
Vehicle Counting and Moving Direction Identification Based on Small-Aperture Microphone Array

 , ,
, ,  and
and 
Abstract
:1. Introduction
2. Design of the Estimation System
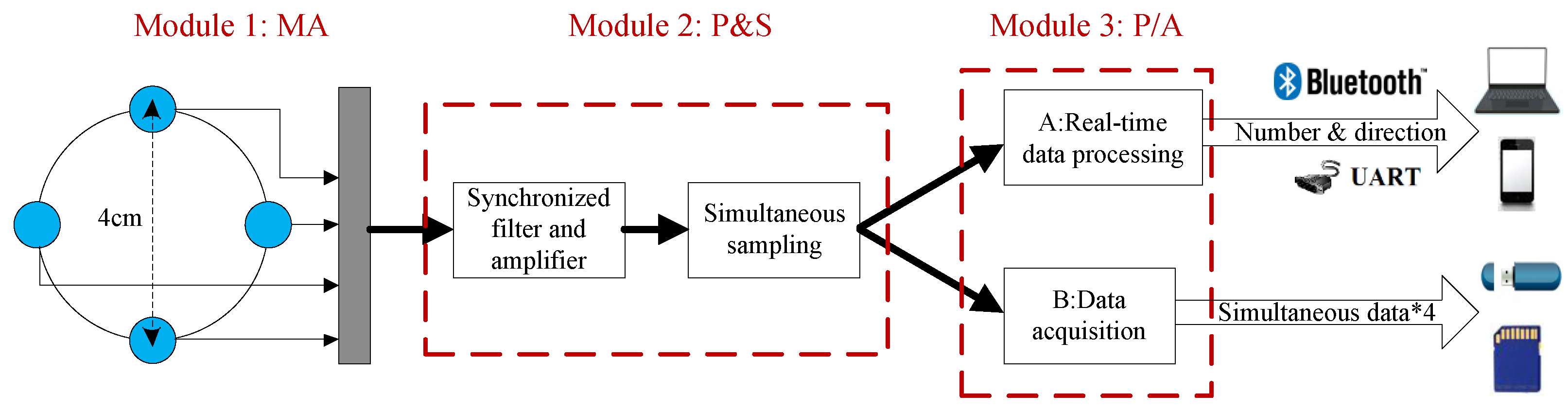
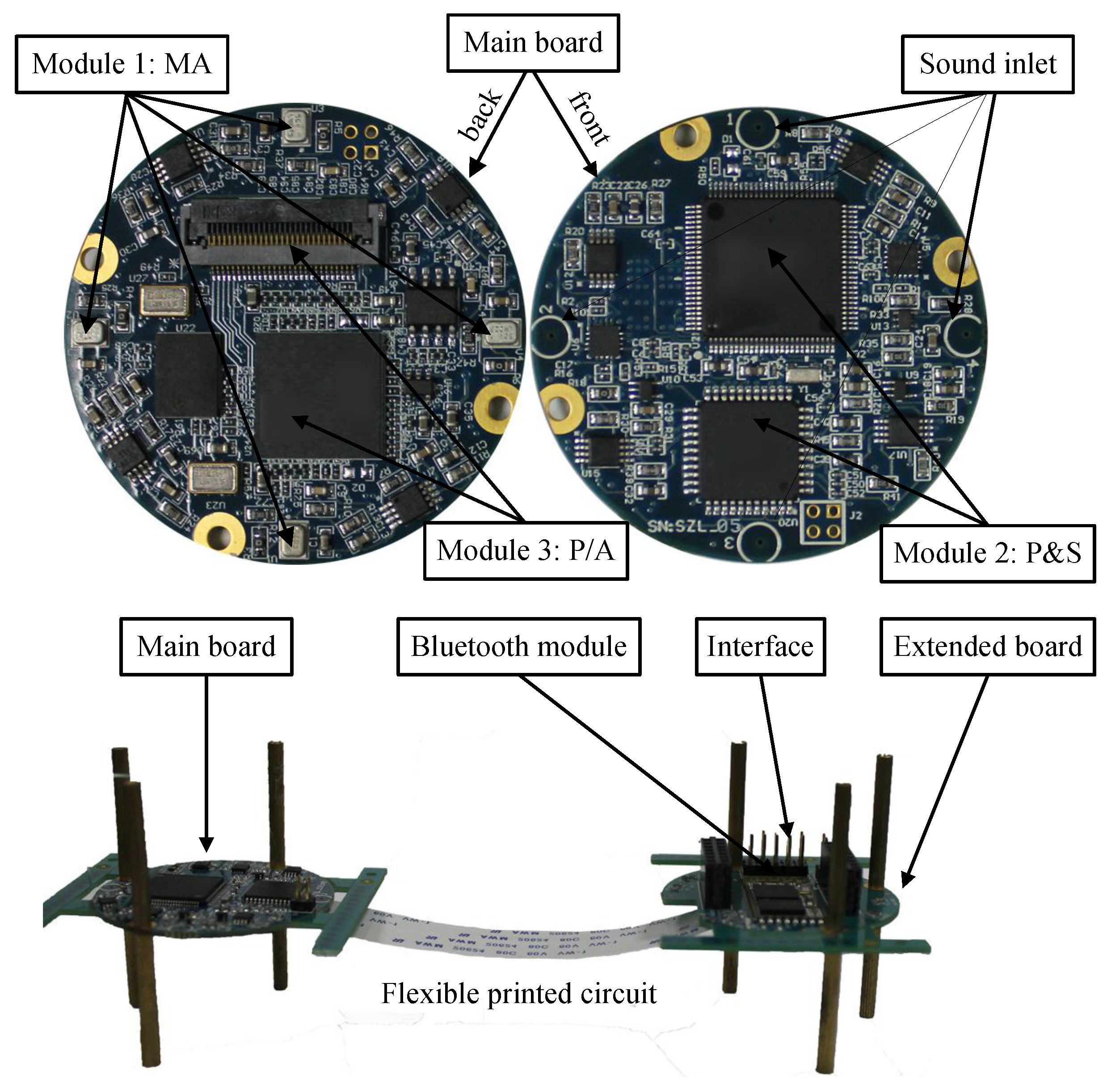
2.1. SAMA System Architecture Design
2.2. DOA Estimation with Spatial Coherence
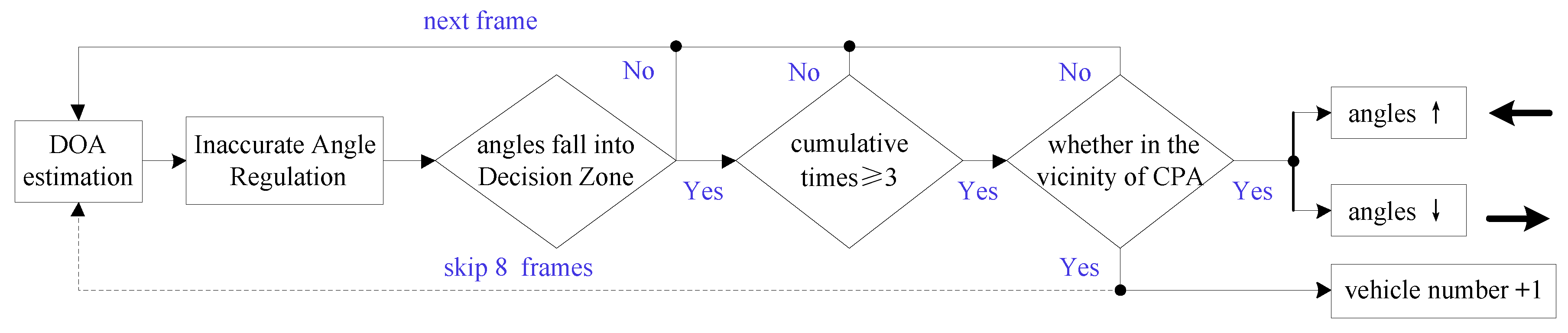
3. Vehicle Counting and Moving Direction Estimation
4. System Verification and Experimental Results
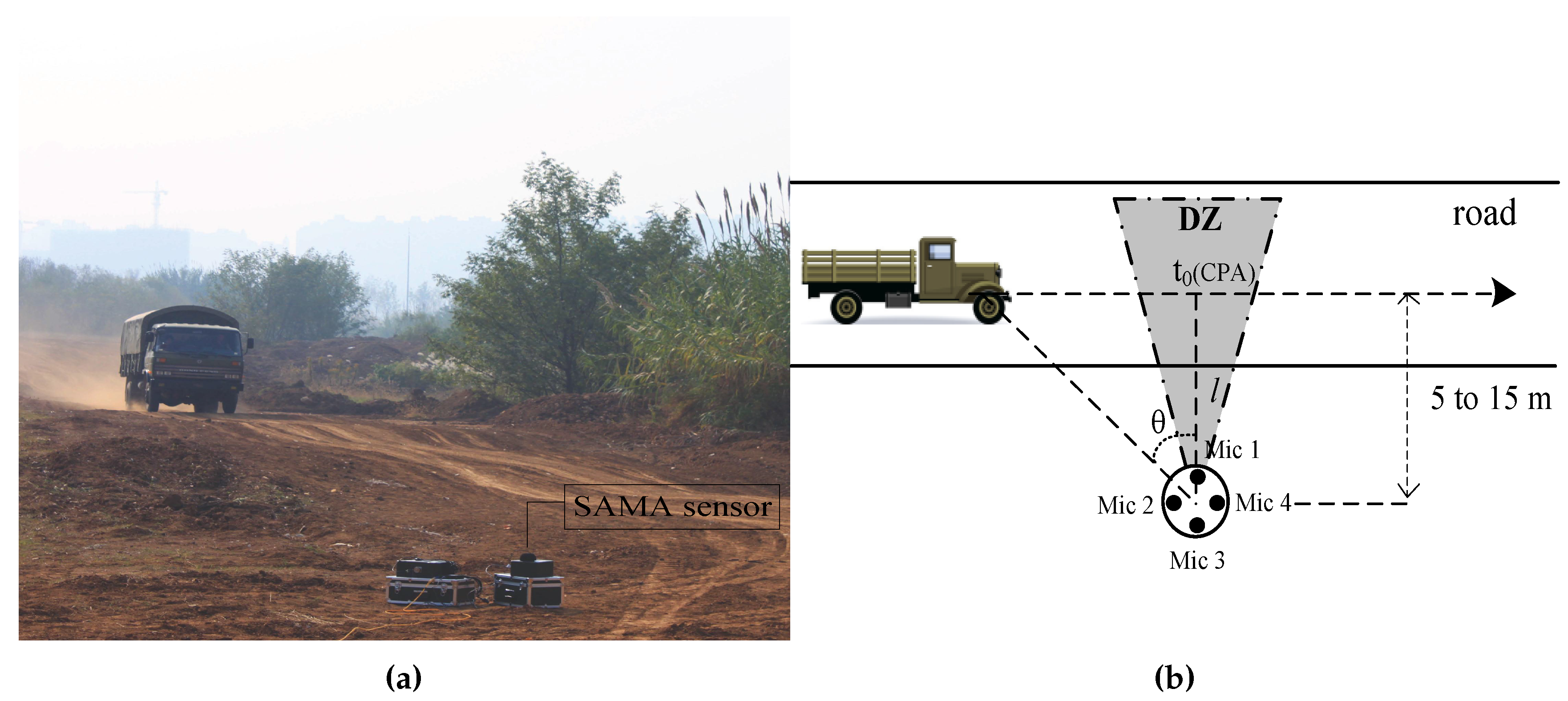
4.1. Experimental Conditions and Datasets
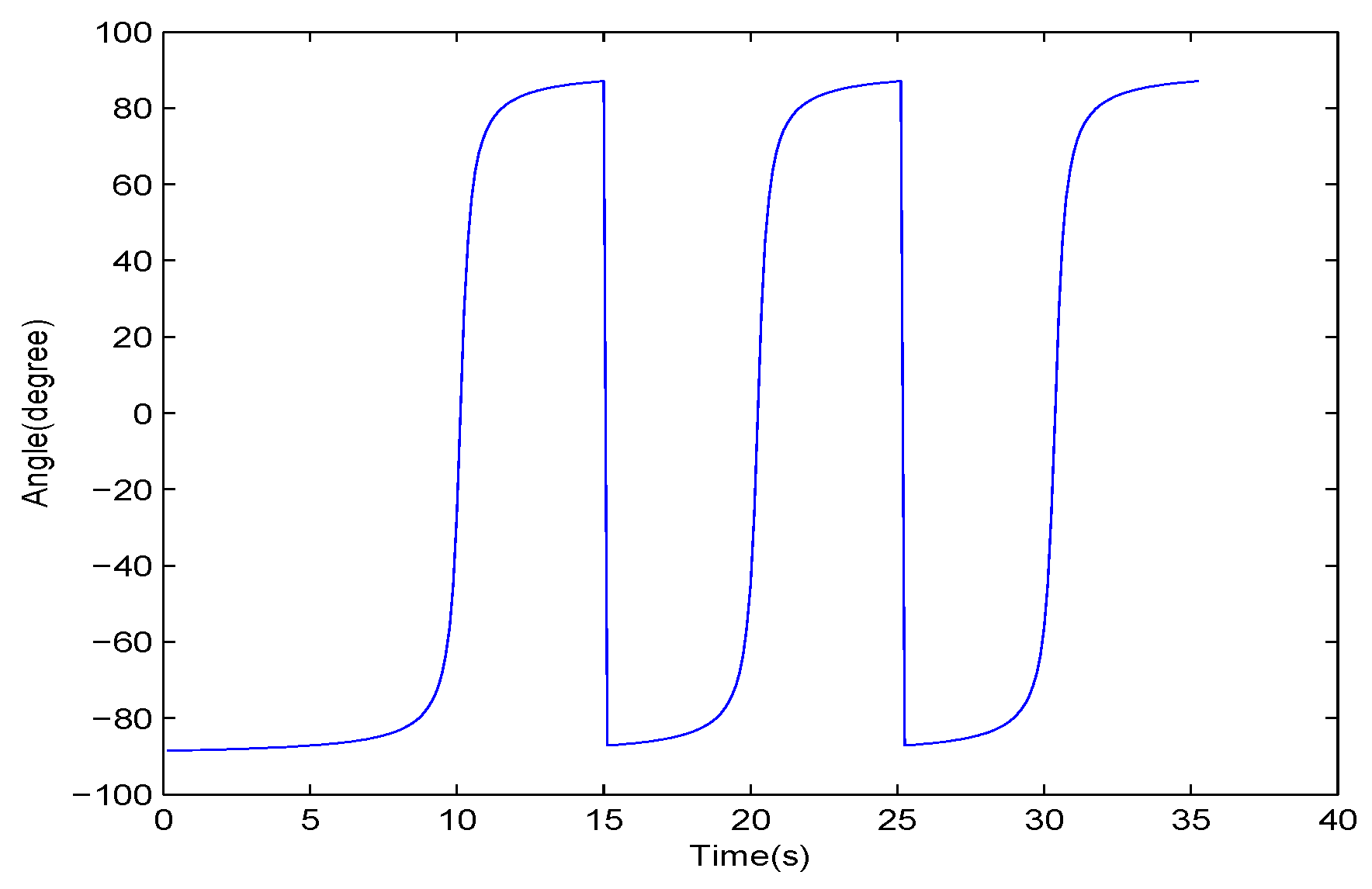
4.2. Results and Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Toyoda, T.; Ono, N.; Miyabe, S.; Yamada, T.; Makino, S. Vehicle Counting and Lane Estimation with Ad-hoc Microphone Array in Real Road Environments. In Proceedings of the 2016 International Workshop on Nonlinear Circuits, Communications and Signal Processing, Honolulu, HI, USA, 6–9 March 2016; pp. 622–625. [Google Scholar]
- Severdaks, A.; Liepins, M. Vehicle counting and motion direction detection using microphone array. Elektron. Elektrotech. 2013, 19, 89–92. [Google Scholar] [CrossRef]
- Toyoda, T.; Ono, N.; Miyabe, S.; Yamada, T.; Makino, S. Traffic monitoring with ad-hoc microphone array. In Proceedings of the 2014 14th International Workshop on Acoustic Signal Enhancement (IWAENC), Riviera, France, 8–11 September 2014; pp. 318–322. [Google Scholar]
