
Platform Architecture for Decentralized Positioning Systems

Abstract
:1. Introduction
- The proposition of a layer- and modular-based architecture, which enables the calculation of the localization on-the-fly on the MS. The position is computed on low-cost and resource-constrained devices such as microcontrollers. The proposed platform is non-proprietary and open, since it can be easily extended with other sensors, in order to enable the implementation of positioning systems based on other technologies. The proposed platform can interoperate with existing systems and protocols such as 6LoWPAN.
- We propose a preprocessing method to remove outliers in measured data, which is convenient for resource-constrained devices, especially in terms of limited stack memory.
- We introduce a method that calculates the 3D position based on the Singular Value Decomposition (SVD).
- We propose a pre-processed method for the localization calculation, avoiding the execution of memory and computationally-expensive algorithms such as the SVD or Moore–Penrose, on resource-constrained devices.
- We also demonstrate the feasibility to deploy the Moore–Penrose algorithm, which is based on SVD, on resource-constrained devices.
- In order to improve the position estimate, we use the Gauss–Newton, as well as the Levenberg– Marquardt algorithms, which are derived in convenient form for resource-constrained devices.
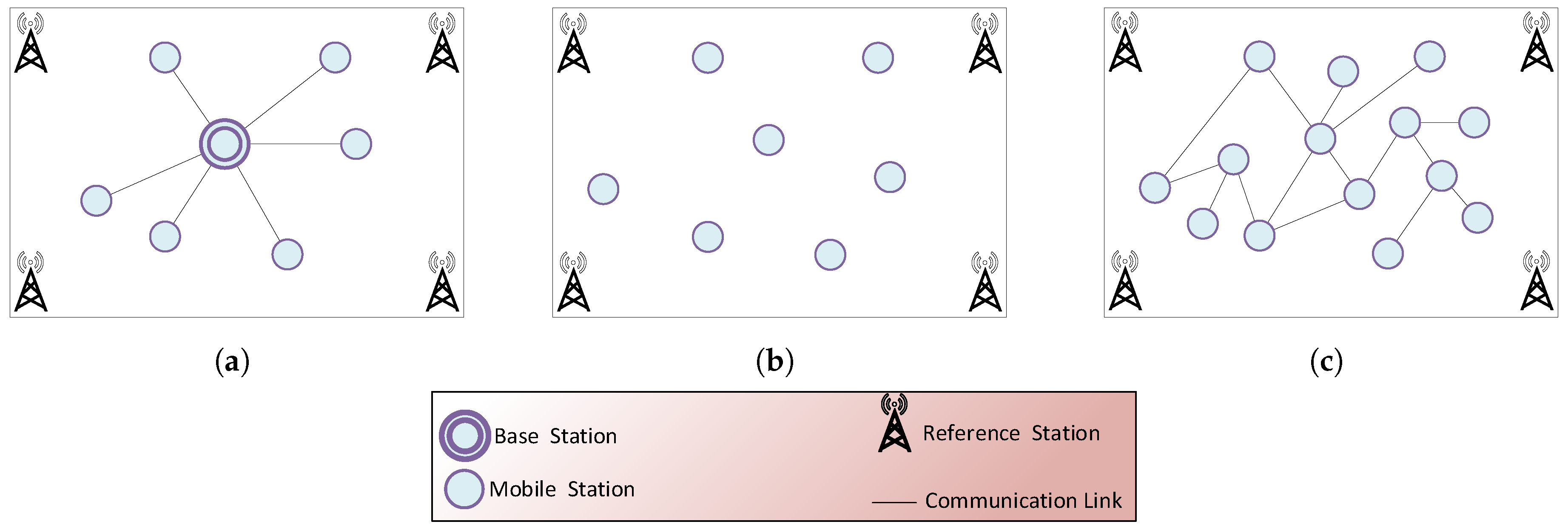
2. Architectural Overview of Localization Systems
3. Related Work
3.1. Centralized Indoor Localization Systems
3.2. Decentralized Indoor Localization Systems
3.3. Distributed and Cooperative Localization Systems
3.4. Standards for Localization
4. General Architecture of a Platform for Positioning Systems
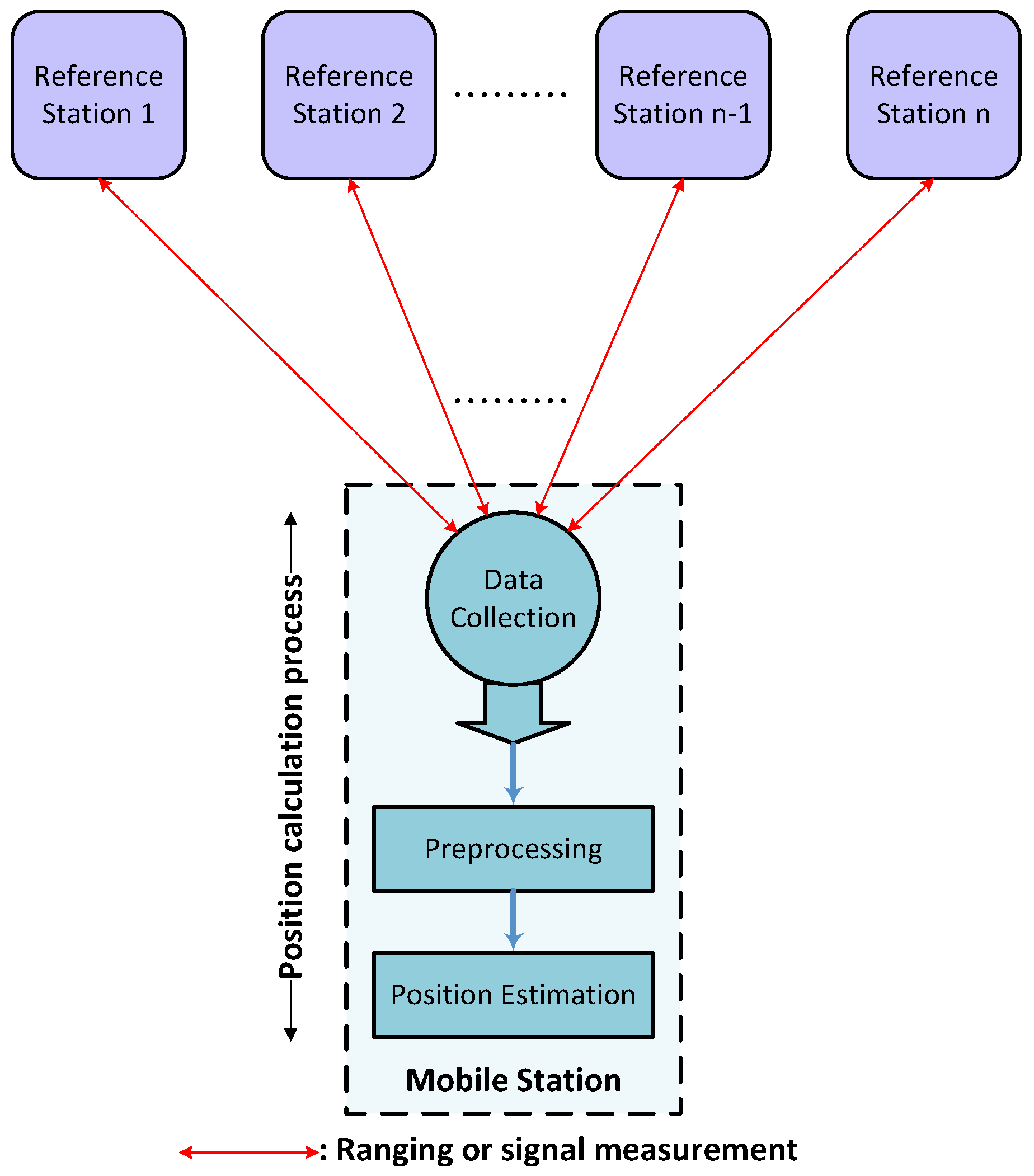
4.1. System Interaction and Components
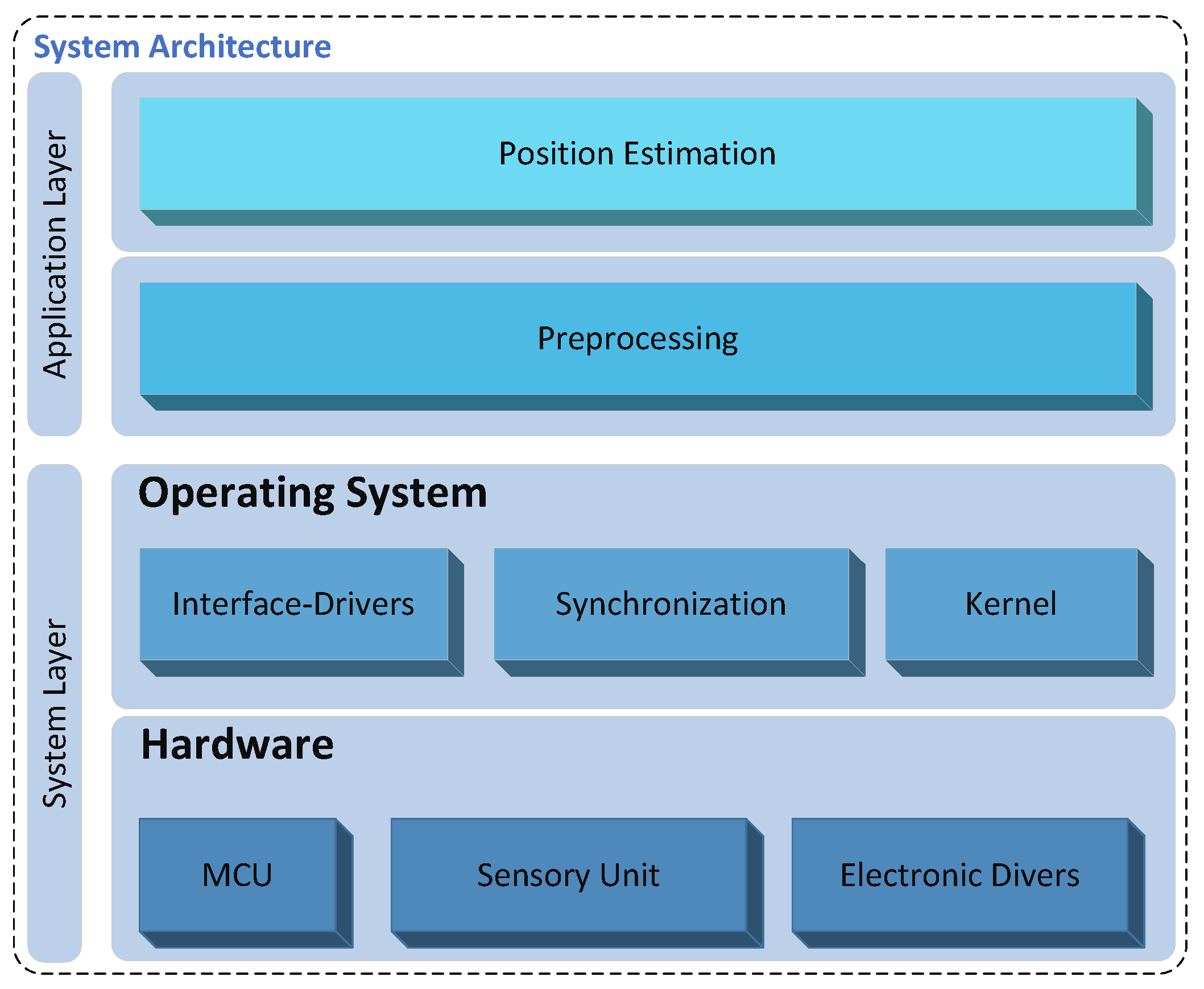
4.2. System Layer of the Mobile Station
4.2.1. Hardware Layer
4.2.2. Operating System Layer
4.2.3. Operating System for Microcontroller
- i
- kernel structure, which can follow a monolithic model, layered approach or microkernel paradigm,
- ii
- the scheduler and
- iii
- the programming model [40].
