospheric clouds and precipitation [4].
- The Special Sensor Microwave Imager/Sounder (SSMI/S) is a spaceborne mission which includes a 24-channel single conically scanning radiometer, and represents the most complex operational satellite passive microwave imager/sounding sensor ever flown with capabilities to profile the mesosphere. The receiver subsystem accepts the energy from the six antenna feeds and provides amplification and filtering to the 24 output channel located at the 19, 22, 37, 50–60, 91, 150, and 183 GHz frequency bands [5].
- The Advanced Microwave Scanning Radiometer for the Earth Observing System (AMSR-E) is a six-frequency dual-polarized total-power passive microwave spaceborne radiometer that observes water-related geophysical parameters supporting global change science and monitoring efforts. The supported frequency bands include 6.925, 10.65, 18.7, 23.8, 36.5, and 89.0 GHz [6].
1.2. The Problem of Radio-Frequency Interference
1.3. MERITXELL Instrument
2. Instrument Design
- to include all passive radiometric bands up to 100 GHz used for Earth observation from a satellite (this excludes the 50–60 GHz bands ([1], Chapter 1)).
- to be built using a flexible back-end system to allow custom signal processing techniques for RFI detection, localization and mitigation, and data fusion algorithms.
- to include several optical sensors such as a thermal infrared and a multispectral camera with visible and near-infrared bands. These optical sensors are able to retrieve the complementary measurements used by data fusion algorithms.
