
Location-Enhanced Activity Recognition in Indoor Environments Using Off the Shelf Smart Watch Technology and BLE Beacons

Abstract
:1. Introduction
2. Related Work
- Indoor space: The type of indoor space the activity recognition experiments were carried out in, such as a home, a laboratory or another environment.
- IMU sensors: The different IMU sensors that were used by a classifier to infer a participant’s activity.
- Classification approach: What machine learning classification algorithms were used in the approach to estimate the activity performed by a participant.
- Commercial-Off-The Shelf (COTS): Whether the devices used in the experiments are widely accessible and available to an end user.
2.1. Activity Recognition Using COTS
2.2. Activity Recognition with Custom Devices
2.3. Location-Enhanced HAR
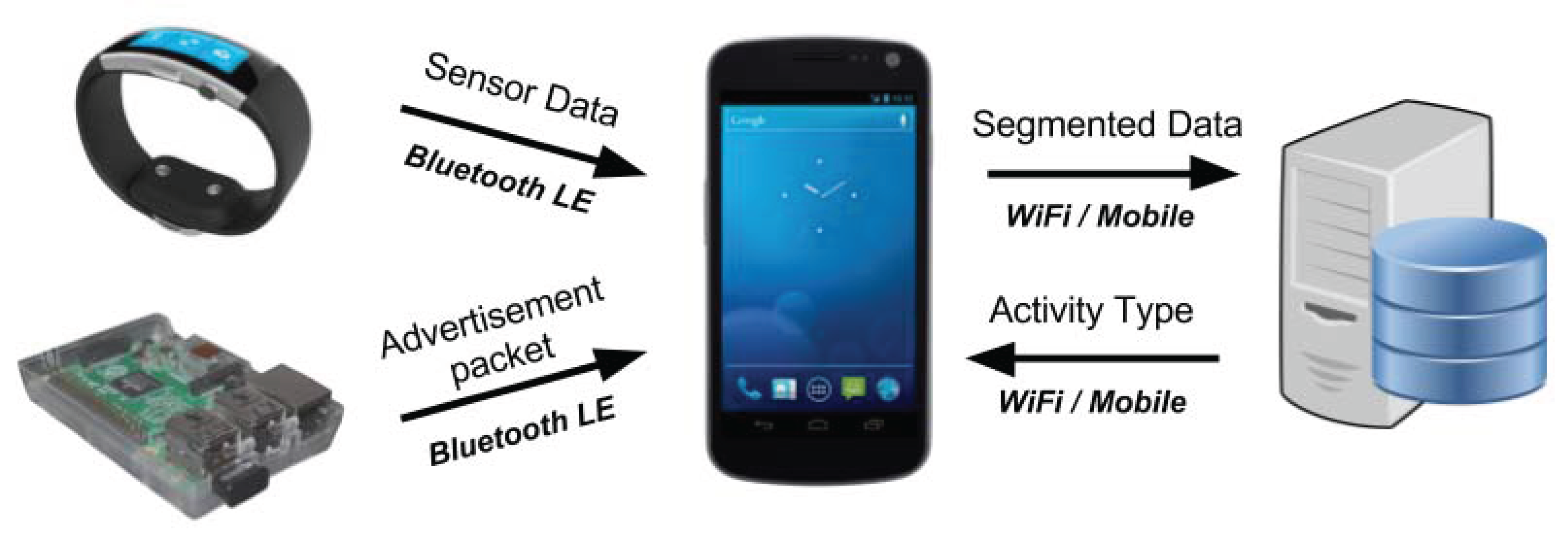
3. System Architecture
3.1. Smart Watch
3.2. BLE Beacons
3.3. Mobile Application
3.4. Server
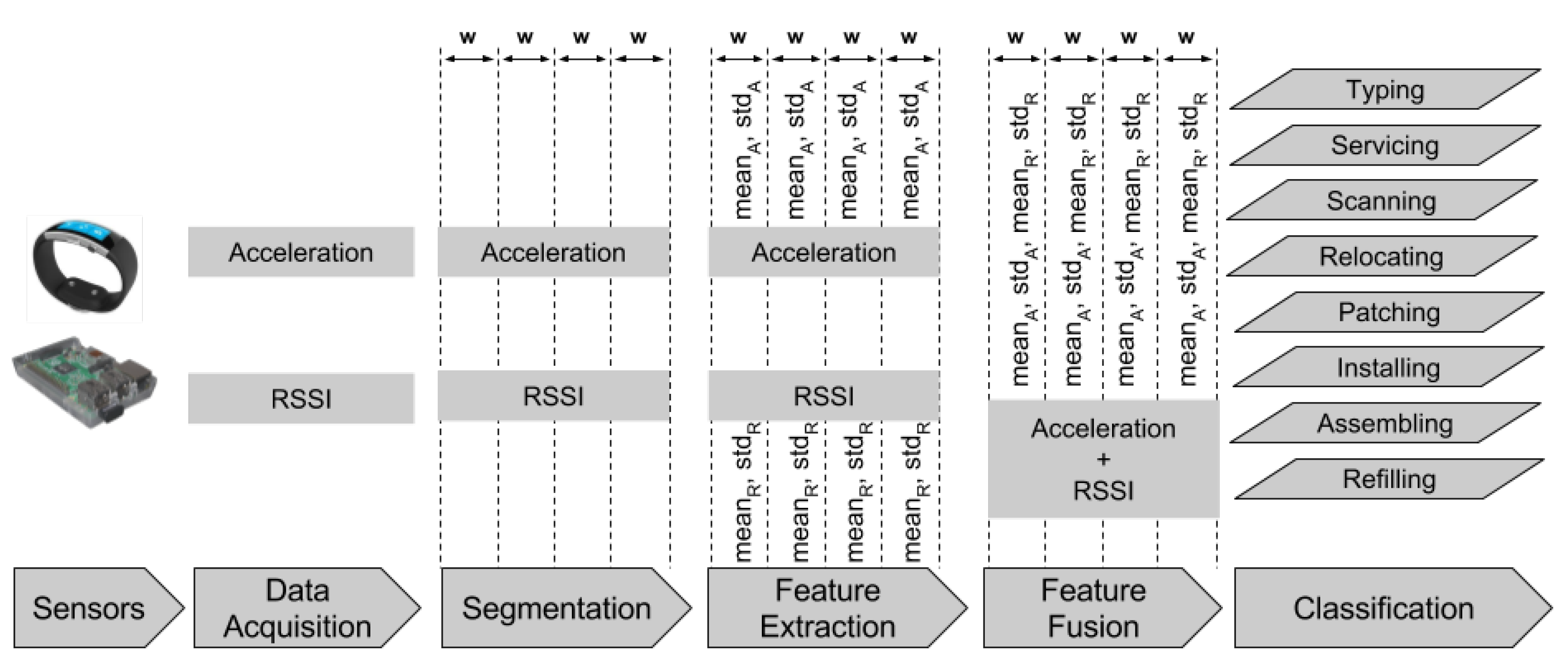
4. Activity Recognition Chain
- Type 1: mean and standard deviation.
- Type 2: mean, standard deviation, minimum, maximum and mean crossing rate.