4.3. Application Layer
4.3.1. Preprocessing
4.3.2. Position Estimation
- (a)
- Measurement methods:The common measurement methods are based on signal strength, angular or distance observations, such as Received Signal Strength (RSS), Angle of Arrival (AoA) or Time of Arrival (ToA). The ToA is the most popular measurement technique, which can be estimated by using various ranging techniques, such as the one-way or two-way ToA, and Time Difference of Arrival (TDoA) [51]. Additionally, hybrid measurements can be used for the positioning, such as TDoA/AoA [52] or ToA/RSS [53].
- (b)
- Performance metrics:The performance of a positioning algorithm can be evaluated by the following metrics: accuracy, precision, complexity, robustness, scalability, resilience to error and noise, coverage and cost [15].
- Accuracy metrics: The localization accuracy metric shows how well the ground truth and estimated positions match. There are a number of accuracy metrics such as the Root Mean Square Error (RMSE), the Cumulative Distribution Function (CDF), the Probability Density Function (PDF) or the Frobenius metric (FROB) [54].
- Cost metrics: A practical evaluation criterion is the cost of an algorithm, which is often a trade-off against accuracy. Common cost metrics are: algorithm complexity, convergence time, power consumption, reference to node ratio [55].
4.3.3. Positioning Algorithms
5. Examples of a Platform for Positioning Systems
5.1. UWB-Based Positioning System
5.1.1. System Layer of the UWB-Based Mobile Station
- (a)
- Hardware:The hardware comprises four subsystems: the power unit supplying the sensor board with energy, the Microcontroller Unit (MCU), the sensory unit and the driver circuits (see Figure 7). The hardware layer is implemented based on the STM32F4, ARM Cortex-M4 core operating at 168 MHz and the UWB module P440 ranging sensor from TIME DOMAIN®, which enables ranging measurements with an accuracy of a few centimeters. The properties of the used MCU and the UWB ranging sensor are summarized in the Table 2 and Table 3, respectively.
- (b)
- Operating system:We use the RIOT-OS [61], which is an open-source IoT operating system developed at the “Freie Universität Berlin”. RIOT-OS is based on a microkernel architecture, which was deployed for a rescue scenario to track and monitor fire fighters. In order to fulfill severe real-time requirements for hard industrial or emergency scenarios, the micro-kernel provides a zero-latency interrupt handling and prioritized threads with a minimum context-switching time. RIOT-OS implements a tickless scheduler, in order to achieve a maximum energy savings and to support deep-sleep mode by all resource-constrained MCUs. Furthermore, the RIOT-OS supports the 6LoWPAN and the IPv6 protocols, which enables the interoperability with existing systems and protocols [62]. Based on the architecture of the RIOT-OS, we developed and integrated device drivers for the P440 ranging sensor and the UART controller. These software driver components build the driver module and are part of the system layer (cf. Figure 6).
5.1.2. Application Layer of the UWB-Based Mobile Station
- (a)
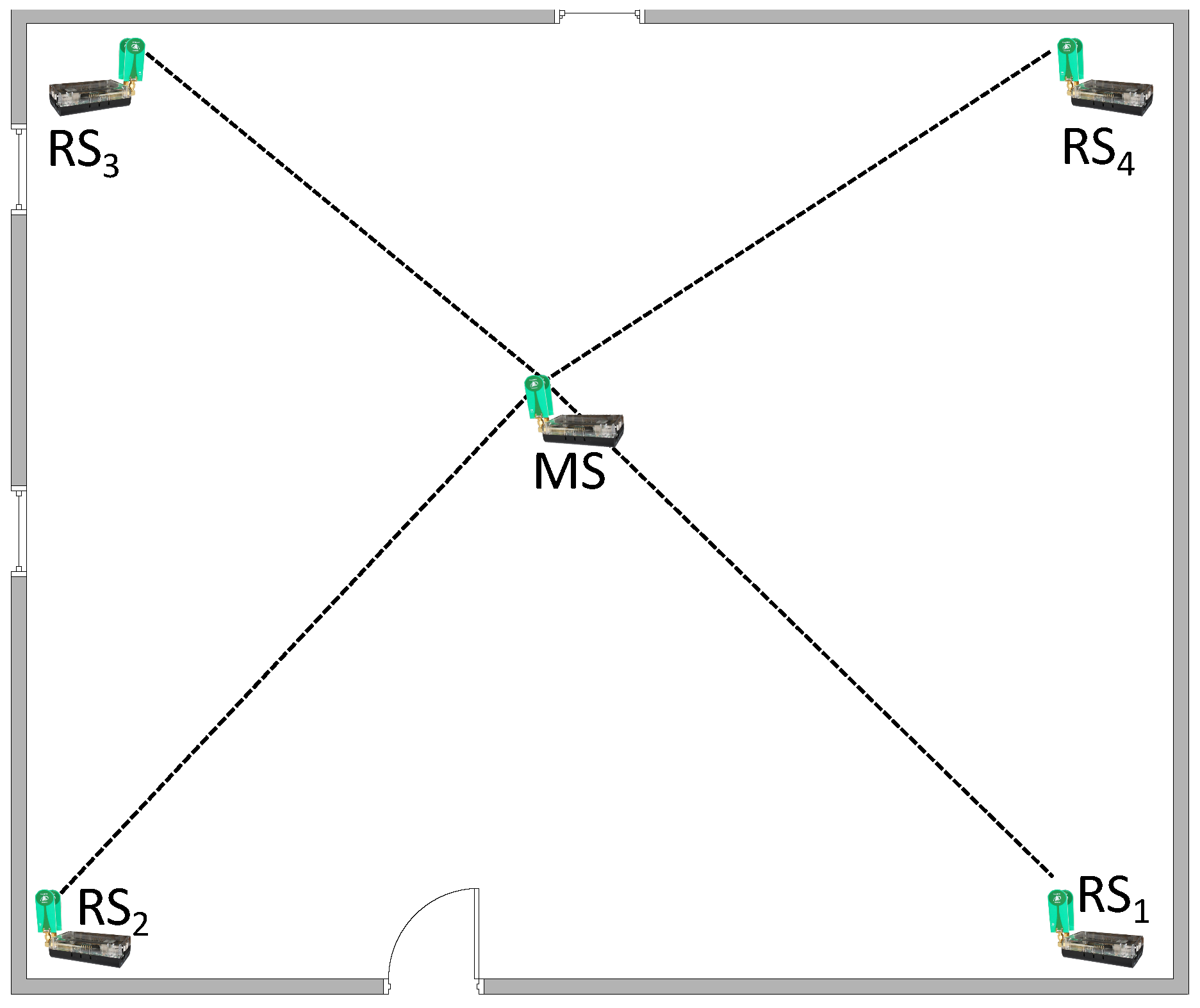
- Algebraic multilateration method:Assume and for are the coordinates of the MS and of n reference points, respectively. In addition, the measured distances between the reference points and the MS are . The unknown location of the MS is the intersection of the spheres, whose equations are:The system of nonlinear equations in (1) can be solved by different methods [48,65,66,67]. We solved it by transforming the system of equations into a matrix form [68]. The algorithm used is not related to a specific anchor, since most algorithms subtract the coordinates of a specific anchor for the linearization of the equation system. Additionally, the algorithm gives a measure of the solvability of the multilateration problem and provides a recursive least square approach to update the position [68]. The solution of the linearized system is completely determined if the distances from four reference points are known. The problem requires the estimation of the unknown position such that:where the matrix and the vector have the following forms [68]:Equation (2) can be solved based on the QR decomposition in the microcontroller. An efficient method to implement the QR decomposition is the Householder transformation [69]. If is ill-conditioned or singular, the position can be computed by using the Moore–Penrose pseudo-inverse algorithm [68,69]. The pseudo-inverse is the best linear reconstruction operator in the mean square sense [70], which is more robust and reliable than the Householder transformation, but substantially more computationally expensive:whereby is the pseudo-inverse of the matrix [68,69]. The pseudo-inverse matrix can be computed based on the SVD of the matrix [71]. SVD enables the calculation of the underdetermined and overdetermined systems of linear equations. Furthermore, the SVD is more robust to numerical errors [72], but it is computationally expensive.