- to include a GNSS reflectometer to retrieve GNSS-R data for data fusion algorithms.
- to be mounted in a ground-based mobile platform that allows to transport it, and to point it to any desired position in azimuth and elevation.
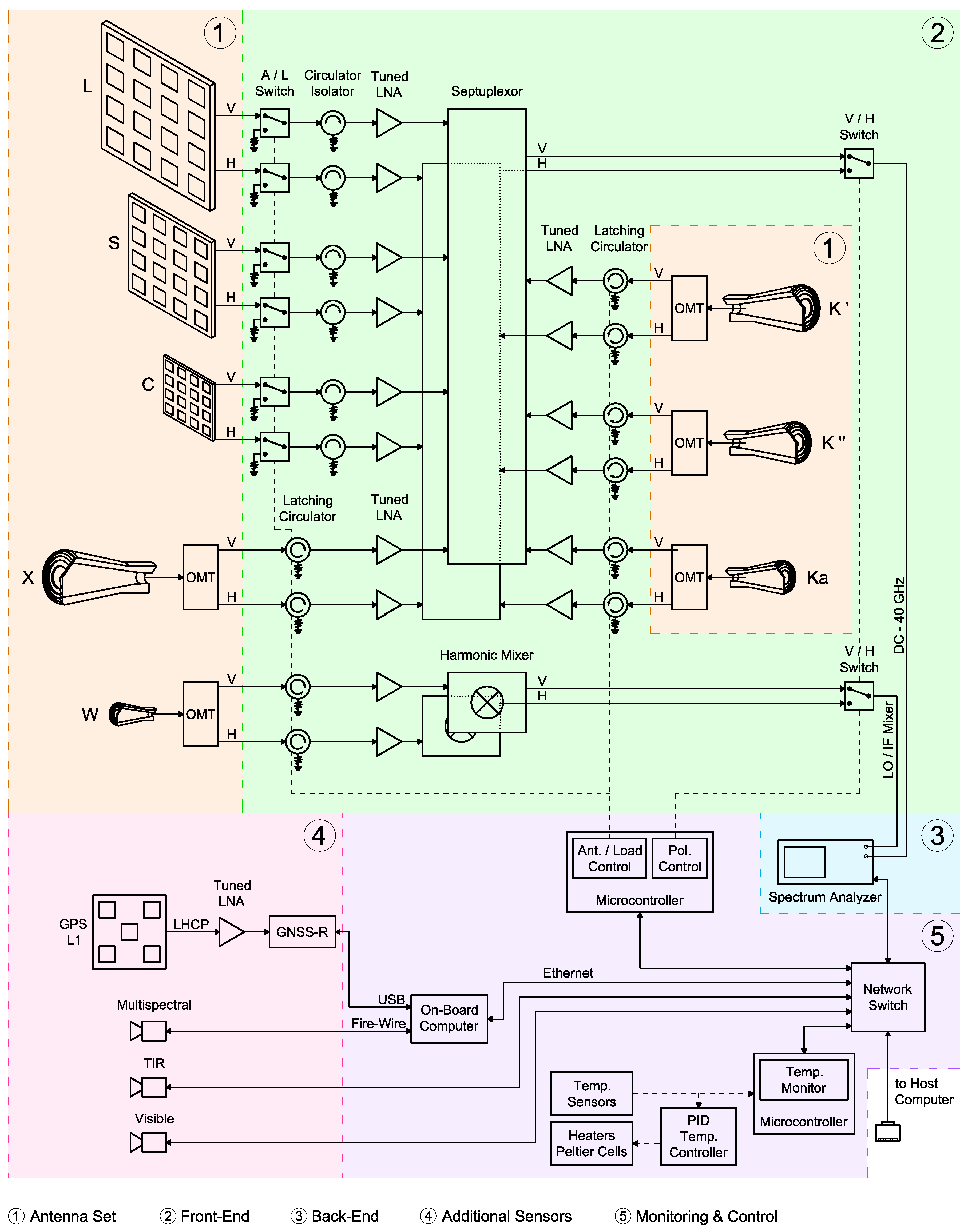
2.1. Radiometer Assembly
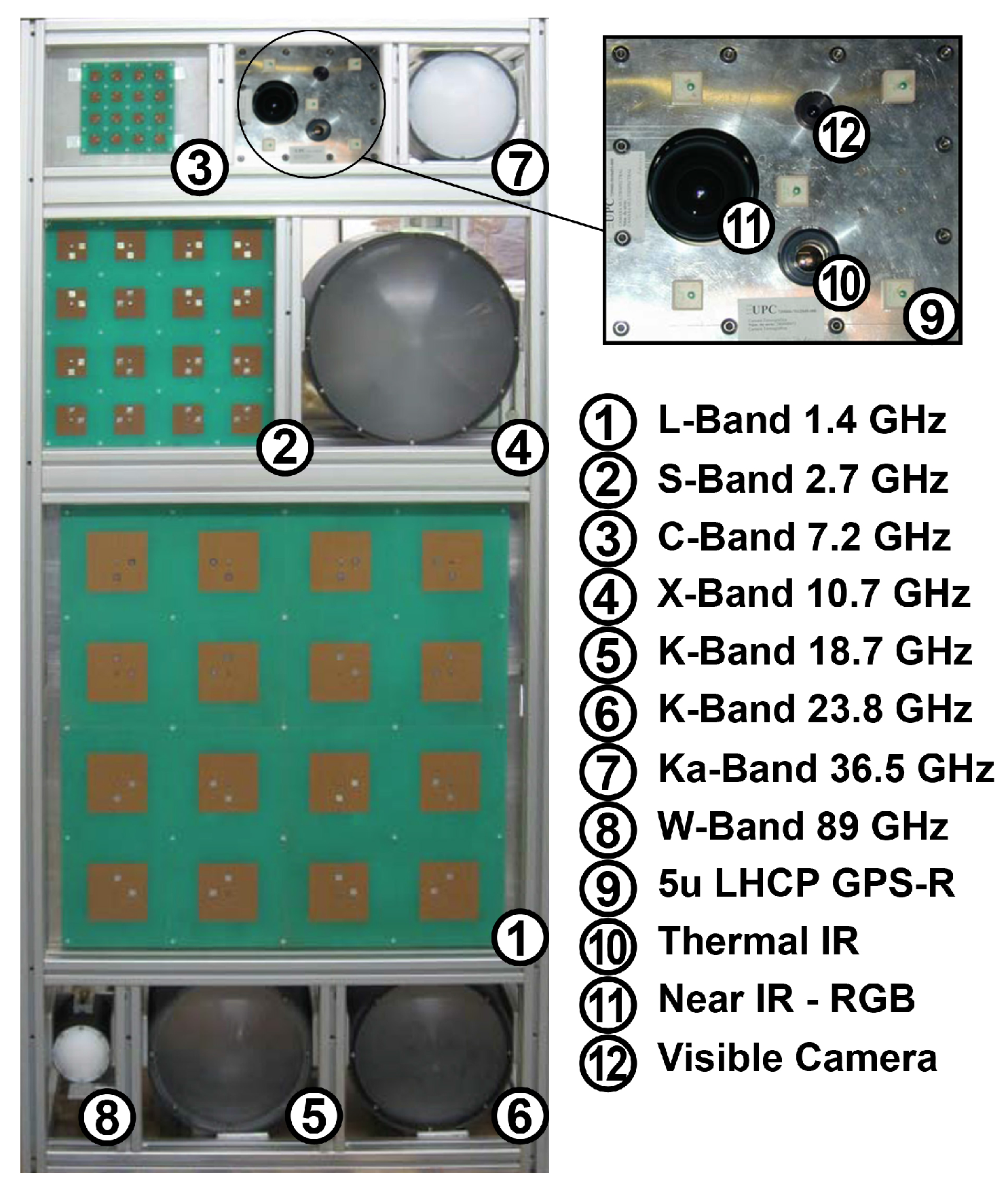
2.1.1. Antenna Set
2.1.2. Front-End Stage
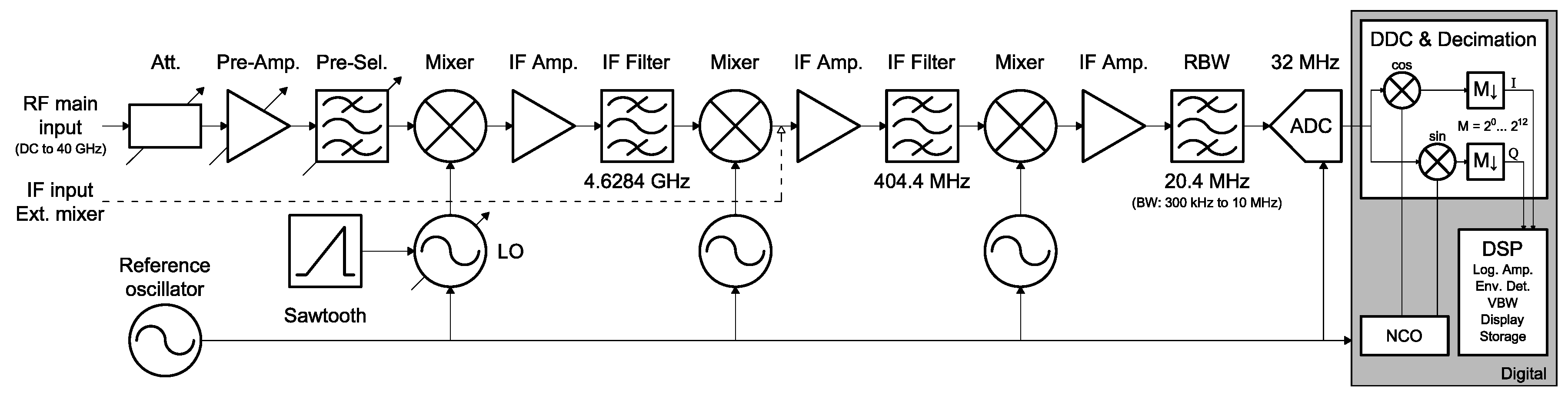
2.1.3. Back-End Stage
2.2. Additional Sensors
2.2.1. GNSS Reflectometer
2.2.2. Thermal Infrared Camera
2.2.3. Multispectral Camera
2.2.4. Video Camera
2.3. Monitoring and Control Systems
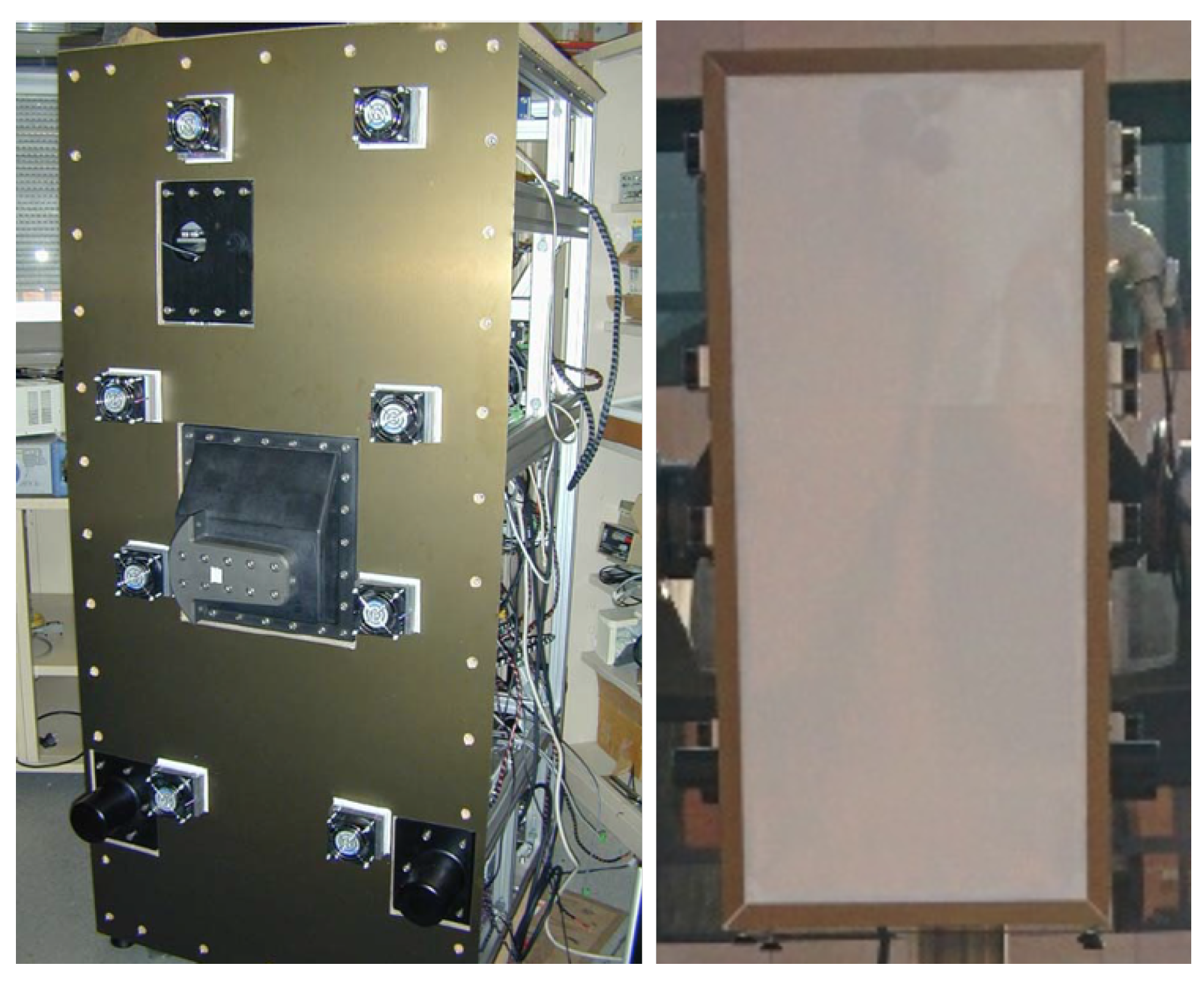
2.3.1. Enclosure
2.3.2. Thermal Stabilization
2.3.3. Thermal Monitoring
2.3.4. Switch Control
2.4. Mobile Unit
2.4.1. Telescopic Robotic Arm
2.4.2. Positioning Control
3. Instrument Control
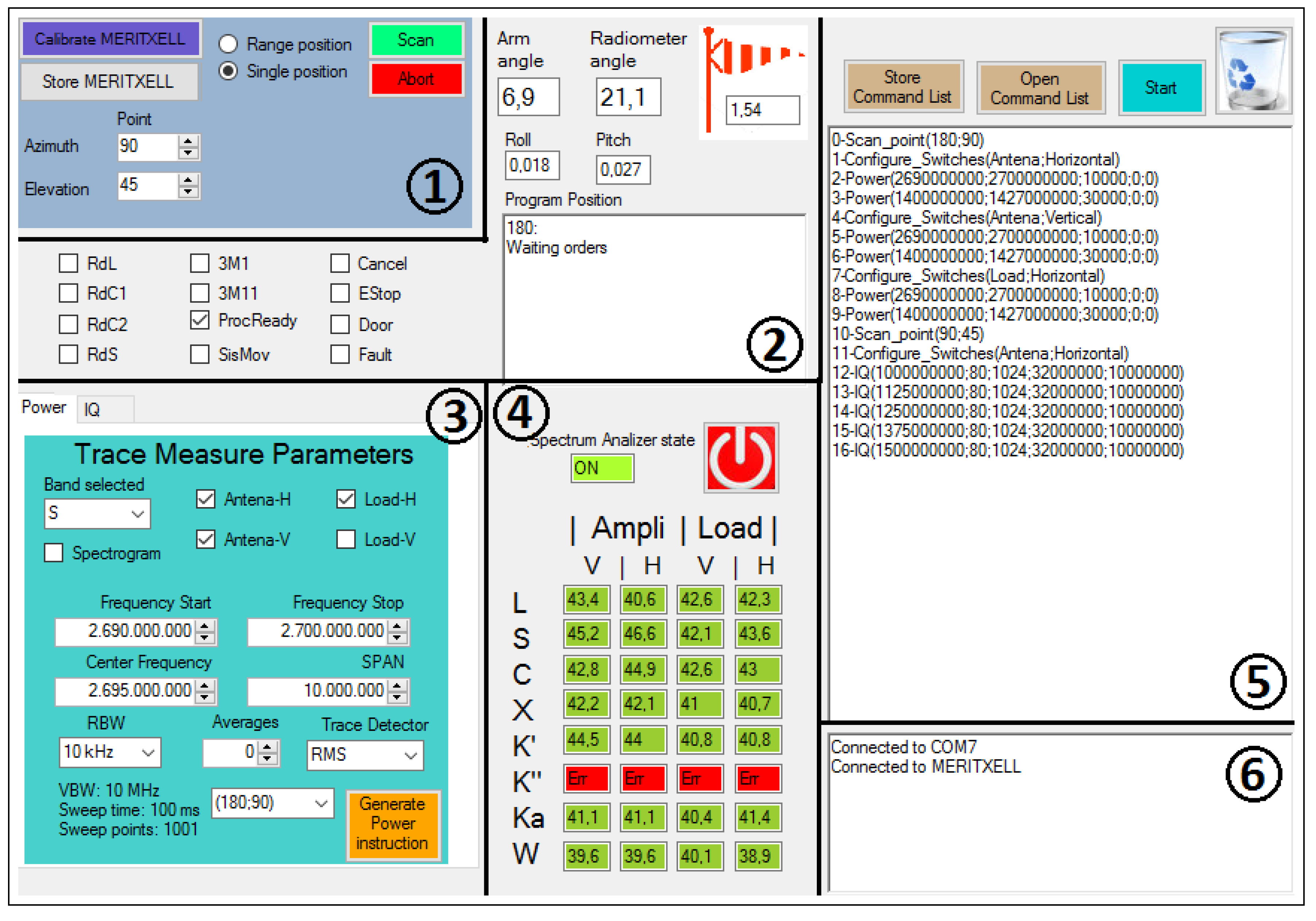
3.1. Graphical User Interface
3.2. Back-End Configuration
3.2.1. Power Measurements
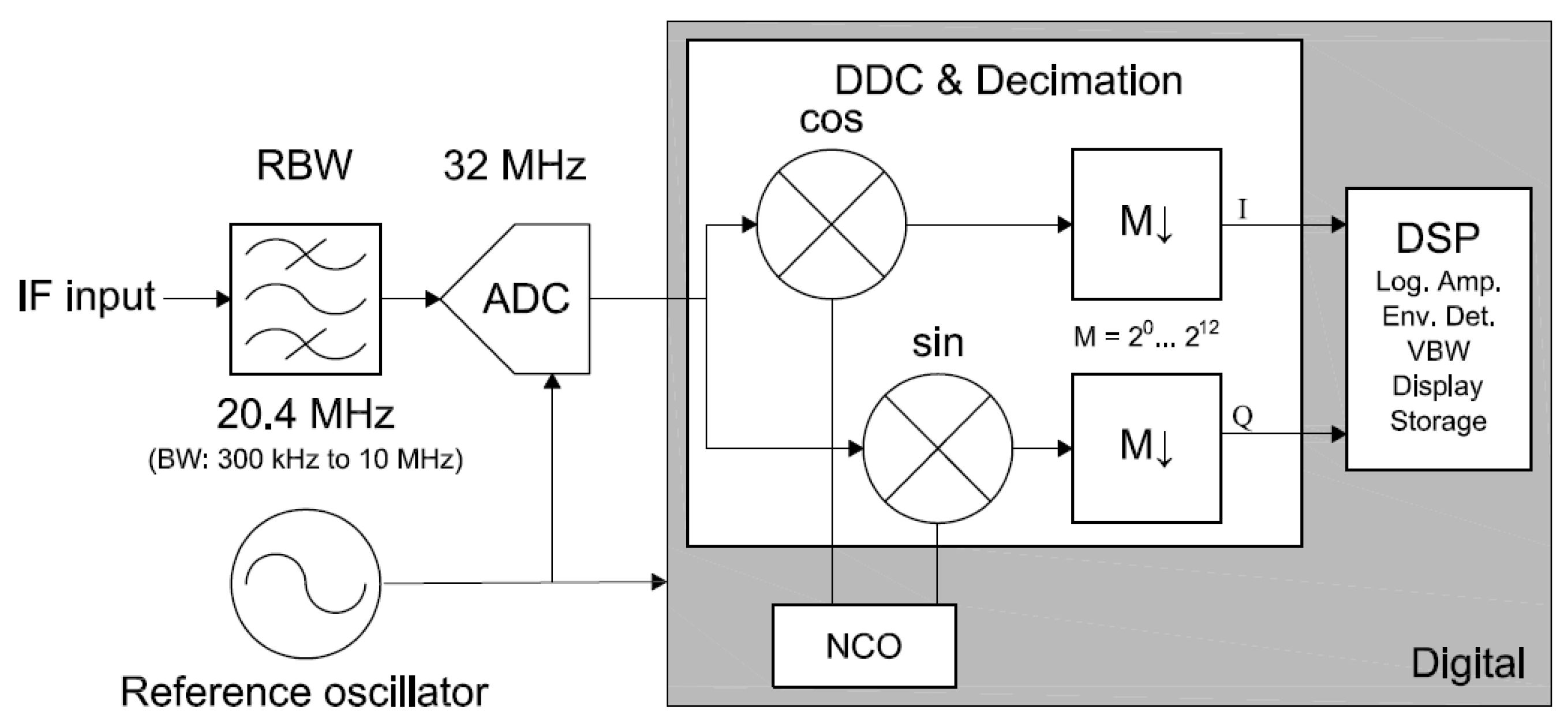
3.2.2. I/Q Measurements
- The central frequency configures the frequency of the local oscillator (external mixer in the W-band), which is fixed in this mode.
- The reference level determines the maximum amplitude (or power) of the dynamic range of the ADC.
- The ADC filter sets the bandwidth of the anti-aliasing filter before the ADC. It is equivalent to the RBW, but its possible values are 10 MHz, 3 MHz, 1 MHz, and 300 kHz.
- The sample rate sets the decimation value after the digital downconversion, and then the output sample rate. The decimation value increases in powers of 2 from 1 to 2048.
