
Enhanced Flexibility and Reusability through State Machine-Based Architectures for Multisensor Intelligent Robotics

 , ,
, ,
Abstract
:1. Introduction
- An ever-increasing customization of products and short lifecycle, which require an increase in the flexibility of the production means (one unique system must handle all of the product diversity and operations) [2,3]. Robots fit perfect into this topic due to their versatility; robot programs can adapt to the customizations of the products.
- A large variation in production volumes, which requires an increase in the reconfigurability of production (one system for one product/task within recombinable production lines) [2,4]. Robotic mobile platforms play an important role in this trend; easy to move robots are necessary in some production chains where production volumes change frequently.
- Limited access to skilled operators due to an aging workforce, changes in education and an ever-faster technology development. This requires new solutions to assist operators and provide collaborative work environments [5]. Collaborative robotics are being developed for this topic.
2. Materials and Methods
2.1. State Machine-Based Execution Coordination for Dual-Arm Robots
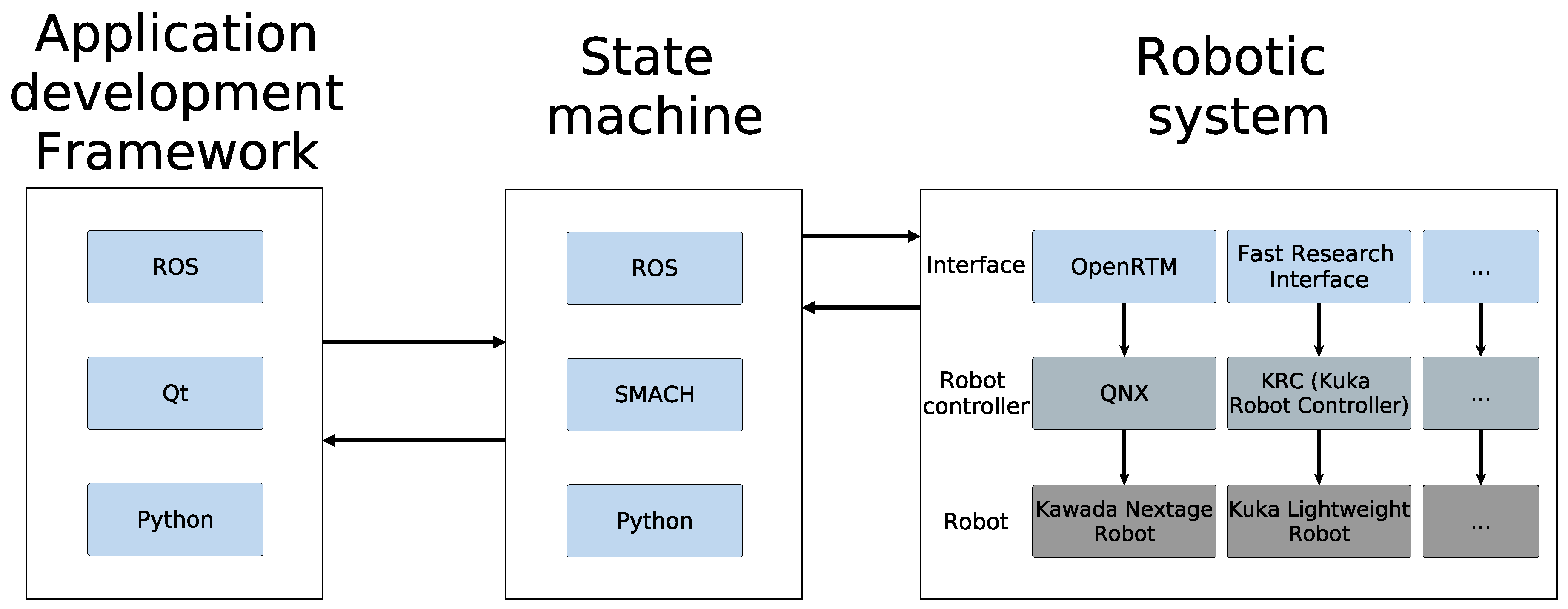
2.1.1. Proposed Architecture
2.1.2. Core Description
2.1.3. Description of the Developed States
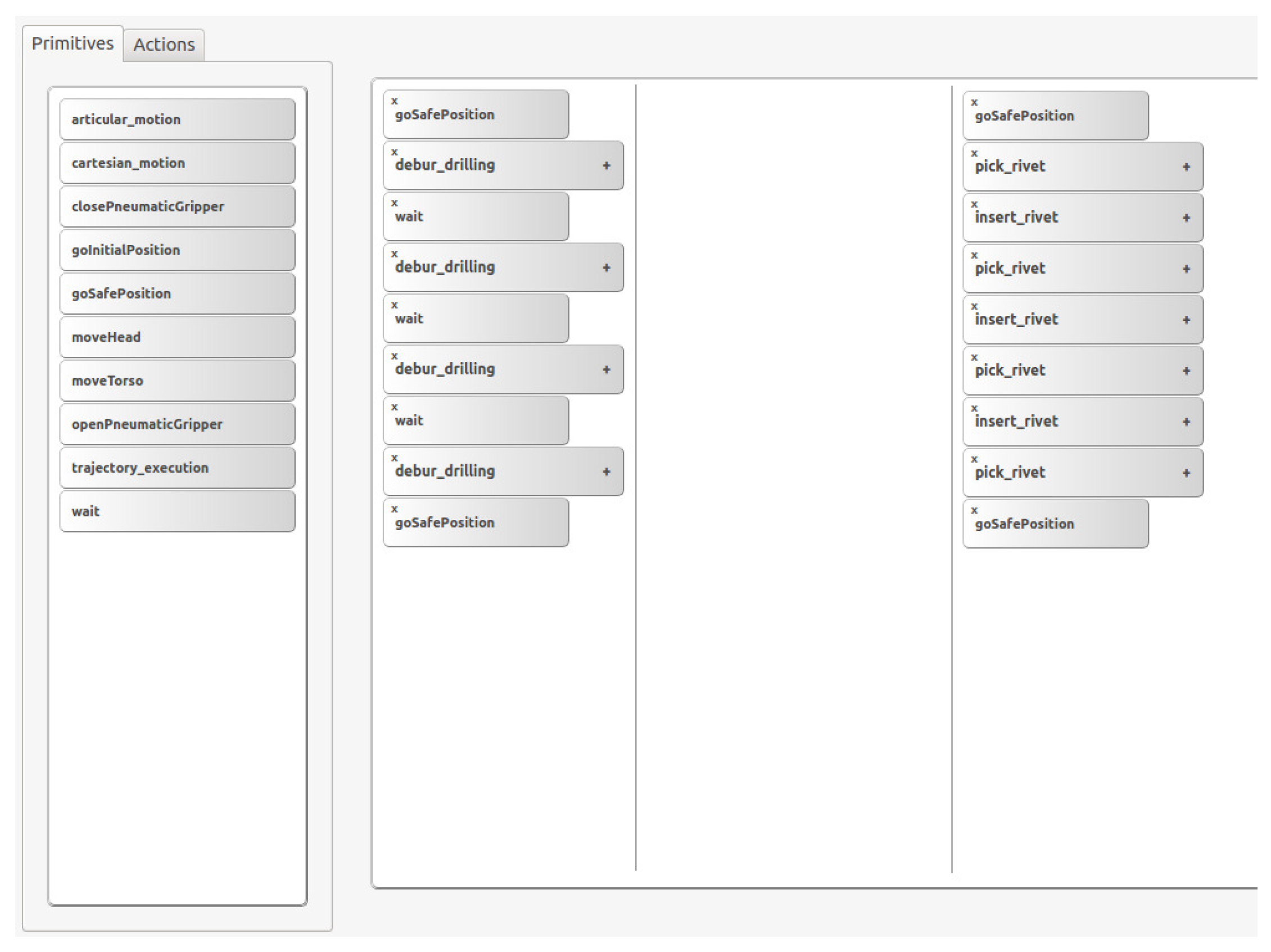
2.2. Flexible Application Development
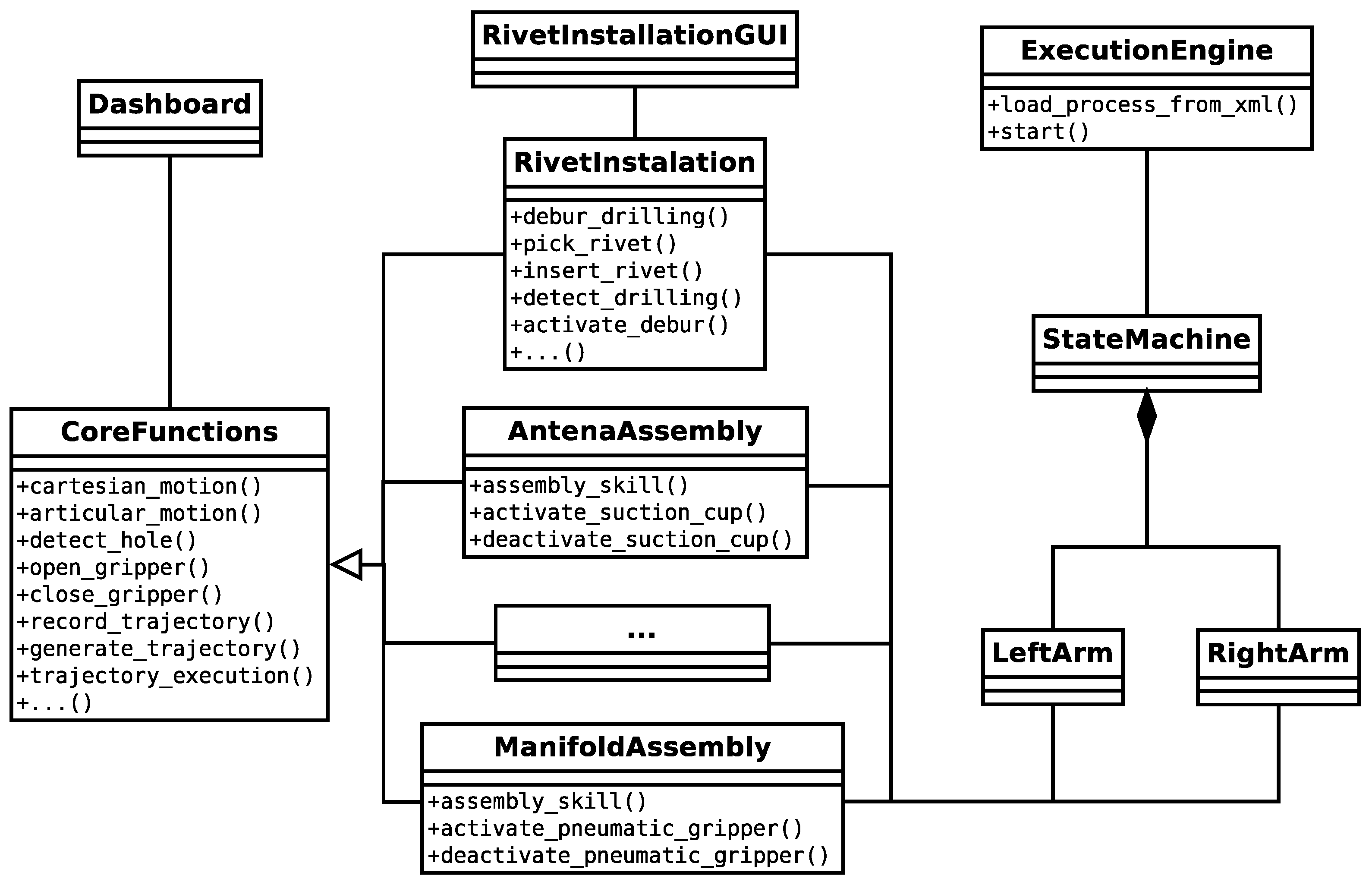
2.2.1. Software Structure of the Framework
2.2.2. Execution Engine
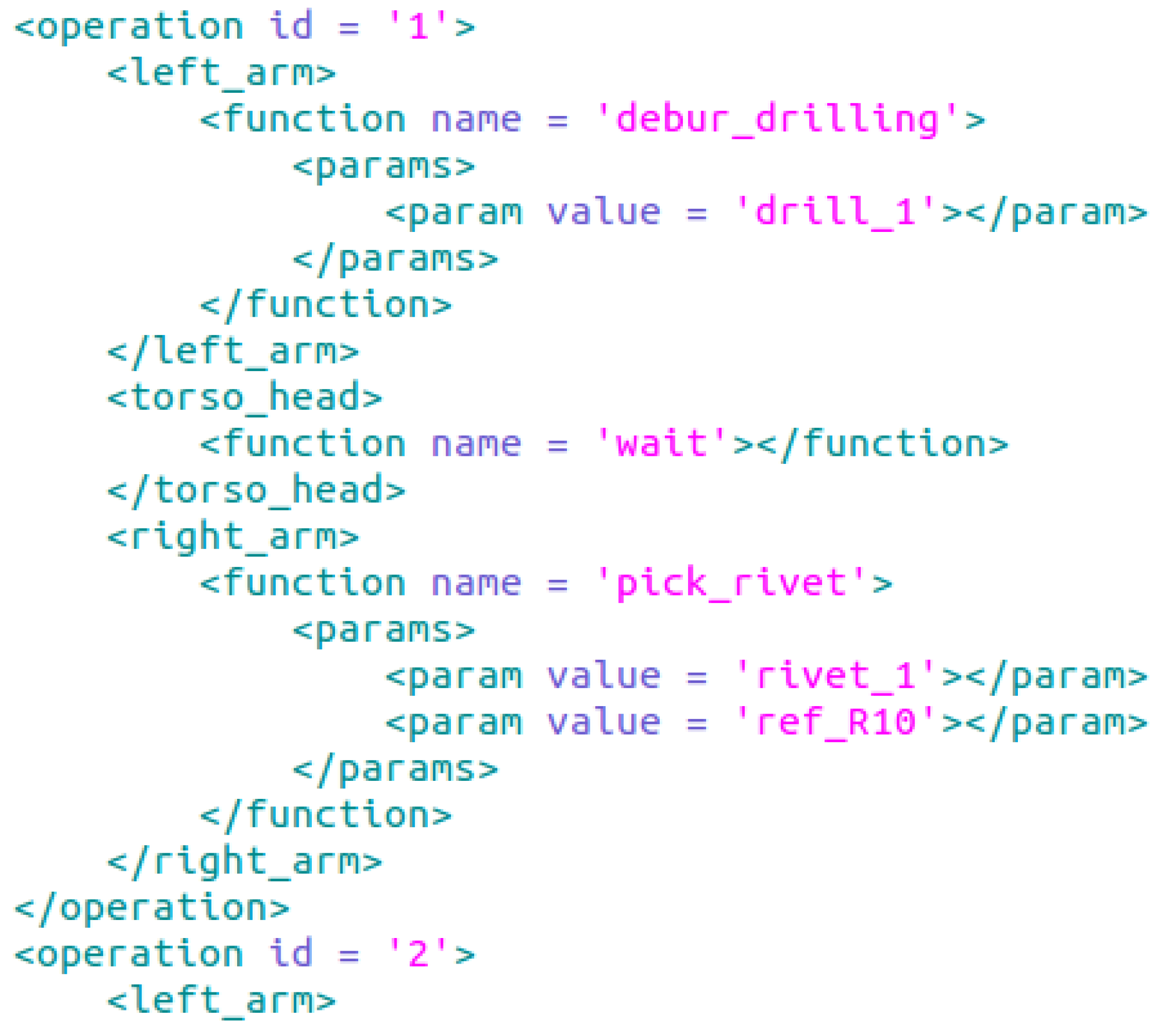
2.2.3. Application to Executable XML
