
A Consistency Evaluation and Calibration Method for Piezoelectric Transmitters


Abstract
:1. Introduction
2. The Consistency Evaluation Method Based on an Impedance Analyzer
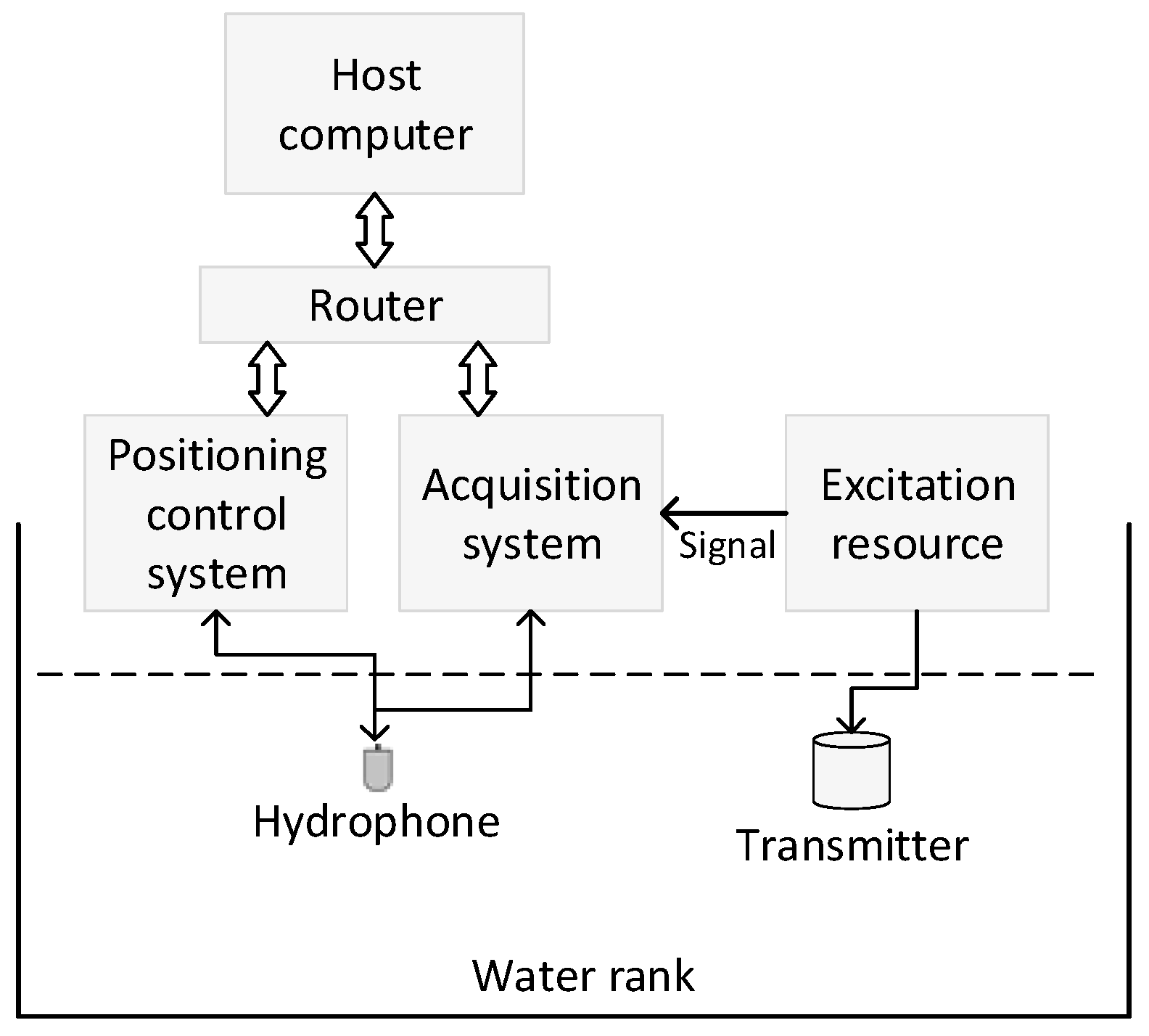
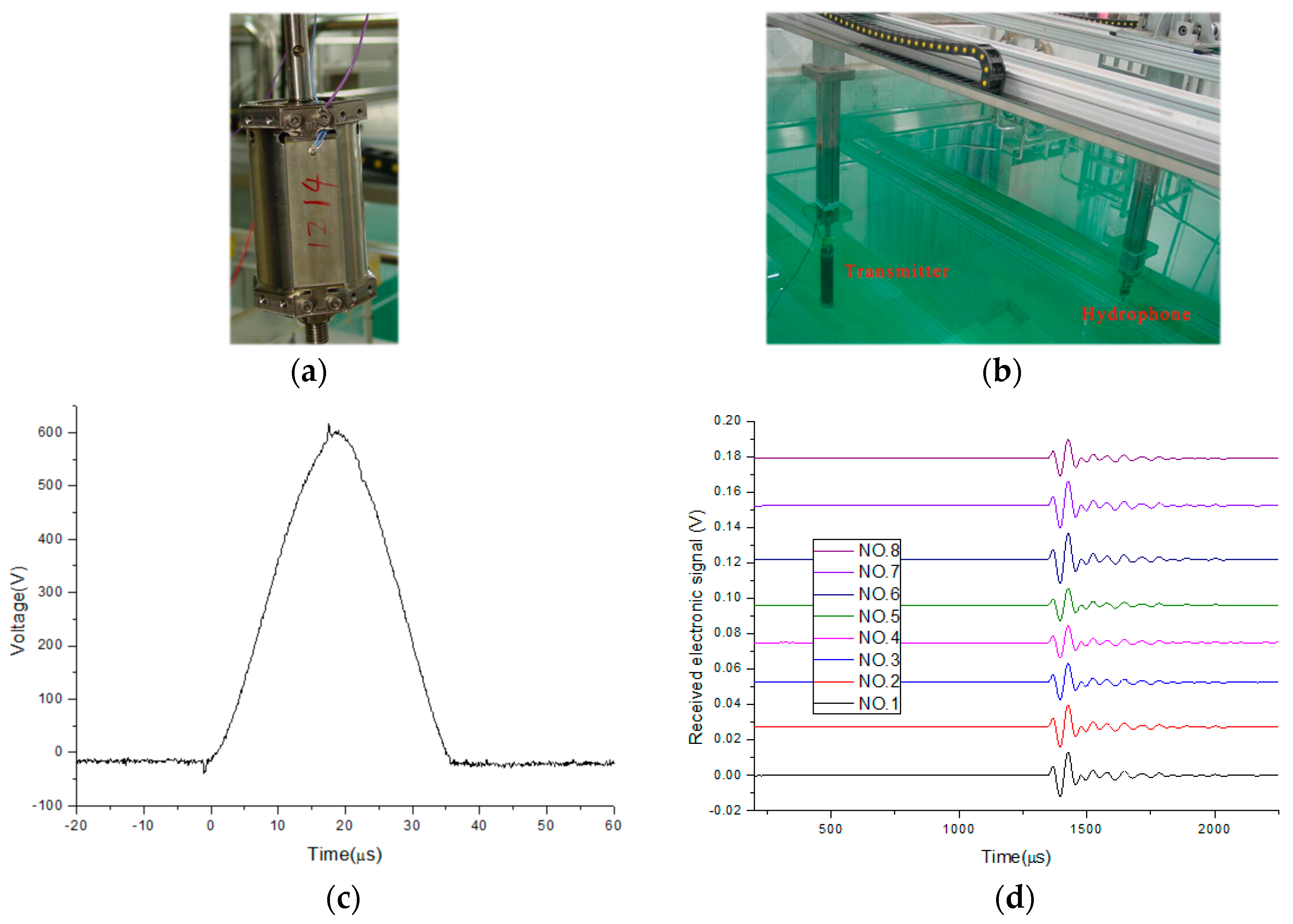
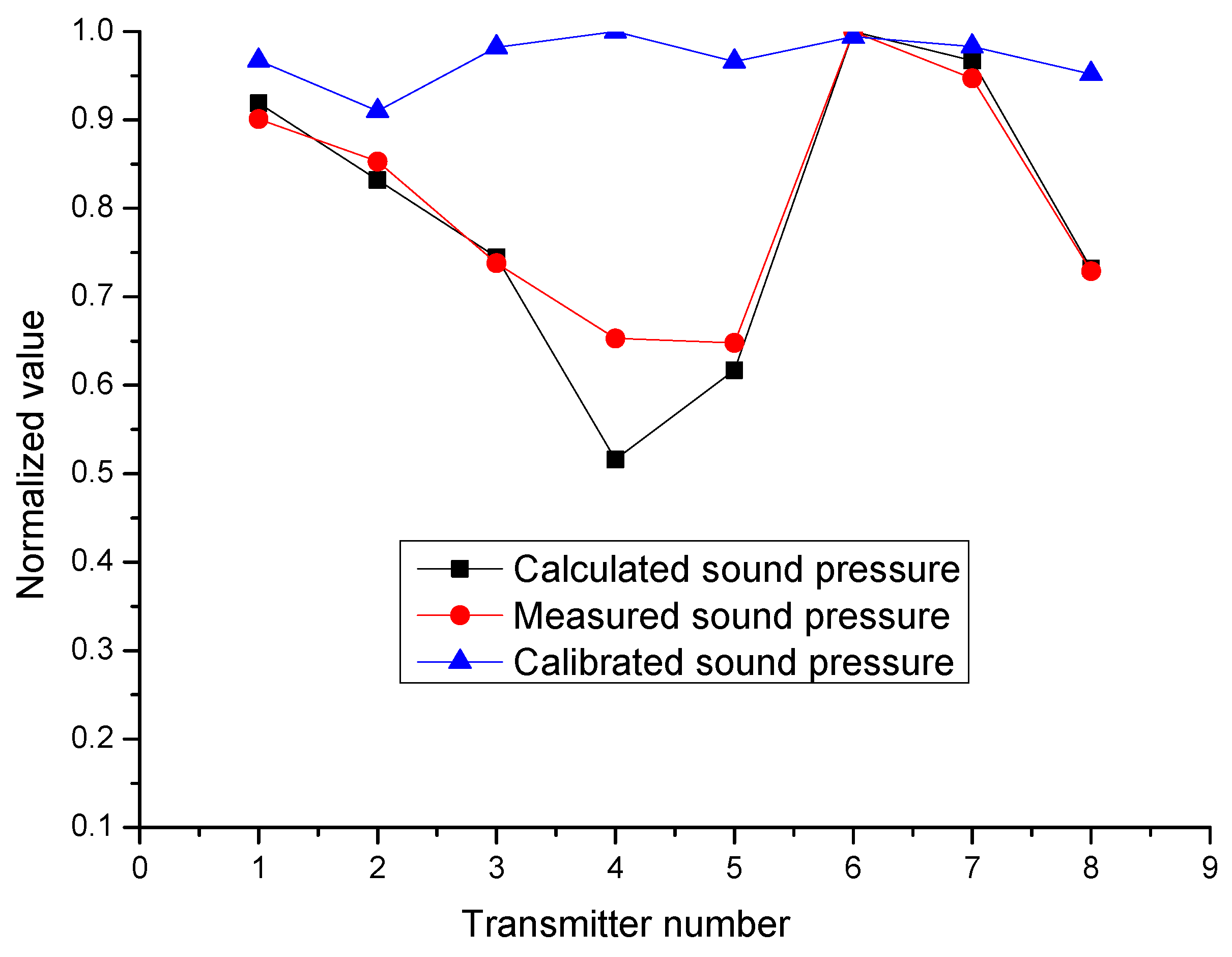
3. Experiments and Results
4. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Na, W.S.; Baek, J. Impedance-based non-destructive testing method combined with unmanned aerial vehicle for structural health monitoring of civil infrastructures. Appl. Sci. 2017, 7, 15. [Google Scholar] [CrossRef]
- Lipper, A.; Borden, J. Urethane transducer encapsulation versus oil filled boot encapsulation of piezoelectric transducers. In Proceedings of the 2012 OCEANS, Hampton Roads, VA, USA, 14–19 October 2012. [Google Scholar]
- Lawry, T.J.; Wilt, K.R.; Roa-Prada, S.; Ashdown, J.D.; Saulnier, G.J.; Scarton, H.A.; Das, P.K.; Pinezich, J.D. Electrical optimization of power delivery through thick steel barriers using piezoelectric transducers. In Proceedings of the Conference on Energy Harvesting and Storage-Materials, Devices, and Applications, Orlando, FL, USA, 5–6 April 2010. [Google Scholar]