- (b)
- Preprocessed pseudo-inverse matrix:Since the matrix in (3) depends only on the coordinates of the RSs, the constant matrix () can be computed externally, e.g., in a PC. This method enables saving the resources of the MS, which can be initialized with the matrix for, e.g., with the help of a serial communication. In this case, the computation of a new position in Equation (2) is reduced to a matrix multiplication: .
- (c)
- Non-linear least squares method: Gauss–Newton method:The algebraic multilateration method does not always provide a good estimation due to the measurement uncertainties [68]. In this case, the NLS method can be used to improve the position calculated from the algebraic multilateration method. This method is based on the minimization of the squares of the errors:whereby is the error function:Minimizing the sum of the square errors is a common problem in the area of applied mathematics, which can be solved, for instance, with the Gauss–Newton or the Levenberg–Marquardt algorithms [73]. We use the Gauss–Newton method to improve the estimated position, which is calculated by using the pseudo-inverse algorithm.Since the Gauss–Newton method requires the first derivatives, we define the following Jacobian matrix:We introduce the error function vector :Starting by an initial position guess calculated from the algebraic multilateration method, the Gauss–Newton method proceeds by the following iterations:where is the k-th approximation of the position and is the k-th error correction vector. We calculate by using the Moore–Penrose pseudo-inverse algorithm, since the QR-decomposition, such as the QR-Householder algorithm, can fail due to the singularity or bad conditioning of the matrices.Equations (12) and (13) are composed of