- The number of samples determines the size of each data acquisition. The available buffer can store is up to 128 k samples.
4. Calibration and Characterization
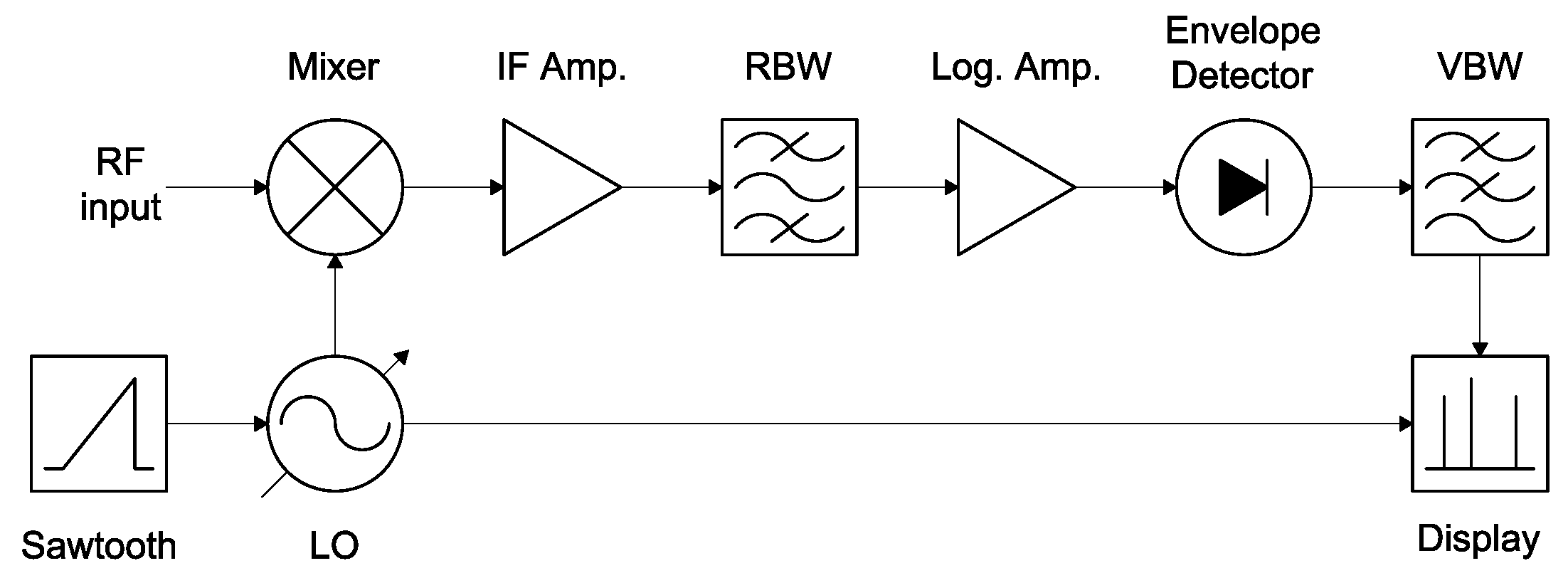
4.1. Measuring Principle
4.2. Calibration Procedure
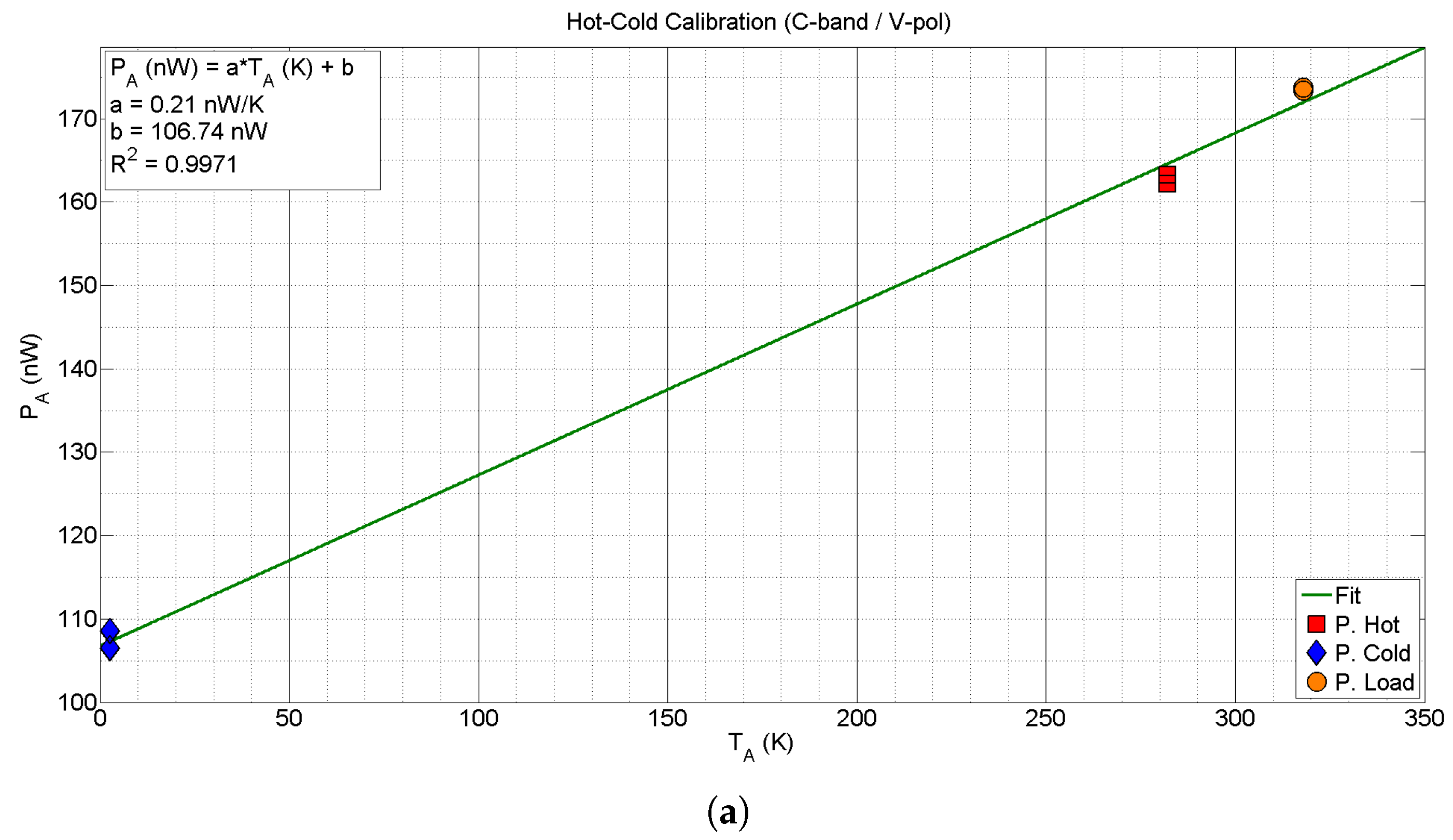
4.2.1. Hot-Cold Calibration
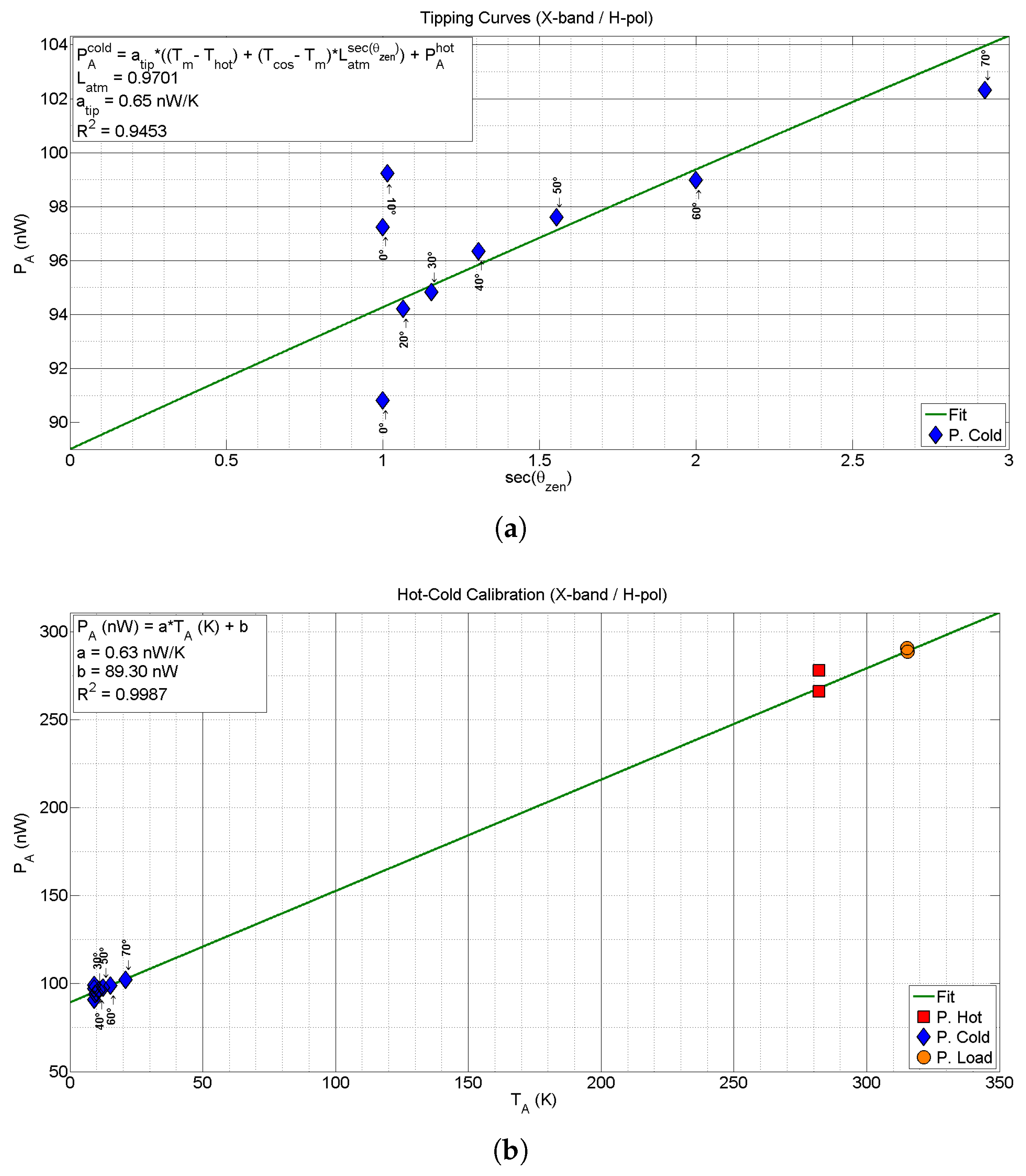
4.2.2. Tipping Curves
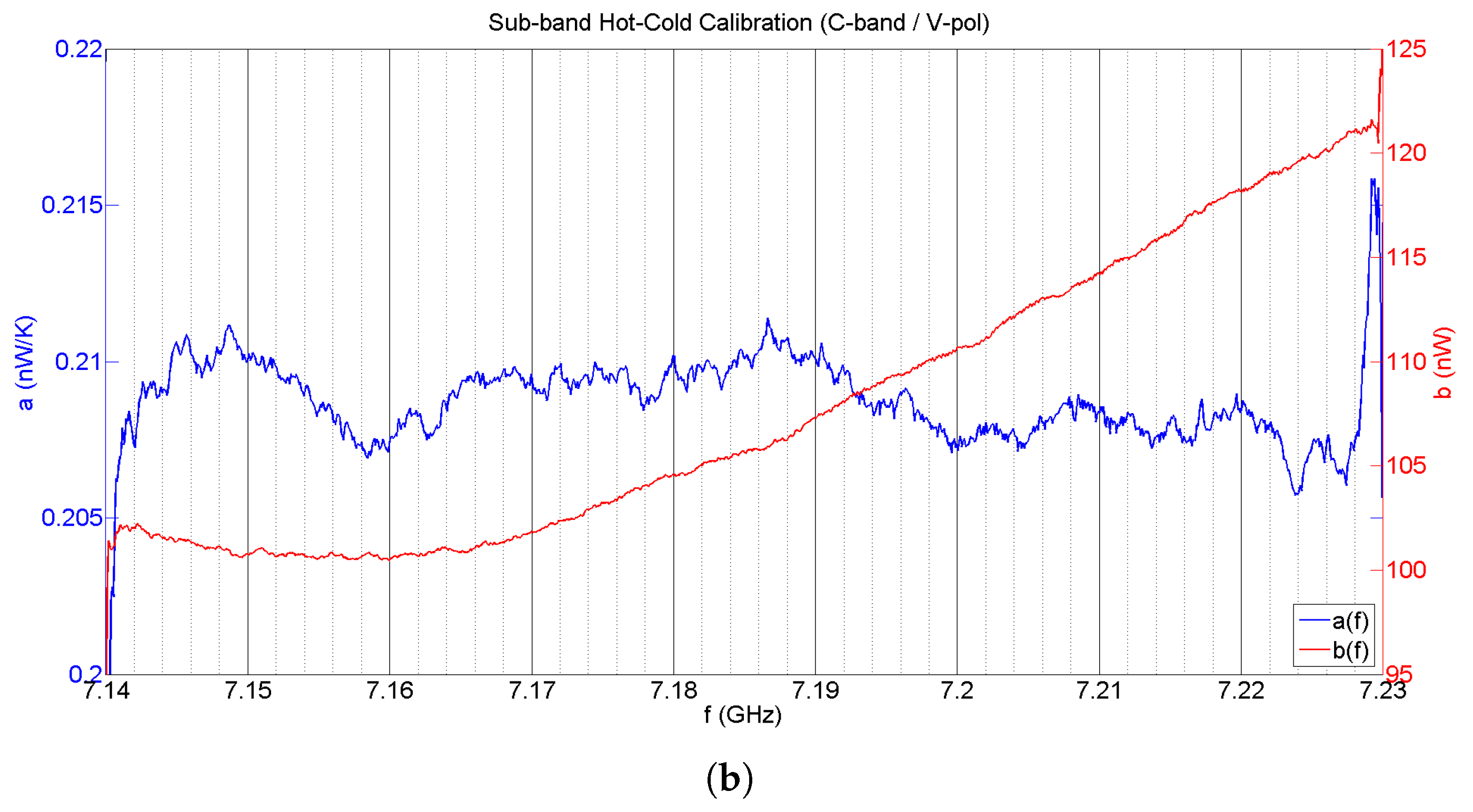
4.3. Calibration Examples
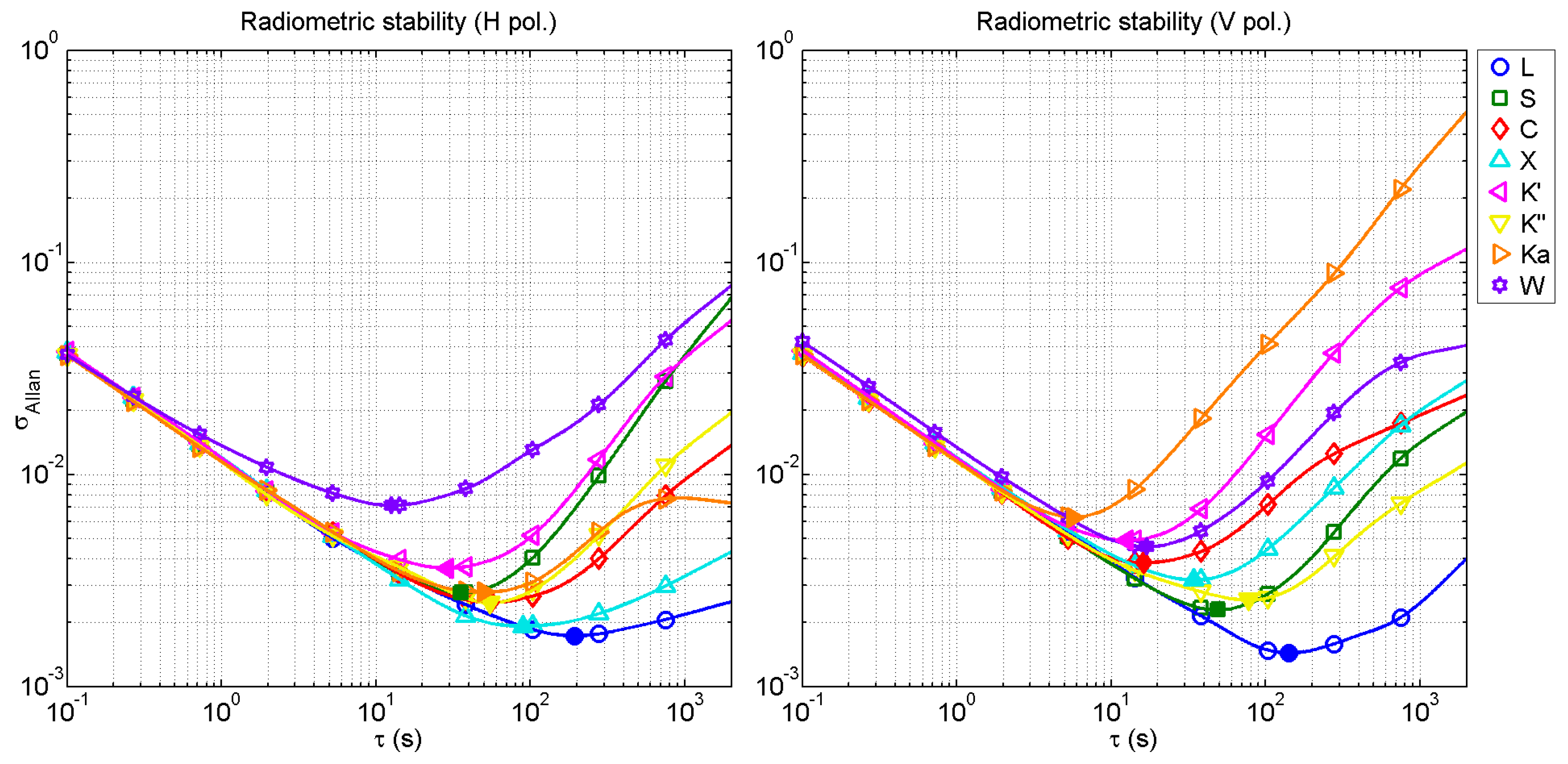
4.4. Radiometric Stability
5. RFI Measurements
5.1. RFI Related Capabilities
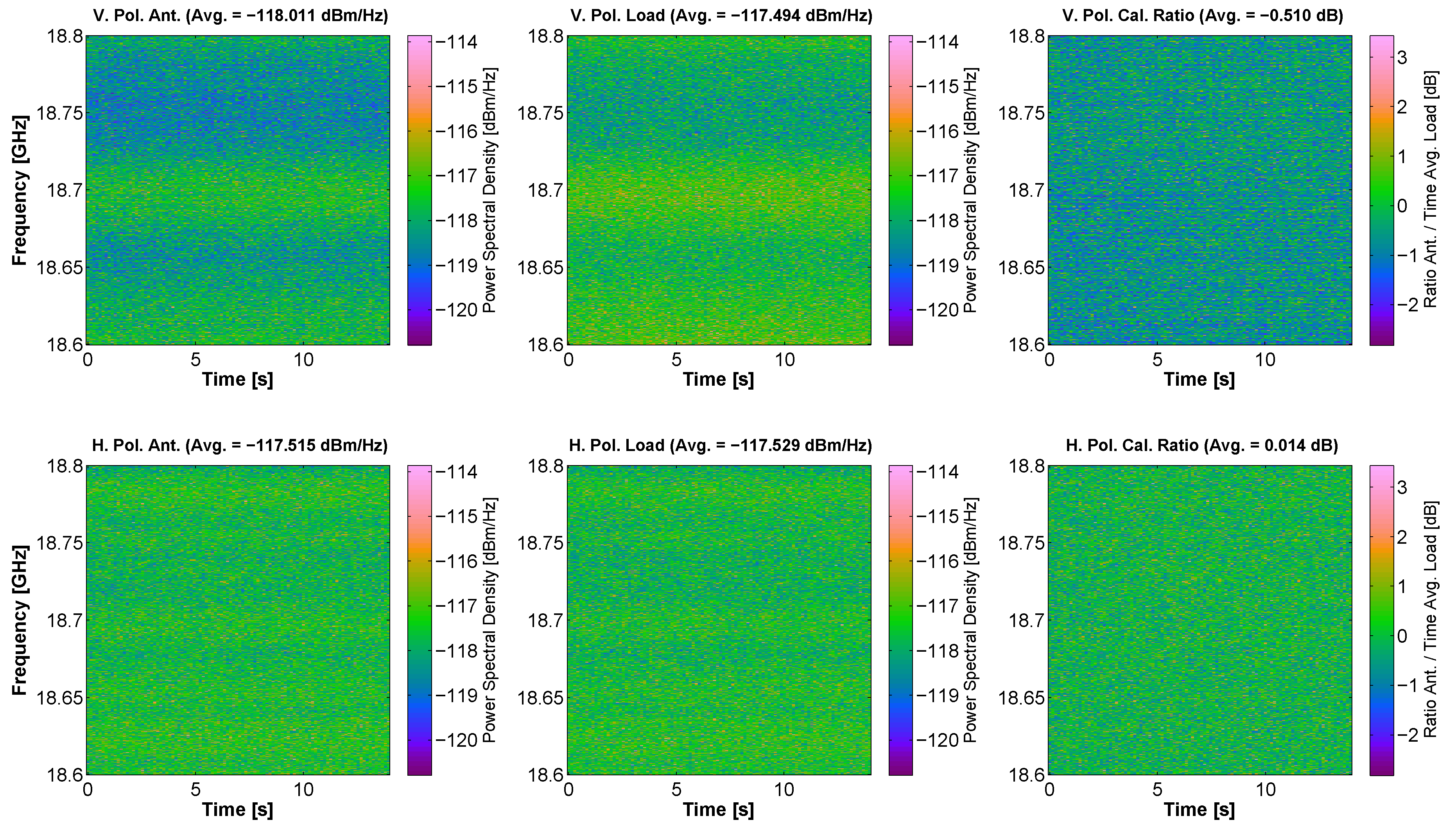
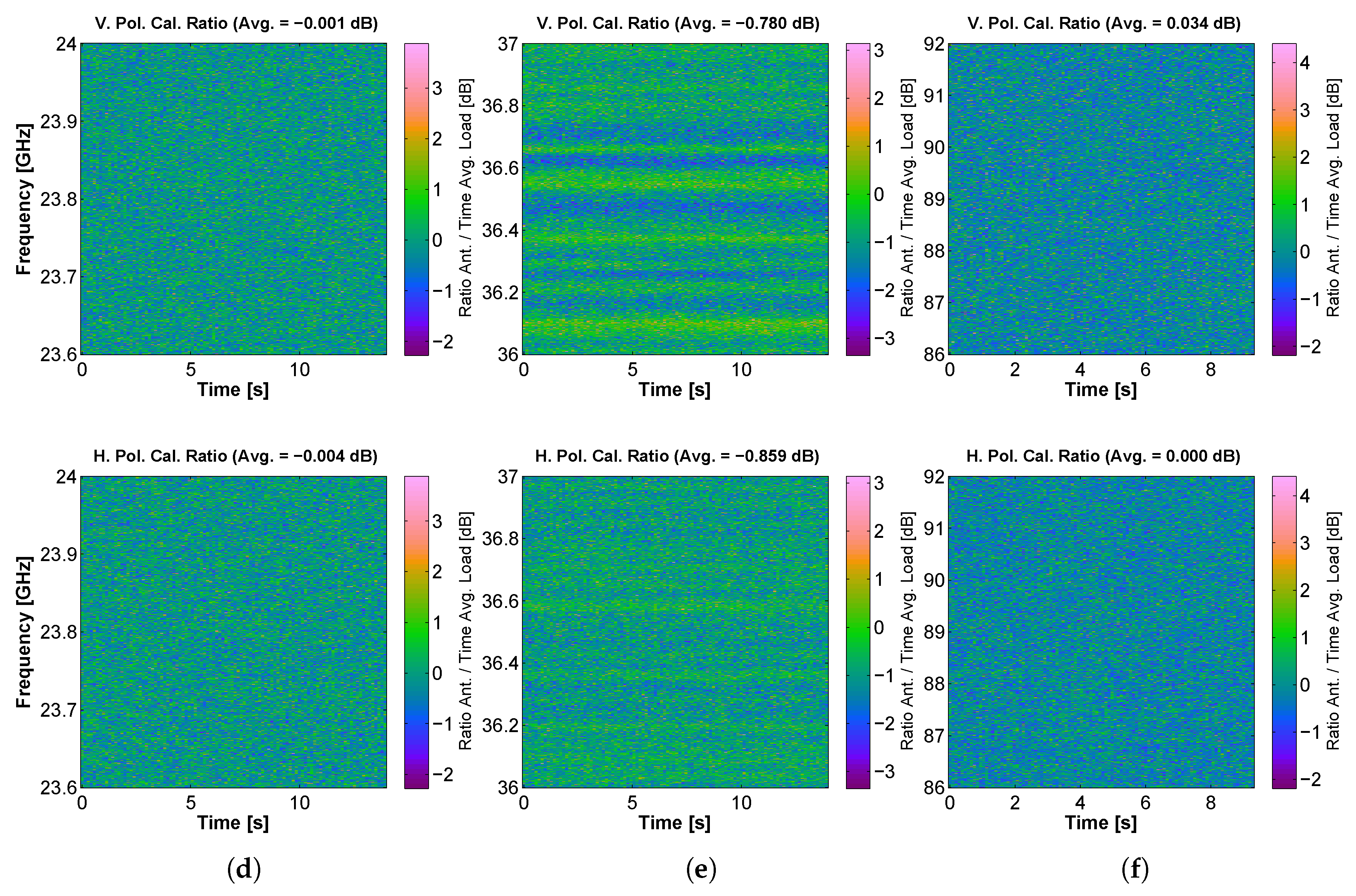
5.2. Receiving Chain Compensation
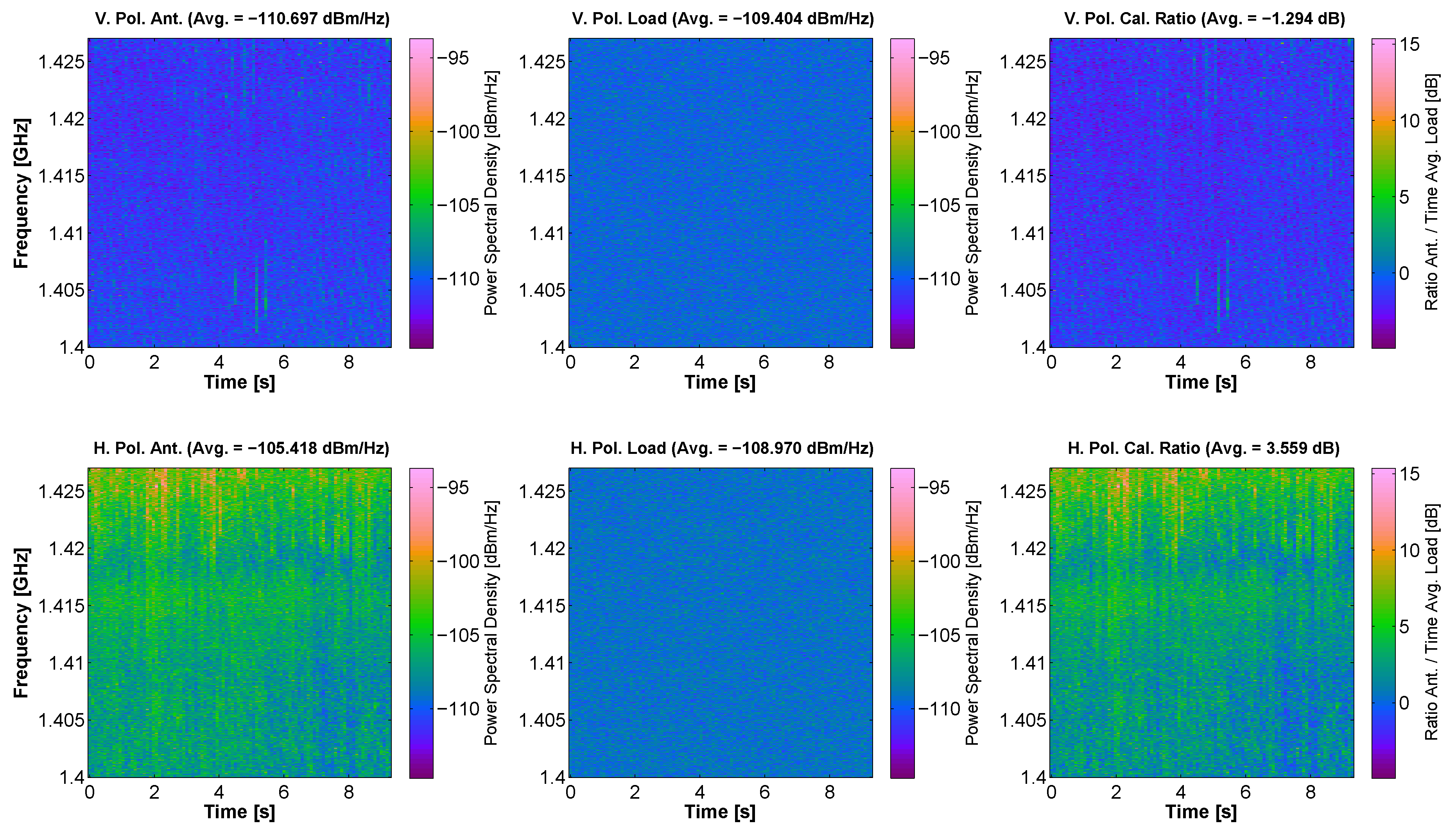
5.3. RFI Examples at MWR Bands
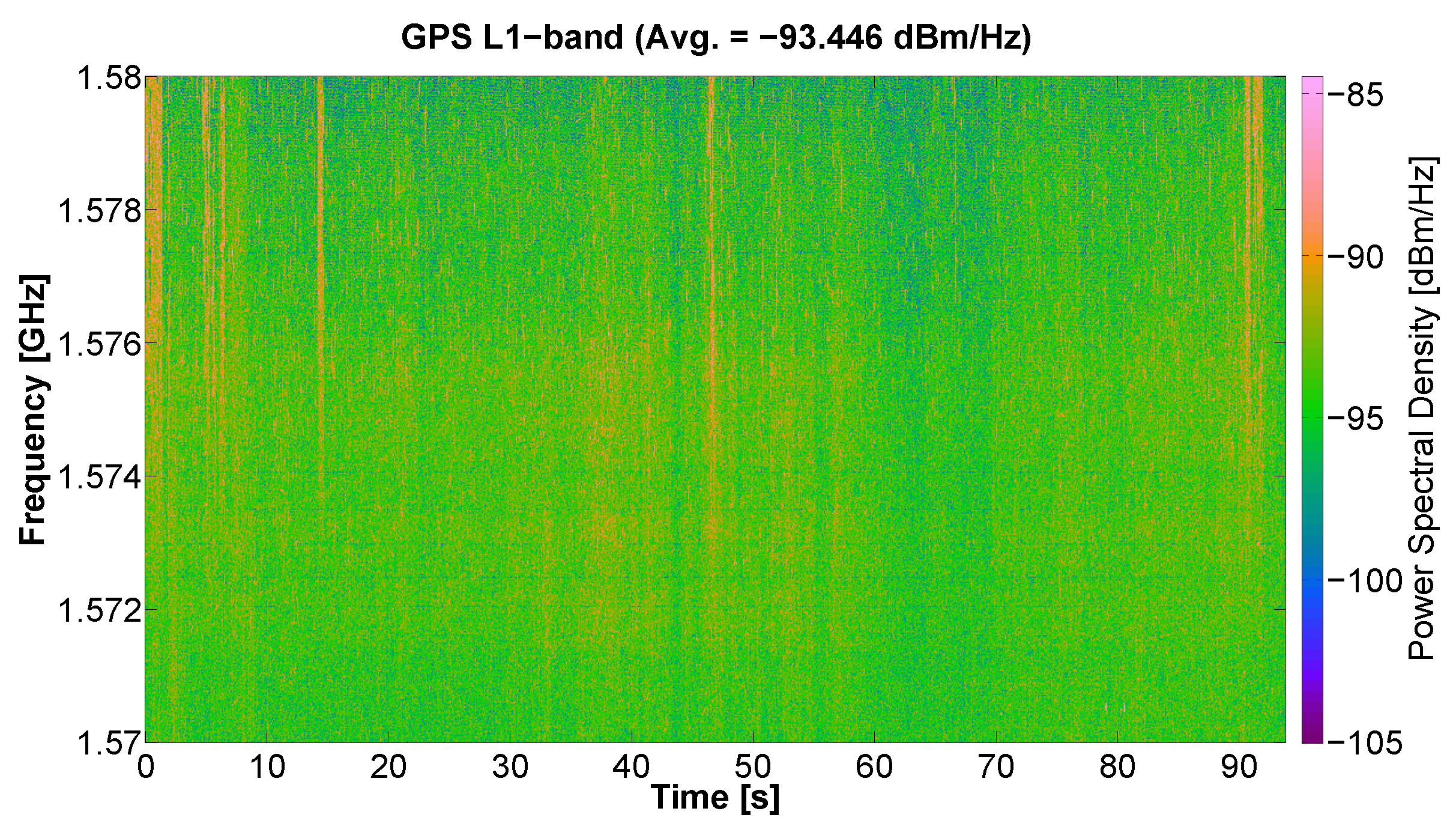
5.4. RFI Example at GPS Bands
6. Summary and Conclusions
Supplementary Materials
Supplementary File 1Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ADC | Analog-to-Digital Converter |
| AMSR-E | Advanced Microwave Scanning Radiometer for the Earth Observing System |
| CIR | Color-Infrared |
| CPI | Cross-Polarization Isolation |
| FOW | Field-Of-View |
| GNSS | Global Navigation Satellite Systems |
| GNSS-R | Global Navigation Satellite Systems - Reflectometry |
| GPS | Global Positioning System |
| GUI | Graphical User Interface |
| HUTRAD | Helsinki University of Technology RADiometer |
| I/Q | In-phase and Quadrature |
| IF | Intermediate Frequency |
| LAURA | L-band AUtomatic RAdiometer |