- Lee, H.S.; Kundu, J.; Kim, R.N.; Shin, Y.K. Transducer of erbb2.1 (tob1) as a tumor suppressor: A mechanistic perspective. Int. J. Mol. Sci. 2015, 16, 29815–29828. [Google Scholar] [CrossRef] [PubMed]
- Li, D.H.; Wu, M.; Oyang, P.X.; Xu, X.F. Cymbal piezoelectric composite underwater acoustic transducer. Ultrasonics 2006, 44, E685–E687. [Google Scholar] [CrossRef] [PubMed]
- Chi, F.L.; Wu, Y.Z.; Yan, Q.B.; Shen, Y.H.; Jiang, Y.; Fan, B.H. Sensitivity and fidelity of a novel piezoelectric middle ear transducer. ORL J. Otorhinolaryngol. Relat. Spec. 2009, 71, 216–220. [Google Scholar] [CrossRef] [PubMed]
- Qiu, Y.; Gigliotti, J.V.; Wallace, M.; Griggio, F.; Demore, C.E.M.; Cochran, S.; Trolier-McKinstry, S. Piezoelectric micromachined ultrasound transducer (PMUT) arrays for integrated sensing, actuation and imaging. Sensors 2015, 15, 8020–8041. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Xue, Q.-T.; Chen, Y.-Q.; Shu, Y.; Tian, H.; Yang, Y.; Xie, D.; Luo, J.-W.; Ren, T.-L. A flexible ultrasound transducer array with micro-machined bulk PZT. Sensors 2015, 15, 2538–2547. [Google Scholar] [CrossRef] [PubMed]
- Che, X.H.; Qiao, W.X.; Wang, R.J.; Zhao, Y.H. Numerical simulation of an acoustic field generated by a phased arc array in a fluid-filled cased borehole. Pet. Sci. 2014, 11, 385–390. [Google Scholar] [CrossRef]