5. Experimental Setup
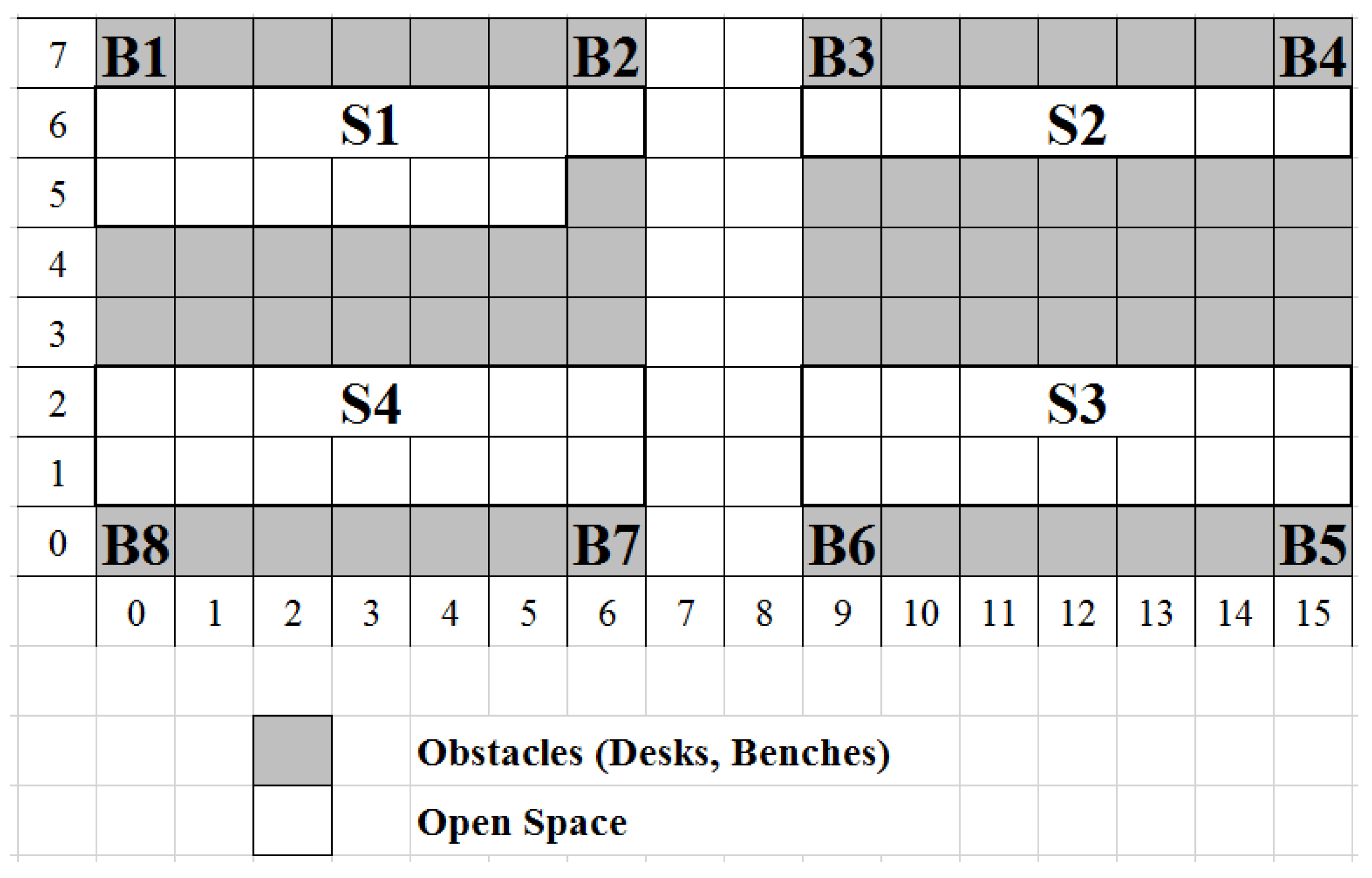
5.1. Beacon Deployment
5.2. Laboratory Activities
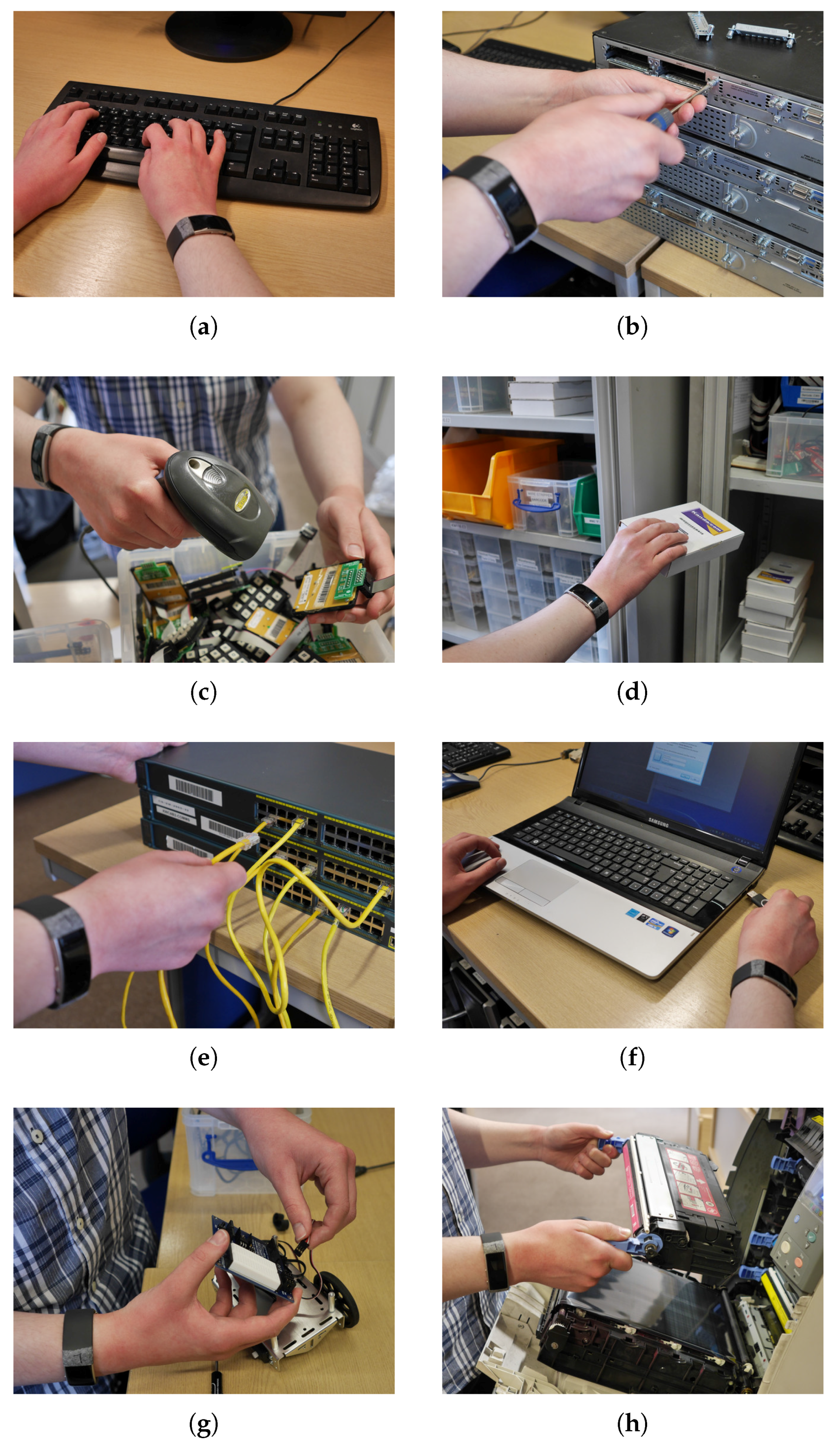
- Typing: When conducting this activity, the participants used a standard desktop-style computer located in the laboratory, as depicted in Figure 6a. The computer was prepared with randomly-chosen excerpts at the top of the screen with a word processing application at the bottom of the screen. Then, the participants simply needed to type the text into the word processor.
- Servicing: In this activity, the participants were performing servicing tasks on computer equipment by removing and replacing service panels and changing over individual components. This is illustrated in Figure 6b. More specifically, the participants were exchanging components in the network router units by unscrewing the service panels.
- Scanning: For this activity, depicted in Figure 6c, the participants were asked to scan large amounts of small embedded components (LCD screens, keypads, sensors units, etc.) with applied bar codes using a hand-held scanner. This activity would be typically performed when loaning equipment to students or staff or when taking a stock check. Additionally, the participants were only asked to use their dominant hand to hold the scanner when performing this activity.
- Relocating: This activity consisted of moving large volumes of equipment from one storage location to another, as shown in Figure 6d. When performing this activity, the participants were only told to move one piece of equipment at a time. All equipment relocated by the participants could be grasped using only one hand.
- Patching: Within this activity, the participants were presented with multiple network switches accompanied by enough Ethernet cables to be inserted into every port of the switches. Figure 6e illustrates this setup. Each participant was instructed to patch in the Ethernet cables across the multiple switches in any way he/she wished. Additionally, the supplied Ethernet cables were not of equal length.
- Installing: This activity involved the installation of various software packages on a laptop, as shown in Figure 6f. Moreover, the laptop was turned on and was prepared with none of the software packages installed. Then, each participant was supplied with a USB flash drive containing the installers for the software packages and was only instructed on the order in which the packages should be installed.
- Assembling: When conducting this activity, depicted in Figure 6g, the participants were presented with a small dismantled vehicular robot with brief assembling instructions and a basic toolkit. Only required parts and tools were supplied; no additional equipment was given. The only instruction given to each participant was to assemble the robot using the tools and instructions provided.
- Refilling: In this activity, the participants were performing maintenance on two printers located in the laboratory. More specifically, as Figure 6h illustrates, the participants were asked to replace the various printer cartridges. To perform this activity, the participants were required to open the service panel of the printer and then replace the old cartridge with a new cartridge. Finally, the participant would close the service panel of the printer. No tools were required to open and close the service panel of the printer.