| LHCP | Left-Hand Circularly Polarized |
| LO | Local Oscillator |
| MBE | Main Beam Efficiency |
| MFT | Multiresolution Fourier Transform |
| MWR | Microwave Radiometry |
| NIR | Near-Infrared |
| OMT | Orthomode Transducer |
| PAU-SA | Passive Advanced Unit - Synthetic Aperture |
| PID | Proportional Integral Derivative |
| PLC | Programmable Logic Controller |
| PSR | Polarimetric Scanning Radiometer |
| R&S | Rohde & Schwarz |
| RBW | Resolution Bandwidth |
| RFI | Radio-Frequency Interference |
| RGB | Red-Green-Blue |
| RMS | Root Mean Square |
| RSLab | Remote Sensing Laboratory |
| SA | Spectrum Analyzer |
| SMOS | Soil Moisture and Ocean Salinity |
| SPDT | Single-Pole Dual-Through |
| SSMI/S | Special Sensor Microwave Imager/Sounder |
| TIR | Thermal Infrared |
| TPR | Total-Power Radiometer |
| UPC | Polytechnic University of Catalonia - BarcelonaTech |
| VBW | Video Bandwidth |
| VIS/IR | Visible/Infrared |
References
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Passive; Microwave Remote Sensing Fundamentals and Radiometry; Artech House Publishers: London, UK, 1981; Volume 1. [Google Scholar]
- World Meteorological Organization. Observing Systems Capability Analysis and Review Tool (OSCAR). Available online: https://www.wmo-sat.info/oscar/ (accessed on 26 April 2017).
- Hallikainen, M.; Kemppinen, M.; Rautiainen, K.; Pihlflyckt, J.; Lahtinen, J.; Tirri, T.; Mononen, I.; Auer, T. Airborne 14-channel microwave radiometer HUTRAD. In Proceedings of the IGARSS ’96, 1996 International Geoscience and Remote Sensing Symposium, Lincoln, NE, USA, 27–31 May 1996; Volume 4, pp. 2285–2287. [Google Scholar]