- Che, X.H.; Qiao, W.X.; Ju, X.D.; Lu, J.Q.; Wu, J.P. An experimental study on azimuthal reception characteristics of acoustic well-logging transducers based on phased-arc arrays. Geophysics 2014, 79, D197–D204. [Google Scholar] [CrossRef]
- Lu, J.Q.; Ju, X.D.; Qiao, W.X.; Men, B.Y.; Wang, R.J.; Wu, J.P. Azimuthally acoustic logging tool to evaluate cementing quality. J. Geophys. Eng. 2014, 11, 045006. [Google Scholar] [CrossRef]
- Casula, O.; Toullelan, G.; Dumas, P. Inspection of complex components with flexible phased array transducer. J. Acoust. Soc. Am. 2008, 123, 3118. [Google Scholar] [CrossRef]
- Primakoff, H.; Foldy, L.L. A general theory of passive linear electroacoustic transducers and the electroacoustic reciprocity theorem. II. J. Acoust. Soc. Am. 1947, 50. [Google Scholar] [CrossRef]
- Foldy, L.L.; Primakoff, H. A general theory of passive linear electroacoustic transducers and the electroacoustic reciprocity theorem. I. J. Acoust. Soc. Am. 1945, 109. [Google Scholar] [CrossRef]
- Hoja, J.; Lentka, G. A family of new generation miniaturized impedance analyzers for technical object diagnostics. Metrol. Meas. Syst. 2013, 20, 43–52. [Google Scholar] [CrossRef]