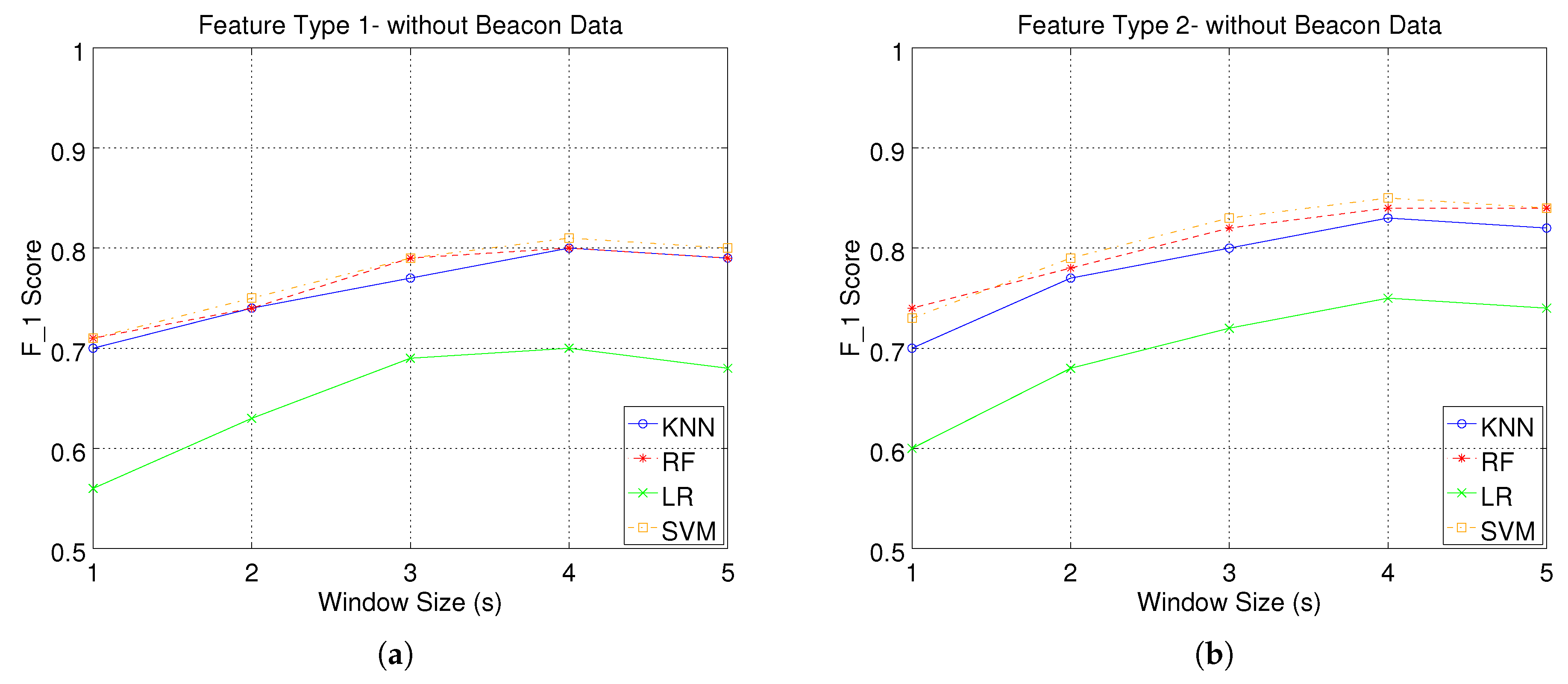
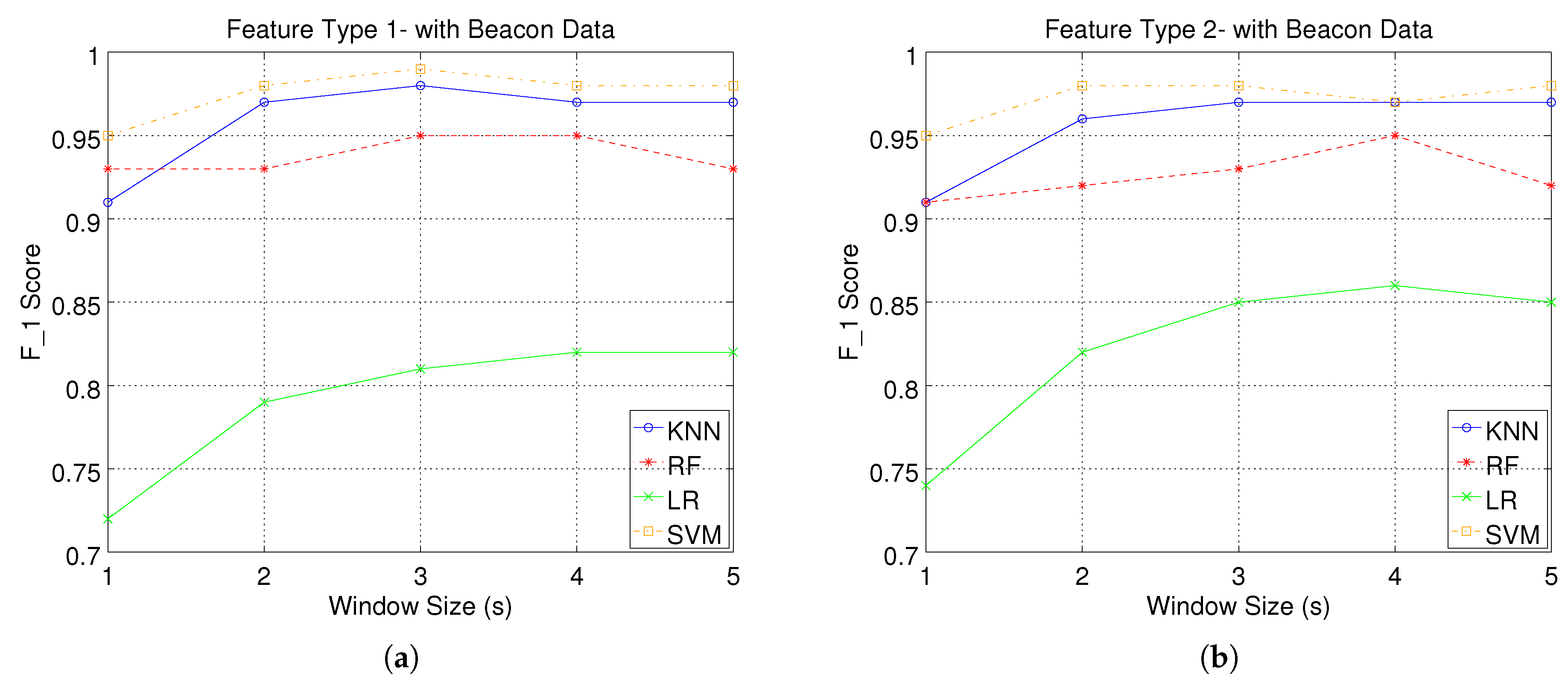
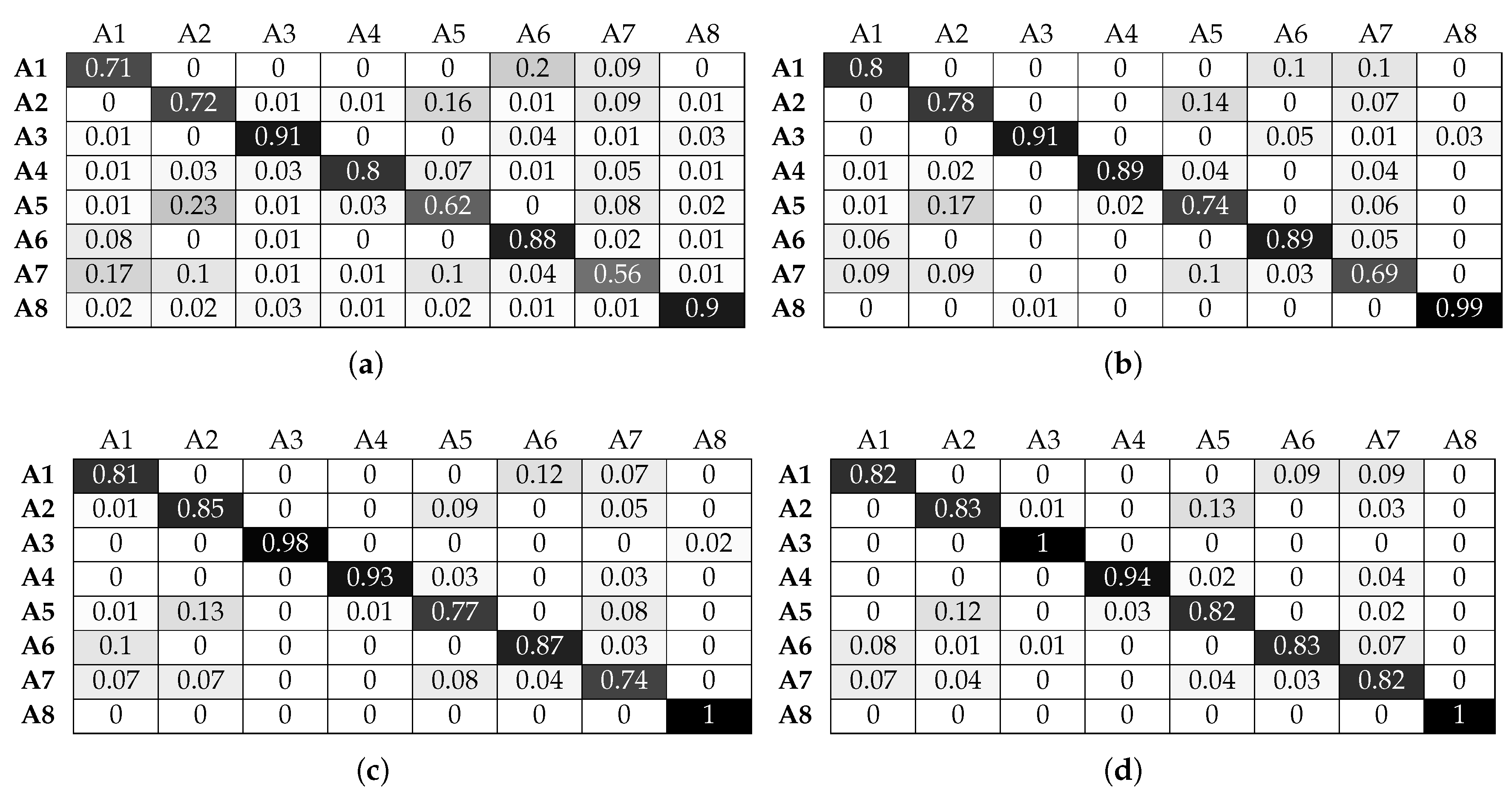
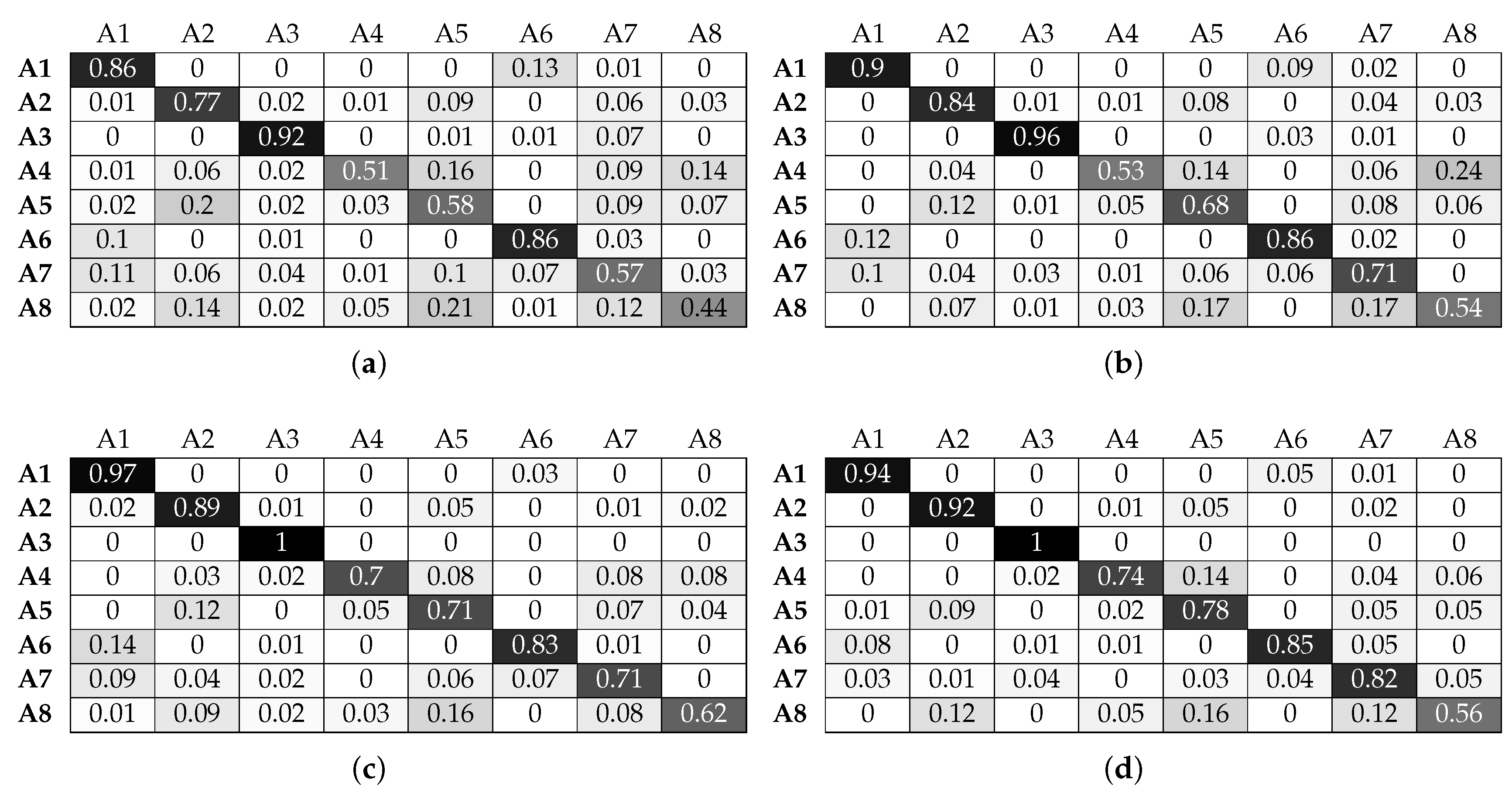
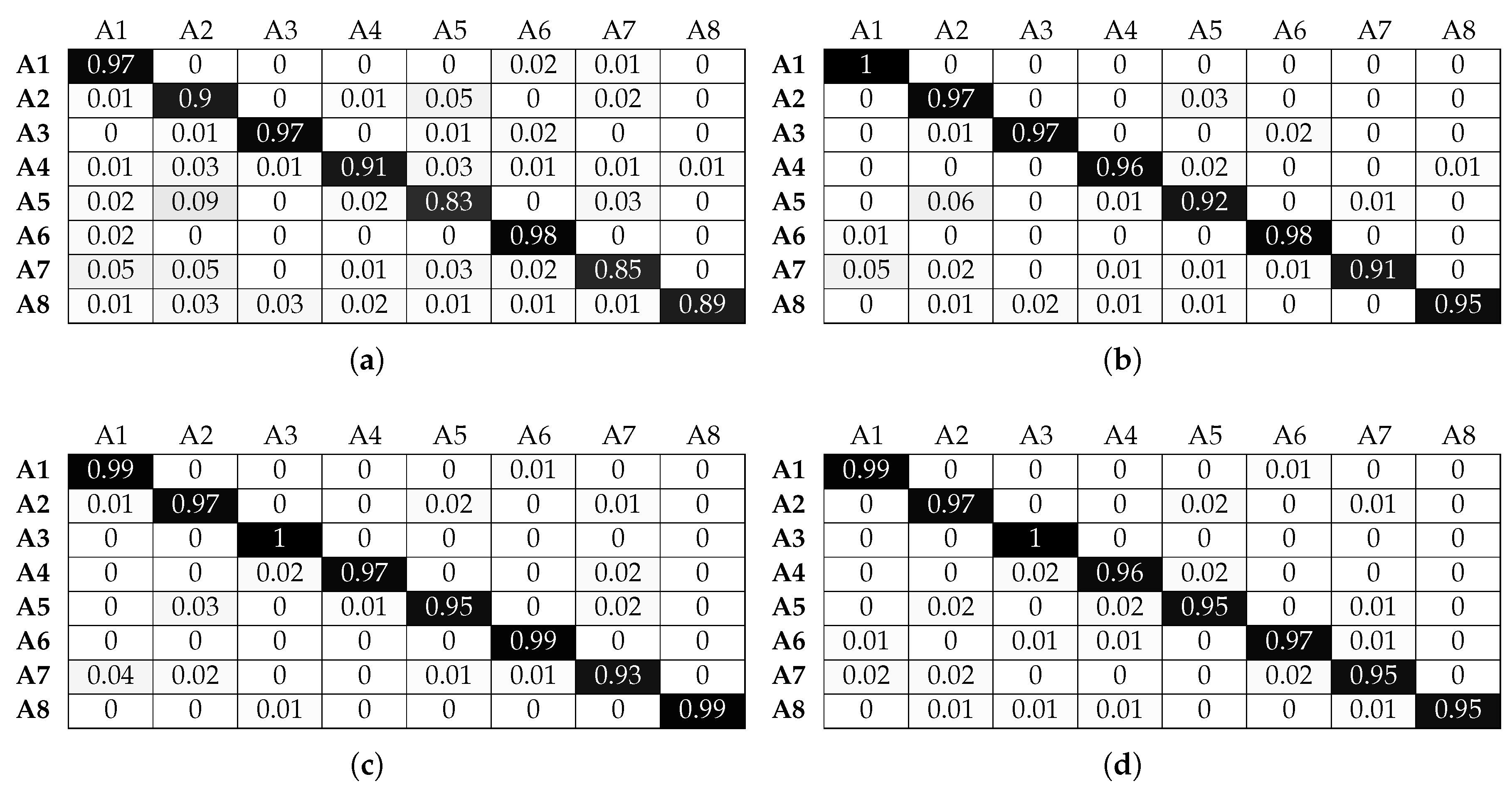
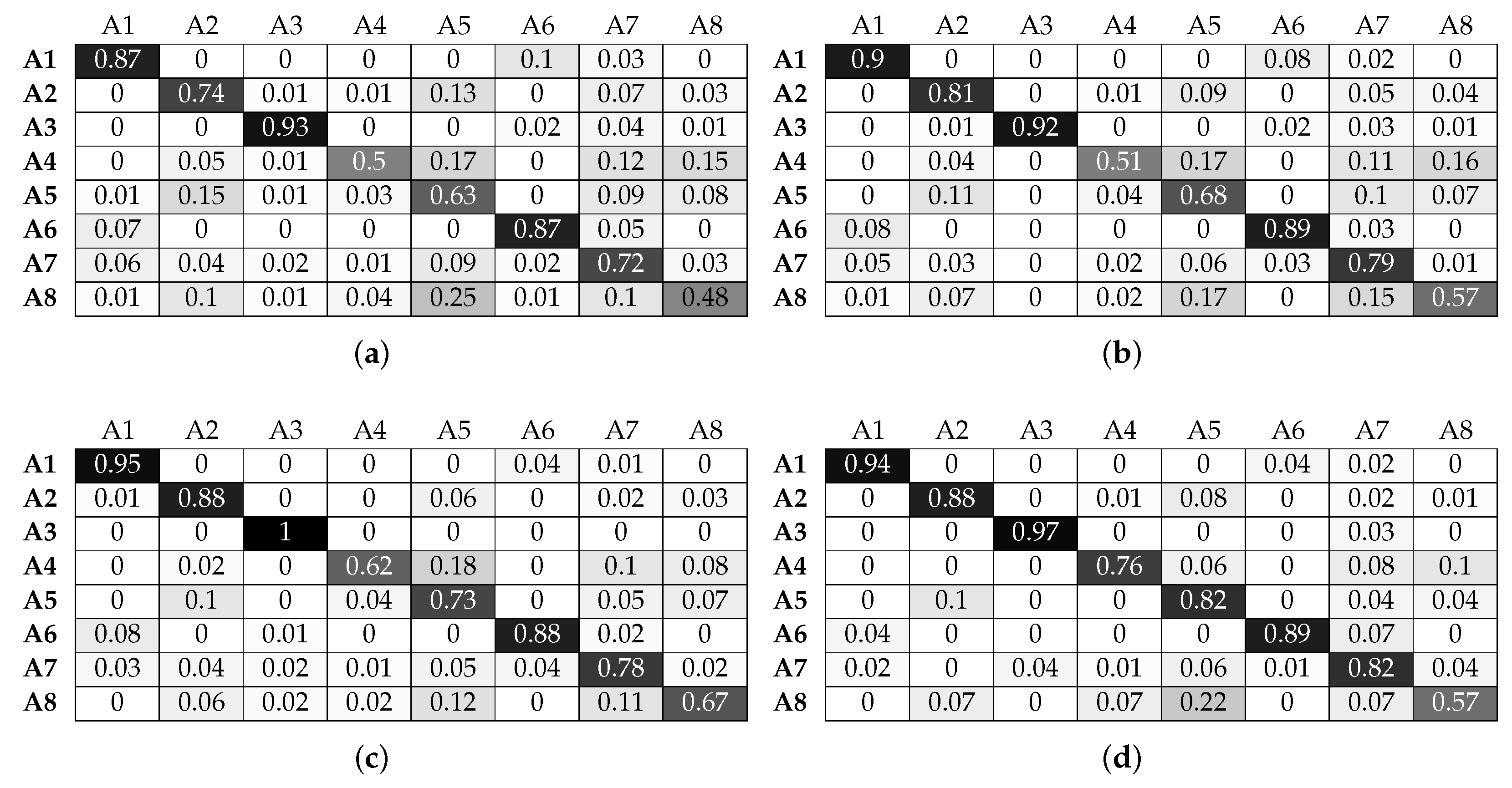
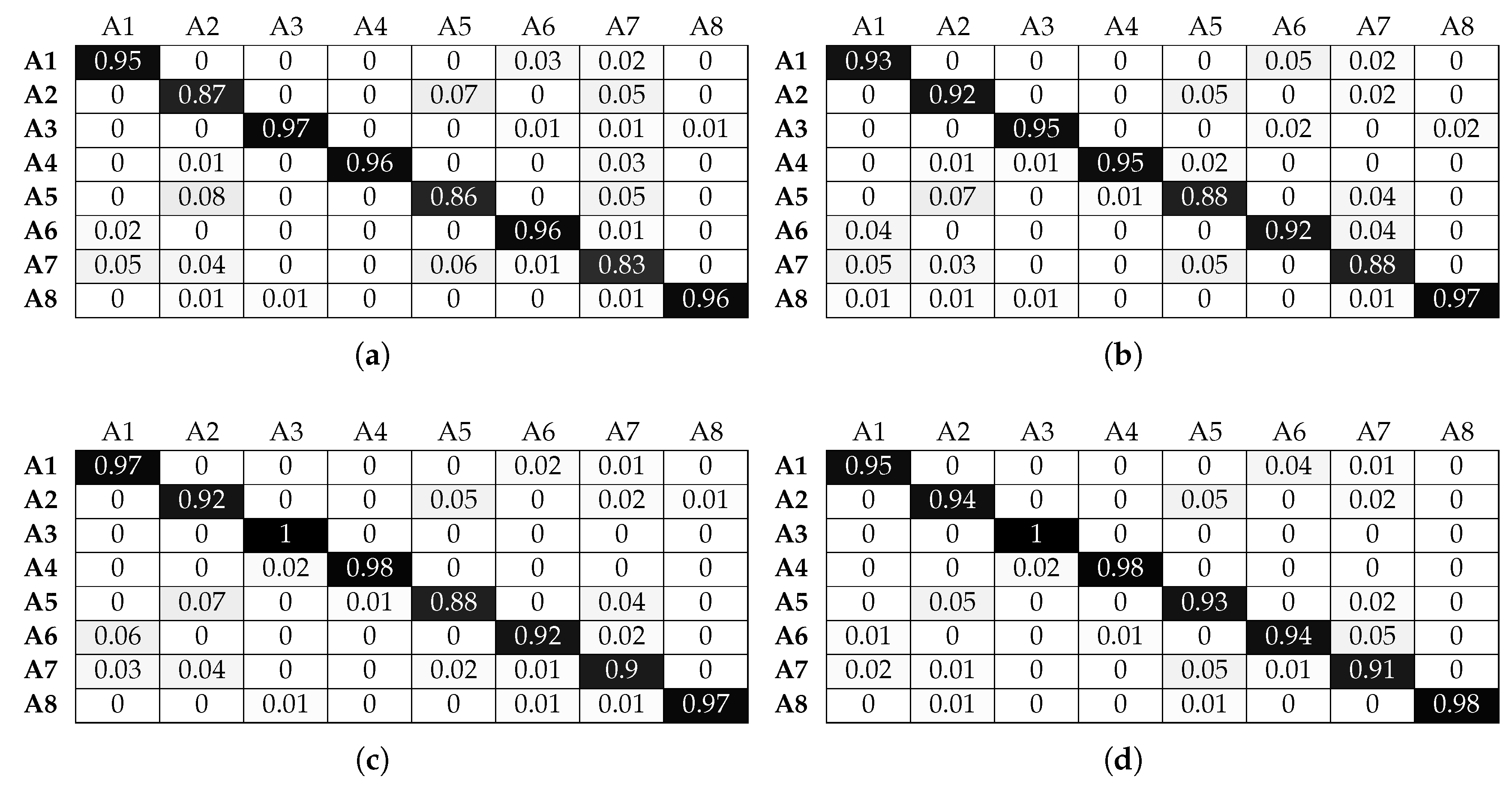
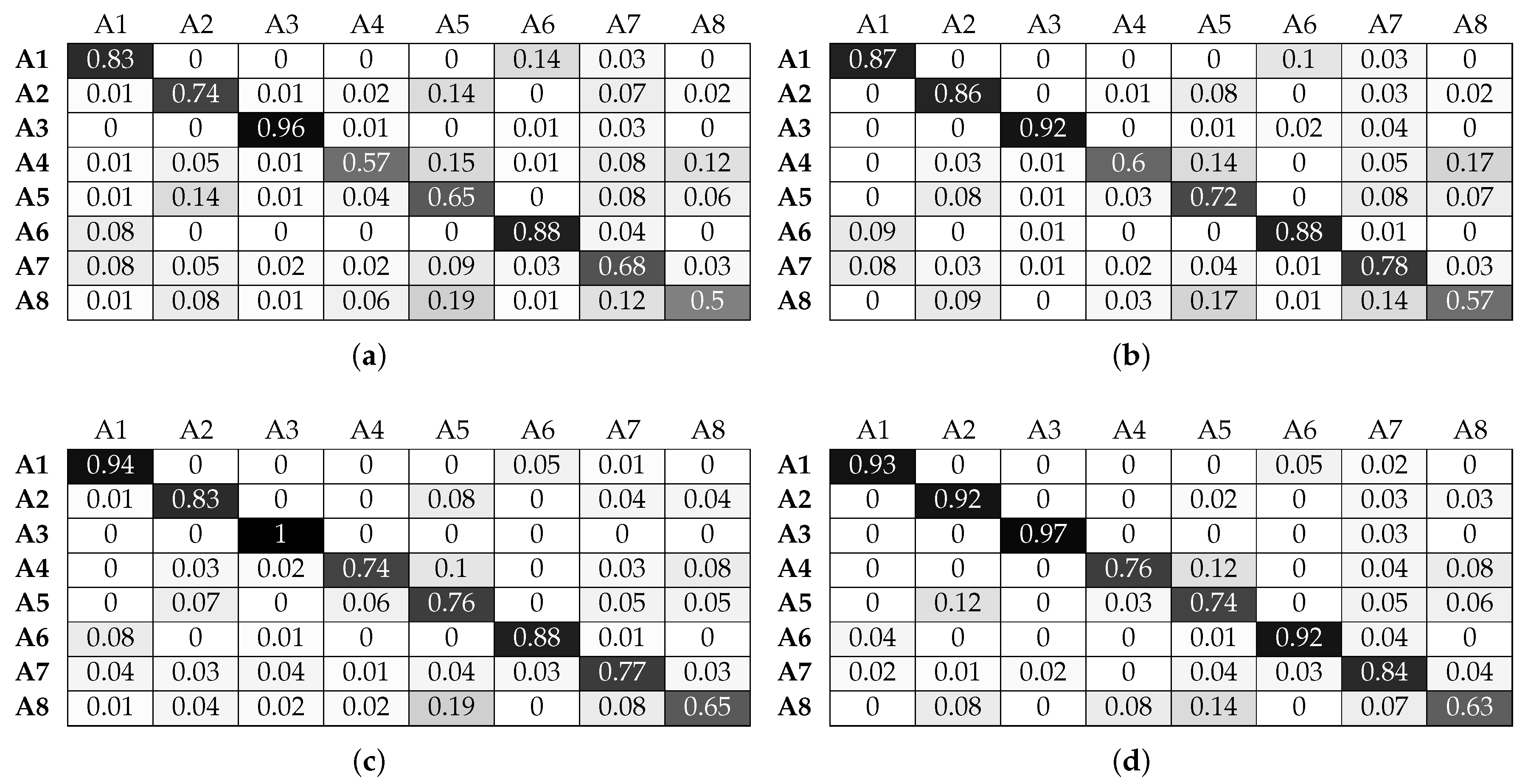
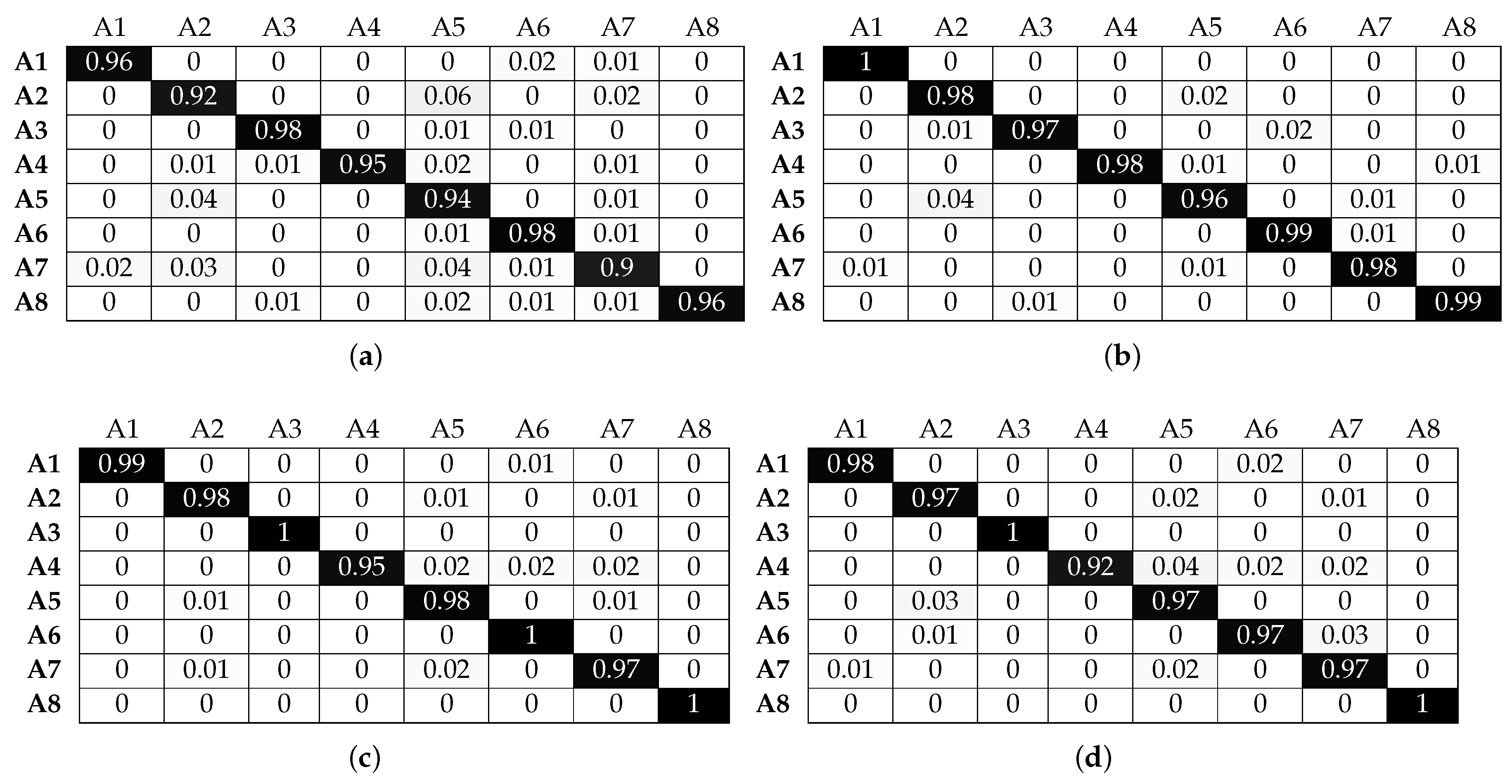
6. Results
6.1. Overview of Results
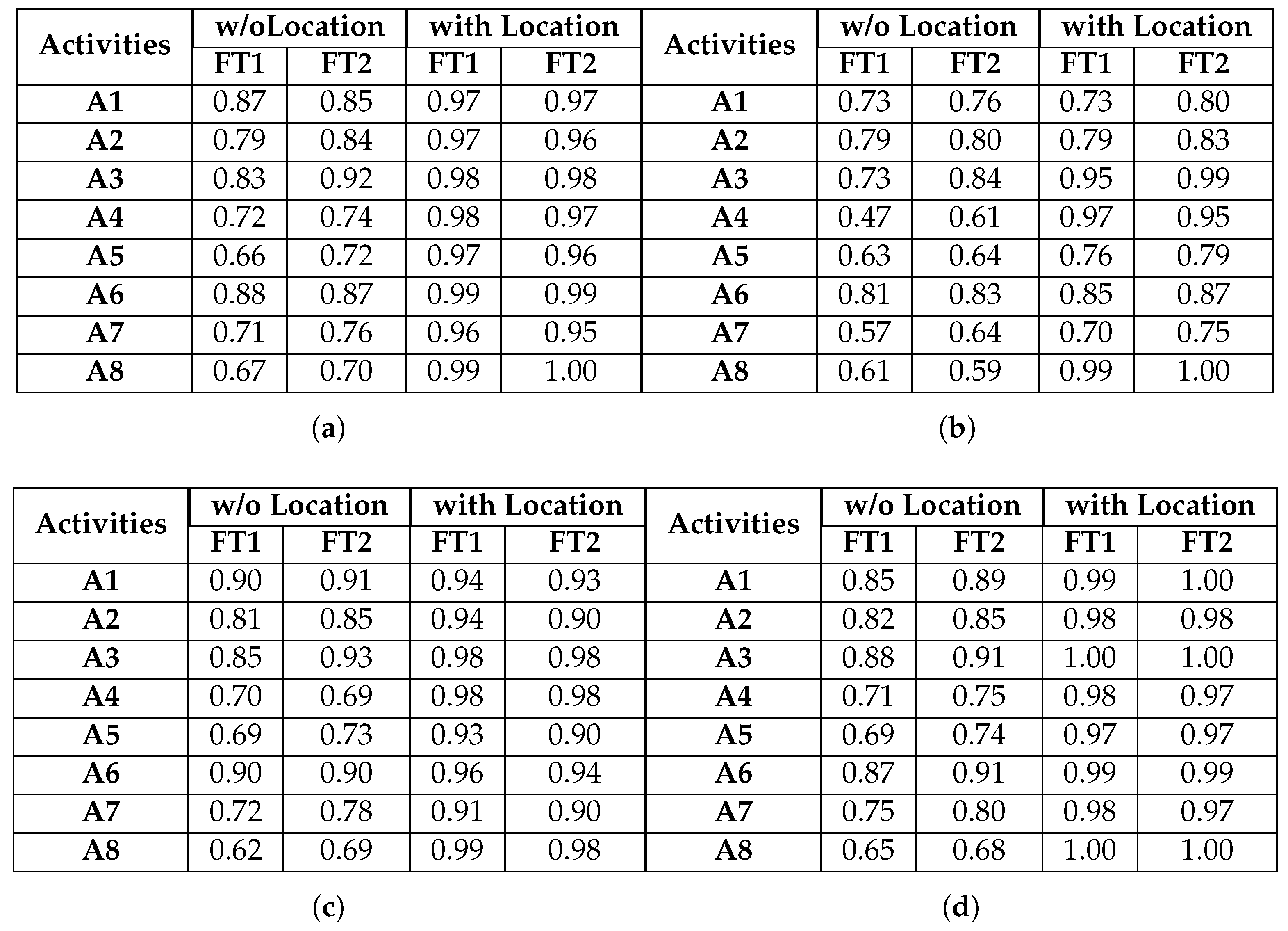
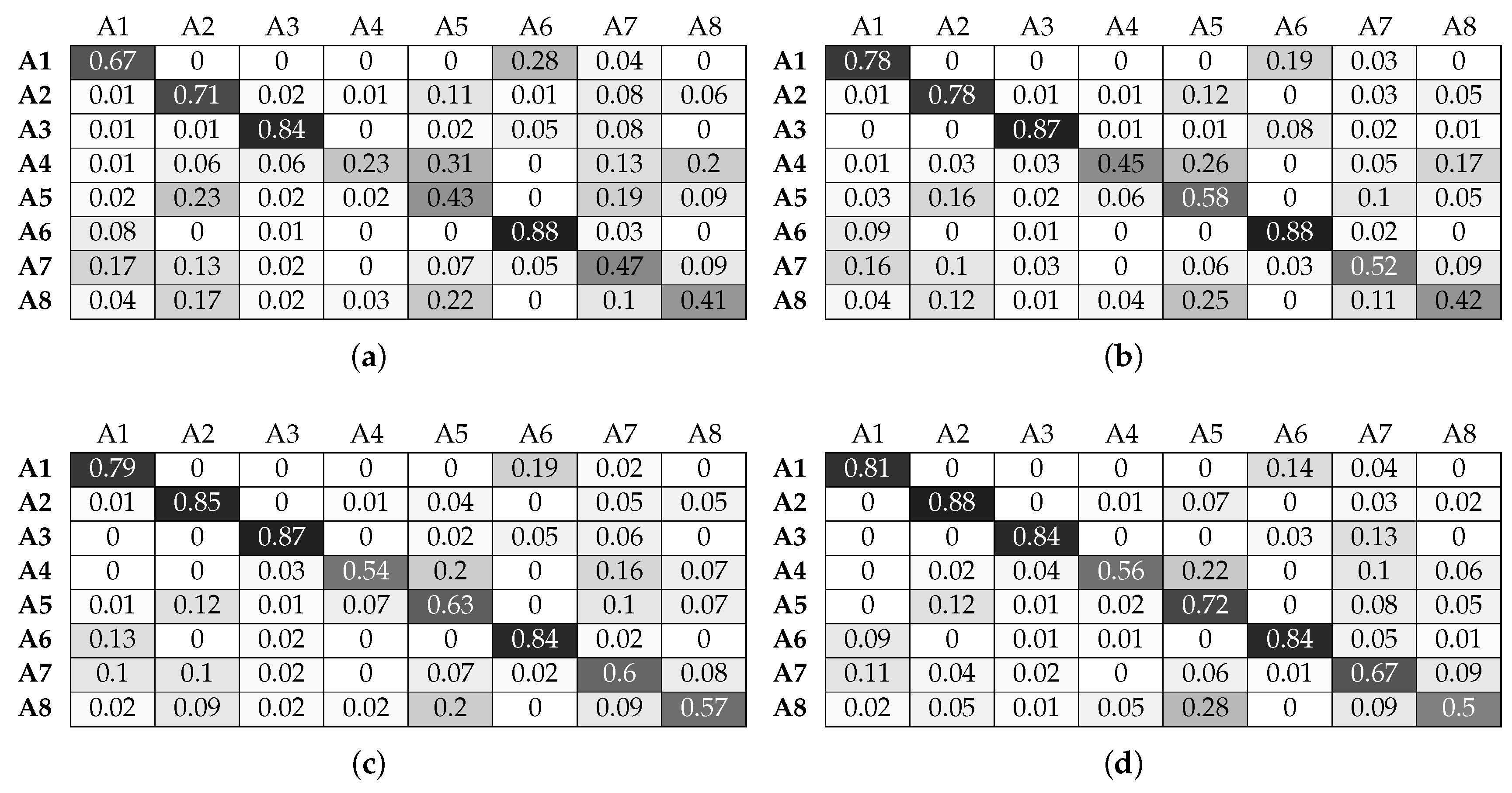
6.2. Evaluation of Individual Activities
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ANN | Artificial Neural Networks |
| AP | Access Point |
| API | Application Program Interface |
| BLE | Bluetooth Low Energy |
| COTS | Commercial-Off-The-Shelf |
| CRF | Conditional Random Field |
| DT | Decision Trees |
| EP | Emerging Pattern |
| GNSS | Global Navigation Satellite System |
| HAR | Human Activity Recognition |
| HMM | Hidden Markov Models |
| IMU | Inertial Measurement Unit |
| IPS | Indoor Positioning System |
| NB | Naive Bayes |
| KNN | K-Nearest Neighbours |
| LR | Logistic Regression |
| MLP | Multi-Layer Perceptron |
| RF | Random Forests |
| RSSI | Received Signal Strength Indicator |
| SNR | Signal-to-Noise Ratio |