- Piepmeier, J.; Gasiewski, A. Polarimetric scanning radiometer for airborne microwave imaging studies. In Proceedings of the IGARSS ’96, 1996 International Geoscience and Remote Sensing Symposium, Lincoln, NE, USA, 27–31 May 1996; Volume 2, pp. 1120–1122. [Google Scholar]
- Kunkee, D.B.; Poe, G.A.; Boucher, D.J.; Swadley, S.D.; Hong, Y.; Wessel, J.E.; Uliana, E.A. Design and Evaluation of the First Special Sensor Microwave Imager/Sounder. IEEE Trans. Geosci. Remote Sens. 2008, 46, 863–883. [Google Scholar] [CrossRef]
- Kawanishi, T.; Sezai, T.; Ito, Y.; Imaoka, K.; Takeshima, T.; Ishido, Y.; Shibata, A.; Miura, M.; Inahata, H.; Spencer, R. The advanced microwave scanning radiometer for the earth observing system (AMSR-E), NASDA’s contribution to the EOS for global energy and water cycle studies. IEEE Trans. Geosci. Remote Sens. 2003, 41, 184–194. [Google Scholar] [CrossRef]
- Cardellach, E.; Fabra, F.; Nogués-Correig, O.; Oliveras, S.; Ribó, S.; Rius, A. GNSS-R ground-based and airborne campaigns for ocean, land, ice, and snow techniques: Application to the GOLD-RTR data sets. Radio Sci. 2011, 46. [Google Scholar] [CrossRef]
- Zavorotny, V.U.; Gleason, S.; Cardellach, E.; Camps, A. Tutorial on remote sensing using GNSS bistatic radar of opportunity. IEEE Geosci. Remote Sens. Mag. 2014, 2, 8–45. [Google Scholar] [CrossRef]