3. Results
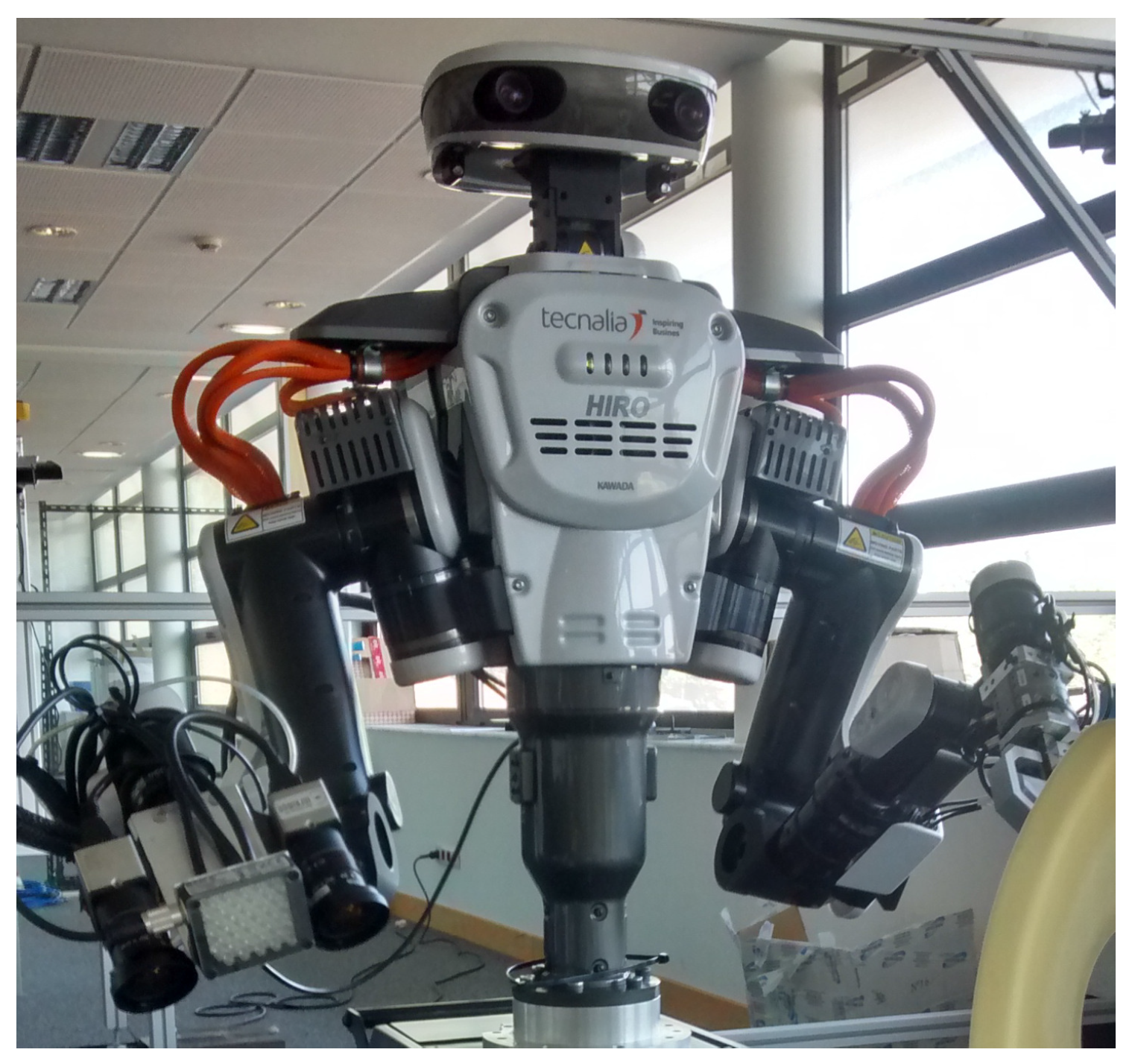
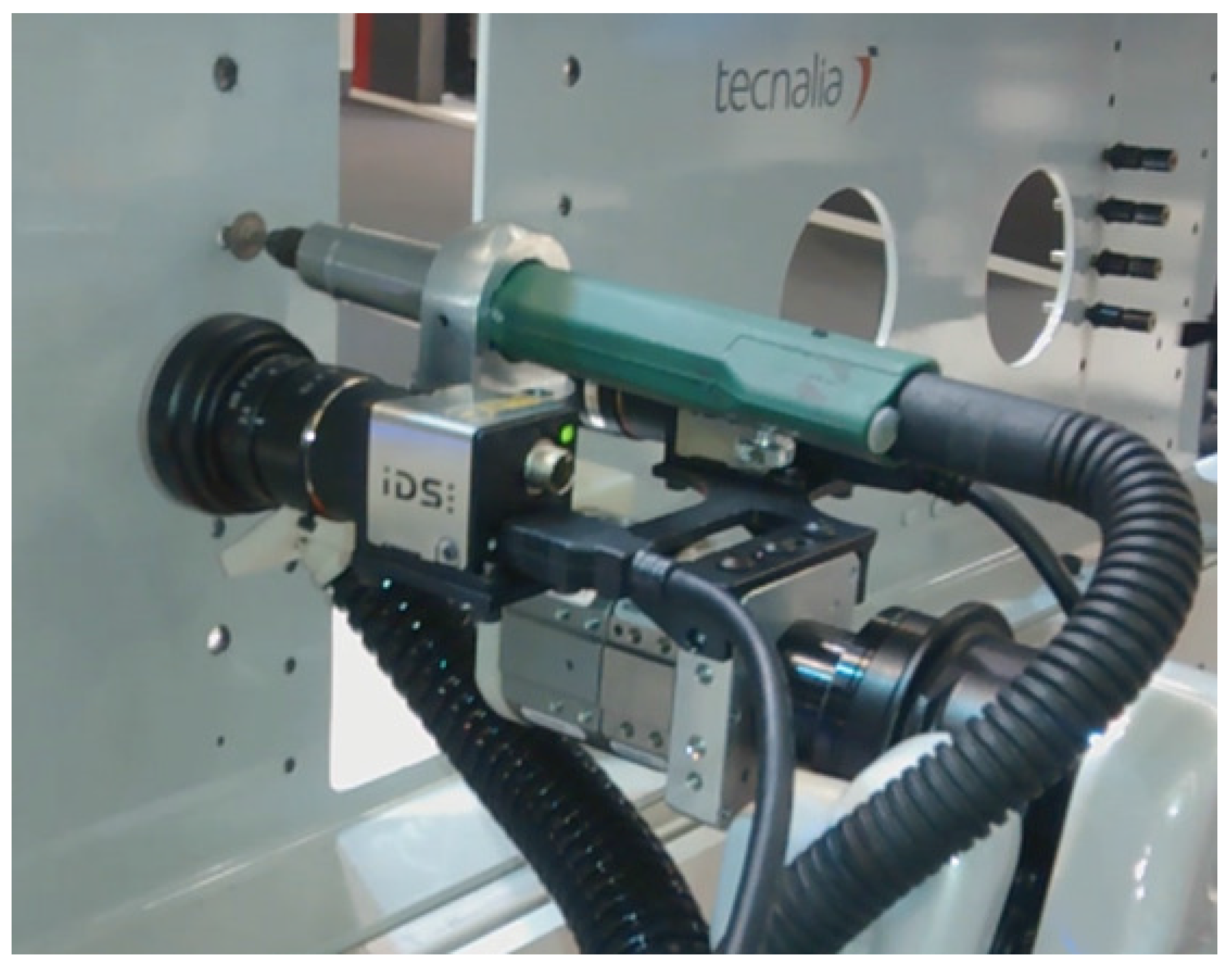
3.1. Validation in a Real Use Case
3.2. Evaluation
4. Discussion
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2005), San Diego, CA, USA, 21–23 September 2005; Volume 1, pp. 886–893. [Google Scholar]
- Duguay, C.R.; Landry, S.; Pasin, F. From mass production to flexible/agile production. Int. J. Oper. Prod. Manag. 1997, 17, 1183–1195. [Google Scholar] [CrossRef]
- Hu, S.J. Evolving paradigms of manufacturing: From mass production to mass customization and personalization. Procedia CIRP 2013, 7, 3–8. [Google Scholar] [CrossRef]
- Wang, W.; Koren, Y. Scalability planning for reconfigurable manufacturing systems. J. Manuf. Syst. 2012, 31, 83–91. [Google Scholar] [CrossRef]
- Tao, F.; Cheng, Y.; Zhang, L.; Nee, A. Advanced manufacturing systems: Socialization characteristics and trends. J. Intell. Manuf. 2015, 28, 1–16. [Google Scholar] [CrossRef]
- Haslarn, C. The end of mass production? Econ. Soc. 1987, 16, 405–439. [Google Scholar]
- Smith, C.; Karayiannidis, Y.; Nalpantidis, L.; Gratal, X.; Qi, P.; Dimarogonas, D.V.; Kragic, D. Dual arm manipulation—A survey. Robot. Auton. Syst. 2012, 60, 1340–1353. [Google Scholar] [CrossRef]
- Xia, L.; Chen, C.C.; Aggarwal, J.K. Human detection using depth information by kinect. In Proceedings of the 2011 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Colorado Springs, CO, USA, 20–25 June 2011; pp. 15–22. [Google Scholar]
- Blumrosen, G.; Miron, Y.; Intrator, N.; Plotnik, M. A Real-time kinect signature-based patient home monitoring system. Sensors 2016, 16, 1965. [Google Scholar] [CrossRef] [PubMed]
