Image Processing of Porous Silicon Microarray in Refractive Index Change Detection



Abstract
:1. Introduction
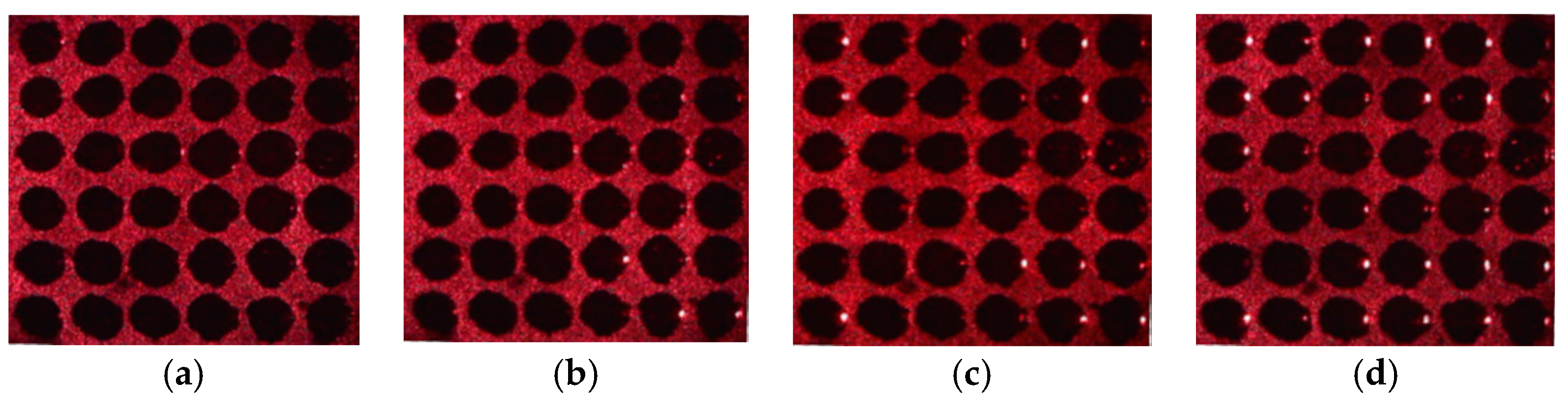
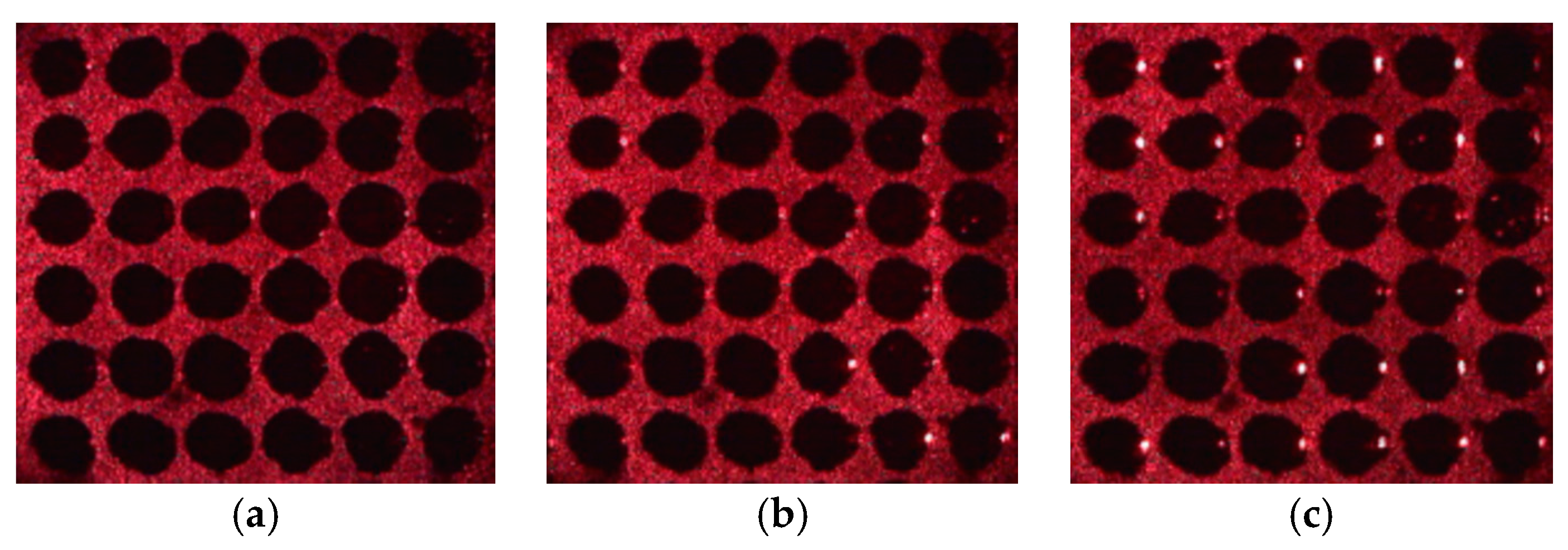
2. Acquisition of Porous Silicon Array