
Atmospheric Sampling on Ascension Island Using Multirotor UAVs

Abstract
:1. Introduction
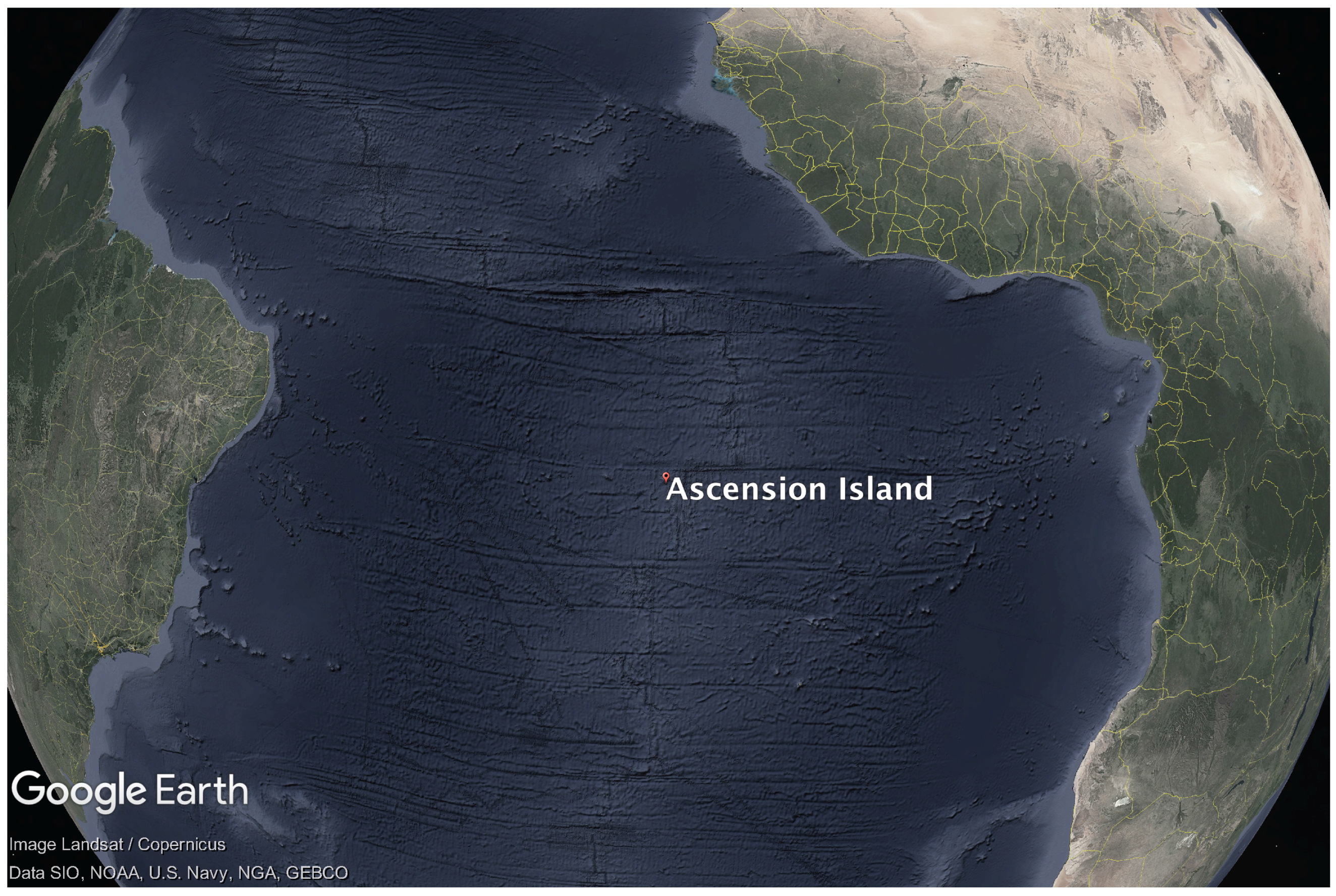
2. Campaign Field Site
3. Rationale for the SUAS Platform
- To be able to operate on Ascension Island, with the required associated logistics and support.
- To be able to operate in a tropical equatorial environment, in close proximity to the sea, at high altitude (for SUAS) and with wind speeds averaging 8 ms at ground level.
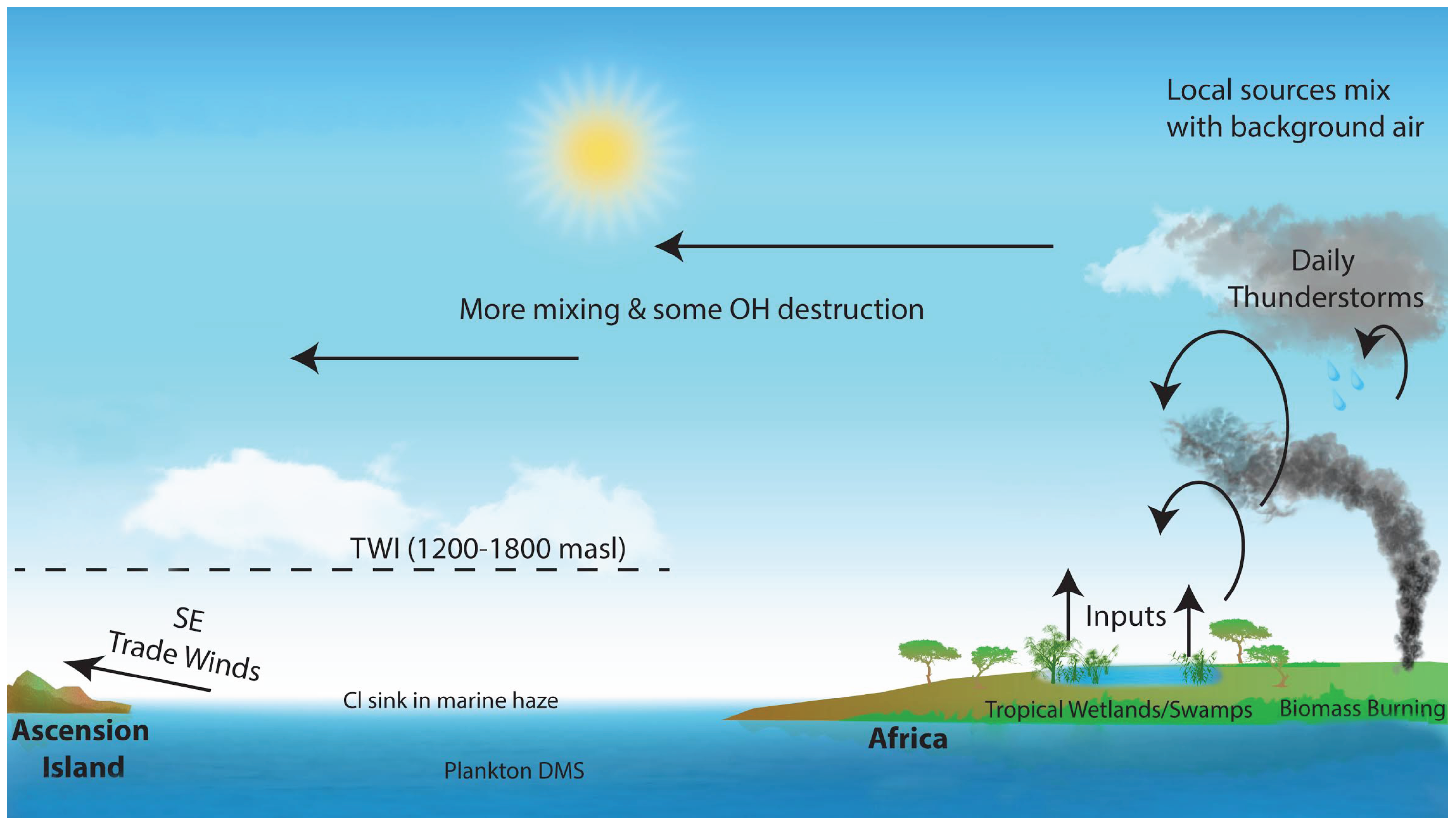
- To be able to sample repeatedly at a minimum altitude 100 m or more above the inversion layer, identified on Ascension as varying seasonally between 1200 m and 2000 m ASL through the year.