- Sen, S.; Sherrick, G.; Ruiken, D.; Grupen, R.A. Hierarchical Skills and Skill-based Representation. In Proceedings of the Twenty-Fifth Conference on Artificial Intelligence (AAAI-11), San Francisco, CA, USA, 7–8 August 2011. [Google Scholar]
- Thomas, U.; Hirzinger, G.; Rumpe, B.; Schulze, C.; Wortmann, A. A new skill based robot programming language using UML/P Statecharts. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Zhou, J.; Ding, X.; Qing, Y.Y. Automatic planning and coordinated control for redundant dual-arm space robot system. Ind. Robot Int. J. 2011, 38, 27–37. [Google Scholar] [CrossRef]
- Andersen, R.H.; Solund, T.; Hallam, J. Definition and Initial Case-Based Evaluation of Hardware-Independent Robot Skills for Industrial Robotic Co-Workers. In Proceedings of the 41st International Symposium on Robotics (ISR/Robotik 2014), Munich, Germany, 2–3 June 2014. [Google Scholar]
- Vanthienen, D.; De Laet, T.; Decré, W.; Smits, R.; Klotzbücher, M.; Buys, K.; Bellens, S.; Gherardi, L.; Bruyninckx, H.; De Schutter, J. iTaSC as a unified framework for task specification, control, and coordination, demonstrated on the PR2. Proceedings of 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Poppa, F.; Zimmer, U. RobotUI-A software architecture for modular robotics user interface frameworks. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura-Algarve, Portugal, 7–11 October 2012. [Google Scholar]
- Björkelund, A.; Bruyninckx, H.; Malec, J.; Nilsson, K.; Nugues, P. Knowledge for intelligent industrial robots. In Proceedings of the AAAI Spring Symposium: Designing Intelligent Robots, Stanford, CA, USA, 26–28 March 2012. [Google Scholar]