| SVM | Support Vector Machines |
| UUID | Universally Unique Identifier |
References
- Zhang, Q.; Su, Y.; Yu, P. Assisting an elderly with early dementia using wireless sensors data in smarter safer home. In Proceedings of the International Conference on Informatics and Semiotics in Organisations, Shanghai, China, 23–35 May 2014; pp. 398–404. [Google Scholar]
- Suryadevara, N.K.; Mukhopadhyay, S.C.; Wang, R.; Rayudu, R. Forecasting the behavior of an elderly using wireless sensors data in a smart home. Eng. Appl. Artif. Intell. 2013, 26, 2641–2652. [Google Scholar] [CrossRef]
- Han, Y.; Han, M.; Lee, S.; Sarkar, A.; Lee, Y.K. A framework for supervising lifestyle diseases using long-term activity monitoring. Sensors 2012, 12, 5363–5379. [Google Scholar] [CrossRef] [PubMed]
- Zhu, C.; Sheng, W. Motion-and location-based online human daily activity recognition. Pervasive Mob. Comput. 2011, 7, 256–269. [Google Scholar] [CrossRef]
- Kim, S.C.; Jeong, Y.S.; Park, S.O. RFID-based indoor location tracking to ensure the safety of the elderly in smart home environments. Pers. Ubiquitous Comput. 2013, 17, 1699–1707. [Google Scholar] [CrossRef]