- To be able to identify the lower and upper boundaries of the inversion during flight in order to be able to target samples within, above and below.
- To be able to remotely trigger the air sample collection.
- To be able to fly multiple times per day, nominally six samples per day at specified altitudes in a safe and reliable manner.
- Potentially low cost.
- Flights could be carried out in a matter of minutes, thereby accounting for rapid changes in conditions and allowing for multiple samples at specific times throughout the day.
- Flight profiles can be near vertical, allowing for easy airspace integration and de-confliction.
- Transport and ground support for the vehicles are relatively easy to deploy.
- Maintenance is relatively easy due to a modular design.
- The design allows for flexibility in the payload integration.
4. System Description
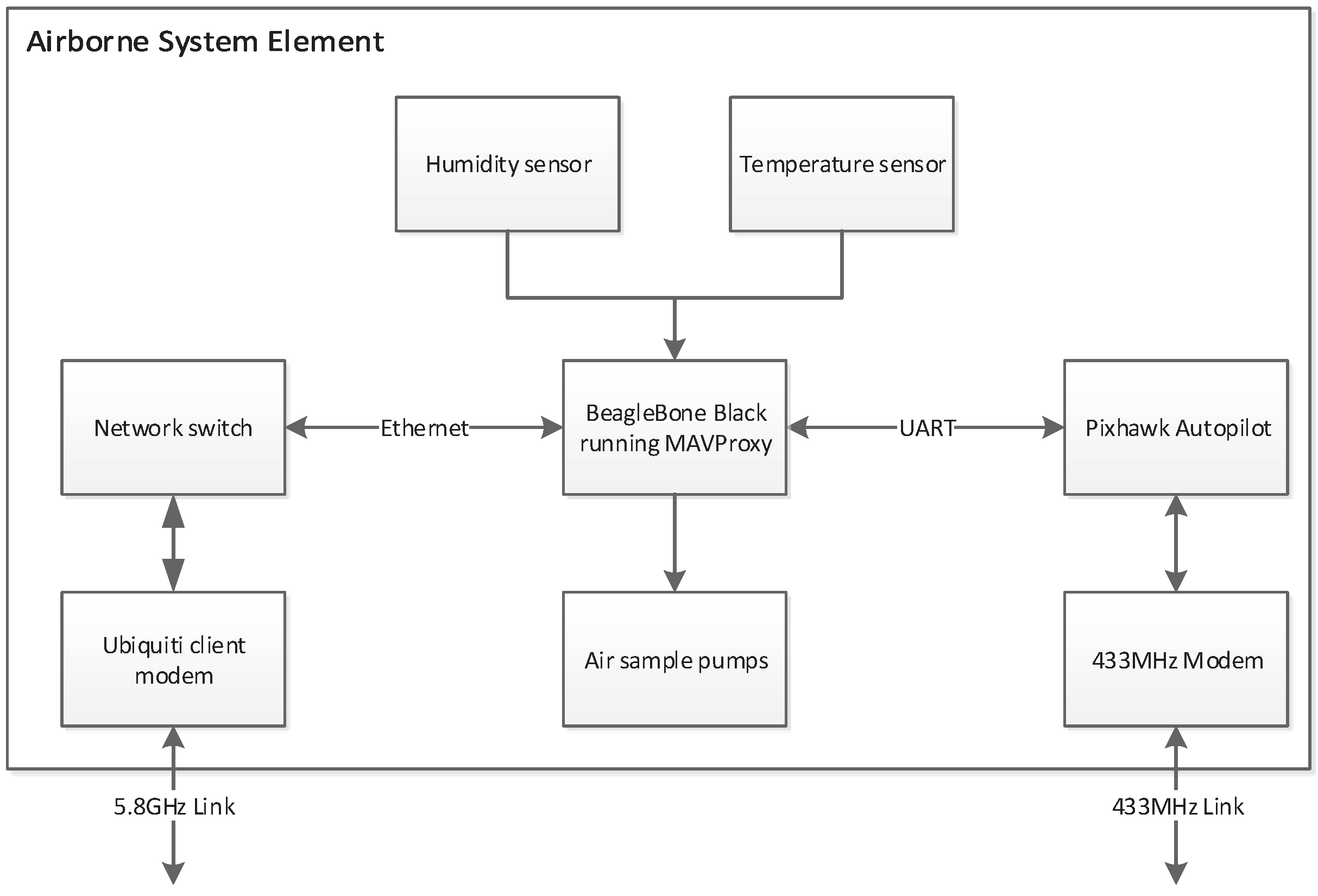
4.1. Airborne Vehicle
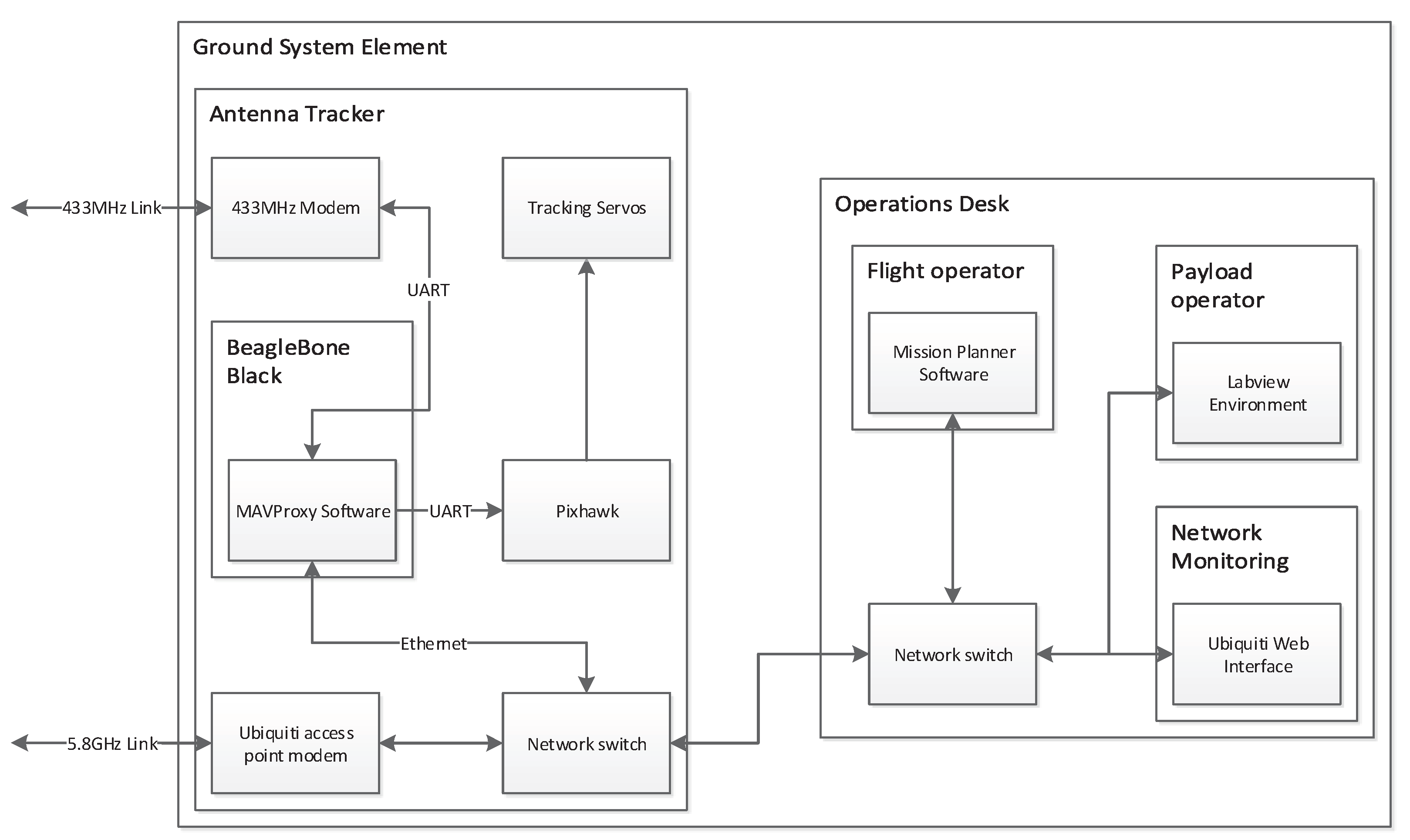
4.2. Ground Station
5. Operational Considerations
5.1. Field Site Operations on Ascension Island
5.2. Typical Flight Operations
- Preparation of the flight vehicle including physical and system checks and preparation of the air sample bags including air evacuation.