- Nesenbergs, K.; Selavo, L. A distributed data processing architecture for real time intelligent transport systems. In Proceedings of the 2013 Second International Conference on Informatics & Applications (ICIA), Lodz, Poland, 23–25 September 2013. [Google Scholar]
- Fernández-Lozano, J.; Martín-Guzmán, M.; Martín-Ávila, J.; García-Cerezo, A. A wireless sensor network for urban traffic characterization and trend monitoring. Sensors 2015, 15, 26143–26169. [Google Scholar] [CrossRef] [PubMed]
- Heberley, J.R.; Hohil, M.M.; Chang, J.W.; Rotolo, A.G. Method for Detecting Extended Range Motion and Counting Moving Objects Using an Acoustics Microphone Array. U.S. Patent 6,914,854, 5 July 2005. [Google Scholar]
- Marszałek, Z.; Sroka, R.; Stencel, M. A new method of inductive sensor impedance measurement applied to the identification of vehicle parameters. Metrol. Meas. Syst. 2011, 18, 69–76. [Google Scholar] [CrossRef]
- Minge, E.; Kotzenmacher, J.; Peterson, S. Evaluation of Non-Intrusive Technologies for Traffic Detection; Technical Report; Minnesota Department of Transportation, Research Services Section: St. Paul, MN, USA, 2010. [Google Scholar]
- Jeon, S.; Kwon, E.; Jung, I. Traffic measurement on multiple drive lanes with wireless ultrasonic sensors. Sensors 2014, 14, 22891–22906. [Google Scholar] [CrossRef] [PubMed]
