A Robust Method to Detect BeiDou Navigation Satellite System Orbit Maneuvering/Anomalies and Its Applications to Precise Orbit Determination



Abstract
:1. Introduction
2. A Robust Method and Its Implementation Scheme of Detection of BDS Orbit Anomalies and Maneuvering
2.1. Introduction to the RMS Model of Orbit Mutual Difference
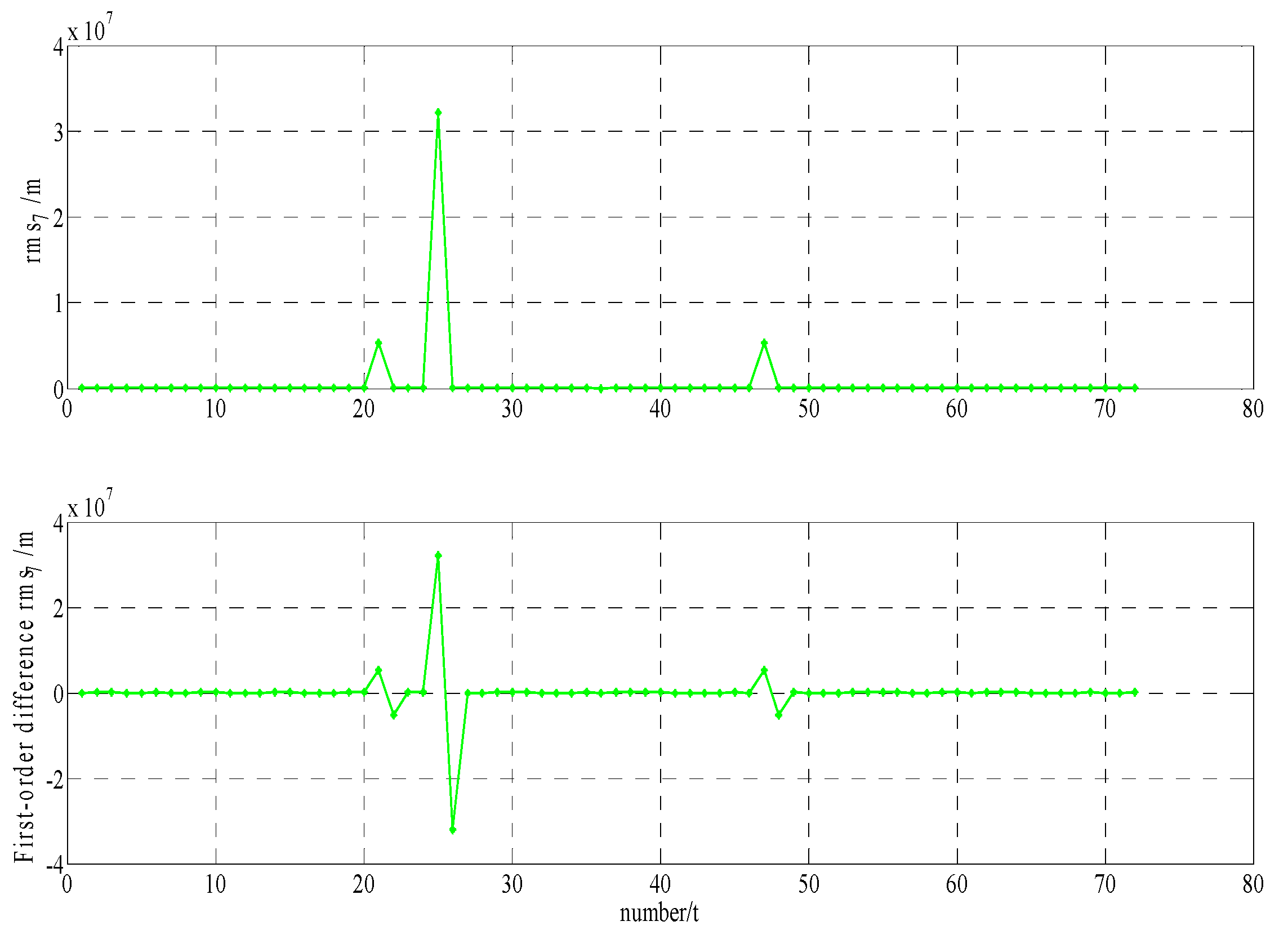
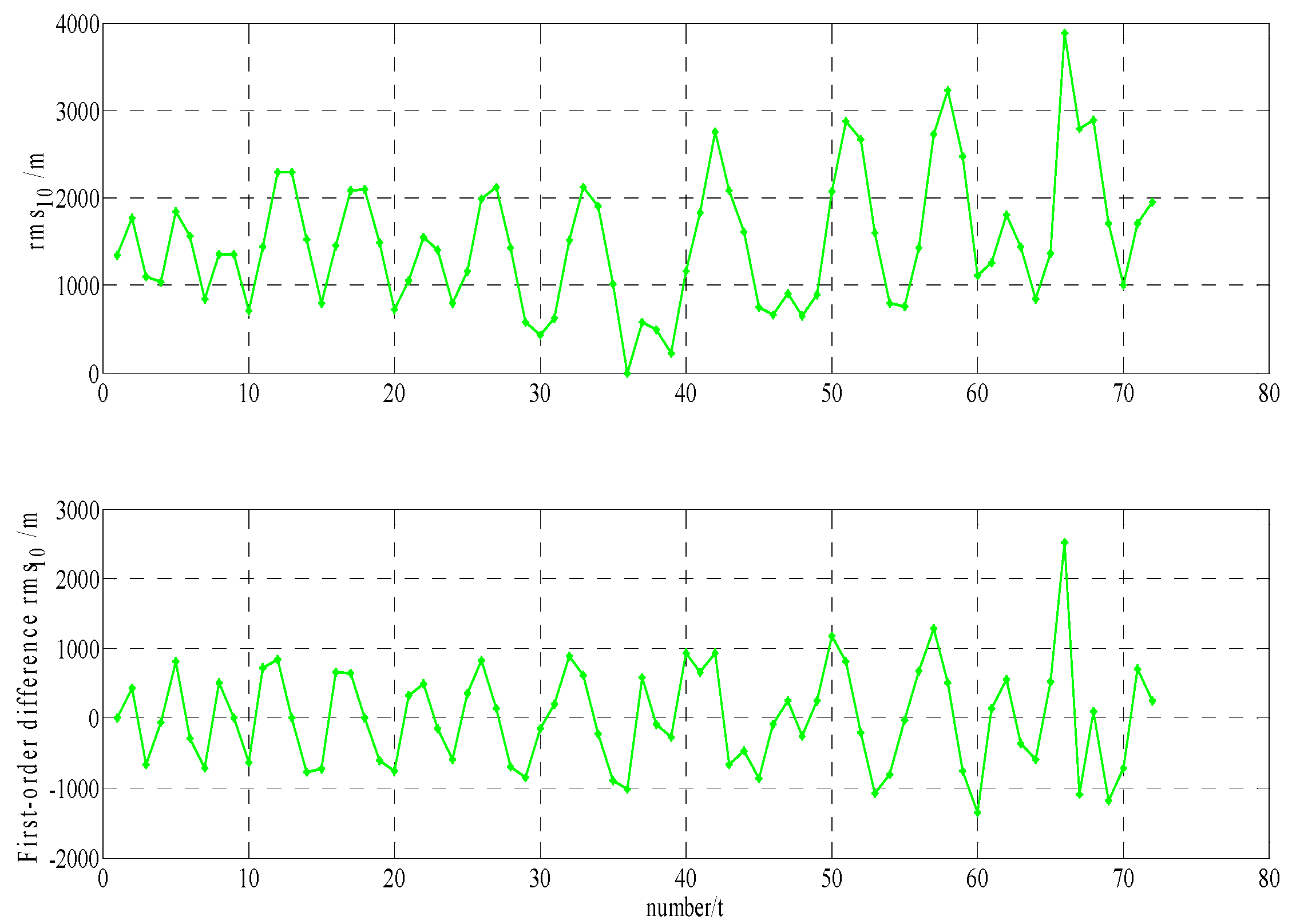
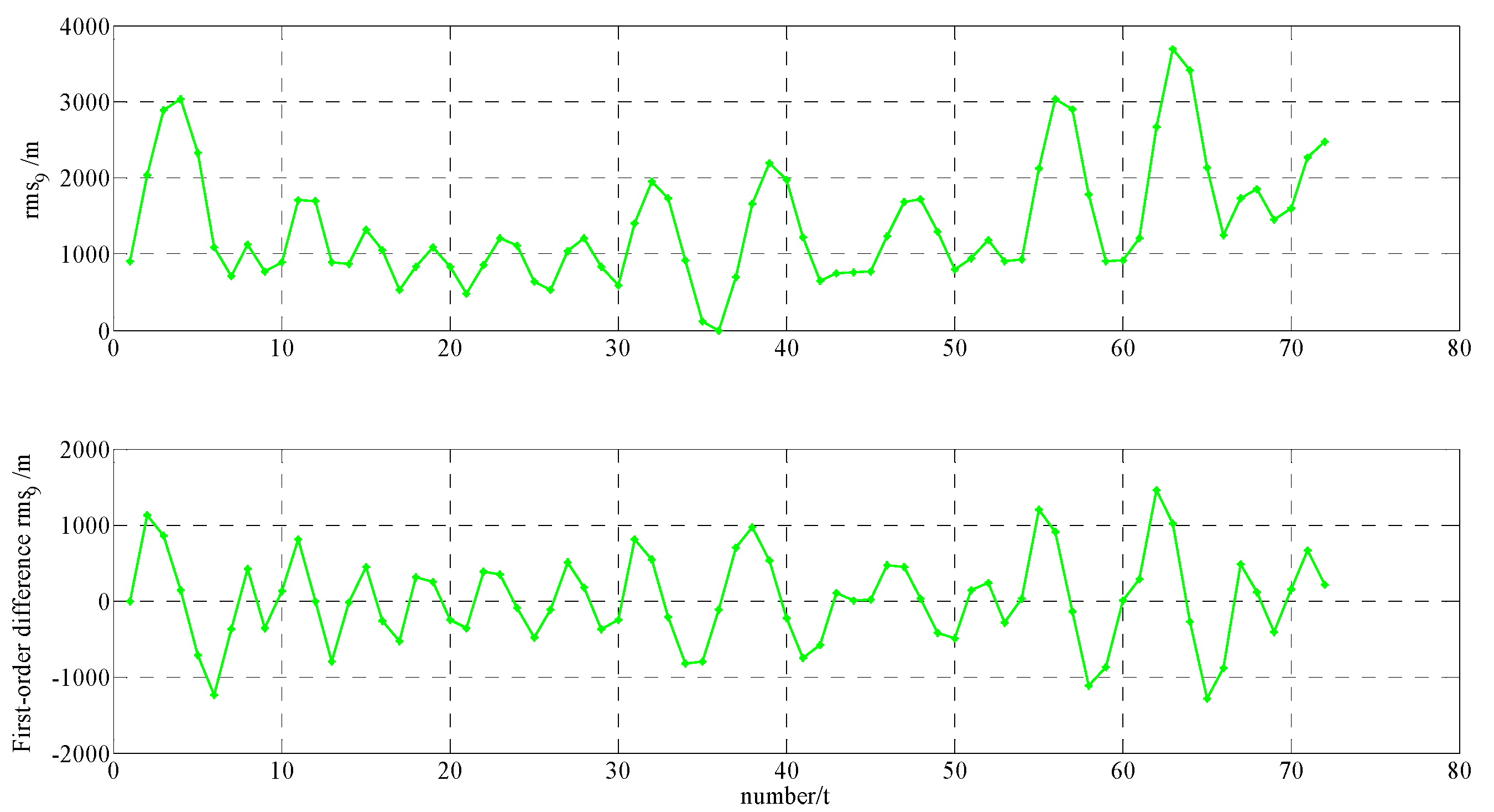
2.1.1. Analysis of the RMS Values of Orbit Mutual Difference
2.1.2. Determination on the RMS Model of Orbit Mutual Difference
2.2. A Robust Method of Detection of Orbit Anomalies and Maneuvering for BDS Satellite
- (1)
- Select as the size of the sliding ephemeris window.
- (2)
- Use the corresponding data of the broadcast ephemeris to calculate the orbital coordinate at the epoch which are predicted from the broadcast ephemeris at epoch (where ).
- (3)
- Calculate the value of orbit mutual difference according to Equation (1).
- (4)
- Select the reference epoch and get the values of the variable according to Equation (2).
- (5)
- The first-order difference operation is used for according to Equation (3), and making :
- ①
- When satellite maneuvering occurs at the epoch , the value is calculated as follows:where:after the first-order difference operation, can obtain:
- ②
- When satellite anomalies occur at the epoch , the value is calculated as follows:After a one order difference operation, can obtain:where:
- ③
- When the satellite is within normal status at the epoch , the value is calculated as follows:After a one order difference operation, can obtain:
- (6)
- Because the median is provided with high robust and high breakdown contamination rates [21,22,23,24,25], this paper uses this characteristic to suppress the influence of anomalies when maneuvering is detected. Considering the characteristics of the processing array, the absolute value of the array is first obtained by step (5), and then, according to the relationship between median and mean square error, the array of absolute value was used to calculate robust variance factors:
- (7)
- According to past experience, the paper chooses four times (it can be appropriate to enlarge if needed) the variance factors as thresholds of detection:
- (8)
- For the detection of maneuvering and anomalies at epoch , when satellite maneuvering or anomalies occur, will destruct Gaussian distributions; according to this principle, the detection criteria were set as follows:
- ①
- When satellite maneuvering occurs at the epoch , the following criteria can be obtained by Equations (8)–(11):
- ②
- When satellite anomalies occur at the epoch , the following criteria can be obtained by Equations (12)–(15):
- ③
- When the satellite stays within normal status at the epoch , the following criteria can be obtained by Equations (16)–(18):
- (9)
- The whole window moves backward at an epoch, repeating steps (2–8), until all epochs are finished.