- Preparation of the flight plan, including alternative routes for descent depending on the upper wind conditions. See Figure 8 for a visual depiction of a typical mission.
- Pre-flight checks, arming the vehicle and manual take-off to 20 m AGL undergoing manual flight checks by the safety pilot.
- Switching the vehicle into automatic mode and carrying out the ascent to the pre-determined altitude at 5 ms ascent speed.
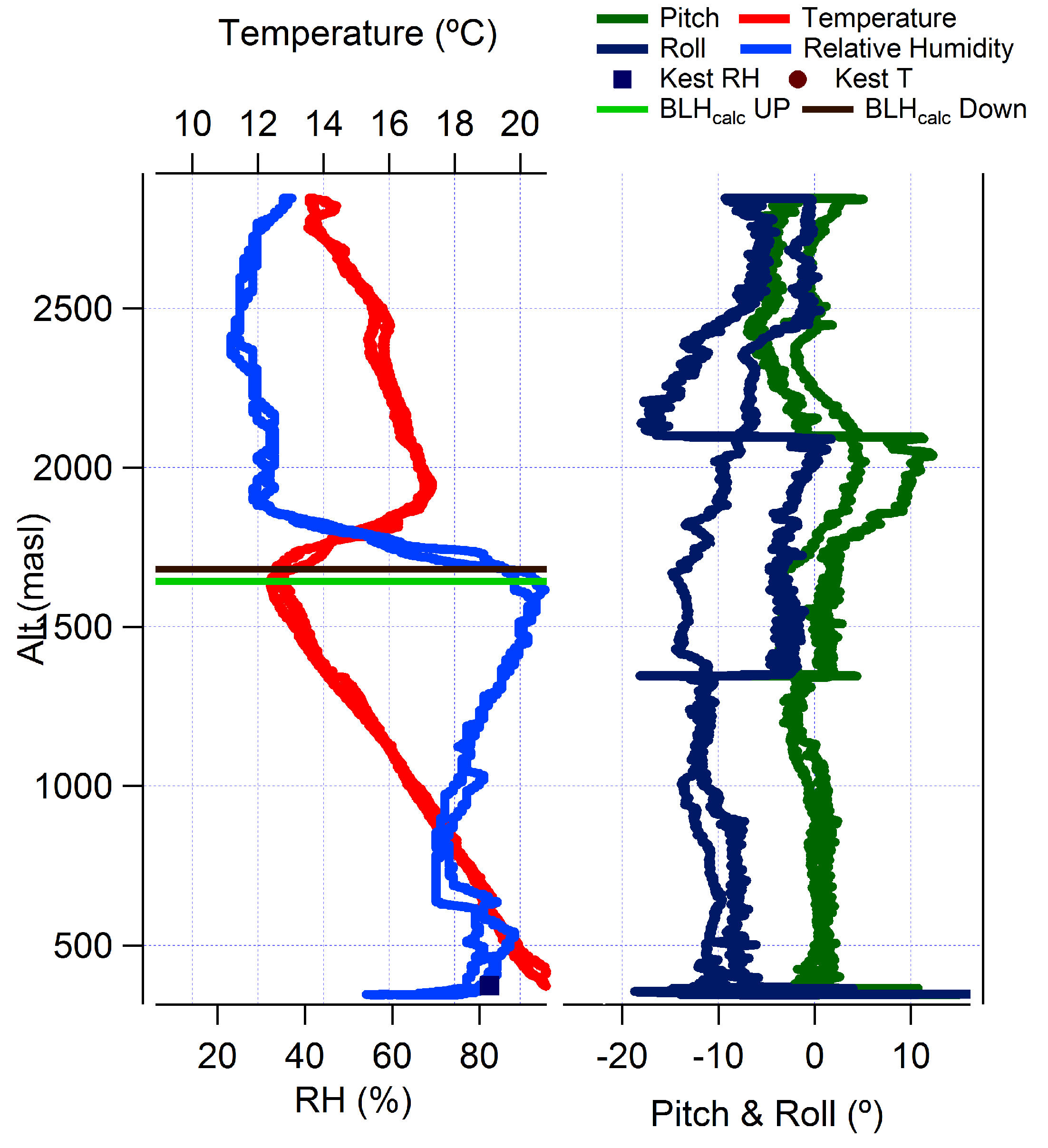
- Monitor temperature and relative humidity profiles throughout the climb, confirming the location and thickness of the trade wind inversion. The sensor operator at this time would confirm the predetermined sample heights or adjust depending on the altitude at which the trade wind inversion was encountered.
- On agreement with the ground station and sensor operators, the air samples were triggered at the required altitudes. Pump times varied between 40 s and 60 s depending on the target altitudes for the samples.
- The descent was carried out automatically at −5 ms, reverting to manual at 20 m Above Ground Level (AGL).
- Post flight checks were then carried out, battery voltages recorded, flight data stored and the air sample(s) retrieved.
6. Lessons Learned
- Ground station power was lost during one of the initial flights. The power sources taken to support operations malfunctioned, and a return to launch was triggered by the safety pilot. All subsequent operations in the first campaign were powered from two inverters. For the second field campaign, a generator was sourced to provide power on site.
- One of the ESCs (Electronic Speed Controller) failed as the aircraft was prepared for flight. This was identified by the safety pilot and replaced before further operations continued.
- Difficulties were identified at one point with the telemetry downlink; this was traced to a file size limit being reached on the onboard computer. Once identified, this was corrected, and flights continued.
- High wind speeds above the inversion were identified in the second half of the first field camp again. These are outlined in detail together with mitigation strategies in the subsequent section.
- One of the GPS batteries became loose during flight and was identified in the pre-flight checks prior to the following operation. This was triggered as a magnetometer error, and the unit was replaced and checked before the subsequent flight.
- One of the commercially-purchased battery connections failed during flight, which was identified from the flight director observing an unusually high voltage drop on the initial climb out; therefore, a return to home was triggered by the safety pilot. All additional battery connections were checked and modified prior to resumption of flight operations.