- Alonso-Arroyo, A.; Camps, A.; Monerris, A.; Rudiger, C.; Walker, J.P.; Onrubia, R.; Querol, J.; Park, H.; Pascual, D. On the Correlation Between GNSS-R Reflectivity and L-Band Microwave Radiometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5862–5879. [Google Scholar] [CrossRef]
- Valencia, E.; Camps, A.; Marchan-Hernandez, J.F.; Park, H.; Bosch-Lluis, X.; Rodriguez-Alvarez, N.; Ramos-Perez, I. Ocean surface’s scattering coefficient retrieval by delay-Doppler map inversion. IEEE Geosci. Remote Sens. Lett. 2011, 8, 750–754. [Google Scholar] [CrossRef]
- Piles, M.; Sanchez, N.; Vall-llossera, M.; Camps, A.; Martinez-Fernandez, J.; Martinez, J.; Gonzalez-Gambau, V. A Downscaling Approach for SMOS Land Observations: Evaluation of High-Resolution Soil Moisture Maps Over the Iberian Peninsula. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3845–3857. [Google Scholar] [CrossRef]
- Oliva, R.; Daganzo, E.; Kerr, Y.H.; Mecklenburg, S.; Nieto, S.; Richaume, P.; Gruhier, C. SMOS Radio Frequency Interference Scenario: Status and Actions Taken to Improve the RFI Environment in the 1400–1427 MHz Passive Band. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1427–1439. [Google Scholar] [CrossRef]
- Njoku, E.; Ashcroft, P.; Chan, T.; Li, L. Global survey and statistics of radio-frequency interference in AMSR-E land observations. IEEE Trans. Geosci. Remote Sens. 2005, 43, 938–947. [Google Scholar] [CrossRef]
- Park, H.; Gonzalez-Gambau, V.; Camps, A.; Vall-llossera, M. Improved MUSIC-Based SMOS RFI Source Detection and Geolocation Algorithm. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1311–1322. [Google Scholar] [CrossRef]