- Statista. Global Smartwatch Unit Sales 2014–2018|Statistic. Available online: https://www.statista.com/ statistics/538237/global-smartwatch-unit-sales/ (accessed on 22 February 2017).
- The Hitchhikers Guide to iBeacon Hardware: A Comprehensive Report by Aislelabs. Available online: http://www.aislelabs.com/reports/beacon-guide/ (accessed on 31 March 2017).
- Filippoupolitis, A.; Takand, B.; Loukas, G. Activity Recognition in a Home Setting Using Off the Shelf Smart Watch Technology. In Proceedings of the 2016 15th International Conference on Ubiquitous Computing and Communications and 2016 International Symposium on Cyberspace and Security (IUCC-CSS), Granada, Spain, 14–16 December 2016; pp. 39–44. [Google Scholar]
- Cornacchia, M.; Ozcan, K.; Zheng, Y.; Velipasalar, S. A Survey on Activity Detection and Classification Using Wearable Sensors. IEEE Sens. J. 2017, 17, 386–403. [Google Scholar] [CrossRef]
- Lara, O.D.; Labrador, M.A. A survey on human activity recognition using wearable sensors. IEEE Commun. Surv. Tutor. 2013, 15, 1192–1209. [Google Scholar] [CrossRef]
- Trost, S.G.; Zheng, Y.; Wong, W.K. Machine learning for activity recognition: Hip versus wrist data. Physiol. Meas. 2014, 35, 2183. [Google Scholar] [CrossRef] [PubMed]