3. Validation and Analysis
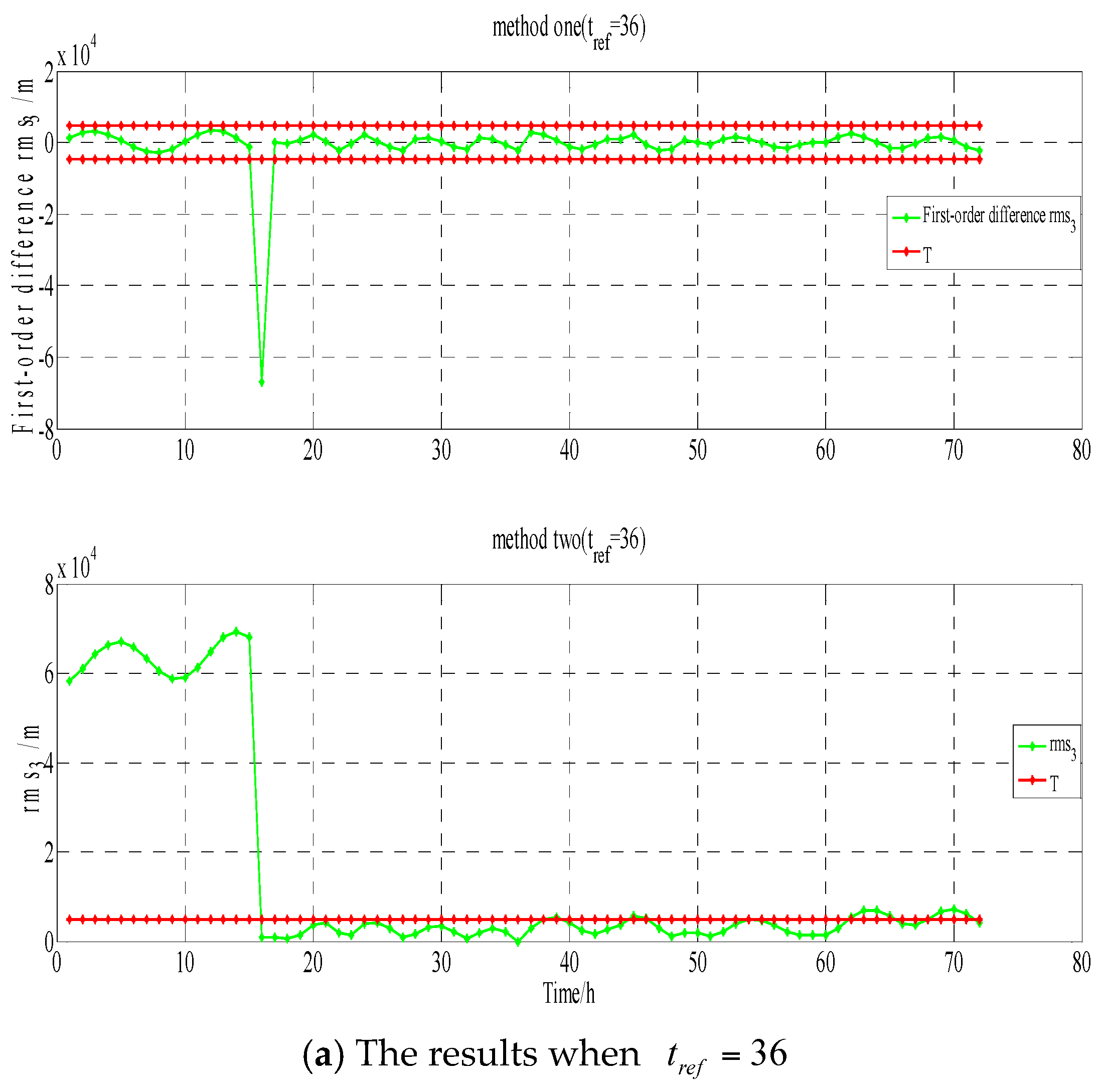
- (1)
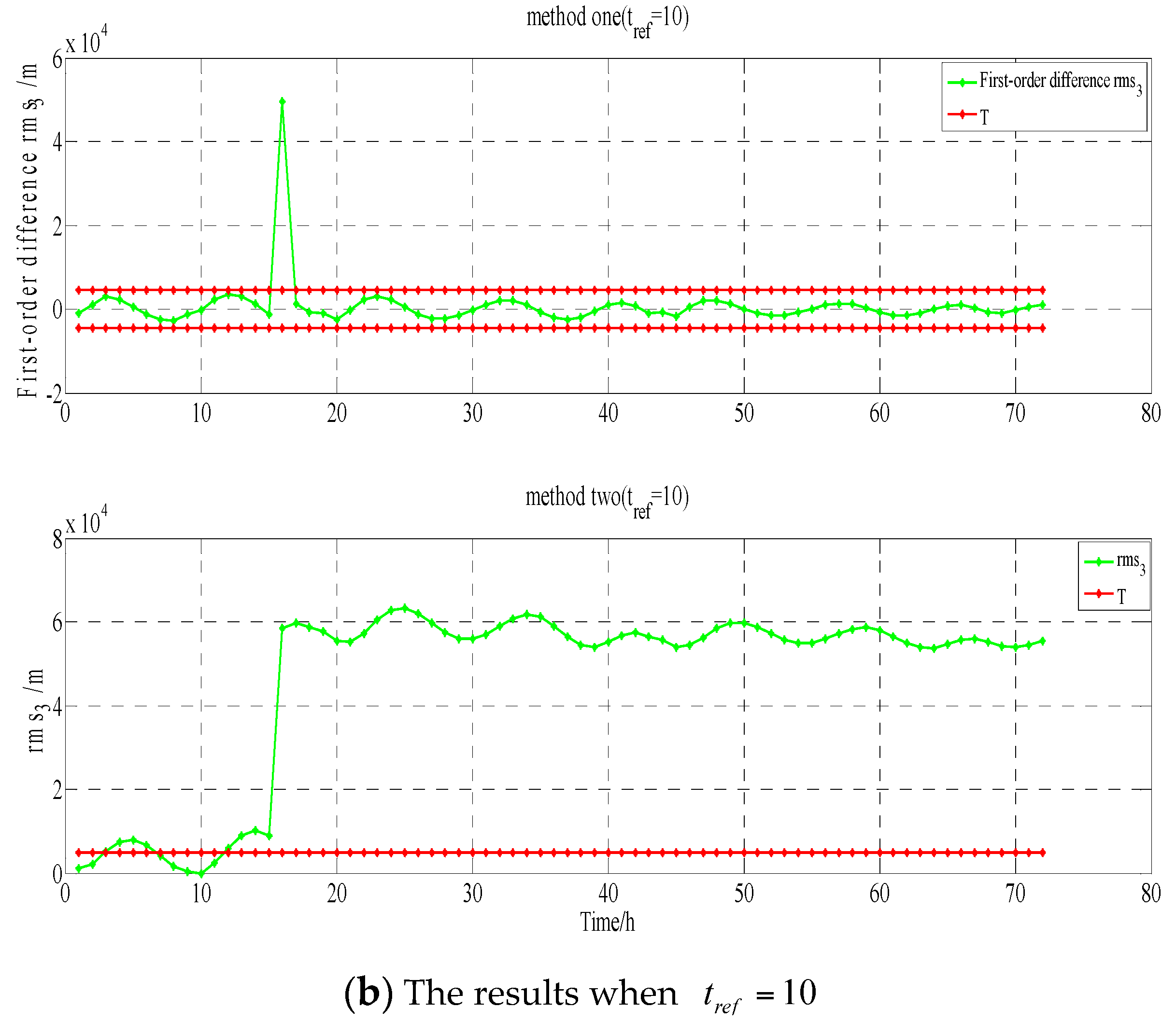
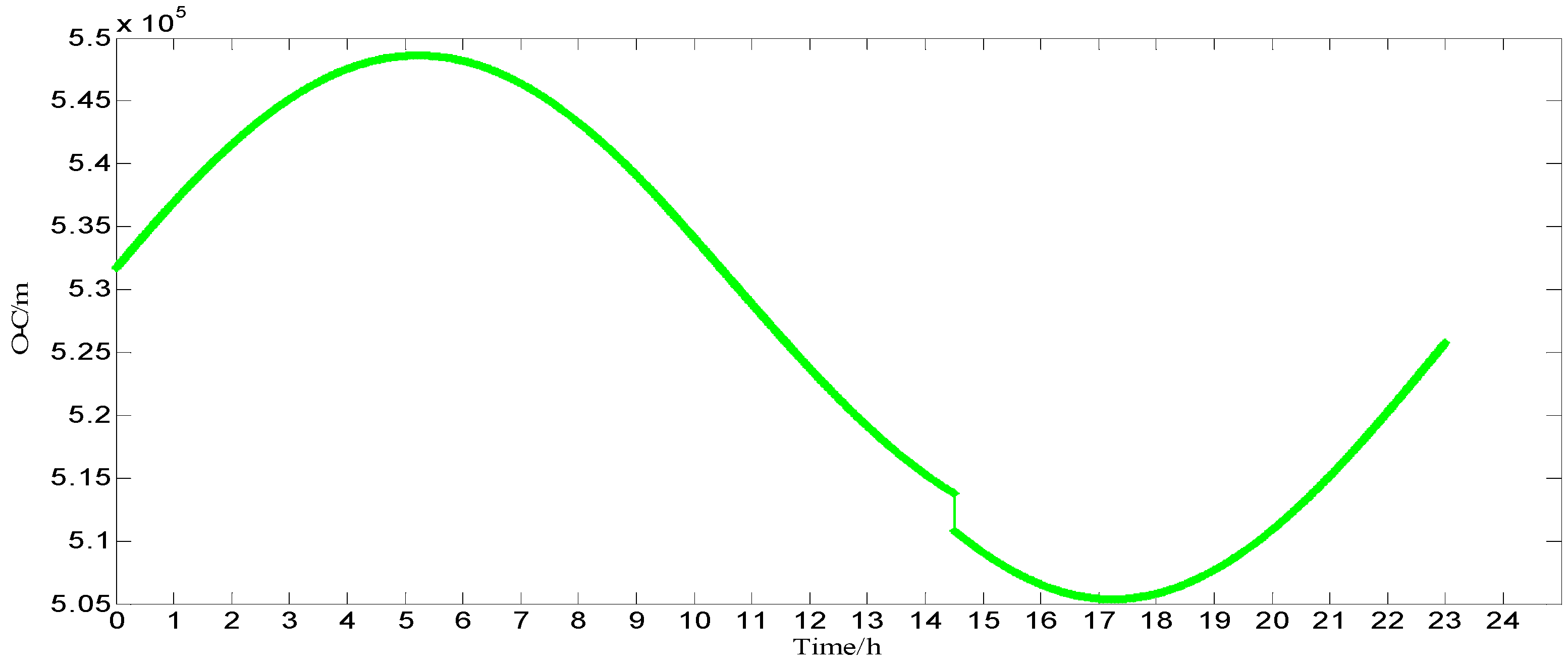
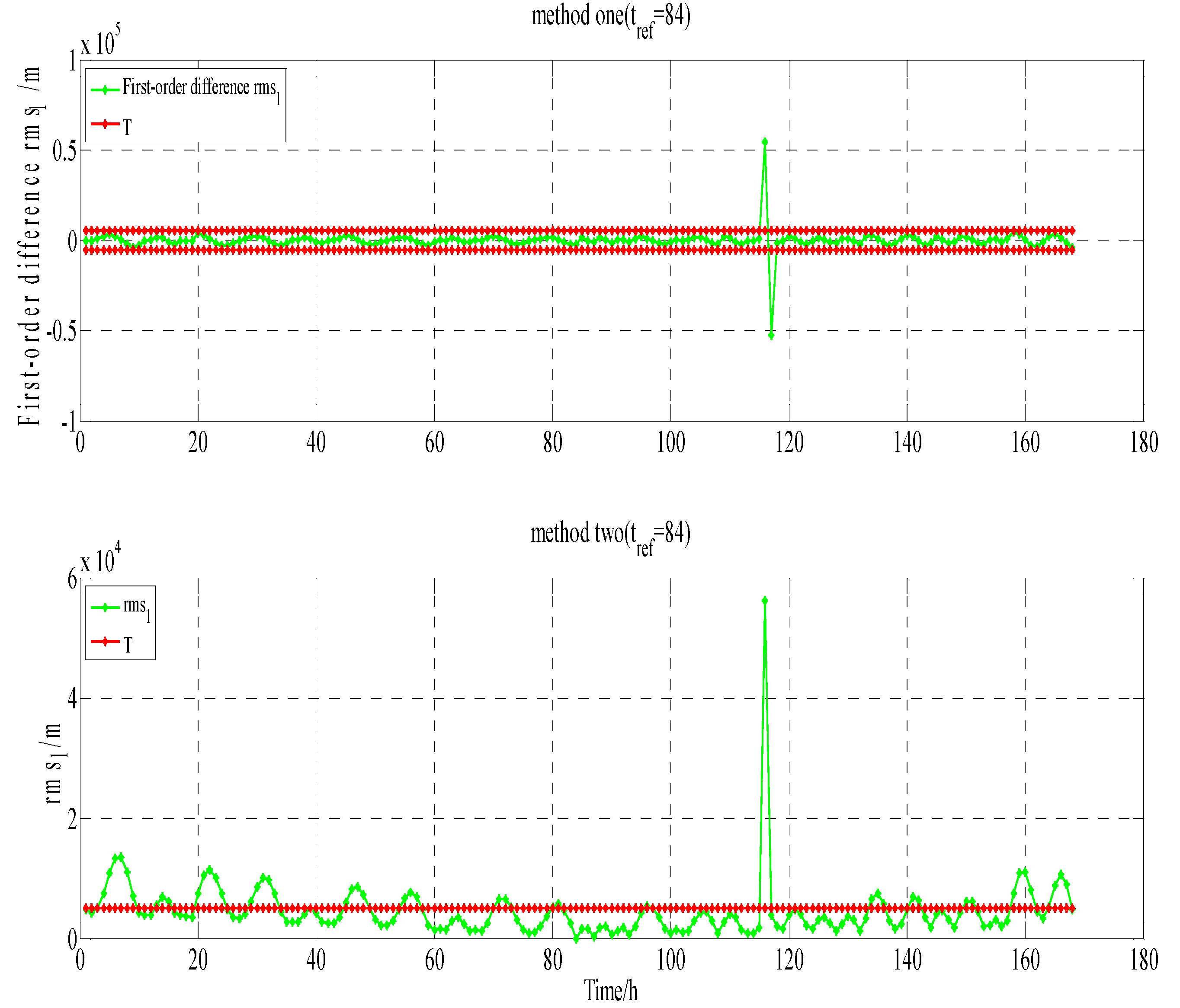
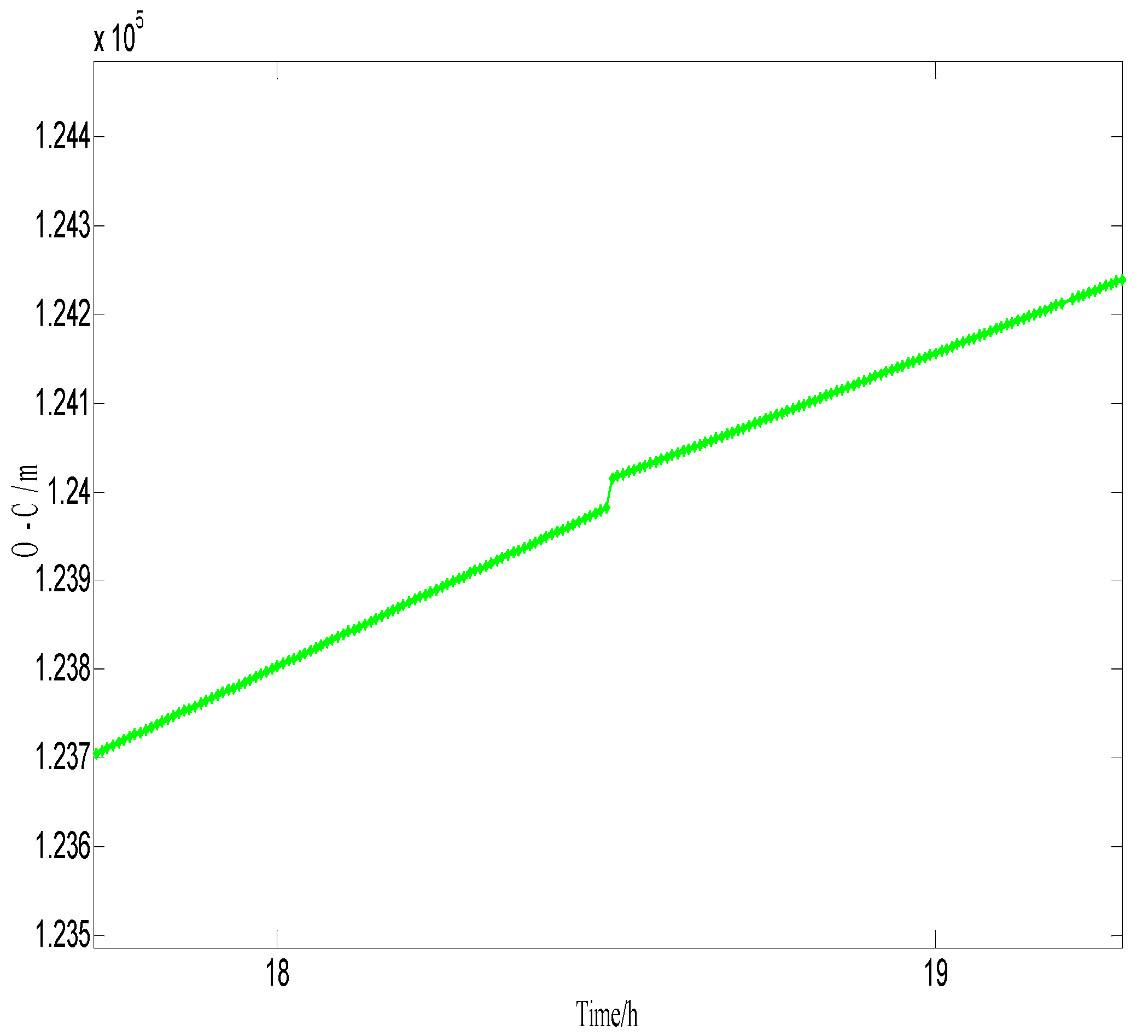
- Testing and analysis in GEO-03(PRN3). The testing results of methods one and two are shown in Figure 8 (X-axis represents time, unit is hours; Y-axis represents value calculated by Equation (3), unit is meters); from 5 January 2015 9:00 to 5 January 2015 14:00, the health flag of the broadcast ephemeris showed that GEO-03 is in an unhealthy state; on 5 January 2015, among the products of precise orbits, GFZ did not calculate the coordinates of GEO-03; at station WUH1, the O-C values of GEO-03 are shown in Figure 9 (X-axis represents time, unit is hours; Y-axis represents that station-satellite distance minus observed distance of L3, unit is meters);
- (2)
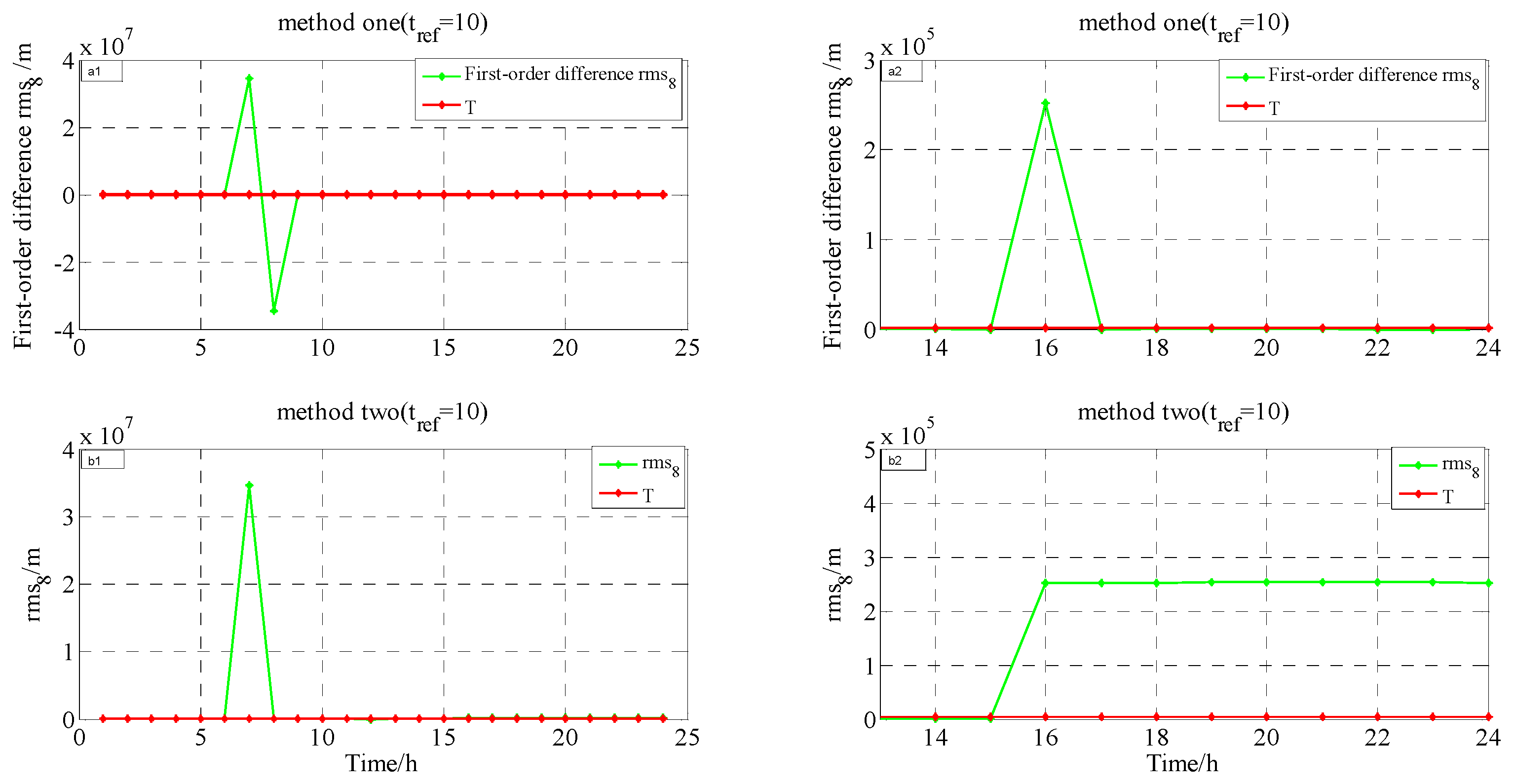
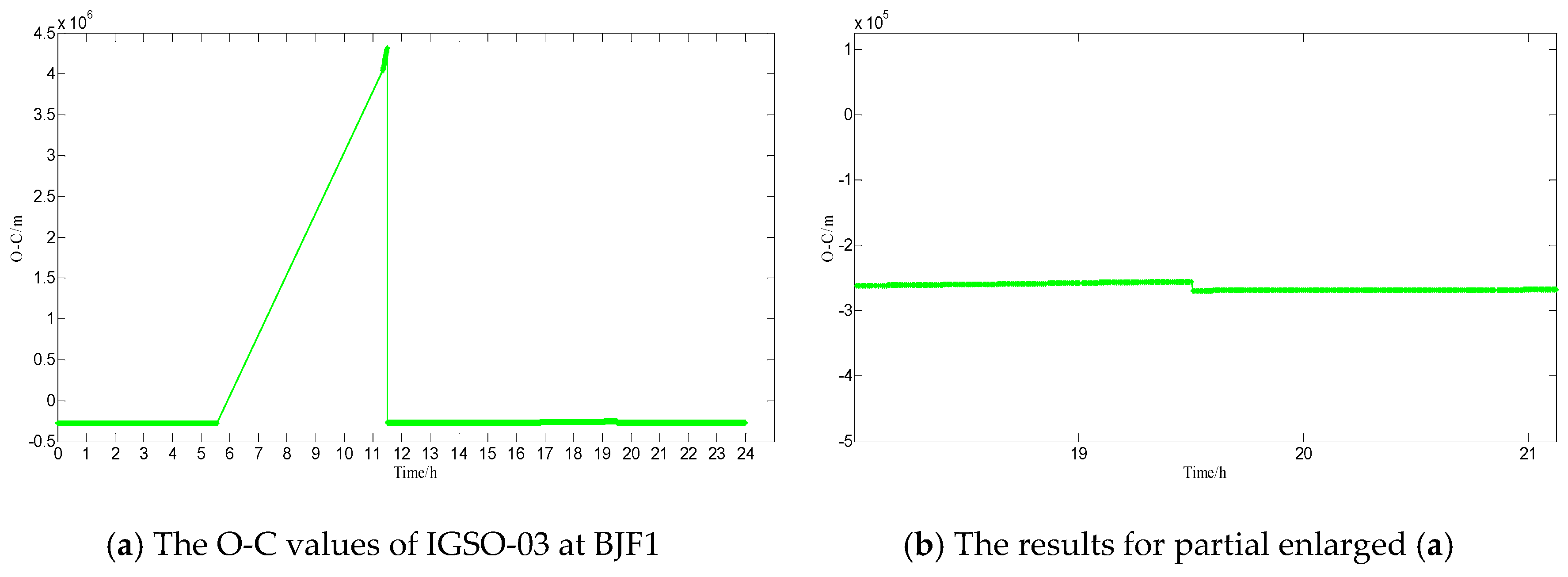
- Testing and analysis in IGSO-03(PRN8). The testing results of methods one and two are shown in Figure 10. From 9 January 2015 14:00 to 9 January 2015 20:00, the health flag of broadcast ephemeris showed that IGSO-03 is in an unhealthy state, while at 11:00, the health flag is in a healthy state. On 9 January 2015, among the products of precise orbits, GFZ did not calculate the coordinate of IGSO-03. At station BJF1, the O-C values of IGSO-03 are shown in Figure 11 (X-axis represents time, unit is hours; Y-axis represents that station-satellite distance minus observed distance of B1, unit is meters);
- (1)
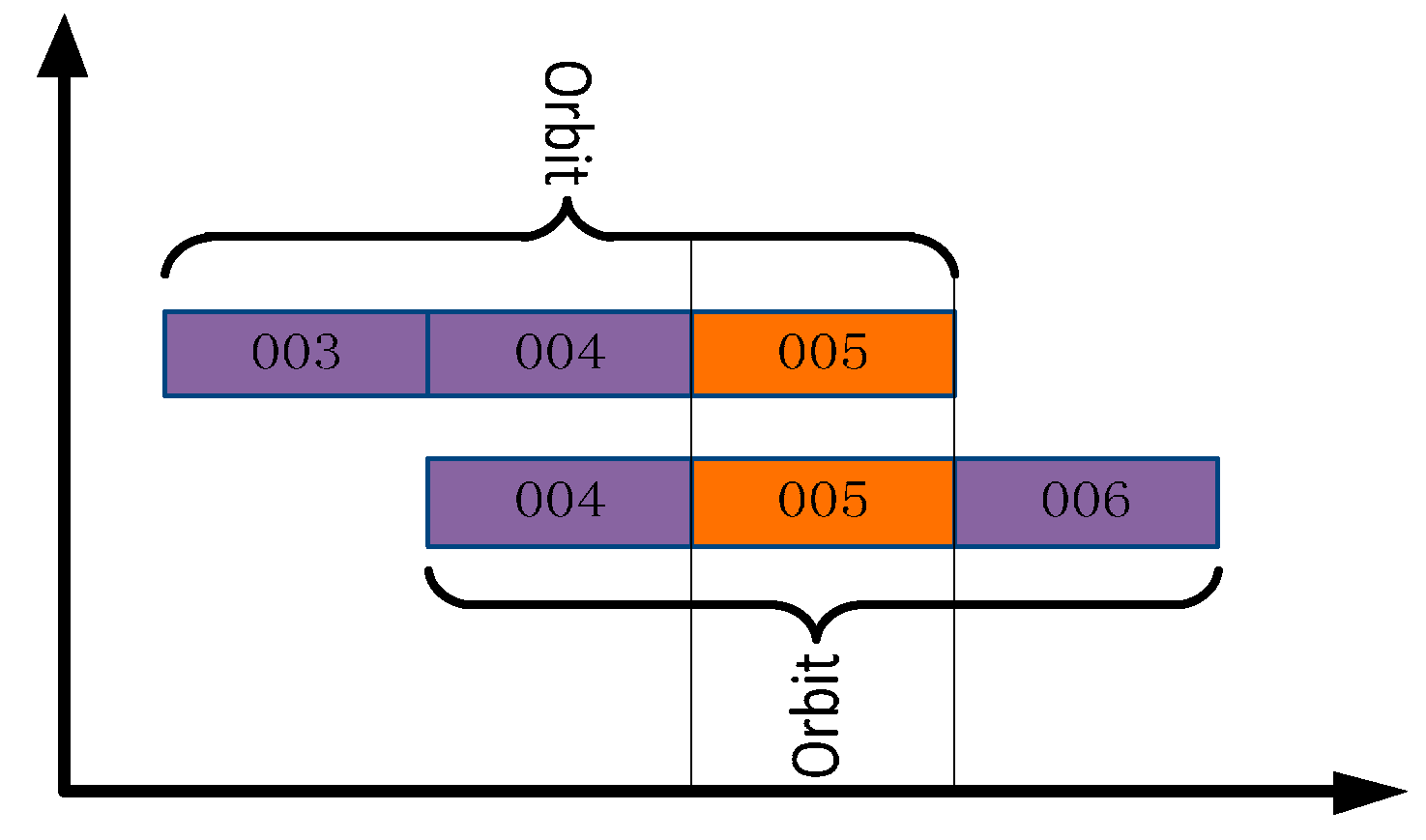