- Huckaby, J.; Vassos, S.; Christensen, H.I. Planning with a task modeling framework in manufacturing robotics. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013. [Google Scholar]
- Stenmark, M.; Malec, J. A helping hand: Industrial robotics, knowledge and user-oriented services. In Proceedings of the 2013 IEEE/RSJ International Conferenceon Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013. [Google Scholar]
- Alonso, D.; Vicente-Chicote, C.; Pastor, J.A.; Alvarez, B. Stateml: From graphical state machine models to thread-safe ada code. In Reliable Software Technologies—Ada-Europe 2008; Springer: Berlin, Germany, 2008; pp. 158–170. [Google Scholar]
- Armentia, A.; Gangoiti, U.; Priego, R.; Estévez, E.; Marcos, M. Flexibility support for homecare applications based on models and multi-agent technology. Sensors 2015, 15, 31939–31964. [Google Scholar] [CrossRef] [PubMed]
- Klotzbuecher, M. rFSM. Available online: https://github.com/orocos/rFSM/tree/master/doc (accessed on 1 June 2016).
- Bohren, J. Package Summary. Available online: http://wiki.ros.org/smach. (accessed on 1 June 2016).
- Quigley, M.; Conley, K.; Gerkey, B.P.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. Available online: http://www.willowgarage.com/sites/default/files/icraoss09-ROS.pdf (accessed on 24 May 2017).
- ROS. Available online: http://www.ros.org/ (accessed on 1 June 2016).
- ROS. Core Components. Available online: http://www.ros.org/core-components/ (accessed on 1 June 2016).
- ROS. Robots. Available online: http://wiki.ros.org/Robots (accessed on 1 January 2017).