- Dieu, O.; Mikulovic, J.; Fardy, P.S.; Bui-Xuan, G.; Béghin, L.; Vanhelst, J. Physical activity using wrist-worn accelerometers: Comparison of dominant and non-dominant wrist. Clin. Physiol. Funct. Imaging 2016. [Google Scholar] [CrossRef] [PubMed]
- Kefer, K.; Holzmann, C.; Findling, R.D. Comparing the Placement of Two Arm-Worn Devices for Recognizing Dynamic Hand Gestures. In Proceedings of the ACM 14th International Conference on Advances in Mobile Computing and Multi Media, Singapore, 28–30 November 2016; pp. 99–104. [Google Scholar]
- Gjoreski, M.; Gjoreski, H.; Luštrek, M.; Gams, M. How accurately can your wrist device recognize daily activities and detect falls? Sensors 2016, 16, 800. [Google Scholar] [CrossRef] [PubMed]
- Weiss, G.M.; Timko, J.L.; Gallagher, C.M.; Yoneda, K.; Schreiber, A.J. Smartwatch-based activity recognition: A machine learning approach. In Proceedings of the 2016 IEEE-EMBS International Conference on Biomedical and Health Informatics (BHI), Las Vegas, NV, USA, 24–27 February 2016; pp. 426–429. [Google Scholar]
- Sen, S.; Subbaraju, V.; Misra, A.; Balan, R.K.; Lee, Y. The case for smartwatch-based diet monitoring. In Proceedings of the 2015 IEEE International Conference on Pervasive Computing and Communication Workshops (PerCom Workshops), St. Louis, MO, USA, 23–27 March 2015; pp. 585–590. [Google Scholar]