- Huang, J.; Zhou, Q.; Zhang, X.; Song, E.; Li, B.; Yuan, X. Seismic Target Classification Using a Wavelet Packet Manifold in Unattended Ground Sensors Systems. Sensors 2013, 13, 8534–8550. [Google Scholar] [CrossRef] [PubMed]
- Pancharatnam, M.; Sonnadara, D. Vehicle counting and classification from a traffic scene. In Proceedings of the 26th National IT Conference, Colombo, Sri Lanka, 20–21 August 2008. [Google Scholar]
- Taghvaeeyan, S.; Rajamani, R. Portable roadside sensors for vehicle counting, classification, and speed measurement. IEEE Trans. Intell. Transp. Syst. 2014, 15, 73–83. [Google Scholar] [CrossRef]
- Hohil, M.E. Vehicle counting and classification algorithms for unattended ground sensors. Proc. SPIE 2003, 5090, 99–110. [Google Scholar]
- Li, D.; Wong, K.D.; Hu, Y.H.; Sayeed, A.M. Detection, classification, and tracking of targets. IEEE Signal Process. Mag. 2002, 19, 17–29. [Google Scholar]
- Huang, J.; Zhang, X.; Guo, F.; Zhou, Q.; Liu, H.; Li, B. Design of an acoustic target classification system based on small-aperture microphone array. IEEE Trans. Instrum. Meas. 2015, 64, 2035–2043. [Google Scholar] [CrossRef]
- Arora, A.; Dutta, P.; Bapat, S.; Kulathumani, V.; Zhang, H.; Naik, V.; Mittal, V.; Cao, H.; Demirbas, M.; Gouda, M.; et al. A line in the sand: A wireless sensor network for target detection, classification, and tracking. Comput. Netw. 2004, 46, 605–634. [Google Scholar] [CrossRef]