sum terms, which can be implemented in the microcontroller, for example by the use of a for-loop; whereby, the upper bound of the loop is n, which is equal to the reference point’s number. The matrix in Equation (12) is symmetrical; this property can be used to reduce the computational burden by computing only the upper or lower part of the matrix. Finally, the terms and , which appear in each sum term of the matrix elements, can be computed only once by each iteration in Equations (12) and (13), respectively.
5.2. Magnetic Field-Based Positioning System
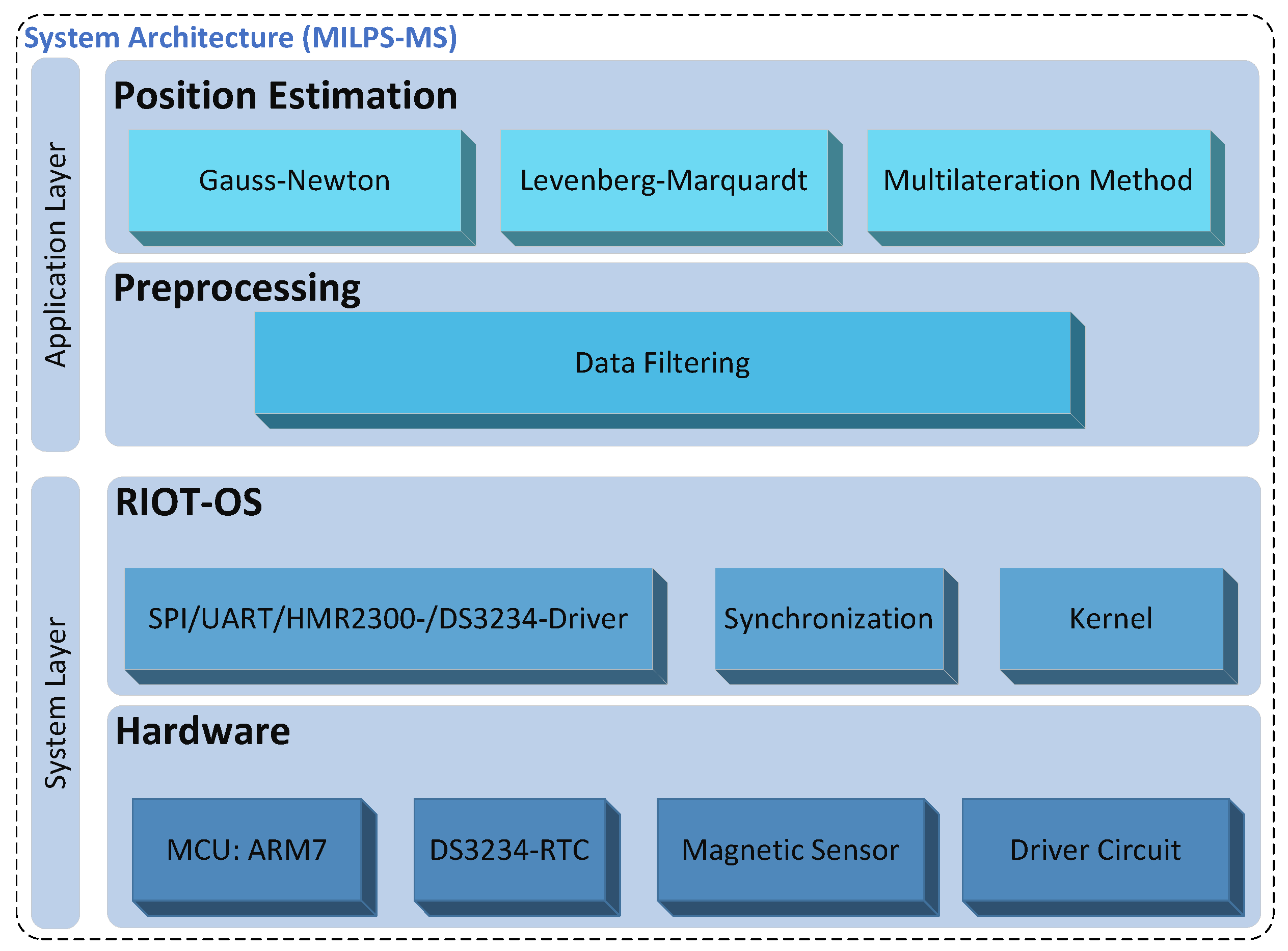
5.2.1. System Layer of MILPS
- (a)
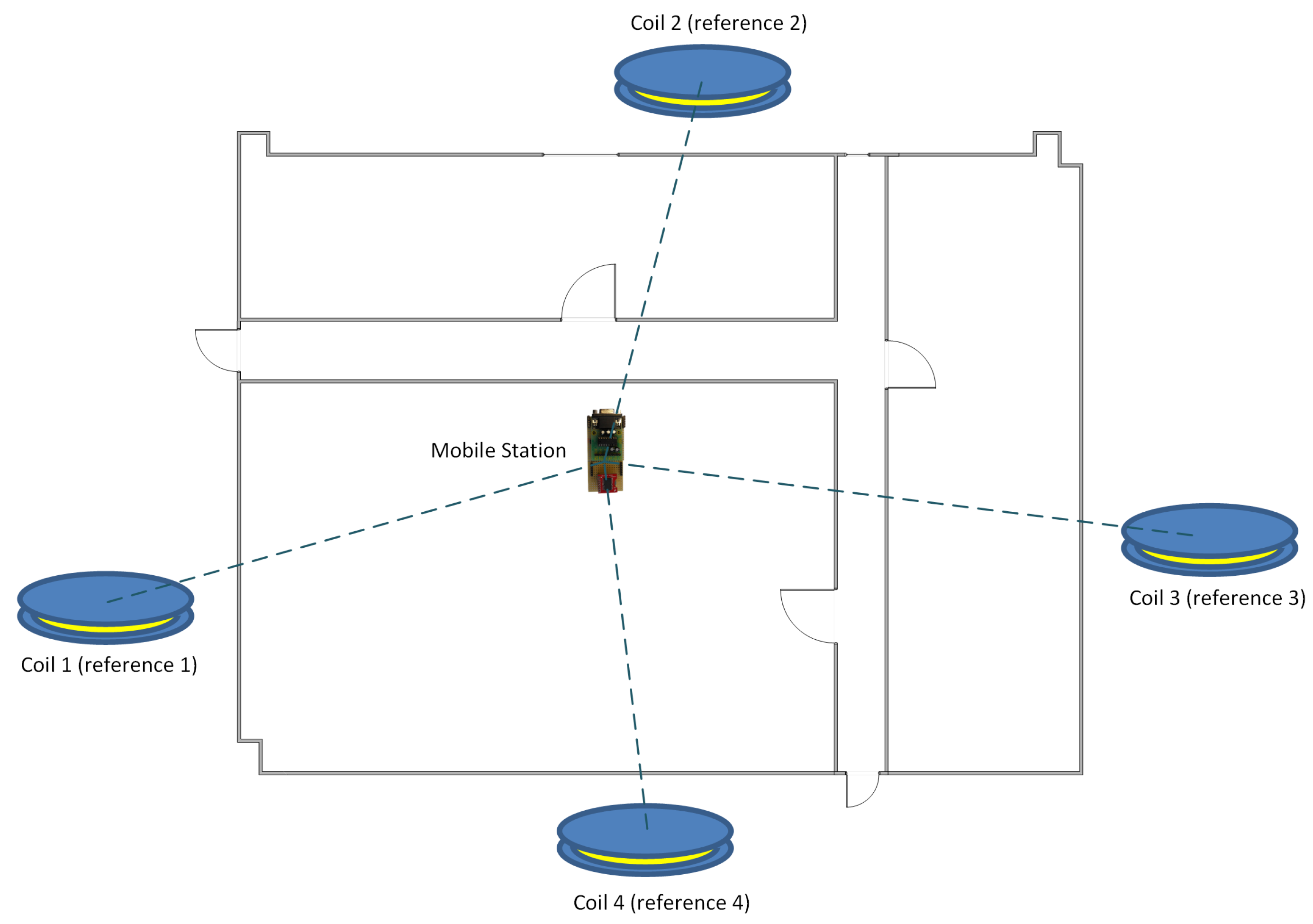
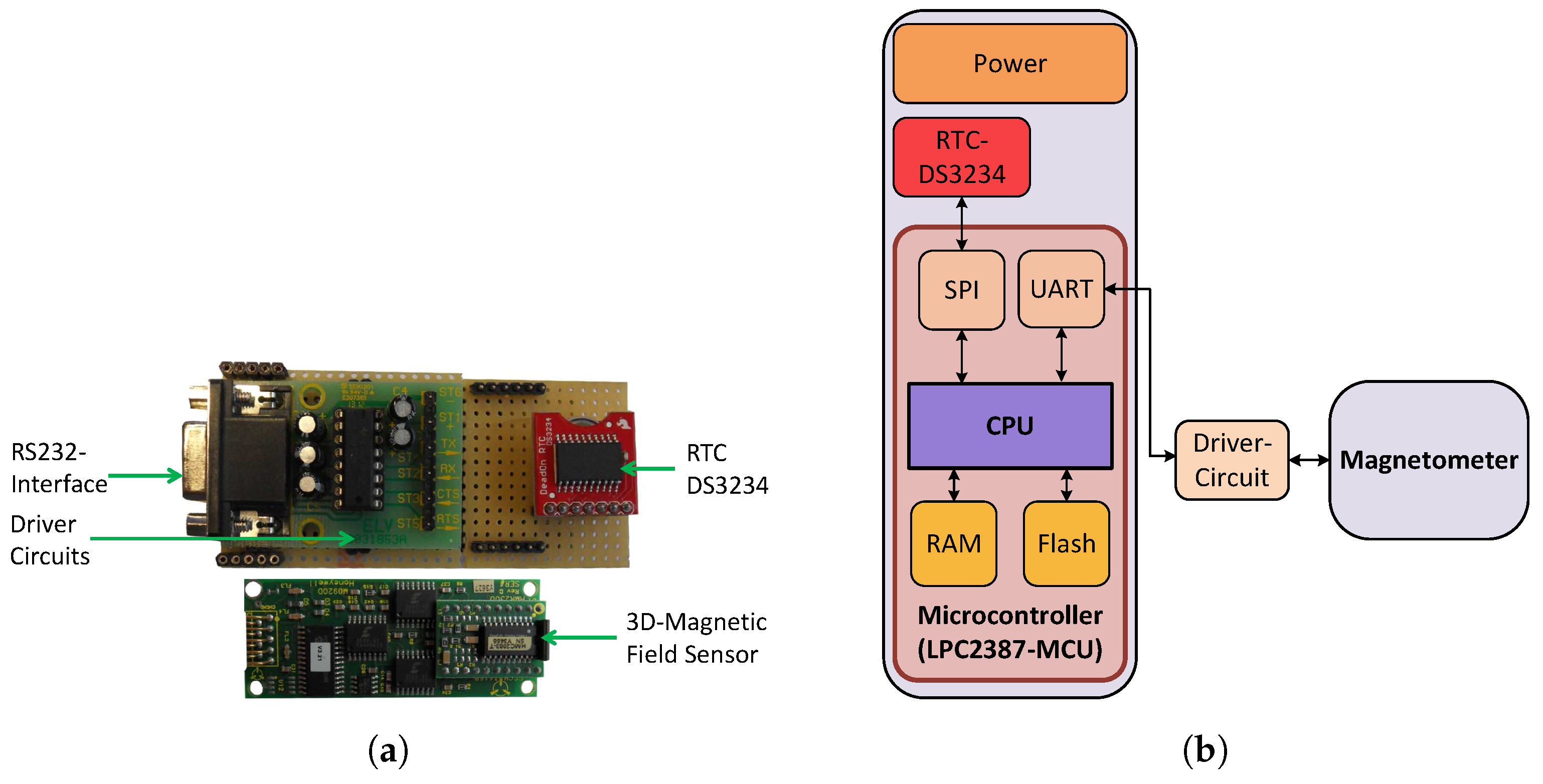
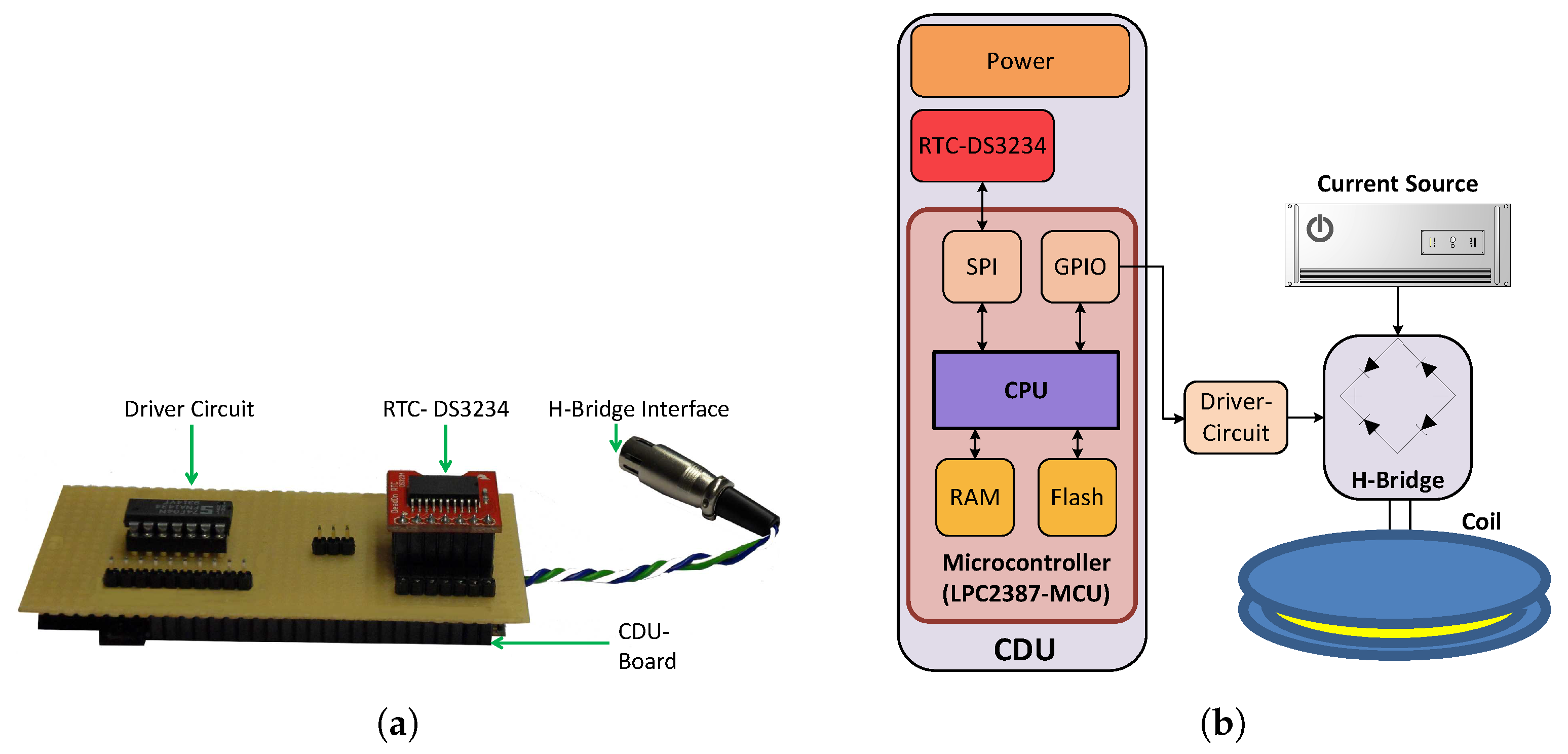
- Hardware:The MILPS has a similar hardware architecture as the UWB-based localization system described before; therefore, the hardware of the MS comprises four subsystems: the power unit, the Microcontroller Unit (MCU), the sensory unit and the driver circuits. The hardware layer is implemented with the LPC2387 ARM7 core (see Table 4). The sensory unit of the MS includes the 3D-magnetic sensor HMR2300, which offers a range of G [75]. The properties of the used HMR2300 magnetometer are summarized in Table 5. Furthermore, the hardware sublayer of the MS incorporates the DS3234 RTC in order to synchronize the gathered magnetic data, which are generated from the coils. The hardware of the MS is illustrated in Figure 10.Each coil is driven via a Control Driver Unit (CDU), which includes a LPC2387-MCU, an RTC and a driver circuit. The driver circuit enables the CDU to interface with an H-bridge, in order to control the voltage polarity. Figure 11 illustrates the CDU, as well as the control of the coils.