- Radhakrishnan, M.; Eswaran, S.; Misra, A.; Chander, D.; Dasgupta, K. Iris: Tapping wearable sensing to capture in-store retail insights on shoppers. In Proceedings of the 2016 IEEE International Conference on Pervasive Computing and Communications (PerCom), Sydney, NSW, Australia, 14–19 March 2016; pp. 1–8. [Google Scholar]
- Rawassizadeh, R.; Tomitsch, M.; Nourizadeh, M.; Momeni, E.; Peery, A.; Ulanova, L.; Pazzani, M. Energy-Efficient Integration of Continuous Context Sensing and Prediction into Smartwatches. Sensors 2015, 15, 22616–22645. [Google Scholar] [CrossRef] [PubMed]
- Bai, L.; Efstratiou, C.; Ang, C.S. weSport: Utilising wrist-band sensing to detect player activities in basketball games. In Proceedings of the 2016 IEEE International Conference on Pervasive Computing and Communication Workshops, Sydney, NSW, Australia, 14–19 March 2016; pp. 1–6. [Google Scholar]
- Garcia-Ceja, E.; Brena, R.F.; Carrasco-Jimenez, J.C.; Garrido, L. Long-term activity recognition from wristwatch accelerometer data. Sensors 2014, 14, 22500–22524. [Google Scholar] [CrossRef] [PubMed]
- GENEActiv by Activinsights. Available online: https://www.geneactiv.org/ (accessed on 24 March 2017).