- Badawy, R.; Yassine, A.; Heßler, A.; Hirsch, B.; Albayrak, S. A novel multi-agent system utilizing quantum-inspired evolution for demand side management in the future smart grid. Integr. Comput.-Aided Eng. 2013, 20, 127–141. [Google Scholar]
- Pinto, T.; Praca, I.; Vale, Z.; Morais, H.; Sousa, T.M. Strategic bidding in electricity markets: An agent-based simulator with game theory for scenario analysis. Integr. Comput.-Aided Eng. 2013, 20, 335–346. [Google Scholar]
- OpenRTM. Available online: http://openrtm.org/ (accessed on 1 June 2016).
- Fast Research Interface Library. Available online: http://cs.stanford.edu/people/tkr/fri/html/ (accessed on 1 June 2016).
- Tecnalia. Available online: http://www.tecnalia.com/en/ (accessed on 1 February 2017).
- LIAA. Available online: http://www.project-leanautomation.eu/ (accessed on 1 June 2016).
- ReCaM. Available online: http://recam-project.eu/ (accessed on 1 February 2017).
- DGH. Available online: http://www.grupodgh.es/en/ (accessed on 1 February 2017).
- DGH. Available online: http://www.cesa.aero/en/ (accessed on 1 February 2017).
- Herrero, H.; Outón, J.L.; Esnaola, U.; Sallé, D.; de Ipiña, K.L. State machine based architecture to increase flexibility of dual-arm robot programming. In Bioinspired Computation in Artificial Systems; Springer: Berlin, Germany, 2015; pp. 98–106. [Google Scholar]
- Herrero, H.; Esnaola, U.; Sallé, D. TECNALIA HIRO Performing Aeronautics Assembly–Deburring and riveting–Showcased at BIEMH2014. Available online: https://www.youtube.com/watch?v=pvxlqyJtPNo (accessed on 1 April 2017).