- (b)
- Operating system:Based on the architecture of the RIOT-OS, we developed and integrated the device drivers for the DS3234 real-time clock and the HMR2300 magnetometer. These software driver components are part of the SL (cf. Figure 9). A decentralized synchronization mechanism enables periodic control of the coils and the MS using the Time Division Multiple Access (TDMA) scheme. At the initialization phase, the RTCs of the MS and the coils are set to the same time. In the operating mode, the coils are activated in fixed duration slots, which are cyclically organized. Simultaneously, the MS gathers the magnetic data from the magnetometer, which can be assigned to the source coils based on the predefined time slots [6].
5.2.2. Application Layer of MILPS
- (a)
- Algebraic multilateration method:In the two-dimensional case (2D), when the coil i and the magnetometer lay on the same horizontal plane, is equal to zero. Thus, (14) is reduced to the following equation:The position of the MS is computed by using the algebraic multilateration method [68], based on the distances to n coils, calculated according to:In the general three-dimensional case (3D), the unknown elevation angles can be estimated by using a three-axis accelerometer, which enables the measurement of the pitch angle and the roll angle of the MS [74]. Based on the measured pitch and roll angles, the elevation angles between the MS and reference stations can be calculated as follows:whereby is the inclination of the magnetic field from coil i, which is calculated using:where , and are the magnetic field components in the coordinate system of the sensor, which is integrated in the MS, and is the magnetic field magnitude. Hence, the distances between the MS and the reference stations can be calculated based on the estimated elevation angles :In this case, the position of the MS can also be calculated by using the algebraic multilateration algorithm. Therefore, similar to the UWB-based localization system, the pseudo-inverse matrix can be processed in a computing unit such as a PC or a laptop, in order to initialize the MCU with the preprocessed result. In this way, the MCU has only to compute a matrix multiplication, in order to estimate an MS’s position.
- (b)
- Gauss–Newton algorithm:Based on (16), the coordinates of the MS can be computed by solving the following nonlinear system of equations:whereby, , ; and are the coordinates of the i-th coil and the MS, respectively. is the measured magnetic field strength.For simplicity, we set ; the Gauss–Newton algorithm iteratively finds the best estimate , which minimizes the sum of squares:The Gauss–Newton method starts with an initial guess calculated by the direct method and proceeds iteratively (see Equation (10)) [73,78]; where is the Jacobian matrix of the function at . The Jacobian matrix is calculated based on Equation (20) to:whereby, , and are respectively equal to:and:where , , and .The iteration process stops when the updates become sufficiently small. Furthermore, the initial guess is calculated by using the algebraic multilateration method and the distances as described in the first method. Similar to the UWB-based ILS, the Gauss–Newton algorithm uses the Moore–Penrose to calculate the error correction in (10), as well as to choose the with the minimum error value.
- Levenberg–Marquardt method:The Levenberg–Marquardt method is also an algorithm for solving the NLS problems that is based on the trust-region approach [73]. The advantage of the trust-region strategy is the stability against the rank-deficiency of the Jacobian matrix , which is one of the weaknesses of the Gauss–Newton method [73]. Like the Gauss–Newton method, the Levenberg–Marquardt method proceeds iteratively (see Equation 10), whereby the error correction vector is equal to:where is the identity matrix and is the damping parameter. The error vector is calculated by using the QR-Householder instead of the Moore–Penrose pseudo-inverse algorithm, since it is less computing time consuming, and the Levenberg–Marquardt method is robust against the rank-deficiency of the Jacobian matrix .The initial damping-parameter can be calculated based on the matrixas follows:where are the diagonal elements of the matrix and is chosen by the user. As a rule of thumb, a small value of should be chosen (e.g., ), if the initial guess is believed to be a good approximation; otherwise, or can be used. Furthermore, the value of can be updated based on the gain ratio [80]:where by (e.g., , ).