- Doser, A.B.; Yee, M.L.; O’Rourke, W.T.; Slinkard, M.E.; Craft, D.C.; Nguyen, H.D. Distributed algorithms for small vehicle detection, classification, and velocity estimation using unattended ground sensors. Proc. SPIE 2005, 5796, 374–385. [Google Scholar]
- Bahrampour, S.; Ray, A.; Sarkar, S.; Damarla, T.; Nasrabadi, N.M. Performance comparison of feature extraction algorithms for target detection and classification. Pattern Recognit. Lett. 2013, 34, 2126–2134. [Google Scholar] [CrossRef]
- Blatt, S.R. Multi-Sensor Target Counting and Localization System. U.S. Patent 6,690,321, 10 February 2004. [Google Scholar]
- Barbagli, B.; Bencini, L.; Magrini, I.; Manes, G.; Manes, A. A real-time traffic monitoring based on wireless sensor network technologies. In Proceedings of the 2011 7th International Wireless Communications and Mobile Computing Conference (IWCMC), Istanbul, Turkey, 4–8 July 2011; pp. 820–825. [Google Scholar]
- Scharrer, R.; Vorländer, M. Sound field classification in small microphone arrays using spatial coherences. IEEE Trans. Audio Speech Lang. Process. 2013, 21, 1891–1899. [Google Scholar] [CrossRef]
- Cevher, V.; Chellappa, R.; Mcclellan, J.H. Vehicle Speed Estimation Using Acoustic Wave Patterns. IEEE Trans. Signal Process. 2009, 57, 30–47. [Google Scholar] [CrossRef]