Reflected Light Image
3. Extracting the Dots in Reflected Light Image
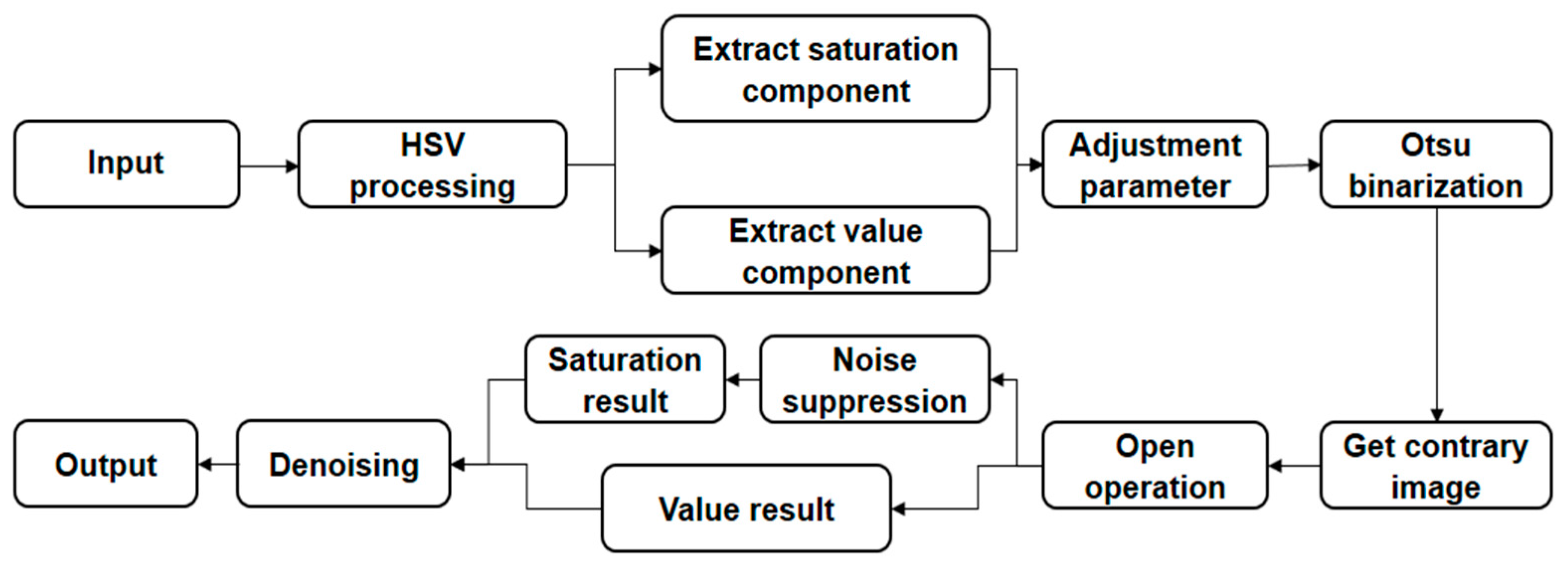