6. Experimental Evaluation
6.1. Complexity of the Algorithms Used
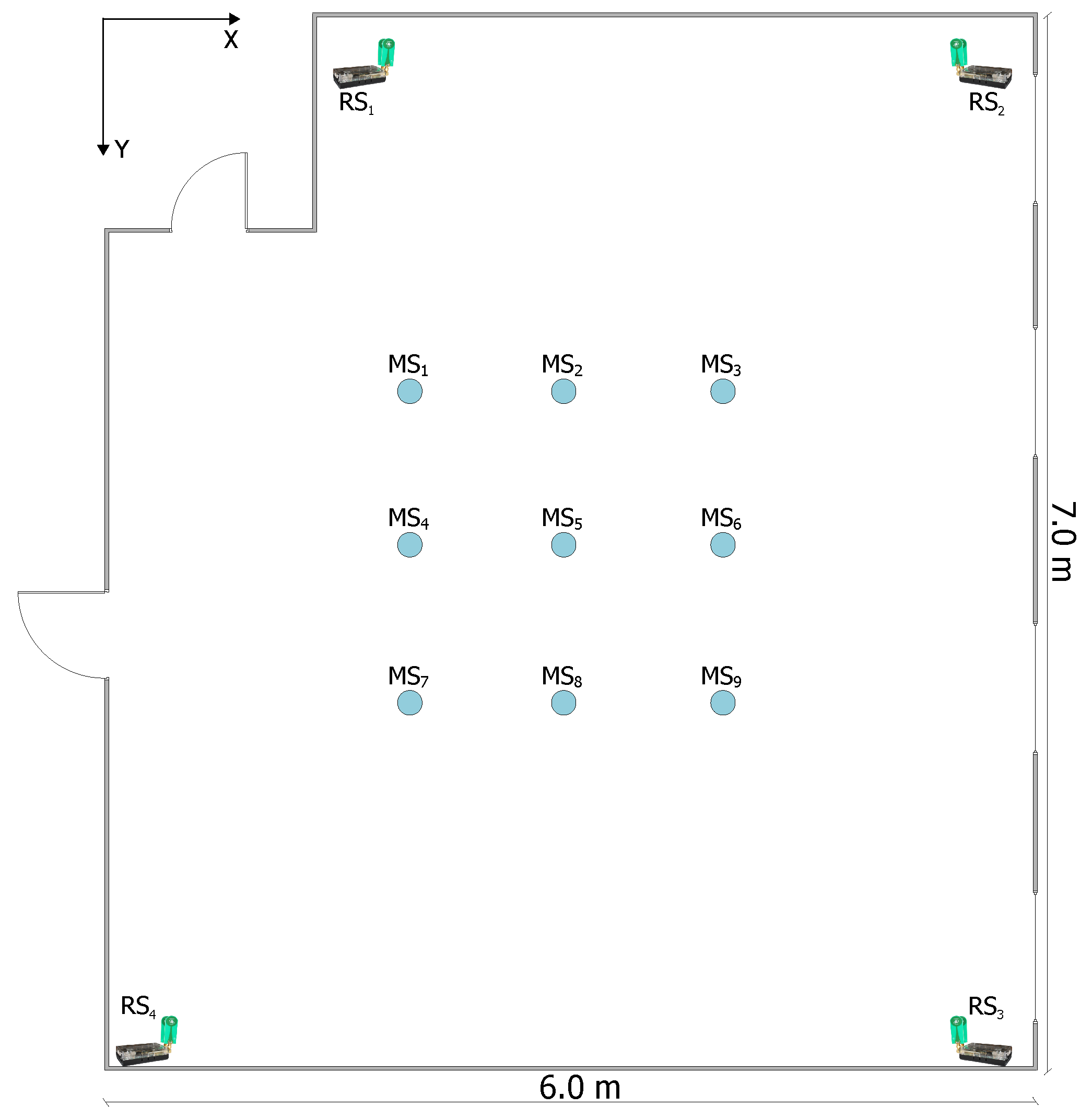
6.2. UWB-Based Localization System Evaluation
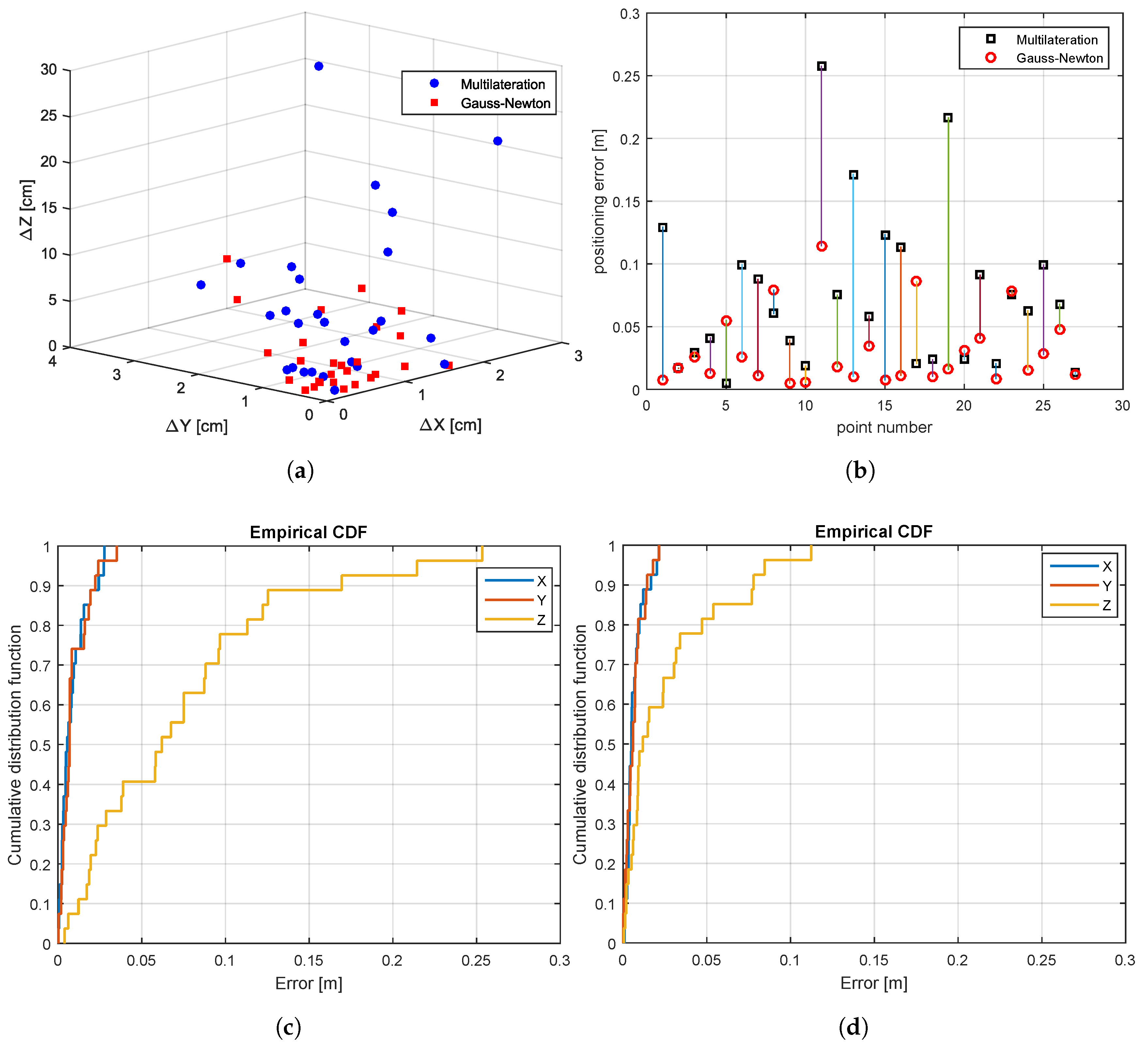
6.2.1. Accuracy Evaluation
6.2.2. Computing Time Measurement
6.3. MILPS Evaluation
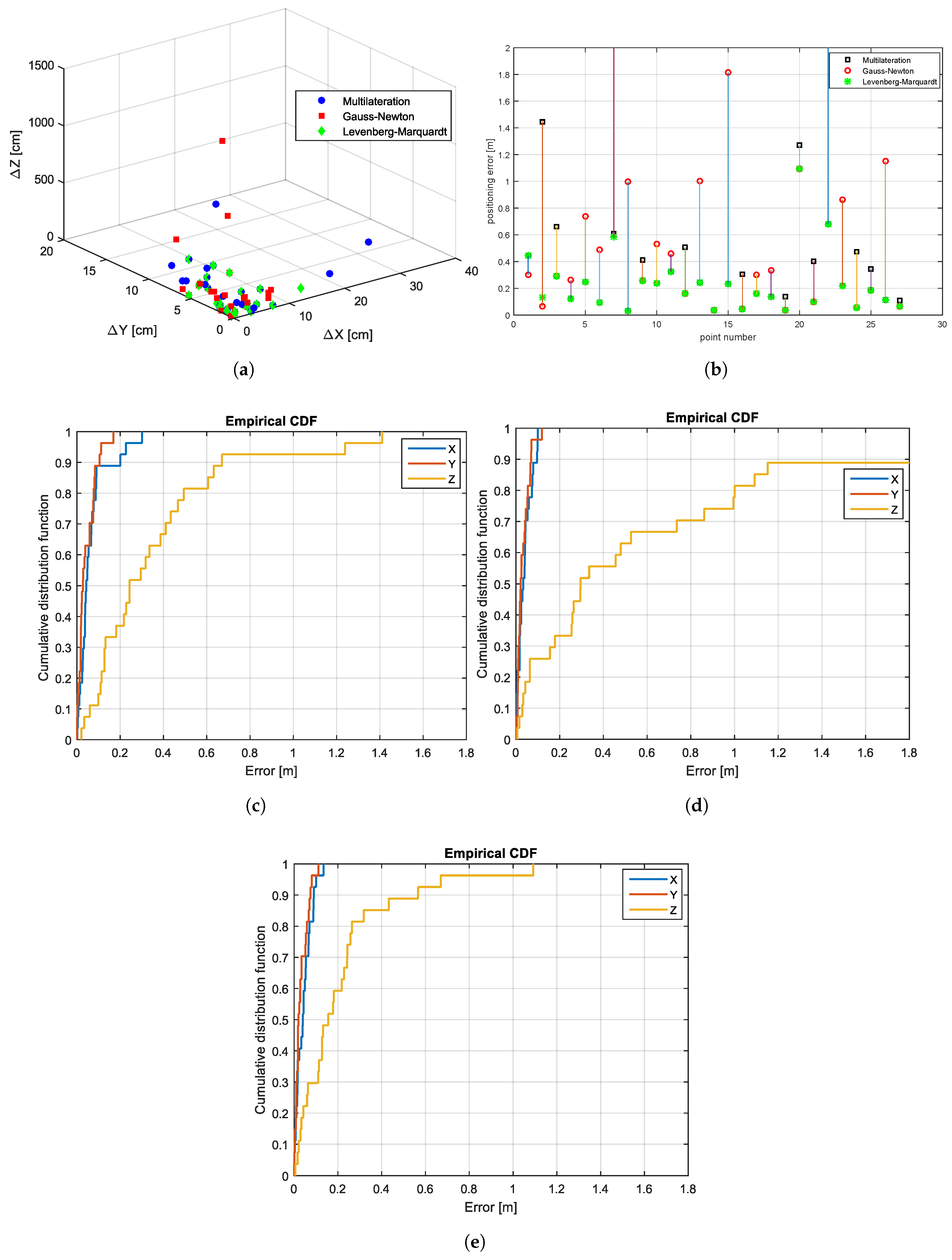
6.3.1. Accuracy Measurement
6.3.2. Computing Time Measurement
6.4. Energy Consumption
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mautz, R. Indoor Positioning Technologies; ETH Zurich, Department of Civil, Environmental and Geomatic Engineering, Institute of Geodesy and Photogrammetry: Zurich, Switzerland, 2012. [Google Scholar]
- Werner, M.; Kessel, M.; Marouane, C. Indoor positioning using smartphone camera. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Centro Cultural Vila Flor, Guimaraes, Portugal, 21–23 September 2011; pp. 1–6. [Google Scholar]
- Zhao, Y.G.; Cheng, W.; Jia, L.; le Ma, S. The Obstacle Avoidance and Navigation Based on Stereo Vision for Mobile Robot. In Proceedings of the 2010 International Conference on Optoelectronics and Image Processing (ICOIP), Haiko, China, 11–12 November 2010; Volume 2, pp. 565–568. [Google Scholar]
- Desouza, G.N.; Kak, A.C. Vision for mobile robot navigation: A survey. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 237–267. [Google Scholar] [CrossRef]
- Mahfouz, M.R.; Fathy, A.E.; Kuhn, M.J.; Wang, Y. Recent trends and advances in UWB positioning. In Proceedings of the IEEE MTT-S International Microwave Workshop on Wireless Sensing, Local Positioning (IMWS 2009) and RFID 2009, Cavtat, Croatia, 24–25 September 2009; pp. 1–4. [Google Scholar]
- Kasmi, Z.; Norrdine, A.; Blankenbach, J. Towards a Decentralized Magnetic Indoor Positioning System. Sensors 2015, 15, 29799. [Google Scholar] [CrossRef] [PubMed]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications (PerCom 2003), Fort Worth, TX, USA, 23–26 March 2003; pp. 407–415. [Google Scholar]
- Zhao, Y.; Smith, J.R. A battery-free RFID-based indoor acoustic localization platform. In Proceedings of the 2013 IEEE International Conference on RFID (RFID), Johor Bahru, Malaysia, 4–5 September 2013; pp. 110–117. [Google Scholar]
- Bouet, M.; dos Santos, A.L. RFID tags: Positioning principles and localization techniques. In Proceedings of the 2008 1st IFIP Wireless Days, Dubai, UAE, 24–27 November 2008; pp. 1–5. [Google Scholar]
- Zhang, Y.; Li, X.; Amin, M. Principles and Techniques of RFID Positioning. In RFID Systems; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2010; pp. 389–415. [Google Scholar]
- Hol, J.D.; Dijkstra, F.; Luinge, H.; Schon, T.B. Tightly coupled UWB/IMU pose estimation. In Proceedings of the 2009 IEEE International Conference on Ultra-Wideband, Vancouver, BC, Canada, 9–11 September 2009; pp. 688–692. [Google Scholar]
- Zekavat, R.; Buehrer, R.M. Handbook of Position Location: Theory, Practice and Advances, 1st ed.; Wiley-IEEE Press: Hoboken, NJ, USA, 2011. [Google Scholar]
- Yamaguchiy, H.; Higuchi, T.; Higashino, T. Collaborative Indoor Localization of Mobile Nodes. In Proceedings of the International Conference on Mobile Computing and Ubiquitous (ICMU2012), Okinawa, Japan, 23–25 May 2012; pp. 156–163. [Google Scholar]
- Kivimäki, T.; Vuorela, T.; Peltola, P.; Vanhala, J. A review on device-free passive indoor positioning methods. Int. J. Smart Home 2014, 8, 71–94. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Yao, J.; Balaei, A.; Hassan, M.; Alam, N.; Dempster, A. Improving Cooperative Positioning for Vehicular Networks. IEEE Trans. Veh. Technol. 2011, 60, 2810–2823. [Google Scholar] [CrossRef]
- Zhou, Z.; Cui, J.H.; Zhou, S. Localization for Large-Scale Underwater Sensor Networks. In Networking 2007. Ad Hoc and Sensor Networks, Wireless Networks, Next Generation Internet; Lecture Notes in Computer Science; Akyildiz, I., Sivakumar, R., Ekici, E., Oliveira, J., McNair, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; Volume 4479, pp. 108–119. [Google Scholar]
- Han, G.; Xu, H.; Duong, T.; Jiang, J.; Hara, T. Localization algorithms of Wireless Sensor Networks: A survey. Telecommun. Syst. 2013, 52, 2419–2436. [Google Scholar] [CrossRef]
- Ubisense Ltd. The Ubisense Precise Real-time Location System. 2016. Available online: http://www.ubisense.net (accessed on 22 April 2017).