- Järvenpää, E.; Siltala, N.; Lanz, M. Formal resource and capability descriptions supporting rapid reconfiguration of assembly systems. In Proceedings of the 12th Conference on Automation Science and Engineering, and International Symposium on Assembly and Manufacturing, Fort Worth, TX, USA, 21–22 August 2016. [Google Scholar]
- Järvenpää, E.; Siltala, N.; Hylli, O.; Lanz, M. Capability matchmaking procedure to support rapid configuration and re-configuration of production systems. 2017; Unpublished. [Google Scholar]
- Babar, M.A.; Zhu, L.; Jeffery, R. A framework for classifying and comparing software architecture evaluation methods. In Proceedings of the Software Engineering Conference, Melbourne, Australia, 13–16 June 2004. [Google Scholar]
- Dobrica, L.; Niemela, E. A survey on software architecture analysis methods. IEEE Trans. Softw. Eng. 2002, 28, 638–653. [Google Scholar] [CrossRef]
- Ionita, M.T.; Hammer, D.K.; Obbink, H. Scenario-based software architecture evaluation methods: An overview. In Proceedings of the International Conference on Software Engineering (ICSE/SARA), Orlando, FL, USA, 19–25 May 2002. [Google Scholar]
- Kazman, R.; Klein, M.; Clements, P. ATAM: Method for Architecture Evaluation; Technical Report, DTIC Document; Software Engineering Institute: Pittsburgh, PA, USA, 2000. [Google Scholar]
- Gonzalez-Huerta, J.; Insfran, E.; Abrahão, S. Models in software architecture derivation and evaluation: Challenges and opportunities. In Proceedings of the International Conference on Model-Driven Engineering and Software Development, Lisbon, Portugal, 7–9 January 2014. [Google Scholar]
- Babar, M.A.; Gorton, I. Comparison of scenario-based software architecture evaluation methods. In Proceedings of the 11th Asia-Pacific Software Engineering Conference, Busan, South Korea, 30 November–3 December 2004. [Google Scholar]
- Cheung, L.; Roshandel, R.; Medvidovic, N.; Golubchik, L. Early prediction of software component reliability. In Proceedings of the 30th International Conference on Software Engineering, Leipzig, Germany, 10–18 May 2008. [Google Scholar]
- Gonzalez-Huerta, J.; Insfran, E.; Abrahão, S.; Scanniello, G. Validating a model-driven software architecture evaluation and improvement method: A family of experiments. Inf. Softw. Technol. 2015, 57, 405–429. [Google Scholar] [CrossRef]
- Kazman, R.; Klein, M.; Clements, P. Evaluating Software Architectures-Methods and Case Studies; Addison-Wesley Professional: Boston, MA, USA, 2001. [Google Scholar]
- Ringert, J.O.; Rumpe, B.; Wortmann, A. A Case Study on Model-Based Development of Robotic Systems using MontiArc with Embedded Automata. arXiv, 2014; arXiv:1408.5692. [Google Scholar]
- Giorgini, P.; Kolp, M.; Mylopoulos, J. Multi-agent and software architectures: A comparative case study. In Proceedings of the International Workshop on Agent-Oriented Software Engineering, Bologna, Italy, 15 July 2002. [Google Scholar]
- Bravo, J.; Villarreal, V.; Hervás, R.; Urzaiz, G. Using a communication model to collect measurement data through mobile devices. Sensors 2012, 12, 9253–9272. [Google Scholar] [CrossRef] [PubMed]
- Aman, W.; Snekkenes, E. EDAS: An evaluation prototype for autonomic event-driven adaptive security in the internet of things. Future Internet 2015, 7, 225–256. [Google Scholar] [CrossRef]
- Biggs, G.; MacDonald, B. A survey of robot programming systems. In Proceedings of the Australasian Conference on Robotics And Automation, Brisbane, Australia, 1–3 December 2003. [Google Scholar]
- Pan, Z.; Polden, J.; Larkin, N.; Van Duin, S.; Norrish, J. Recent progress on programming methods for industrial robots. Robot. Comput.-Integr. Manuf. 2012, 28, 87–94. [Google Scholar] [CrossRef]
- Herrero, H.; Outon, J.L.; Esnaola, U.; Salle, D.; Lopez de Ipina, K. Development and evaluation of a Skill Based Architecture for applied industrial robotics. In Proceedings of the 2015 4th International Work Conference on Bioinspired Intelligence (IWOBI), San Sebastian, Spain, 10–12 June 2015. [Google Scholar]
- Herrero, H.; García, F.; Esnaola, U.; Sallé, D. 2015 TECNALIA NextageOpen—Dual-Arm Robot for Aeronautics Pilot Station. Available online: https://www.youtube.com/watch?v=x-eJ66jM1Rk (accessed on 1 April 2017).
- Herrero, H.; Moughlbay, A.A.; Outón, J.L.; Sallé, D.; de Ipiña, K.L. Skill based robot programming: Assembly, vision and Workspace Monitoring skill interaction. Neurocomputing 2017. [Google Scholar] [CrossRef]
- Herrero, H.; Pacheco, R.; Alberdi, N.; Rumayor, M.; Salle, D.; Lopez de Ipiña, K. Skills for vision-based applications in robotics application to aeronautics assembly pilot station. In Proceedings of the 2015-International Conference on Computer as a Tool (EUROCON), Salamanca, Spain, 8–11 September 2015. [Google Scholar]
- Wang, T.; Gao, H.; Qiu, J. A Combined Fault-Tolerant and Predictive Control for Network-Based Industrial Processes. IEEE Trans. Ind. Electron. 2016, 63, 2529–2536. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, Y.; Qiu, J.; Gao, H. Adaptive fuzzy backstepping control for a class of nonlinear systems with sampled and delayed measurements. IEEE Trans. Fuzzy Syst. 2015, 23, 302–312. [Google Scholar] [CrossRef]
- Wang, T.; Qiu, J.; Gao, H.; Wang, C. Network-Based Fuzzy Control for Nonlinear Industrial Processes With Predictive Compensation Strategy. IEEE Trans. Syst. Man Cybern. Syst. 2016. [Google Scholar] [CrossRef]
- TOPREF. Available online: http://toprefproject.eu/ (accessed on 1 April 2017).
- ROS. Available online: http://rosindustrial.org/about/description/ (accessed on 1 January 2017).