- Guner, B.; Johnson, J.T.; Niamsuwan, N. Time and frequency blanking for radio-frequency interference mitigation in microwave radiometry. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3672–3679. [Google Scholar] [CrossRef]
- Querol, J.; Onrubia, R.; Alonso-Arroyo, A.; Pascual, D.; Park, H.; Camps, A. Performance Assessment of Time-Frequency RFI Mitigation Techniques in Microwave Radiometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1–11. [Google Scholar] [CrossRef]
- De Roo, R.D.; Misra, S.; Ruf, C.S. Sensitivity of the Kurtosis Statistic as a Detector of Pulsed Sinusoidal RFI. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1938–1946. [Google Scholar] [CrossRef]
- Tarongi, J.M.; Camps, A. Normality Analysis for RFI Detection in Microwave Radiometry. Remote Sens. 2009, 2, 191–210. [Google Scholar] [CrossRef]
- Gasiewski, A.; Klein, M.; Yevgrafov, A.; Leuskiy, V. Interference mitigation in passive microwave radiometry. In Proceedings of the 2002 IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; Volume 3, pp. 1682–1684. [Google Scholar]
- Skou, N.; Kristensen, S.S.; Ruokokoski, T.; Lahtinen, J. On-board digital RFI and polarimetry processor for future spaceborne radiometer systems. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 3423–3426. [Google Scholar]
- Tarongí, J.M. Radio Frequency Interference in Microwave Radiometry: Statistical Analysis and Study of Techniques for Detection and Mitigation. Ph.D. Thesis, UPC-BarcelonaTech, Barcelona, Spain, 2012. Available online: http://www.tdx.cat/handle/10803/117023 (accessed on 27 February 2017).