- Ekahau Inc. The Ekahau Real Time Location System. 2016. Available online: https://www.airistaflow.com (accessed on 22 April 2017).
- De Angelis, G.; Pasku, V.; De Angelis, A.; Dionigi, M.; Mongiardo, M.; Moschitta, A.; Carbone, P. An Indoor AC Magnetic Positioning System. IEEE Trans. Instrum. Meas. 2015, 64, 1275–1283. [Google Scholar] [CrossRef]
- De Angelis, G.; De Angelis, A.; Pasku, V.; Moschitta, A.; Carbone, P. A hybrid outdoor/indoor Positioning System for IoT applications. In Proceedings of the 2015 IEEE International Symposium on Systems Engineering (ISSE), Rome, Italy, 29–30 September 2015; pp. 1–6. [Google Scholar]
- Yang, Z.; Wu, C.; Liu, Y. Locating in Fingerprint Space: Wireless Indoor Localization with Little Human Intervention. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking (Mobicom ’12), Istanbul, Turkey, 22–26 August 2012; ACM: New York, NY, USA, 2012; pp. 269–280. [Google Scholar]
- Galván-Tejada, C.E.; García-Vázquez, J.P.; Galván-Tejada, J.I.; Delgado-Contreras, J.R.; Brena, R.F. Infrastructure-Less Indoor Localization Using the Microphone, Magnetometer and Light Sensor of a Smartphone. Sensors 2015, 15, 20355. [Google Scholar] [CrossRef] [PubMed]
- Zhuang, P.; Wang, D.; Shang, Y. SMART: Simultaneous indoor localization and map construction using smartphones. In Proceedings of the The 2010 International Joint Conference on Neural Networks (IJCNN), Barcelona, Spain, 18–23 July 2010; pp. 1–8. [Google Scholar]
- Jiang, Y.; Pan, X.; Li, K.; Lv, Q.; Dick, R.P.; Hannigan, M.; Shang, L. ARIEL: Automatic Wi-fi Based Room Fingerprinting for Indoor Localization. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing (UbiComp ’12), Pittsburgh, PA, USA, 5–8 September 2012; ACM: New York, NY, USA, 2012; pp. 441–450. [Google Scholar]
- Martin, E.; Vinyals, O.; Friedland, G.; Bajcsy, R. Precise Indoor Localization Using Smart Phones. In Proceedings of the 18th ACM International Conference on Multimedia (MM ’10), Firenze, Italy, 25–29 October 2010; ACM: New York, NY, USA, 2010; pp. 787–790. [Google Scholar]
- Wang, Y.; Zhao, B.; Jiang, Z. Rssi-based smooth localization for indoor environment. Sci. World J. 2014, 2014, 639142. [Google Scholar] [CrossRef] [PubMed]
- Park, K.; Shin, H.; Cha, H. Smartphone-based pedestrian tracking in indoor corridor environments. Pers. Ubiquitous Comput. 2013, 17, 359–370. [Google Scholar] [CrossRef]
- Kang, W.; Han, Y. SmartPDR: Smartphone-Based Pedestrian Dead Reckoning for Indoor Localization. IEEE Sens. J. 2015, 15, 2906–2916. [Google Scholar] [CrossRef]
- Schmid, J.; Völker, M.; Gädeke, T.; Weber, P.; Stork, W.; Müller-Glaser, K.D. An approach to infrastructure-independent person localization with an IEEE 802.15.4 WSN. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–9. [Google Scholar]
- Pourabdollah, A.; Meng, X.; Jackson, M. Towards low-cost collaborative mobile positioning. In Proceedings of the Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS), Kirkkonummi, Finland, 14–15 October 2010; pp. 1–5. [Google Scholar]
- Bal, M.; Liu, M.; Shen, W.; Ghenniwa, H. Localization in cooperative Wireless Sensor Networks: A review. In Proceedings of the 13th International Conference on Computer Supported Cooperative Work in Design (CSCWD 2009), Santiago, Chile, 22–24 April 2009; pp. 438–443. [Google Scholar]
- Mao, G.; Fidan, B.; Mao, G.; Fidan, B. Localization Algorithms and Strategies for Wireless Sensor Networks; Information Science Reference–Imprint of IGI Publishing: Hershey, PA, USA, 2009. [Google Scholar]
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Karapistoli, E.; Pavlidou, F.N.; Gragopoulos, I.; Tsetsinas, I. An overview of the IEEE 802.15.4a Standard. IEEE Commun. Mag. 2010, 48, 47–53. [Google Scholar] [CrossRef]
- Sahinoglu, Z.; Gezici, S. Ranging in the IEEE 802.15.4a Standard. In Proceedings of the 2006 IEEE Annual Wireless and Microwave Technology Conference, Clearwater Beach, FL, USA, 4–5 December 2006; pp. 1–5. [Google Scholar]
- Salman, N.; Rasool, I.; Kemp, A.H. Overview of the IEEE 802.15.4 standards family for Low Rate Wireless Personal Area Networks. In Proceedings of the 2010 7th International Symposium on Wireless Communication Systems (ISWCS), York, UK, 19–22 September 2010; pp. 701–705. [Google Scholar]
- Tripathi, A.; Karnik, N. Trends in multiprocessor and distributed operating systems designs. J. Supercomput. 1995, 9, 23–49. [Google Scholar] [CrossRef]
- Baccelli, E.; Hahm, O.; Günes, M.; Wählisch, M.; Schmidt, T.C. RIOT OS: Towards an OS for the Internet of Things. In Proceedings of the 32nd IEEE International Conference on Computer Communications (IEEE INFOCOM), Turin, Italy, 14–19 April 2013. [Google Scholar]
- Farooq, M.O.; Kunz, T. Operating Systems for Wireless Sensor Networks: A Survey. Sensors 2011, 11, 5900–5930. [Google Scholar] [CrossRef] [PubMed]
- FreeRTOS Operating System Organisation. Available online: http://www.freertos.org (accessed on 22 April 2017).
- Levis, P.; Madden, S.; Polastre, J.; Szewczyk, R.; Whitehouse, K.; Woo, A.; Gay, D.; Hill, J.; Welsh, M.; Brewer, E.; et al. TinyOS: An operating system for sensor networks. In Ambient Intelligence; Springer: Berlin, Germany, 2004. [Google Scholar]
- Dunkels, A.; Gronvall, B.; Voigt, T. Contiki—A Lightweight and Flexible Operating System for Tiny Networked Sensors. In Proceedings of the First IEEE Workshop on Embedded Networked Sensors (Emnets-I), Tampa, FL, USA, November 2004. [Google Scholar]
- Will, H.; Schleiser, K.; Schiller, J. A real-time kernel for wireless sensor networks employed in rescue scenarios. In Proceedings of the IEEE 34th Conference on Local Computer Networks ( LCN 2009), Zürich, Switzerland, 20–23 October 2009; pp. 834–841. [Google Scholar]
- Simonović, M.; Saranovac, L. Power management implementation in FreeRTOS on LM3S3748. Serbian J. Electr. Eng. 2013, 10, 199–208. [Google Scholar] [CrossRef]
- Friesen, J. Java XML and JSON, 1st ed.; Apress: New York, NY, USA, 2016. [Google Scholar]
- Blankenbach, J.; Willert, V. Robuster räumlicher Bogenschnitt–Ein Ansatz zur robusten Positionsberechnung in Indoor-Szenarien. Allgemeine Vermessungs-Nachrichten (AVN) 2009, 9, 320–327. [Google Scholar]
- Leys, C.; Ley, C.; Klein, O.; Bernard, P.; Licata, L. Detecting outliers: Do not use standard deviation around the mean, use absolute deviation around the median. J. Exp. Soc.Psychol. 2013, 49, 764–766. [Google Scholar] [CrossRef]
- Rousseeuw, P.J.; Croux, C. Alternatives to the median absolute deviation. J. Am. Stat. Assoc. 1993, 88, 1273–1283. [Google Scholar] [CrossRef]
- Al-Ammar, M.A.; Alhadhrami, S.; Al-Salman, A.; Alarifi, A.; Al-Khalifa, H.S.; Alnafessah, A.; Alsaleh, M. Comparative Survey of Indoor Positioning Technologies, Techniques, and Algorithms. In Proceedings of the 2014 International Conference on Cyberworlds (CW), Santander, Spain, 6–8 October 2014; pp. 245–252. [Google Scholar]
- Cong, L.; Zhuang, W. Hybrid TDOA/AOA mobile user location for wideband CDMA cellular systems. IEEE Trans. Wirel. Commun. 2002, 1, 439–447. [Google Scholar] [CrossRef]
- Huang, J.Y.; Wan, Q. Comments on “The Cramer-Rao Bounds of Hybrid TOA/RSS and TDOA/RSS Location Estimation Schemes”. IEEE Commun. Lett. 2007, 11, 848–849. [Google Scholar] [CrossRef]
- Efrat, A.; Forrester, D.; Iyer, A.; Kobourov, S.G.; Erten, C.; Kilic, O. Force-directed Approaches to Sensor Localization. ACM Trans. Sen. Netw. 2010, 7, 27. [Google Scholar] [CrossRef]
- Yedavalli, K.; Krishnamachari, B. Sequence-Based Localization in Wireless Sensor Networks. IEEE Trans. Mob. Comput. 2008, 7, 81–94. [Google Scholar] [CrossRef]
- Baggio, A.; Langendoen, K. Monte Carlo localization for mobile wireless sensor networks. Ad Hoc Netw. 2008, 6, 718–733. [Google Scholar] [CrossRef]
- Peng, R.; Sichitiu, M.L. probabilistic, constraint-based localization for wireless sensor networks. In Proceedings of the Second Annual IEEE Sensor and Ad Hoc Communications and Networks, Santa Clara, CA, USA, 26–29 September 2005; pp. 541–550. [Google Scholar]
- STMicroelectronics. Discovery Kit with STM32F407VG MCU, Rev. 5; STMicroelectronics: Geneva, Switzerland, 2016.