- Zhang, X.; Huang, J.C.; Song, E.L.; Liu, H.W.; Li, B.Q.; Yuan, X.B. Design of Small MEMS Microphone Array Systems for Direction Finding of Outdoors Moving Vehicles. Sensors 2014, 14, 4384–4398. [Google Scholar] [CrossRef] [PubMed]
- Wilson, D.K.; Greenfield, R.J.; White, M.J. Spatial structure of low-frequency wind noise. J. Acoust. Soc. Am. 2007, 122, 223–228. [Google Scholar] [CrossRef] [PubMed]
- Carter, G.C. Coherence and time delay estimation. Proc. IEEE 1987, 75, 236–255. [Google Scholar] [CrossRef]
- Beaufort Scale. Available online: http://en.wikipedia.org/wiki/Beaufortscale (accessed on 5 August 2016).
- Lelong, J. Vehicle noise emission: Evaluation of tyre/road and motor-noise contributions. In Proceedings of the Internoise 99—The 1999 International Congress on Noise Control Engineering, Fort Lauderdale, FL, USA, 6–8 December 1999; Volume 1, p. 203. [Google Scholar]
- Guarnaccia, C. Advanced tools for traffic noise modelling and prediction. WSEAS Trans. Syst. 2013, 12, 121–130. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Types | |||
|---|---|---|---|
| Car | Truck | Tracked Vehicle | |
| Weight (kg) | 1425 | 6800 | 40,200 |
| Number of cylinders | 4 | 6 | 10 |
| Engine capacity | 78 | 170 | 3240 |
| Samples (min) | 107 | 104 | 95 |
| Recording Location | Chongming | Zhoushan | Fengxian | Nanjing | |
|---|---|---|---|---|---|