- GEO-03 precise orbit maneuvering test. In this test, the BDS measured data of 20 stations from MGEX and 10 stations from iGMAS from 3 to 6 January 2015 were used to obtain the final precision orbit using three-day long arc POD. The comparison strategy is shown in Figure 14, and the statistical results of orbit overlap comparison in radial direction, along direction, cross direction, 1D-RMS are shown in Table 5;
- (2)
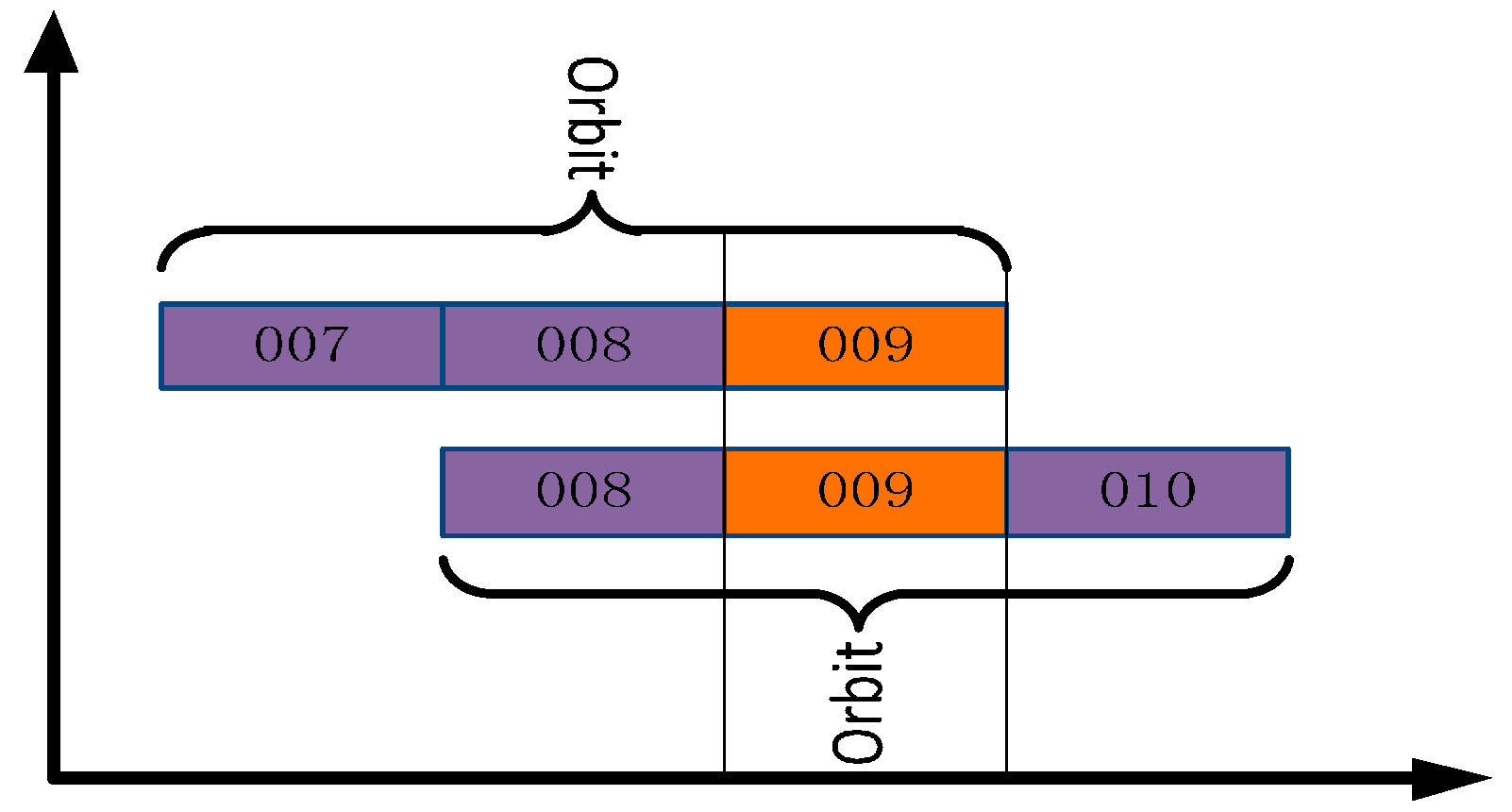
- IGSO-03 precise orbit maneuvering test. In this test, the BDS measured data from 7 to 10 January 2015 were used to obtain the final precision orbit. The comparison strategy is shown in Figure 15, and the statistical results of orbit mutual difference of overlapping arc in radial direction, along direction, cross direction, 1D-RMS are shown in Table 6;
4. Conclusions and Outlook
Acknowledgements
Author Contributions
Conflicts of Interest
References
- Yang, Y.; Li, J.; Xu, J.; Tang, J.; Guo, H.; He, H. Contribution of the compass satellite navigation system to global PNT users. Chin. Sci. Bull. 2011, 56, 2813–2819. [Google Scholar] [CrossRef]
- Camacho-Lara, S. Current and Future GNSS and Their Augmentation Systems. In Handbook of Satellite Applications; Springer: New York, NY, USA, 2013; pp. 617–654. [Google Scholar]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P.; Hugentobler, U.; Teunissen, P.; Nakamura, S. Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solut. 2013, 17, 211–222. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation global navigation satellite systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5, 8328. [Google Scholar] [CrossRef] [PubMed]
- Tan, B.; Yuan, Y.; Zhang, B.; Hsu, H.Z.; Ou, J. A new analytical solar radiation pressure model for current BeiDou satellites: IGGBSPM. Sci. Rep. 2016, 6, 32967. [Google Scholar] [CrossRef] [PubMed]