- ROS. Supported Hardware. Available online: http://wiki.ros.org/Industrial/supported_hardware (accessed on 1 January 2017).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | Description |
|---|---|
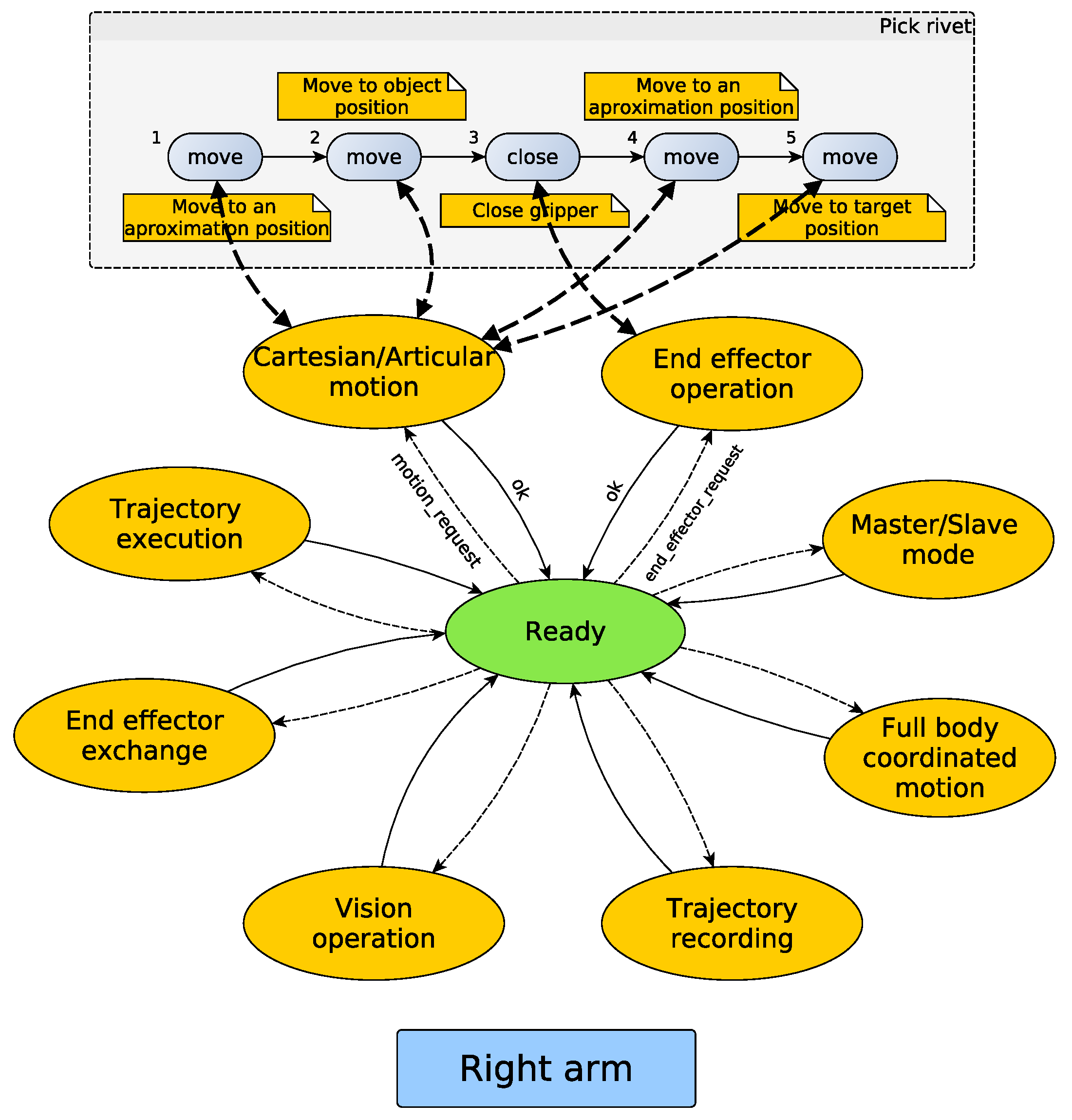
| Ready | The state machine is ready for receiving new instructions. This state is waiting until the execution engine sends a new request. |
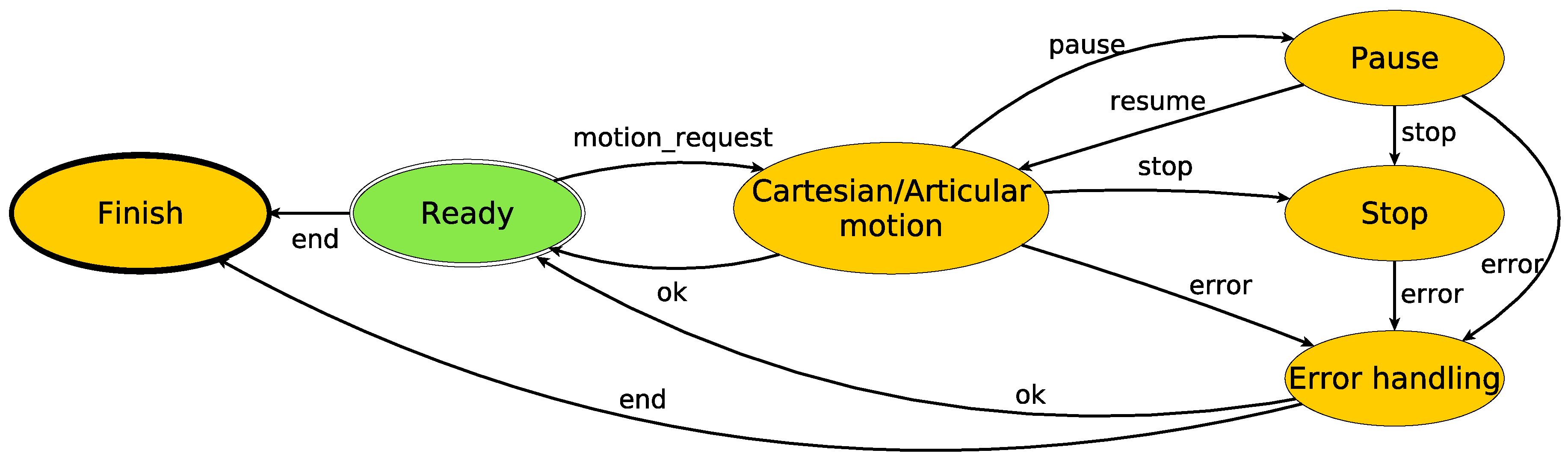
| Cartesian articular motion | Manages the robot movements both in the Cartesian space and the articular space. If the movement cannot be executed correctly, there is an error handling state to manage it. |
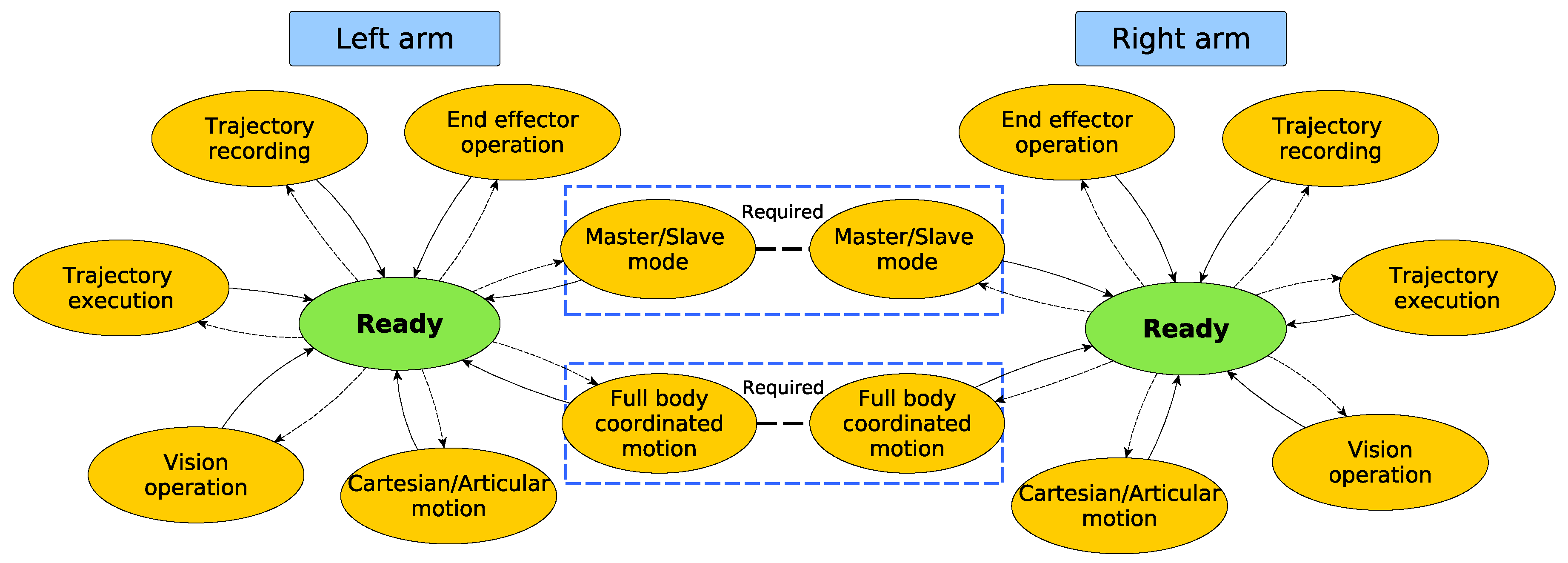
| Full body coordinated motion | Allows controlling both arms in coordination. Two arms must be in this state to start coordinated motion. Sending the values of the 15 joints of the robot is necessary. |
| Record trajectory | Allows recording trajectories with a trajectory planner or teaching by demonstration. These trajectories are stored in a database for future use. |
| Trajectory execution | Executes trajectories, provided by a trajectory planner or previously stored in a database. |
| End-effector operation | Manages end-effector operations; depending on the end effector, different operations can be made, e.g., gripper open/close, deburring tool activate/deactivate, screwing operation, etc. |
| Vision operation | Manages different computer vision operations. This includes picture acquisition, processing and reference frame transformation, among others. As the robotic system has multiple vision systems, this state is responsible for managing them depending on the operation that will be executed. |
| Master/slave mode | Puts robot in bi-manual coordinated manipulation mode; one arm actuates as the master and the other one as the slave. Consists of planning a trajectory for the master arm and then computing this trajectory with an offset for the slave arm. |