- Lin, S.; Xu, J. Effect of the matching circuit on the electromechanical characteristics of sandwiched piezoelectric transducers. Sensors 2017, 17, 329. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; Wang, L.; Qin, L. Simulation of 1-3 piezoelectric composite cylindrical transducer. Ferroelectrics 2014, 471, 17–22. [Google Scholar] [CrossRef]
- Wu, J.; Qiao, W.; Che, X.; Ju, X.; Lu, J.; Wu, W. Experimental study on the radiation characteristics of downhole acoustic phased combined arc array transmitter. Geophysics 2013, 78, D1–D9. [Google Scholar] [CrossRef]
- Zhang, K.; Ju, X.D.; Lu, J.Q.; Men, B.Y. Design of acoustic logging signal source of imitation based on field programmable gate array. J. Geophys. Eng. 2014, 11, 045008. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NO. | KP | Qm | Gmax (ms) | FS (Hz) | Normalized Calculation Results |
|---|---|---|---|---|---|
| 1 | 0.432 | 36.941 | 21.242 | 15368 | 0.919 |
| 2 | 0.428 | 40.474 | 23.018 | 15496 | 0.832 |
| 3 | 0.431 | 32.116 | 17.715 | 15420 | 0.745 |
| 4 | 0.401 | 17.817 | 10.727 | 15268 | 0.516 |
| 5 | 0.400 | 29.354 | 15.584 | 15500 | 0.617 |
| 6 | 0.380 | 39.903 | 22.739 | 15686 | 1.000 |
| 7 | 0.371 | 27.454 | 17.331 | 15840 | 0.967 |
| 8 | 0.399 | 34.420 | 20.204 | 15560 | 0.732 |