- Shi, C.; Zhao, Q.; Hu, Z.; Liu, J. Precise relative positioning using real tracking data from COMPASS GEO and IGSO satellites. GPS Solut. 2013, 17, 103–119. [Google Scholar] [CrossRef]
- Cao, F.; Yang, X.; Li, Z.; Sun, B.; Kong, Y.; Chen, L.; Feng, C. Orbit determination and prediction of GEO satellite of BeiDou during repositioning maneuver. Adv. Space Res. 2014, 54, 1828–1837. [Google Scholar] [CrossRef]
- Wang, B.; Lou, Y.; Liu, J.; Zhao, Q.; Su, X. Analysis of BDS satellite clocks in orbit. GPS Solut. 2016, 20, 783–794. [Google Scholar] [CrossRef]
- Byun, S.H. Satellite orbit determination using triple-differenced GPS carrier phase in pure kinematic mode. J. Geod. 2003, 76, 569–585. [Google Scholar] [CrossRef]
- Steigenberger, P.; Hugentobler, U.; Hauschild, A.; Montenbruck, O. Orbit and clock analysis of Compass GEO and IGSO satellites. J. Geod. 2013, 87, 515–525. [Google Scholar] [CrossRef]
- Zhao, Q.; Wang, C.; Guo, J.; Liu, X. Assessment of the Contribution of BeiDou GEO, IGSO, and MEO Satellites to PPP in Asia—Pacific Region. Sensors 2015, 15, 29970–29983. [Google Scholar] [CrossRef] [PubMed]
- Geng, T.; Su, X.; Fang, R.; Xie, X.; Zhao, Q.; Liu, J. BDS Precise Point Positioning for Seismic Displacements Monitoring: Benefit from the High-Rate Satellite Clock Corrections. Sensors 2016, 16, 2192. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Yuan, Y.; Zhang, B.; Wang, N.; Tan, B.; Chen, Y. Multi-GNSS precise point positioning (MGPPP) using raw observations. J. Geod. 2016. [Google Scholar] [CrossRef]