- Shoaib, M.; Bosch, S.; Incel, O.D.; Scholten, H.; Havinga, P.J. Complex human activity recognition using smartphone and wrist-worn motion sensors. Sensors 2016, 16, 426. [Google Scholar] [CrossRef] [PubMed]
- Moschetti, A.; Fiorini, L.; Esposito, D.; Dario, P.; Cavallo, F. Recognition of daily gestures with wearable inertial rings and bracelets. Sensors 2016, 16, 1341. [Google Scholar] [CrossRef] [PubMed]
- Parate, A.; Chiu, M.C.; Chadowitz, C.; Ganesan, D.; Kalogerakis, E. Risq: Recognizing smoking gestures with inertial sensors on a wristband. In Proceedings of the ACM 12th annual international conference on Mobile Systems, Applications, and Services, Bretton Woods, NH, USA, 16–19 June 2014; pp. 149–161. [Google Scholar]
- Nguyen, M.; Fan, L.; Shahabi, C. Activity recognition using wrist-worn sensors for human performance evaluation. In Proceedings of the 2015 IEEE International Conference on. IEEE Data Mining Workshop (ICDMW), Atlantic City, NJ, USA, 14–17 November 2015; pp. 164–169. [Google Scholar]
- Sarcevic, P.; Kincses, Z.; Pletl, S. Comparison of different classifiers in movement recognition using WSN-based wrist-mounted sensors. In Proceedings of the 2015 IEEE Sensors Applications Symposium (SAS), Zadar, Croatia, 13–15 April 2015; pp. 1–6. [Google Scholar]
- Margarito, J.; Helaoui, R.; Bianchi, A.M.; Sartor, F.; Bonomi, A.G. User-independent recognition of sports activities from a single wrist-worn accelerometer: A template-matching-based approach. IEEE Trans. Biomed. Eng. 2016, 63, 788–796. [Google Scholar] [CrossRef] [PubMed]
- Wei, Z.; Bao, T. Research on a novel strategy for automatic activity recognition using wearable device. In Proceedings of the 2016 8th IEEE International Conference on Communication Software and Networks (ICCSN), Beijing, China, 4–6 June 2016; pp. 488–492. [Google Scholar]
- Cho, Y.; Cho, H.; Kyung, C.M. Design and Implementation of Practical Step Detection Algorithm for Wrist-Worn Devices. IEEE Sens. J. 2016, 16, 7720–7730. [Google Scholar] [CrossRef]
- Ni, Q.; García Hernando, A.B.; de la Cruz, I.P. The elderly’s independent living in smart homes: A characterization of activities and sensing infrastructure survey to facilitate services development. Sensors 2015, 15, 11312–11362. [Google Scholar] [CrossRef] [PubMed]
- Okeyo, G.; Chen, L.; Wang, H. Combining ontological and temporal formalisms for composite activity modelling and recognition in smart homes. Future Gener. Comput. Syst. 2014, 39, 29–43. [Google Scholar] [CrossRef]
- Hardegger, M.; Roggen, D.; Calatroni, A.; Tröster, G. S-SMART: A unified bayesian framework for simultaneous semantic mapping, activity recognition, and tracking. ACM Trans. Intell. Syst. Technol. TIST 2016, 7, 34. [Google Scholar] [CrossRef]
- Ni, Q.; García Hernando, A.B.; Pau de la Cruz, I. A Context-Aware System Infrastructure for Monitoring Activities of Daily Living in Smart Home. J. Sens. 2016, 2016, 9493047. [Google Scholar] [CrossRef]
- Bouten, C.V.; Koekkoek, K.T.; Verduin, M.; Kodde, R.; Janssen, J.D. A triaxial accelerometer and portable data processing unit for the assessment of daily physical activity. IEEE Trans. Biomed. Eng. 1997, 44, 136–147. [Google Scholar] [CrossRef] [PubMed]
- Santoso, F.; Redmond, S.J. Indoor location-aware medical systems for smart homecare and telehealth monitoring: State-Of-The-Art. Physiol. Meas. 2015, 36, R53. [Google Scholar] [CrossRef] [PubMed]
- Sugino, K.; Katayama, S.; Niwa, Y.; Shiramatsu, S.; Ozono, T.; Shintani, T. A Bluetooth-based Device-Free Motion Detector for a Remote Elder Care Support System. In Proceedings of the 2015 IIAI 4th International Congress on Advanced Applied Informatics (IIAI-AAI), Okayama, Japan, 12–16 July 2015; pp. 91–96. [Google Scholar]
- Fujihara, A.; Yanagizawa, T. Proposing an extended iBeacon system for indoor route guidance. In Proceedings of the 2015 IEEE International Conference on Intelligent Networking and Collaborative Systems (INCOS), Taipei, Taiwan, 2–4 September 2015; pp. 31–37. [Google Scholar]
- He, Z.; Cui, B.; Zhou, W.; Yokoi, S. A proposal of interaction system between visitor and collection in museum hall by iBeacon. In Proceedings of the 2015 10th International Conference on Computer Science Education (ICCSE), Cambridge, UK, 22–24 July 2015; pp. 427–430. [Google Scholar]
- Volam, P.K.; Kamath, A.R.; Bagi, S.S. A system and method for transmission of traffic sign board information to vehicles and relevance determination. In Proceedings of the 2014 IEEE International Conference on Advances in Electronics, Computers and Communications (ICAECC), Bangalore, India, 10–11 October 2014; pp. 1–6. [Google Scholar]
- Corna, A.; Fontana, L.; Nacci, A.; Sciuto, D. Occupancy detection via iBeacon on Android devices for smart building management. In Proceedings of the 2015 Design, Automation & Test in Europe Conference & Exhibition, Grenoble, France, 9–13 March 2015; pp. 629–632. [Google Scholar]
- Filippoupolitis, A.; Oliff, W.; Loukas, G. Occupancy Detection for Building Emergency Management Using BLE Beacons. In Proceedings of the Computer and Information Sciences: 31st International Symposium, ISCIS 2016, Kraków, Poland, 27–28 October 2016; Czachórski, T., Gelenbe, E., Grochla, K., Lent, R., Eds.; Springer: Cham, Switzerland, 2016; pp. 233–240. [Google Scholar]
- Filippoupolitis, A.; Oliff, W.; Loukas, G. Bluetooth Low Energy Based Occupancy Detection for Emergency Management. In Proceedings of the 2016 15th International Conference on Ubiquitous Computing and Communications and 2016 International Symposium on Cyberspace and Security (IUCC-CSS), Granada, Spain, 14–16 December 2016; pp. 31–38. [Google Scholar]
- Bulling, A.; Blanke, U.; Schiele, B. A tutorial on human activity recognition using body-worn inertial sensors. ACM Comput. Surv. 2014, 46, 33. [Google Scholar] [CrossRef]
- Banos, O.; Galvez, J.M.; Damas, M.; Pomares, H.; Rojas, I. Window size impact in human activity recognition. Sensors 2014, 14, 6474–6499. [Google Scholar] [CrossRef] [PubMed]
- Faragher, R.; Harle, R. An analysis of the accuracy of bluetooth low energy for indoor positioning applications. In Proceedings of the 27th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; Volume 812, p. 2. [Google Scholar]
- Bao, L.; Intille, S.S. Activity recognition from user-annotated acceleration data. In Pervasive Computing; Springer: Berlin, Heidelberg, 2004; pp. 1–17. [Google Scholar]
- Preece, S.J.; Goulermas, J.Y.; Kenney, L.P.; Howard, D. A comparison of feature extraction methods for the classification of dynamic activities from accelerometer data. IEEE Trans. Biomed. Eng. 2009, 56, 871–879. [Google Scholar] [CrossRef] [PubMed]
- Zhu, C.; Sheng, W. Human daily activity recognition in robot-assisted living using multi-sensor fusion. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA’09), Kobe, Japan, 12–17 May 2009; pp. 2154–2159. [Google Scholar]
- Pansiot, J.; Stoyanov, D.; McIlwraith, D.; Lo, B.P.; Yang, G.Z. Ambient and wearable sensor fusion for activity recognition in healthcare monitoring systems. In Proceedings of the 4th international workshop on wearable and implantable body sensor networks (BSN 2007), Aachen, Germany, 26–28 March 2007; pp. 208–212. [Google Scholar]
- Hsu, C.W.; Chang, C.C.; Lin, C.J. A practical guide to support vector classification. 2003. Available online: http://www.csie.ntu.edu.tw/~cjlin/papers/guide/guide.pdf (accessed on 24 March 2017).
- Sokolova, M.; Lapalme, G. A systematic analysis of performance measures for classification tasks. Inf. Process. Manag. 2009, 45, 427–437. [Google Scholar] [CrossRef]
- Filippoupolitis, A.; Gorbil, G.; Gelenbe, E. Spatial computers for emergency support. Comput. J. 2012, 56, 1399–1416. [Google Scholar] [CrossRef]
- Filippoupolitis, A.; Loukas, G.; Timotheou, S.; Dimakis, N.; Gelenbe, E. Emergency response systems for disaster management in buildings. In Proceedings of the NATO Symposium on C3I for Crisis, Emergency and Consequence Management (NATO), Bucharest, Romania, 11–12 May 2009. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Publication | Indoor Space | IMU Sensors | Classification Approach | COTS | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Home | Lab | Other | Acc | Mag | Gyro | SVM | KNN | LR | ANN | HMM | NB | DT | RF | CRF | Other | ||
| [22] | X | X | X | X | X | X | X | ||||||||||
| [23] | X | X | X | X | X | ||||||||||||
| [25] | X | X | X | X | X | X | X | X | |||||||||
| [15] | X | X | X | X | X | X | X | ||||||||||
| [11] | X | X | X | ||||||||||||||
| [16] | X | X | X | X | X | ||||||||||||
| [28] | X | X | X | ||||||||||||||
| [17] | X | X | X | X | X | X | |||||||||||
| [24] | X | X | X | X | X | X | |||||||||||
| [18] | X | X | X | X | X | X | X | ||||||||||
| [20] | X | X | X | X | X | ||||||||||||
| [26] | X | X | X | X | X | X | X | ||||||||||
| [27] | X | X | X | X | X | X | |||||||||||
| [14] | X | X | X | X | X | X | X | ||||||||||
| [13] | X | X | X | X | X | X | X | ||||||||||
| [19] | X | X | X | X | X | X | X | X | X | ||||||||
| [29] | X | X | X | ||||||||||||||
| Activity Code | Activity Name | Sector Codes |
|---|---|---|
| A1 | Typing | S2, S3, S4 |
| A2 | Servicing | S2, S3, S4 |
| A3 | Scanning | S1 |
| A4 | Relocating | S1 |
| A5 | Patching | S2, S3, S4 |
| A6 | Installing | S1, S2, S3, S4 |
| A7 | Assembling | S2, S3, S4 |
| A8 | Refilling | S1, S2 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Filippoupolitis, A.; Oliff, W.; Takand, B.; Loukas, G. Location-Enhanced Activity Recognition in Indoor Environments Using Off the Shelf Smart Watch Technology and BLE Beacons. Sensors 2017, 17, 1230. https://doi.org/10.3390/s17061230
Filippoupolitis A, Oliff W, Takand B, Loukas G. Location-Enhanced Activity Recognition in Indoor Environments Using Off the Shelf Smart Watch Technology and BLE Beacons. Sensors. 2017; 17(6):1230. https://doi.org/10.3390/s17061230
Chicago/Turabian StyleFilippoupolitis, Avgoustinos, William Oliff, Babak Takand, and George Loukas. 2017. "Location-Enhanced Activity Recognition in Indoor Environments Using Off the Shelf Smart Watch Technology and BLE Beacons" Sensors 17, no. 6: 1230. https://doi.org/10.3390/s17061230
APA StyleFilippoupolitis, A., Oliff, W., Takand, B., & Loukas, G. (2017). Location-Enhanced Activity Recognition in Indoor Environments Using Off the Shelf Smart Watch Technology and BLE Beacons. Sensors, 17(6), 1230. https://doi.org/10.3390/s17061230