7. Flight Envelope
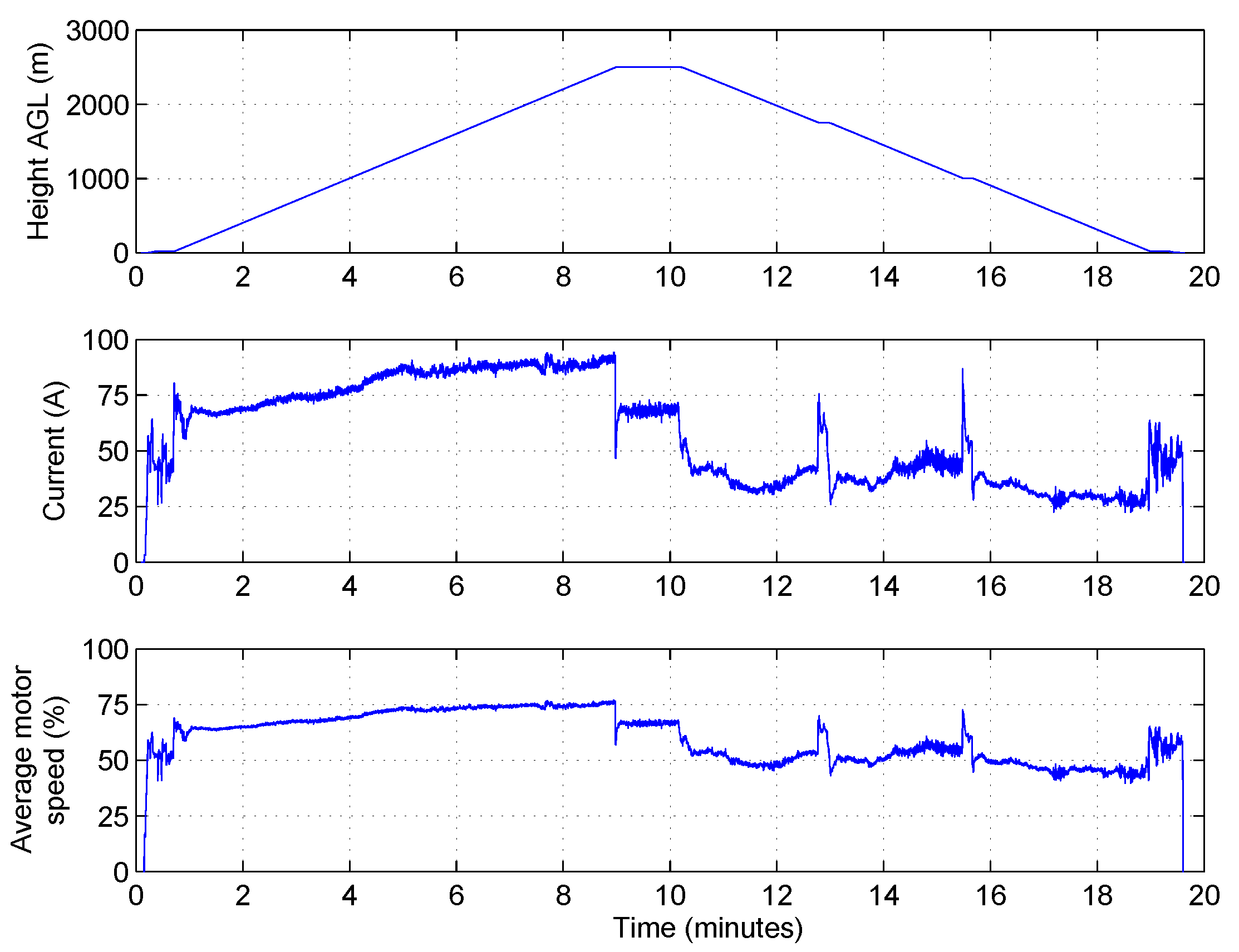
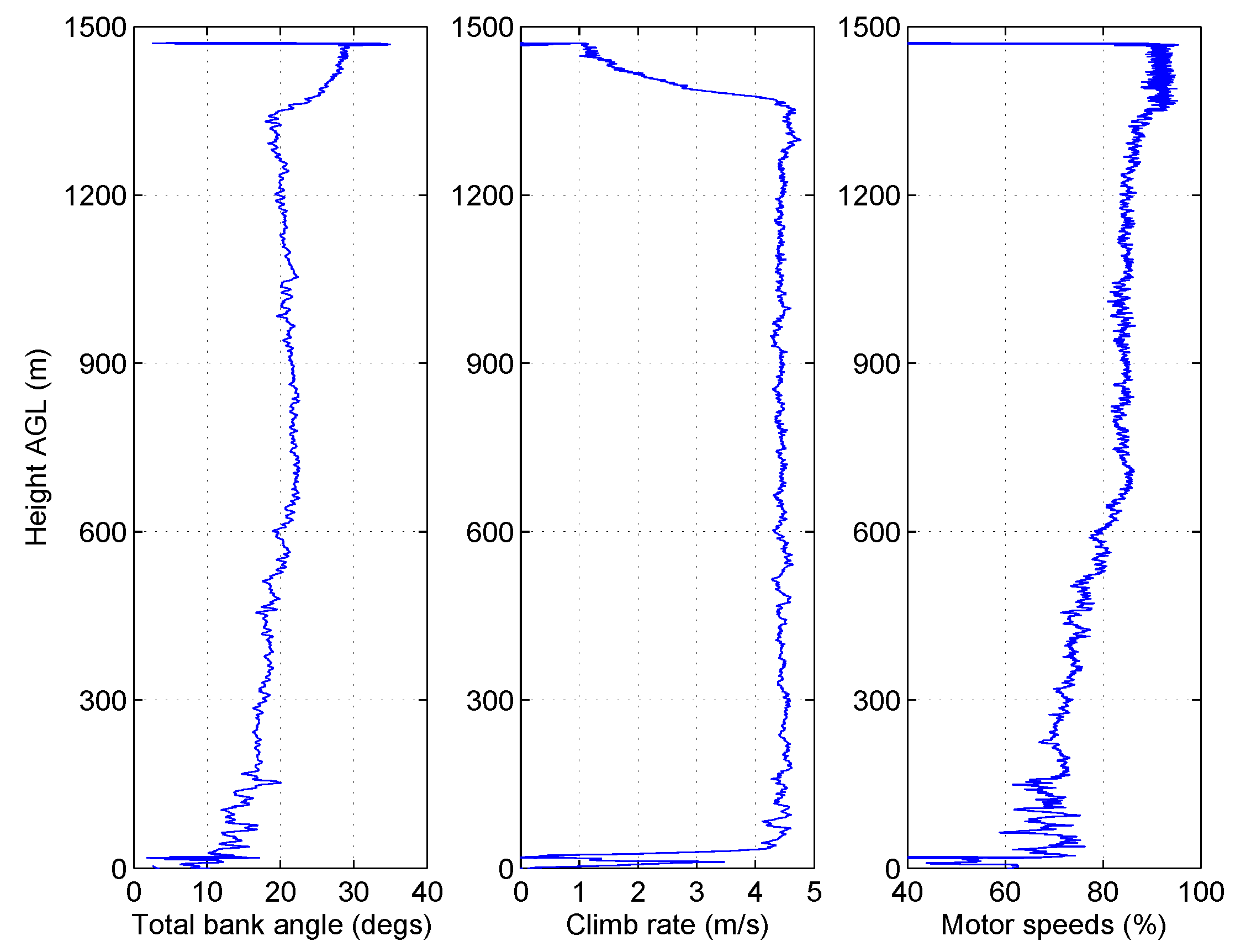
7.1. Achieving Maximum Altitude and on-Board Power Management
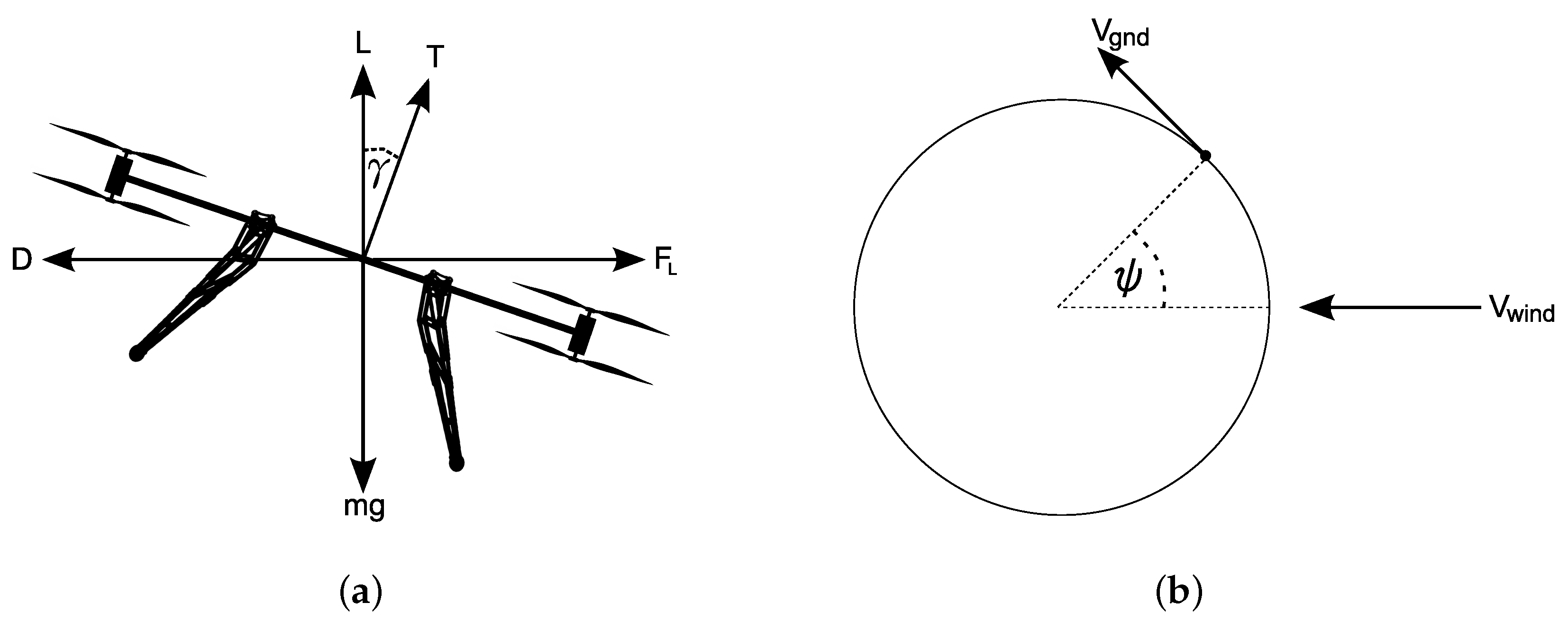
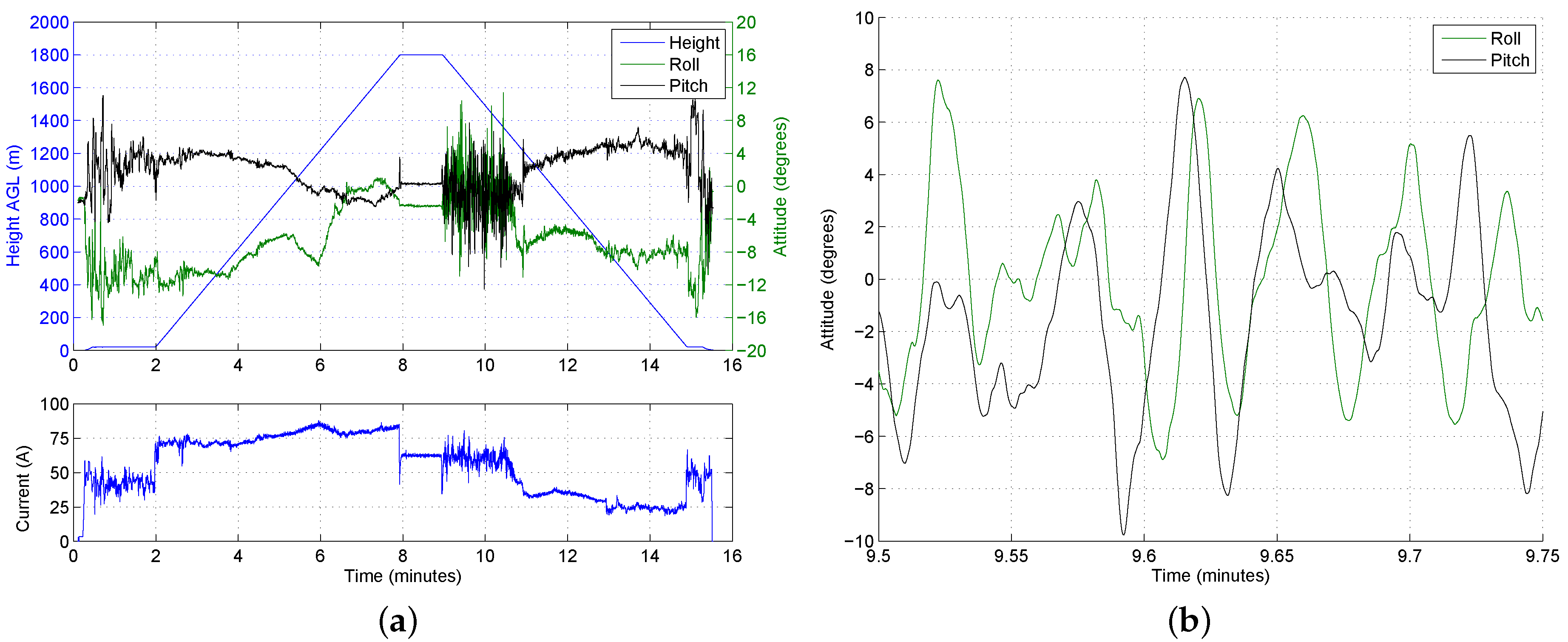
7.2. Performance in Wind
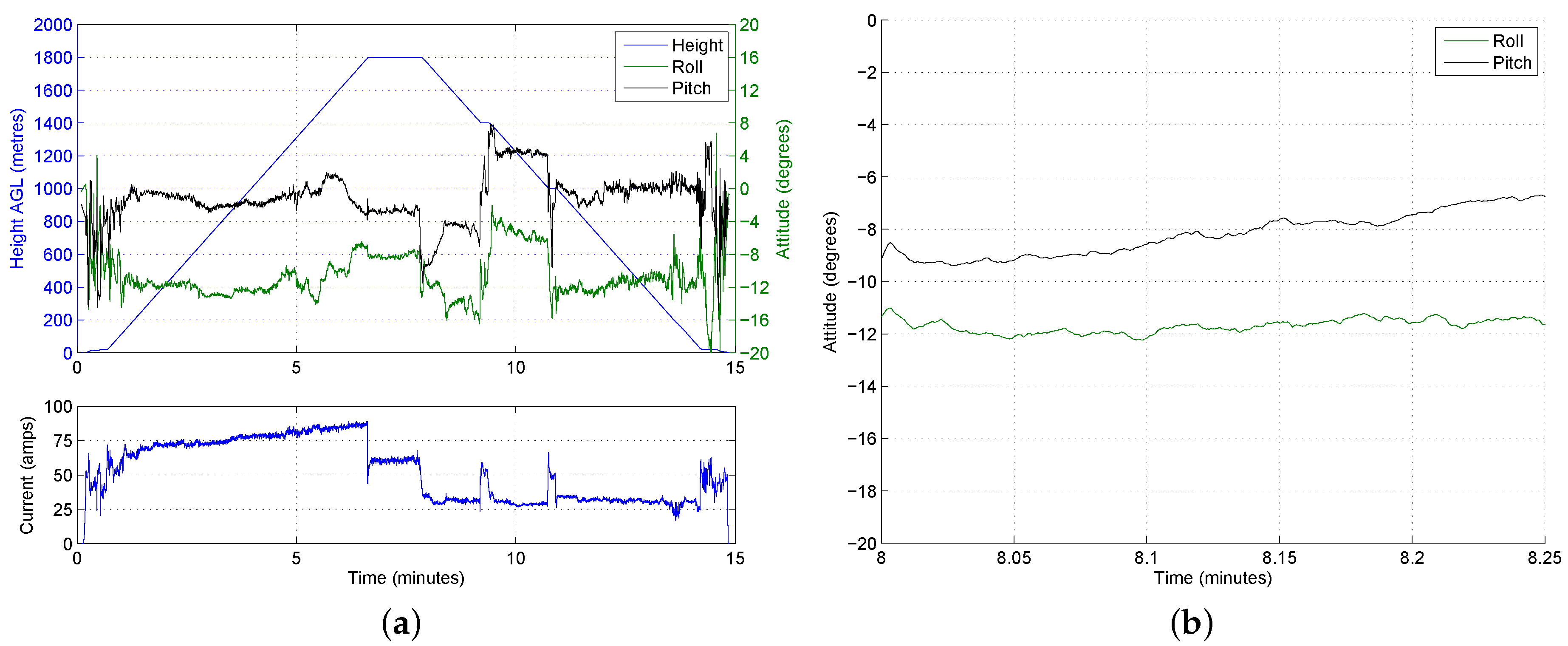
7.3. Flight through Still Air
7.4. Trajectory Design for Descent in Still Air Conditions
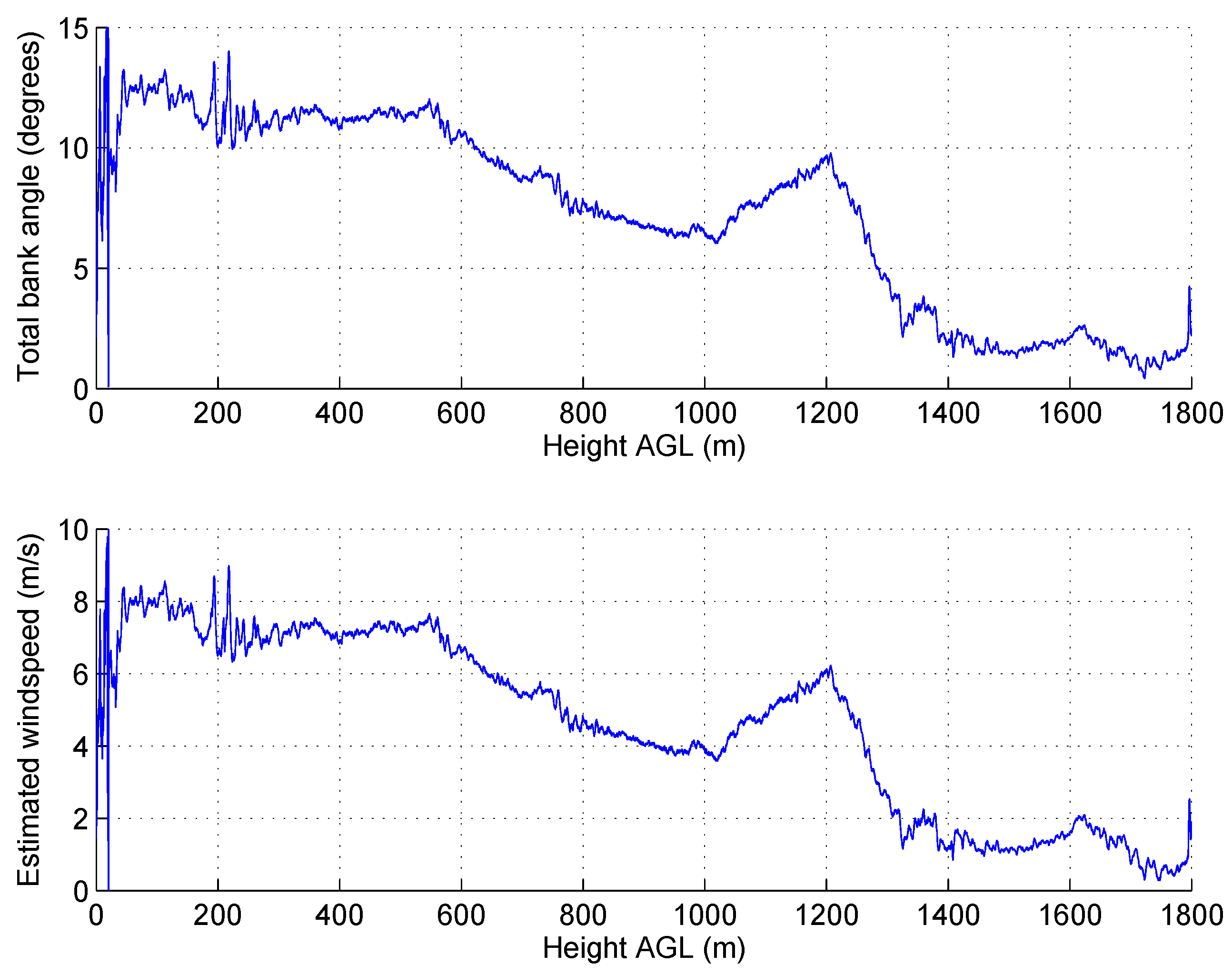
7.5. Upper Wind Speed Limits
8. Payload
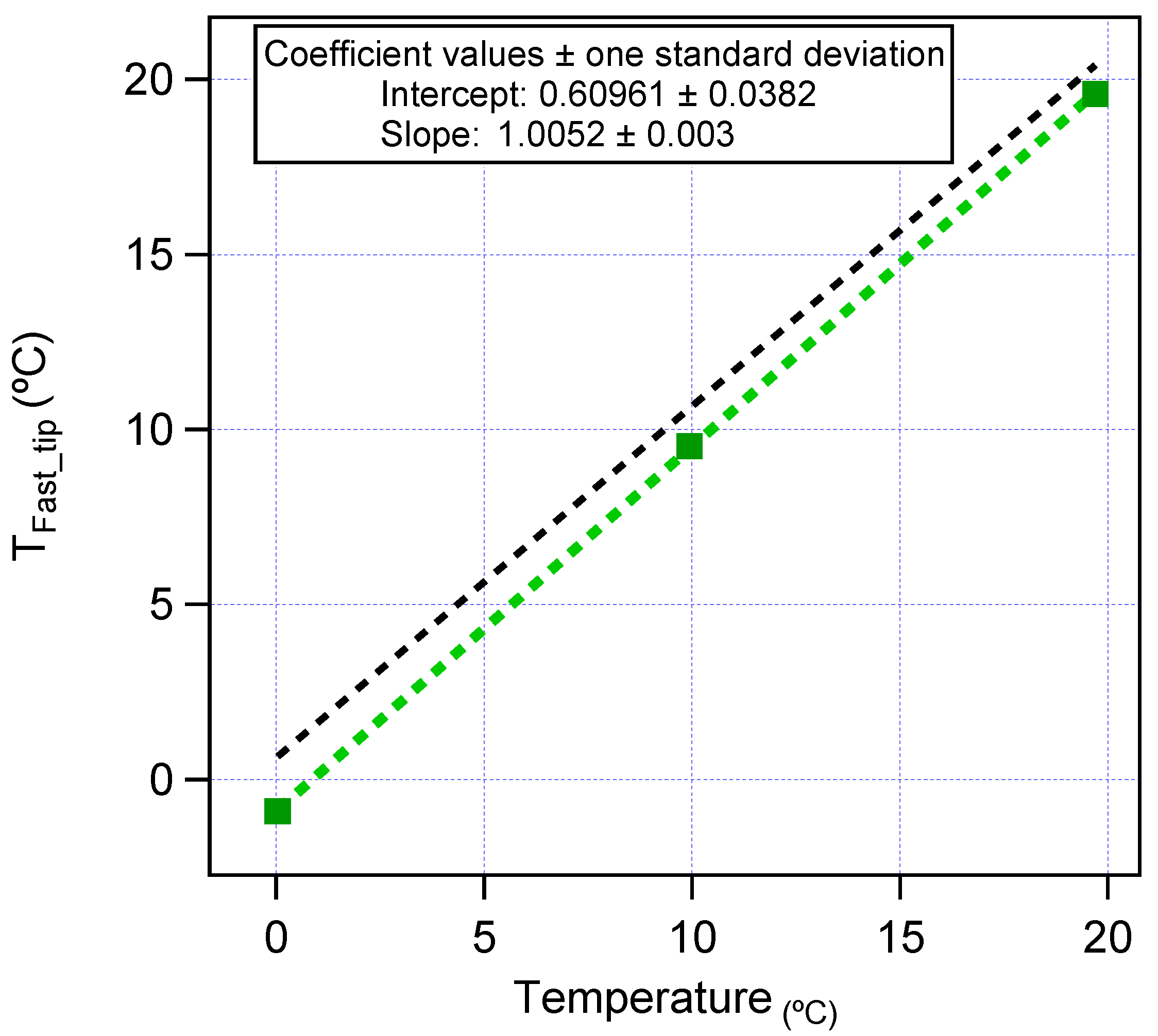
8.1. Meteorological Sensor Assessment
8.2. Methane Sample Results
9. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| AGL | Above Ground Level |
| ASL | Above Sea Level |
| BBB | Beagle Bone Black |
| BVLOS | Beyond Visual Line of Sight |
| ESC | Electronic Speed Controller |
| RH | Relative Humidity |
| RTH | Return to Home |
| SUAS | Small Unmanned Air System |
| TWI | Trade Wind Inversion |
| UAV | Unmanned Air Vehicle |
References
- Nisbet, E.G.; Dlugokencky, E.J.; Bousquet, P. Methane on the Rise-Again. Science 2014, 343, 493–495. [Google Scholar] [CrossRef] [PubMed]
- Dlugokencky, E.J.; Nisbet, E.G.; Fisher, R.; Lowry, D. Global atmospheric methane: Budget, changes and dangers. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2011, 369, 2058–2072. [Google Scholar] [CrossRef] [PubMed]
- Nisbet, E.G.; Dlugokencky, E.J.; Manning, M.R.; Lowry, D.; Fisher, R.E.; France, J.L.; Michel, S.E.; Miller, J.B.; White, J.W.C.; Vaughn, B.; et al. Rising Atmospheric Methane: 2007–2014 Growth and Isotopic Shift. Glob. Biogeochem. Cycles 2016, 30, 1356–1370. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Sam, L.; Akanksha; Martin-Torres, F.J.; Kumar, R. UAVs as remote sensing platform in glaciology: Present applications and future prospects. Remote Sens. Environ. 2016, 175, 196–204. [Google Scholar] [CrossRef]
- Pajares, G. Overview and Current Status of Remote Sensing Applications Based on Unmanned Aerial Vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–329. [Google Scholar] [CrossRef]
- Klemas, V.V. Coastal and Environmental Remote Sensing from Unmanned Aerial Vehicles: An Overview. J. Coast. Res. 2015, 31, 1260–1267. [Google Scholar] [CrossRef]
- Detweiler, C.; Ore, J.P.; Anthony, D.; Elbaum, S.; Burgin, A.; Lorenz, A. Bringing Unmanned Aerial Systems Closer to the Environment. Environ. Pract. 2015, 17, 188–200. [Google Scholar] [CrossRef]
- Vivoni, E.R.; Rango, A.; Anderson, C.A.; Pierini, N.A.; Schreiner-McGraw, A.P.; Saripalli, S.; Laliberte, A.S. Ecohydrology with unmanned aerial vehicles. Ecosphere 2014, 5, 1–14. [Google Scholar] [CrossRef]