- Time Domain®. Data Sheet/User Guide PulsON® 440, Rev. 1; Time Domain: Huntsville, AL, USA, 2016.
- STMicroelectronics. STM32F405xx STM32F407xx data sheet, Rev. 7; STMicroelectronics: Geneva, Switzerland, 2016.
- Hahm, O.; Baccelli, E.; Petersen, H.; Wählisch, M.; Schmidt, T.C. Demonstration Abstract: Simply RIOT: Teaching and Experimental Research in the Internet of Things. In Proceedings of the 13th International Symposium on Information Processing in Sensor Networks (IPSN ’14), Berlin, Germany, 15–17 April 2014; IEEE Press: Piscataway, NJ, USA, 2014; pp. 329–330. [Google Scholar]
- Vasseur, J.P.; Dunkels, A. Interconnecting Smart Objects with IP: The Next Internet; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 2010. [Google Scholar]
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Numerical Recipes in C: The Art of Scientific Computing, 2nd ed.; Cambridge University Press: New York, NY, USA, 1992. [Google Scholar]
- Gupta, D.P. Design and Analysis of Algorithms; Phi Learning: Delhi, India, 2012. [Google Scholar]
- Pradhan, S.; Hwang, S.S. Mathematical analysis of line intersection algorithm for TOA trilateration method. In Proceedings of the 2014 Joint 7th International Conference on and Advanced Intelligent Systems (ISIS), 15th International Symposium on Soft Computing and Intelligent Systems (SCIS), Kita-Kyushu, Japan, 3–6 December 2014; pp. 1219–1223. [Google Scholar]
- Silva, B.; Pang, Z.; Åkerberg, J.; Neander, J.; Hancke, G. Experimental study of UWB-based high precision localization for industrial applications. In Proceedings of the 2014 IEEE International Conference on Ultra-WideBand (ICUWB), Paris, France, 1–3 September 2014; pp. 280–285. [Google Scholar]
- Beutel, J. Geolocation in a picoradio environment. Diploma Thesis, ETH Zurich, Electronics Laboratory, Zurich, Switzerland, 1999. [Google Scholar]
- Norrdine, A. An Algebraic Solution to the Multilateration Problem. In Proceedings of the 15th International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012; Volume 13. [Google Scholar]
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Numerical Recipes 3rd Edition: The Art of Scientific Computing, 3rd ed.; Cambridge University Press: New York, NY, USA, 2007. [Google Scholar]
- Daubechies, I. Ten Lectures on Wavelets; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1992. [Google Scholar]
- Noble, B.; Daniel, J. Applied Linear Algebra; Prentice-Hall: Upper Saddle River, NJ, USA, 1988. [Google Scholar]
- Leach, S. Singular Value Decomposition—A Primer; Department of Computer Science, Brown University: Providence, RI, USA, 1995; Unpublished Manuscript. [Google Scholar]
- Nocedal, J.; Wright, S. Numerical Optimization; Springer Series in Operations Research and Financial Engineering; Springer: New York, NY, USA, 2000. [Google Scholar]
- Norrdine, A. Präzise Positionierung und Orientierung innerhalb von Gebäuden; Technische Univ. Darmstadt, Geodätisches Institut: Darmstadt, Germany, 2009. [Google Scholar]
- Honeywell International Inc. Smart Digital Magnetometer HMR2300, Rev. J.; Honeywell International Inc.: Morris Plains, NJ, USA, 2012.
- NXP Semiconductors. LPC2387 Product Data Sheet, Rev. 5.1; NXP Semiconductors: Eindhoven, The Netherlands, 2013.
- Prigge, E. A Positioning System with No Line-of-Sight Restrictions for Cluttered Environments; Stanford University: Stanford, CA, USA, 2004. [Google Scholar]
- Björck, A. Numerical Methods for Least Squares Problems; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1996. [Google Scholar]
- Blankenbach, J.; Norrdine, A. Magnetic Indoor Local Positioning System. In Indoor Wayfinding and Navigation; CRC Press: Boca Raton, FL, USA, 2015; pp. 53–80. [Google Scholar]
- Dahmen, W.; Reusken, A. Numerik für Ingenieure und Naturwissenschaftler; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Chen, Y.; Kobayashi, H. Signal strength based indoor geolocation. In Proceedings of the IEEE International Conference on Communications (ICC 2002), New York, NY, USA, 28 April–2 May 2002; Volume 1, pp. 436–439. [Google Scholar]
- Krishnakumar, A.S.; Krishnan, P. On the accuracy of signal strength-based estimation techniques. In Proceedings of the IEEE 24th Annual Joint Conference of the IEEE Computer and Communications Societies, Miami, FL, USA, 13–17 March 2005; Volume 1, pp. 642–650. [Google Scholar]
- Neapolitan, R. Foundations of Algorithms; Jones & Bartlett Learning: Burlington, MA, USA, 2015. [Google Scholar]
- Martinez, D. High Performance Embedded Computing Handbook: A Systems Perspective; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Smoktunowicz, A.; Wróbel, I. Numerical aspects of computing the Moore–Penrose inverse of full column rank matrices. BIT Numer. Math. 2012, 52, 503–524. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| OS | Architecture | Real Time | Scheduling | Programming Model | Programming Language |
|---|---|---|---|---|---|
| FreeRTOS | Monolithic | Full Support | Round-robin preemptive and cooperative | Threads | C |
| TinyOS | Monolithic | No Support | FIFO | Primarily event driven, support for TOS threads | nesC |
| Contiki | Modular | Partial Support | Event based | Protothreads and events | C with some constraints |
| RIOT-OS | Microkernel | Full Support | Tickless, preemptive scheduling with priorities | Threads | C and C++ |
| MCU | Family | Vendor | Frequency | RAM | Flash |
|---|---|---|---|---|---|
| STM32F407 | ARM Cortex-M4 | ST Microelectronics | 168 MHz | 192 KB | 1024 KB |
| Accuracy | Max. Operating Range | Max. Ranging Rate | Frequency Range | Transmission Power |
|---|---|---|---|---|
| cm | 300 m–1100 m | 125 Hz | GHz– GHz | 50 W |
| MCU | Family | Vendor | Frequency | RAM | Flash |
|---|---|---|---|---|---|
| LPC2387 | ARM7 | NXP | 72 MHz | 96 KB | 512 KB |
| Range | Sample Rate | Resolution | Accuracy |
|---|---|---|---|
| Gauss (G) | up to 154 Hz | up to G | FS (over G) |
| Algorithm | Complexity (Flops) | |
|---|---|---|
| Matrix multiplication: | [83] | |
| QR-Householder | [84] | |
| Moore–Penrose pseudoinverse | [85] | |
| Algorithm | Computing Time [μs] |
|---|---|
| for the multilateration method (at the start) | 2115 |
| Multilateration method | 32 |
| Gauss–Newton per iteration | 1561 |
| Algorithm | Computing Time (μs) |
|---|---|
| for the multilateration method (at the start) | 4563 |
| Multilateration method | 92 |
| Gauss–Newton method per iteration | 4645 |
| Levenberg–Marquardt method per iteration | 3467 |
| Algorithm | UWB-Based ILS Energy (μWs) | MILPS Energy (μWs) |
|---|---|---|
| by the multilateration method (at the start) | ||
| Multilateration method | 12 | |
| Gauss–Newton per iteration | ||
| Levenberg–Marquardt method per iteration | − |
| Localization System | Energy (mWs) |
|---|---|
| UWB-based ILS | |
| MILPS (Gauss–Newton) | |
| MILPS (Levenberg–Marquardt) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kasmi, Z.; Norrdine, A.; Blankenbach, J. Platform Architecture for Decentralized Positioning Systems. Sensors 2017, 17, 957. https://doi.org/10.3390/s17050957
Kasmi Z, Norrdine A, Blankenbach J. Platform Architecture for Decentralized Positioning Systems. Sensors. 2017; 17(5):957. https://doi.org/10.3390/s17050957
Chicago/Turabian StyleKasmi, Zakaria, Abdelmoumen Norrdine, and Jörg Blankenbach. 2017. "Platform Architecture for Decentralized Positioning Systems" Sensors 17, no. 5: 957. https://doi.org/10.3390/s17050957
APA StyleKasmi, Z., Norrdine, A., & Blankenbach, J. (2017). Platform Architecture for Decentralized Positioning Systems. Sensors, 17(5), 957. https://doi.org/10.3390/s17050957