- Davis, T.; Baker, M.T.; Belchak, T.; Larsen, W. XSS-10 micro-satellite flight demonstration program. Proc. SPIE 2004, 5419, 16–25. [Google Scholar]
- Jacobovits, A.; Vaneck, T. AeroAstro’s Escort–a microsatellite for on-orbit inspection of space assets. In Proceedings of the 17th AIAA/USU Annual Conference on Small Satellites, SSC03-IV-7, Logan, UT, USA, 12 August 2003. [Google Scholar]
- Zhang, J.; Chen, F.; Fu, Q.; Xiao, H. Moving Target Recognition Based on HMM. J. Natl. Univ. Def. Technol. 2003, 25, 51–55. [Google Scholar]
- Che, R.; Zhang, H. Relative Orbit Design of a Chaser Tracking a Non-cooperative Target in Space. Aerosap. Control 2006, 24, 40–45. [Google Scholar]
- Liu, Y.; Chang, Z.; He, F.; Guo, R. GEO Satellite Abnormity Recognition Based on Wavelet Analysis. J. Geod. Geodyn. 2010, 30, 73–76. [Google Scholar]
- Yan, X.; Huang, G.; Zhang, R.; Zhang, Q. A Method Based on Broadcast Ephemeris to Detect BDS Satellite Orbital Maneuver. J. Navig. Position 2015, 3, 35–38. [Google Scholar]
- Yuan, Y.; Ou, J. Auto-covariance estimation of variable samples (ACEVS) and its application for monitoring random ionospheric disturbances using GPS. J. Geod. 2001, 75, 438–447. [Google Scholar] [CrossRef]
- Stigler, S.M. Do robust estimators work with real data? Ann. Stat. 1977, 5, 1055–1098. [Google Scholar] [CrossRef]
- Rousseeuw, P.J. Least median of squares regression. J. Am. Stat. Assoc. 1984, 79, 871–880. [Google Scholar] [CrossRef]
- Rousseeuw, P.J.; Wagner, J. Robust regression with a distributed intercept using least median of squares. Comput. Stat. Data Anal. 1994, 17, 65–76. [Google Scholar] [CrossRef]