- Fladeland, M.; Sumich, M.; Lobitz, B.; Kolyer, R.; Herlth, D.; Berthold, R.; McKinnon, D.; Monforton, L.; Brass, J.; Bland, G. The NASA SIERRA science demonstration programme and the role of small-medium unmanned aircraft for earth science investigations. Geocarto Int. 2011, 26, 157–163. [Google Scholar] [CrossRef]
- Tamminga, A.D.; Eaton, B.C.; Hugenholtz, C.H. UAS-based remote sensing of fluvial change following an extreme flood event. Earth Surf. Process. Landf. 2015, 40, 1464–1476. [Google Scholar] [CrossRef]
- Immerzeel, W.W.; Kraaijenbrink, P.D.A.; Shea, J.M.; Shrestha, A.B.; Pellicciotti, F.; Bierkens, M.F.P.; de Jong, S.M. High-resolution monitoring of Himalayan glacier dynamics using unmanned aerial vehicles. Remote Sens. Environ. 2014, 150, 93–103. [Google Scholar] [CrossRef]
- Zweig, C.L.; Burgess, M.A.; Percival, H.F.; Kitchens, W.M. Use of Unmanned Aircraft Systems to Delineate Fine-Scale Wetland Vegetation Communities. Wetlands 2015, 35, 303–309. [Google Scholar] [CrossRef]
- Stocker, C.; Eltner, A.; Karrasch, P. Measuring gullies by synergetic application of UAV and close range photogrammetry—A case study from Andalusia, Spain. Catena 2015, 132, 1–11. [Google Scholar] [CrossRef]
- Nagai, M.; Chen, T.; Shibasaki, R.; Kumagai, H.; Ahmed, A. UAV-Borne 3-D Mapping System by Multisensor Integration. IEEE Trans. Geosci. Remote Sens. 2009, 47, 701–708. [Google Scholar] [CrossRef]
- Peng, Z.R.; Wang, D.S.; Wang, Z.Y.; Gao, Y.; Lu, S.J. A study of vertical distribution patterns of PM2.5 concentrations based on ambient monitoring with unmanned aerial vehicles: A case in Hangzhou, China. Atmos. Environ. 2015, 123, 357–369. [Google Scholar] [CrossRef]
- Diaz, J.A.; Pieri, D.; Wright, K.; Sorensen, P.; Kline-Shoder, R.; Arkin, C.R.; Fladeland, M.; Bland, G.; Buongiorno, M.F.; Ramirez, C.; et al. Unmanned Aerial Mass Spectrometer Systems for in-Situ Volcanic Plume Analysis. J. Am. Soc. Mass Spectrom. 2015, 26, 292–304. [Google Scholar] [CrossRef] [PubMed]
- Alvarado, M.; Gonzalez, F.; Fletcher, A.; Doshi, A. Towards the Development of a Low Cost Airborne Sensing System to Monitor Dust Particles after Blasting at Open-Pit Mine Sites. Sensors 2015, 15, 19667–19687. [Google Scholar] [CrossRef] [PubMed]
- Martin, S.; Beyrich, F.; Bange, J. Observing Entrainment Processes Using a Small Unmanned Aerial Vehicle: A Feasibility Study. Bound.-Layer Meteorol. 2014, 150, 449–467. [Google Scholar] [CrossRef]
- Cassano, J.J. Observations of atmospheric boundary layer temperature profiles with a small unmanned aerial vehicle. Antarct. Sci. 2014, 26, 205–213. [Google Scholar] [CrossRef]
- Bates, T.S.; Quinn, P.K.; Johnson, J.E.; Corless, A.; Brechtel, F.J.; Stalin, S.E.; Meinig, C.; Burkhart, J.F. Measurements of atmospheric aerosol vertical distributions above Svalbard, Norway, using unmanned aerial systems (UAS). Atmos. Meas. Tech. 2013, 6, 2115–2120. [Google Scholar] [CrossRef]