- Forte Véliz, G.F. Contributions to Radio Frequency Interference detection and mitigation in Earth observation. Ph.D. Thesis, UPC-BarcelonaTech, Barcelona, Spain, 2014. Available online: http://www.tdx.cat/handle/10803/285320 (accessed on 27 February 2017).
- Tarongi, J.M.; Camps, A. Multifrequency experimental radiometer with interference tracking for experiments over land and littoral: Meritxell. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009; pp. IV-653–IV-656. [Google Scholar]
- Depau, V.; Tarongi, J.; Forte, G.; Camps, A. Preliminary performance study of different radio-frequency interference detection and mitigation algorithms in microwave radiometry. In Proceedings of the 2012 12th Specialist Meeting on Microwave Radiometry and Remote Sensing of the Environment (MicroRad), Rome, Italy, 5–9 March 2012; pp. 1–4. [Google Scholar]
- Villarino Villarino, R.M. Empirical Determination of the Sea Surface Emissivity at L-band: A contribution to ESA’s SMOS Earth Explorer Mission. Ph.D. Thesis; UPC-BarcelonaTech: Barcelona, Spain, 2004. Available online: http://www.tdx.cat/handle/10803/6884 (accessed on 27 February 2017).
- Rohde and Schwarz. FSP Spectrum Analyzer, Operating Manual. Available online: https://www.rohde-schwarz.com/us/manual/r-s-fsp-operating-manual-manuals-gb178701-39944.html (accessed on 27 February 2017).
- Rodriguez-Alvarez, N.; Camps, A.; Vall-llossera, M.; Bosch-Lluis, X.; Monerris, A.; Ramos-Perez, I.; Valencia, E.; Marchan-Hernandez, J.F.; Martinez-Fernandez, J.; Baroncini-Turricchia, G.; et al. Land Geophysical Parameters Retrieval Using the Interference Pattern GNSS-R Technique. IEEE Trans. Geosci. Remote Sens. 2011, 49, 71–84. [Google Scholar] [CrossRef]
- Valencia, E.; Zavorotny, V.U.; Akos, D.M.; Camps, A. Using DDM asymmetry metrics for wind direction retrieval from GPS ocean-scattered signals in airborne experiments. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3924–3936. [Google Scholar] [CrossRef]
- SiGe GN3S Sampler v.2. Available online: http://www.sparkfun.com/products/8238 (accessed on 27 February 2017).
- FLIR. Industrial Automation IR Camera, FLIR A320 Series Datasheet. Available online: http://flir-a320.ru/files/upload/general/610/1548/090722A320datasheeteng.pdf (accessed on 20 Apirl 2017).
- Pettorelli, N. The Normalized Difference Vegetation Index; Oxford University Press: Oxford, UK, 2013. [Google Scholar]
- DuncanTech. High Resolution 3-CCD Digital Multispectral Camera, MS4100 Datasheet. Available online: http://prom-sys.com/pdf/MS4100.pdf (accessed on 20 Apirl 2017).
- Wansview. Network IP box Camera, NC510 Datasheet. Available online: https://www.wansview.us/NC510-p/nc510.htm (accessed on 20 Apirl 2017).
- Han, Y.; Westwater, E. Analysis and improvement of tipping calibration for ground-based microwave radiometers. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1260–1276. [Google Scholar]
- Wu, L.; Peng, S.; Xiao, Z.; Hu, T.; Xu, J. Calibration of a W band radiometer using tipping curve. In Proceedings of the 2010 International Symposium on Signals, Systems and Electronics, Nanjing, China, 17–20 September 2010; pp. 1–3. [Google Scholar]
- Land, D.V.; Levick, A.P.; Hand, J.W. The use of the Allan deviation for the measurement of the noise and drift performance of microwave radiometers. Meas. Sci. Technol. 2007, 18, 1917–1928. [Google Scholar] [CrossRef]
- Querol, J.; Alonso-Arroyo, A.; Onrubia, R.; Pascual, D.; Park, H.; Camps, A. SNR Degradation in GNSS-R Measurements Under the Effects of Radio-Frequency Interference. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4865–4878. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Application | Frequency (GHz) |
|---|---|
| Clouds water content | 21, 37, 90 |
| Ice classification | 10, 18, 37 |
| Sea oil spills tracking | 6.6, 37 |
| Rain over soil | 18, 37, 55, 90, 180 |
| Rain over the ocean | 10, 18, 21, 37 |
| Sea ice concentration | 18, 37, 90 |
| Sea surface temperature | 6.6, 10, 18, 21, 37 |
| Sea surface wind speed | 10, 18 |
| Snow coating | 6.6, 10, 18, 37, 90 |
| Soil moisture | 1.4, 6.6 |
| Atmospheric temperature profiles | 21, 37, 55, 90, 180 |
| Atmospheric water vapor | 21, 37, 90, 180 |
| Vegetation Water Content | 1.4 |
| Land surface temperature | 7, 10 |
| Biomass | 7, 10, 19 |
| Frequency Band | Beamwidth | CPI | |||
|---|---|---|---|---|---|
| L | 1.400–1.427 GHz | ∼25 | 95% | 35 dB | ∼95% |
| S | 2.690–2.700 GHz | ∼25 | 95% | 35 dB | ∼95% |
| C | 7.140–7.230 GHz | ∼25 | 95% | 35 dB | ∼95% |
| X | 10.60–10.70 GHz | 6 | 98% | 40 dB | ∼99% |
| K | 18.60–18.80 GHz | 5 | 98% | 40 dB | ∼99% |
| K | 23.60–24.00 GHz | 4 | 98% | 40 dB | ∼99% |
| Ka | 36.00–37.00 GHz | 4 | 98% | 40 dB | ∼99% |
| W | 86.00–92.00 GHz | 3.2 | 98% | 37 dB | ∼99% |
| Horizontal Polarization | Vertical Polarization | |||
|---|---|---|---|---|
| Frequency Band | Integration Time (s) | Allan Deviation () | Integration Time (s) | Allan Deviation () |
| L | 193 | 1.73 | 142 | 1.44 |
| S | 35 | 2.77 | 49 | 2.30 |
| C | 55 | 2.49 | 16 | 3.83 |
| X | 89 | 1.93 | 34 | 3.18 |
| K’ | 29 | 3.62 | 13 | 4.89 |
| K” | 55 | 2.48 | 77 | 2.55 |
| Ka | 50 | 2.79 | 6 | 6.29 |
| W | 13 | 7.14 | 17 | 4.56 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Querol, J.; Tarongí, J.M.; Forte, G.; Gómez, J.J.; Camps, A. MERITXELL: The Multifrequency Experimental Radiometer with Interference Tracking for Experiments over Land and Littoral—Instrument Description, Calibration and Performance. Sensors 2017, 17, 1081. https://doi.org/10.3390/s17051081
Querol J, Tarongí JM, Forte G, Gómez JJ, Camps A. MERITXELL: The Multifrequency Experimental Radiometer with Interference Tracking for Experiments over Land and Littoral—Instrument Description, Calibration and Performance. Sensors. 2017; 17(5):1081. https://doi.org/10.3390/s17051081
Chicago/Turabian StyleQuerol, Jorge, José Miguel Tarongí, Giuseppe Forte, José Javier Gómez, and Adriano Camps. 2017. "MERITXELL: The Multifrequency Experimental Radiometer with Interference Tracking for Experiments over Land and Littoral—Instrument Description, Calibration and Performance" Sensors 17, no. 5: 1081. https://doi.org/10.3390/s17051081
APA StyleQuerol, J., Tarongí, J. M., Forte, G., Gómez, J. J., & Camps, A. (2017). MERITXELL: The Multifrequency Experimental Radiometer with Interference Tracking for Experiments over Land and Littoral—Instrument Description, Calibration and Performance. Sensors, 17(5), 1081. https://doi.org/10.3390/s17051081