- Yang, Y. Robust estimation of geodetic datum transformation. J. Geod. 1999, 73, 268–274. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, J. GNSS receiver autonomous integrity monitoring (RAIM) algorithm based on robust estimation. Geod. Geodyn. 2016, 7, 117–123. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method One (New Method) | Method Two (Conventional Method) | The Health Flag of Broadcast Ephemeris | Precise Orbit Products of GFZ | O-C Value at WUH1 |
|---|---|---|---|---|
| Maneuvering | Maneuvering | Unhealthy | No GEO-03 | There is a jump |
| Method One (New Method) | Method Two (Conventional Method) | The Health Flag of Broadcast Ephemeris | Precise Orbit Products of GFZ | O-C Value at BJF1 |
|---|---|---|---|---|
| Anomalies | Anomalies | Healthy | No IGSO-03 | There is a jump |
| Method One (New Method) | Method Two (Conventional Method) | The health flag of Broadcast Ephemeris | Precise Orbit Products of GFZ | O-C Value at BJF1 |
|---|---|---|---|---|
| Maneuvering | Maneuvering | Unhealthy | No IGSO-03 | There is a jump |
| Method One (New Method) | Method Two (Conventional Method) | The Health Flag of Broadcast Ephemeris | Precise Orbit Products of GFZ | O-C Value at BJF1 |
|---|---|---|---|---|
| Anomalies | Anomalies | Healthy | Have GEO-01 | There is a jump |
| Satellite | PRN | Radial | Along | Cross | 1D-RMS |
|---|---|---|---|---|---|
| GEO-01 | 1 | 0.1389 | 0.2016 | 0.1695 | 0.2634 |
| GEO-02 | 2 | 1.4875 | 1.7481 | 0.2402 | 2.3079 |
| GEO-03 | 3 | 0.7614 | 1.8901 | 0.3392 | 2.0657 |
| GEO-04 | 4 | 0.1435 | 0.3520 | 0.0743 | 0.3873 |
| GEO-05 | 5 | 0.1576 | 0.4225 | 0.2662 | 0.5236 |
| IGSO-01 | 6 | 0.0828 | 0.1644 | 0.1258 | 0.2230 |
| IGSO-02 | 7 | 0.1170 | 0.2529 | 0.7386 | 0.7894 |
| IGSO-03 | 8 | 0.1570 | 0.4986 | 0.4792 | 0.7091 |
| IGSO-04 | 9 | 0.0787 | 0.0916 | 0.1428 | 0.1870 |