- Reuder, J.; Jonassen, M.O.; Olafsson, H. The Small Unmanned Meteorological Observer SUMO: Recent Developments and Applications of a Micro-UAS for Atmospheric Boundary Layer Research. Acta Geophys. 2012, 60, 1454–1473. [Google Scholar] [CrossRef]
- Karion, A.; Sweeney, C.; Tans, P.; Newberger, T. AirCore: An Innovative Atmospheric Sampling System. J. Atmos. Ocean. Technol. 2010, 27, 1839–1853. [Google Scholar] [CrossRef]
- Villa, T.; Gonzalez, F.; Miljievic, B.; Ristovski, Z.; Morawska, L. An Overview of Small Unmanned Aerial Vehicles for Air Quality Measurements: Present Applications and Future Prospectives. Sensors 2016, 16, 1072. [Google Scholar] [CrossRef] [PubMed]
- Brady, J.; Stokes, M.; Bonnardel, J.; Bertram, T. Characterization of a Quadrotor Unmanned Aircraft System for Aerosol-Particle-Concentration Measurements. Environ. Sci. Technol. 2016, 50, 1376–1383. [Google Scholar] [CrossRef] [PubMed]
- Roldan, J.; Joossen, G.; Sanz, D.; Cerro, J.; Barrientos, A. Mini-UAV Based Sensory System for Measuring Environmental Variables in Greenhouses. Sensors 2015, 15, 3334–3350. [Google Scholar] [CrossRef] [PubMed]
- Detert, M.; Weitbrecht, V. A low-cost airborne velocimetry system: Proof of concept. J. Hydraul. Res. 2015, 53, 532–539. [Google Scholar] [CrossRef]
- Hill, S.L.; Clemens, P. Miniaturization of High-Spectral-Spatial Resolution Hyperspectral Imagers on Unmanned Aerial Systems. Proc. SPIE 2015, 9482. [Google Scholar] [CrossRef]
- Wildmann, N.; Mauz, M.; Bange, J. Two fast temperature sensors for probing of the atmospheric boundary layer using small remotely piloted aircraft (RPA). Atmos. Meas. Tech. 2013, 6, 2101–2113. [Google Scholar] [CrossRef]
- Thornberry, T.D.; Rollins, A.W.; Gao, R.S.; Watts, L.A.; Ciciora, S.J.; McLaughlin, R.J.; Fahey, D.W. A two-channel, tunable diode laser-based hygrometer for measurement of water vapor and cirrus cloud ice water content in the upper troposphere and lower stratosphere. Atmos. Meas. Tech. 2015, 8, 211–224. [Google Scholar] [CrossRef]
- Corrigan, C.E.; Roberts, G.C.; Ramana, M.V.; Kim, D.; Ramanathan, V. Capturing vertical profiles of aerosols and black carbon over the Indian Ocean using autonomous unmanned aerial vehicles. Atmos. Chem. Phys. 2008, 8, 737–747. [Google Scholar] [CrossRef]
- Ramana, M.V.; Ramanathan, V.; Kim, D.; Roberts, G.C.; Corrigan, C.E. Albedo, atmospheric solar absorption and heating rate measurements with stacked UAVs. Q. J. R. Meteorol. Soc. 2007, 133, 1913–1931. [Google Scholar] [CrossRef]
- De Boer, G.; Palo, S.; Argrow, B.; LoDolce, G.; Mack, J.; Gao, R.S.; Telg, H.; Trussel, C.; Fromm, J.; Long, C.N.; et al. The Pilatus unmanned aircraft system for lower atmospheric research. Atmos. Meas. Tech. 2016, 9, 1845–1857. [Google Scholar] [CrossRef]