| NO. | Calculation Results | Measured Sound Pressure (Pa) | Normalized Pressure | Adjustment Voltage (V) | Measured Sound Pressure * (Pa) | Normalized Pressure * |
|---|---|---|---|---|---|---|
| 1 | 0.919 | 1386.4 | 0.901 | 665.9 | 1539.9 | 0.967 |
| 2 | 0.832 | 1312.6 | 0.853 | 703.4 | 1449.1 | 0.910 |
| 3 | 0.745 | 1135.6 | 0.738 | 813.0 | 1563.8 | 0.982 |
| 4 | 0.516 | 1004.8 | 0.653 | 918.8 | 1592.5 | 1.000 |
| 5 | 0.617 | 997.1 | 0.648 | 925.9 | 1538.3 | 0.966 |
| 6 | 1.000 | 1538.8 | 1.000 | 600 | 1582.9 | 0.994 |
| 7 | 0.967 | 1457.2 | 0.947 | 633.6 | 1565.4 | 0.983 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, K.; Tan, B.; Liu, X. A Consistency Evaluation and Calibration Method for Piezoelectric Transmitters. Sensors 2017, 17, 985. https://doi.org/10.3390/s17050985
Zhang K, Tan B, Liu X. A Consistency Evaluation and Calibration Method for Piezoelectric Transmitters. Sensors. 2017; 17(5):985. https://doi.org/10.3390/s17050985
Chicago/Turabian StyleZhang, Kai, Baohai Tan, and Xianping Liu. 2017. "A Consistency Evaluation and Calibration Method for Piezoelectric Transmitters" Sensors 17, no. 5: 985. https://doi.org/10.3390/s17050985
APA StyleZhang, K., Tan, B., & Liu, X. (2017). A Consistency Evaluation and Calibration Method for Piezoelectric Transmitters. Sensors, 17(5), 985. https://doi.org/10.3390/s17050985