| IGSO-05 | 10 | 0.0722 | 0.2861 | 0.6542 | 0.7177 |
| Satellite | PRN | Radial | Along | Cross | 1D-RMS |
|---|---|---|---|---|---|
| GEO-01 | 1 | 0.0554 | 0.0783 | 0.0458 | 0.1063 |
| GEO-02 | 2 | 0.0686 | 0.1772 | 0.1112 | 0.2202 |
| GEO-03 | 3 | 0.0940 | 0.1030 | 0.0776 | 0.1596 |
| GEO-04 | 4 | 0.0288 | 0.1301 | 0.0370 | 0.1383 |
| GEO-05 | 5 | 0.0565 | 0.0530 | 0.1104 | 0.1349 |
| IGSO-01 | 6 | 0.0328 | 0.1201 | 0.3887 | 0.4082 |
| IGSO-02 | 7 | 0.1074 | 0.1651 | 0.5064 | 0.5434 |
| IGSO-03 | 8 | 0.4460 | 0.3687 | 0.2069 | 0.6145 |
| IGSO-04 | 9 | 0.0775 | 0.1115 | 0.5155 | 0.5331 |
| IGSO-05 | 10 | 0.0935 | 0.0888 | 0.0943 | 0.1598 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, F.; Yuan, Y.; Tan, B.; Ou, J. A Robust Method to Detect BeiDou Navigation Satellite System Orbit Maneuvering/Anomalies and Its Applications to Precise Orbit Determination. Sensors 2017, 17, 1129. https://doi.org/10.3390/s17051129
Ye F, Yuan Y, Tan B, Ou J. A Robust Method to Detect BeiDou Navigation Satellite System Orbit Maneuvering/Anomalies and Its Applications to Precise Orbit Determination. Sensors. 2017; 17(5):1129. https://doi.org/10.3390/s17051129
Chicago/Turabian StyleYe, Fei, Yunbin Yuan, Bingfeng Tan, and Jikun Ou. 2017. "A Robust Method to Detect BeiDou Navigation Satellite System Orbit Maneuvering/Anomalies and Its Applications to Precise Orbit Determination" Sensors 17, no. 5: 1129. https://doi.org/10.3390/s17051129
APA StyleYe, F., Yuan, Y., Tan, B., & Ou, J. (2017). A Robust Method to Detect BeiDou Navigation Satellite System Orbit Maneuvering/Anomalies and Its Applications to Precise Orbit Determination. Sensors, 17(5), 1129. https://doi.org/10.3390/s17051129