- Freitag, S.; Clarke, A.D.; Howell, S.G.; Kapustin, V.N.; Campos, T.; Brekhovskikh, V.L.; Zhou, J. Combining airborne gas and aerosol measurements with HYSPLIT: A visualization tool for simultaneous evaluation of air mass history and back trajectory consistency. Atmos. Meas. Tech. 2014, 7, 107–128. [Google Scholar] [CrossRef]
- Chambers, S.D.; Zahorowski, W.; Williams, A.G.; Crawford, J.; Griffiths, A.D. Identifying tropospheric baseline air masses at Mauna Loa Observatory between 2004 and 2010 using Radon-222 and back trajectories. J. Geophy. Res. Atmos. 2013, 118, 992–1004. [Google Scholar] [CrossRef]
- Saunois, M.; Bousquet, P.; Poulter, B.; Peregon, A.; Ciais, P.; Canadell, J.G.; Dlugokencky, E.J.; Etiope, G.; Bastviken, D.; Houweling, S.; et al. The Global Methane Budget: 2000–2012. Earth Syst. Sci. Data Discuss. 2016, 2016, 1–79. [Google Scholar] [CrossRef]
- Watai, T.; Machida, T.; Ishizaki, N.; Inoue, G. A Lightweight Observation System for Atmospheric Carbon Dioxide Concentration Using a Small Unmanned Aerial Vehicle. J. Atmos. Ocean. Technol. 2006, 23, 700–710. [Google Scholar] [CrossRef]
- Katsaros, K.B.; Decosmo, J.; Lind, R.J.; Anderson, R.J.; Smith, S.D.; Kraan, R.; Oost, W.; Uhlig, K.; Mestayer, P.G.; Larsen, S.E.; et al. Measurements of Humidity and Temperature in the Marine Environment during the HEXOS Main Experiment. Atmos. Ocean. Technol. 1994, 11, 964. [Google Scholar] [CrossRef]
- Wildmann, N.; Kaufmann, F.; Bange, J. An inverse-modelling approach for frequency response correction of capacitive humidity sensors in ABL research with small remotely piloted aircraft (RPA). Atmos. Meas. Tech. 2014, 7, 3059–3069. [Google Scholar] [CrossRef]
- Chen, R. A Survey of Nonuniform Inflow Models for Rotorcraft Flight Dynamics and Control Applications; National Aeronautics and Space Administration: Washington, DC, USA, 1989. [Google Scholar]
- Lowry, D.; Fisher, R.; France, J.; Lanoiselle, M.; Nisbet, E.; Brunke, E.; Dlugokencky, E.; Brough, N.; Jones, A. Continuous monitoring of greenhouse gases in the South Atlantic And Southern Ocean: Contributions from the equianos network. In Proceedings of the 17th WMO/IAEA Meeting of Experts on Carbon Dioxide, Other Greenhouse Gases and related Tracers Measurement Techniques, Beijing, China, 10–13 June 2013; Volume 213, pp. 109–112. [Google Scholar]
- Greatwood, C.; Richardson, T.; Freer, J.; Thomas, R.; Brownlow, R.; Lowry, D.; Fisher, R.E.; Nisbet, E. Automatic Path Generation for Multirotor Descents Through Varying Air Masses above Ascension Island. In Proceedings of the AIAA SciTech Forum, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Padfield, G.D. Helicopter Flight Dynamics; John Wiley & Sons: Chichester, UK, 2008. [Google Scholar]