| Road Type | Dirt | Concrete | Sand | Mud | |
| Vehicle Type | Car | 24 | 30 | 25 | 28 |
| Truck | 26 | 28 | 22 | 28 | |
| Tracked | 31 | 0 | 30 | 34 | |
| Total Samples (min) | 81 | 58 | 77 | 90 | |
| Vehicle Type | Car | Truck | Tracked Vehicle |
|---|---|---|---|
| Average Accuracy | 90.67% | 92.86% | 96.42% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zu, X.; Zhang, S.; Guo, F.; Zhao, Q.; Zhang, X.; You, X.; Liu, H.; Li, B.; Yuan, X. Vehicle Counting and Moving Direction Identification Based on Small-Aperture Microphone Array. Sensors 2017, 17, 1089. https://doi.org/10.3390/s17051089
Zu X, Zhang S, Guo F, Zhao Q, Zhang X, You X, Liu H, Li B, Yuan X. Vehicle Counting and Moving Direction Identification Based on Small-Aperture Microphone Array. Sensors. 2017; 17(5):1089. https://doi.org/10.3390/s17051089
Chicago/Turabian StyleZu, Xingshui, Shaojie Zhang, Feng Guo, Qin Zhao, Xin Zhang, Xing You, Huawei Liu, Baoqing Li, and Xiaobing Yuan. 2017. "Vehicle Counting and Moving Direction Identification Based on Small-Aperture Microphone Array" Sensors 17, no. 5: 1089. https://doi.org/10.3390/s17051089
APA StyleZu, X., Zhang, S., Guo, F., Zhao, Q., Zhang, X., You, X., Liu, H., Li, B., & Yuan, X. (2017). Vehicle Counting and Moving Direction Identification Based on Small-Aperture Microphone Array. Sensors, 17(5), 1089. https://doi.org/10.3390/s17051089