| State | Signal | Transition to |
|---|---|---|
| Ready | motion_request | Cartesian/articular motion |
| vision_request | Vision operation | |
| end_effector_request | End effector operation | |
| ... | ... | |
| end | Finish | |
| Cartesian | ok | Ready |
| Articular | pause | Pause |
| motion | stop | Stop |
| error | Error handling | |
| Pause | resume | Cartesian/articular motion |
| stop | Stop | |
| error | Error handling | |
| Stop | error | Error handling |
| Error | ok | Ready |
| handling | end | Finish |
| Quality | Online Programming | Offline Programming | State Machine and Skill Based Programming Framework |
|---|---|---|---|
| Ease of use | − | + | ++ |
| Adaptability | − | + | ++ |
| Reliability | − | +− | + |
| Subsetability | − | + | ++ |
| Performance | ++ | ++ | − |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Herrero, H.; Outón, J.L.; Puerto, M.; Sallé, D.; López de Ipiña, K. Enhanced Flexibility and Reusability through State Machine-Based Architectures for Multisensor Intelligent Robotics. Sensors 2017, 17, 1249. https://doi.org/10.3390/s17061249
Herrero H, Outón JL, Puerto M, Sallé D, López de Ipiña K. Enhanced Flexibility and Reusability through State Machine-Based Architectures for Multisensor Intelligent Robotics. Sensors. 2017; 17(6):1249. https://doi.org/10.3390/s17061249
Chicago/Turabian StyleHerrero, Héctor, Jose Luis Outón, Mildred Puerto, Damien Sallé, and Karmele López de Ipiña. 2017. "Enhanced Flexibility and Reusability through State Machine-Based Architectures for Multisensor Intelligent Robotics" Sensors 17, no. 6: 1249. https://doi.org/10.3390/s17061249
APA StyleHerrero, H., Outón, J. L., Puerto, M., Sallé, D., & López de Ipiña, K. (2017). Enhanced Flexibility and Reusability through State Machine-Based Architectures for Multisensor Intelligent Robotics. Sensors, 17(6), 1249. https://doi.org/10.3390/s17061249