- Anderson, S.; Baumgartner, M. Radiative Heating Errors in Naturally Ventilated Air Temperature Measurements Made from Buoys. J. Atmos. Ocean. Technol. 1998, 15, 157–173. [Google Scholar] [CrossRef]
- Hennemuth, B.; Lammert, A. Determination of the Atmospheric Boundary Layer Height from Radiosonde and Lidar Backscatter. Bound.-Layer Meteorol. 2006, 120, 181–200. [Google Scholar] [CrossRef]
- Dai, C.; Wang, Q.; Kalogiros, J.A.; Lenschow, D.H.; Gao, Z.; Zhou, M. Determining Boundary-Layer Height from Aircraft Measurements. Bound.-Layer Meteorol. 2014, 152, 277–302. [Google Scholar] [CrossRef]
- Brownlow, R.; Lowry, D.; Thomas, R.M.; Fisher, R.E.; France, J.L.; Cain, M.; Richardson, T.S.; Greatwood, C.; Freer, J.; Pyle, J.A.; et al. Methane mole fraction and δ13C above and below the Trade Wind Inversion at Ascension Island in air sampled by aerial robotics. Geophys. Res. Lett. 2016, 43, 11893–11902. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maximum Take Off Weight (MTOW) (inc. batteries) | 10 kg |
| Diagonal rotor-rotor distance | 1.07 m |
| Maximum battery capacity | 32,000 mAh 6-cell Lithium Polymer |
| Motors | T-Motor MN3515 400 KV |
| Propellers | T-Motor 16x5.4" |
| Electronic Speed Controllers (ESC) | RCTimer NFS ESC 45 A (OPTO) |
| Autopilot | Pixhawk by 3DRobotics |
| Autopilot software | ArduCopter v3.1.5 |
| Safety pilot control link | FrSky L9R 2.4 GHz |
| Ground Control Station (GCS) link | Ubiquiti 5-GHz directional |
| Onboard computing | BeagleBone Black |
| Sampling pump | KNF Diaphragm pump (NMP 850 KNDC) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Greatwood, C.; Richardson, T.S.; Freer, J.; Thomas, R.M.; MacKenzie, A.R.; Brownlow, R.; Lowry, D.; Fisher, R.E.; Nisbet, E.G. Atmospheric Sampling on Ascension Island Using Multirotor UAVs. Sensors 2017, 17, 1189. https://doi.org/10.3390/s17061189
Greatwood C, Richardson TS, Freer J, Thomas RM, MacKenzie AR, Brownlow R, Lowry D, Fisher RE, Nisbet EG. Atmospheric Sampling on Ascension Island Using Multirotor UAVs. Sensors. 2017; 17(6):1189. https://doi.org/10.3390/s17061189
Chicago/Turabian StyleGreatwood, Colin, Thomas S. Richardson, Jim Freer, Rick M. Thomas, A. Rob MacKenzie, Rebecca Brownlow, David Lowry, Rebecca E. Fisher, and Euan G. Nisbet. 2017. "Atmospheric Sampling on Ascension Island Using Multirotor UAVs" Sensors 17, no. 6: 1189. https://doi.org/10.3390/s17061189
APA StyleGreatwood, C., Richardson, T. S., Freer, J., Thomas, R. M., MacKenzie, A. R., Brownlow, R., Lowry, D., Fisher, R. E., & Nisbet, E. G. (2017). Atmospheric Sampling on Ascension Island Using Multirotor UAVs. Sensors, 17(6), 1189. https://doi.org/10.3390/s17061189