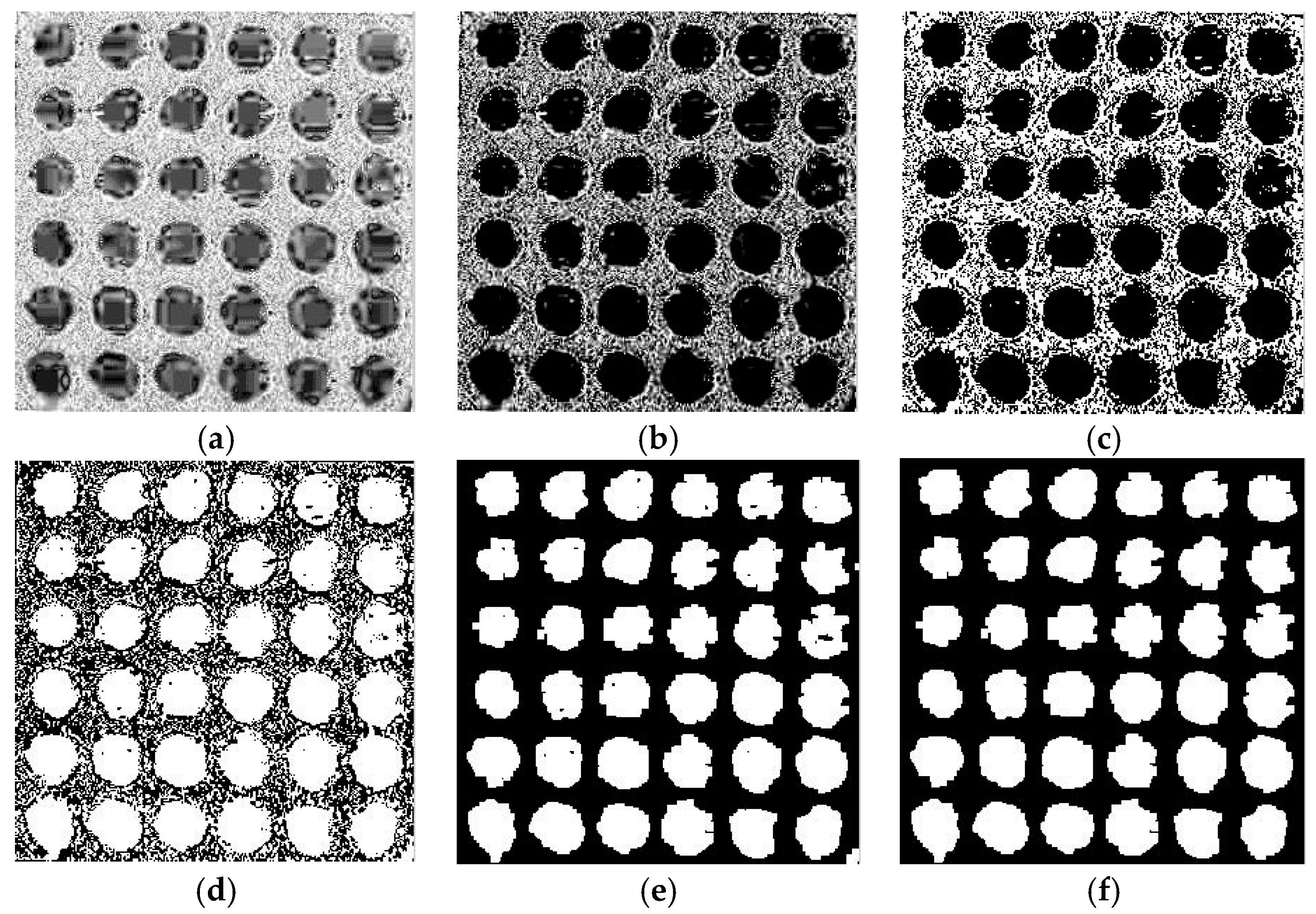
3.1. Pretreatment
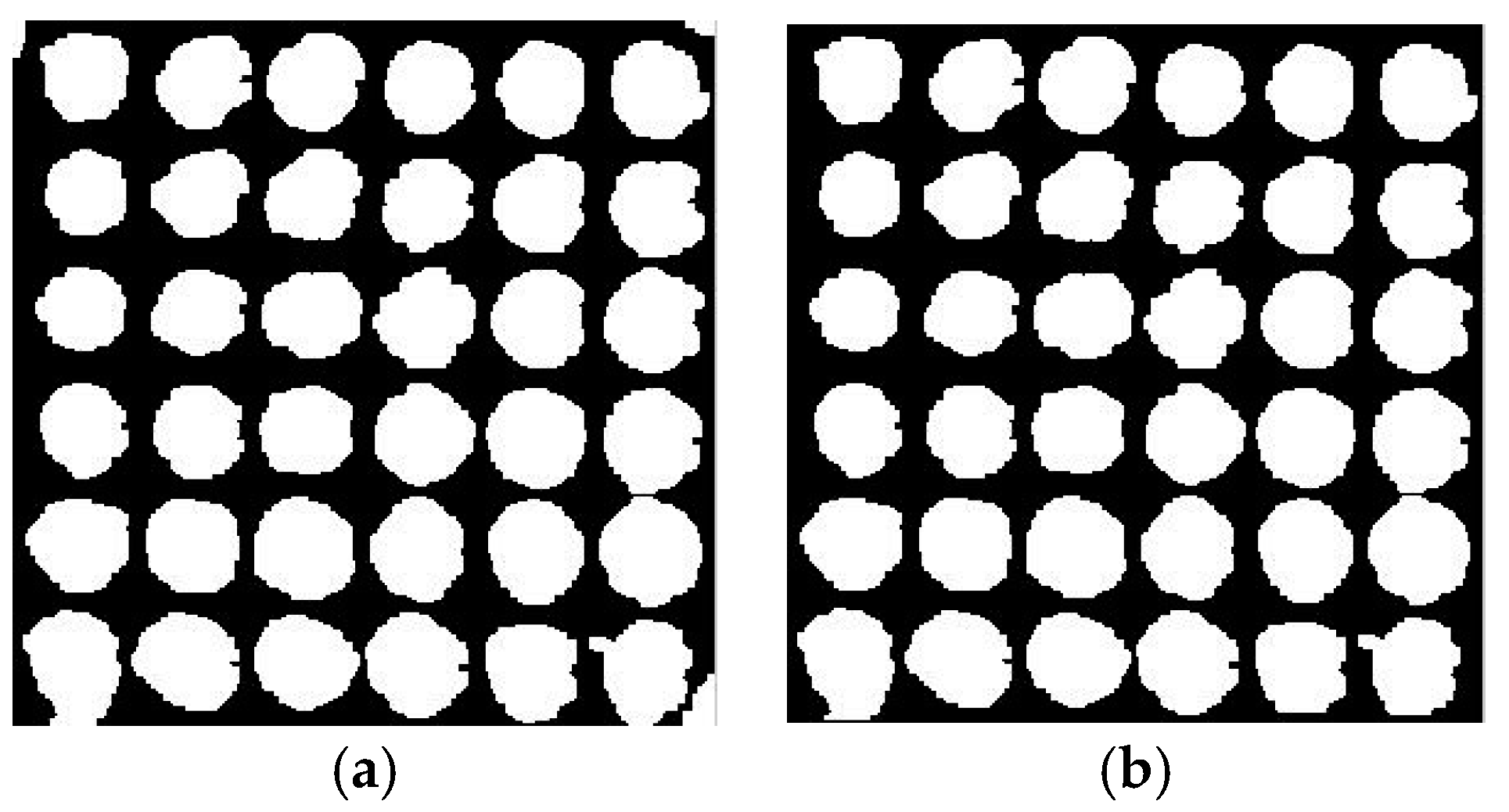
3.2. Tilt Correction
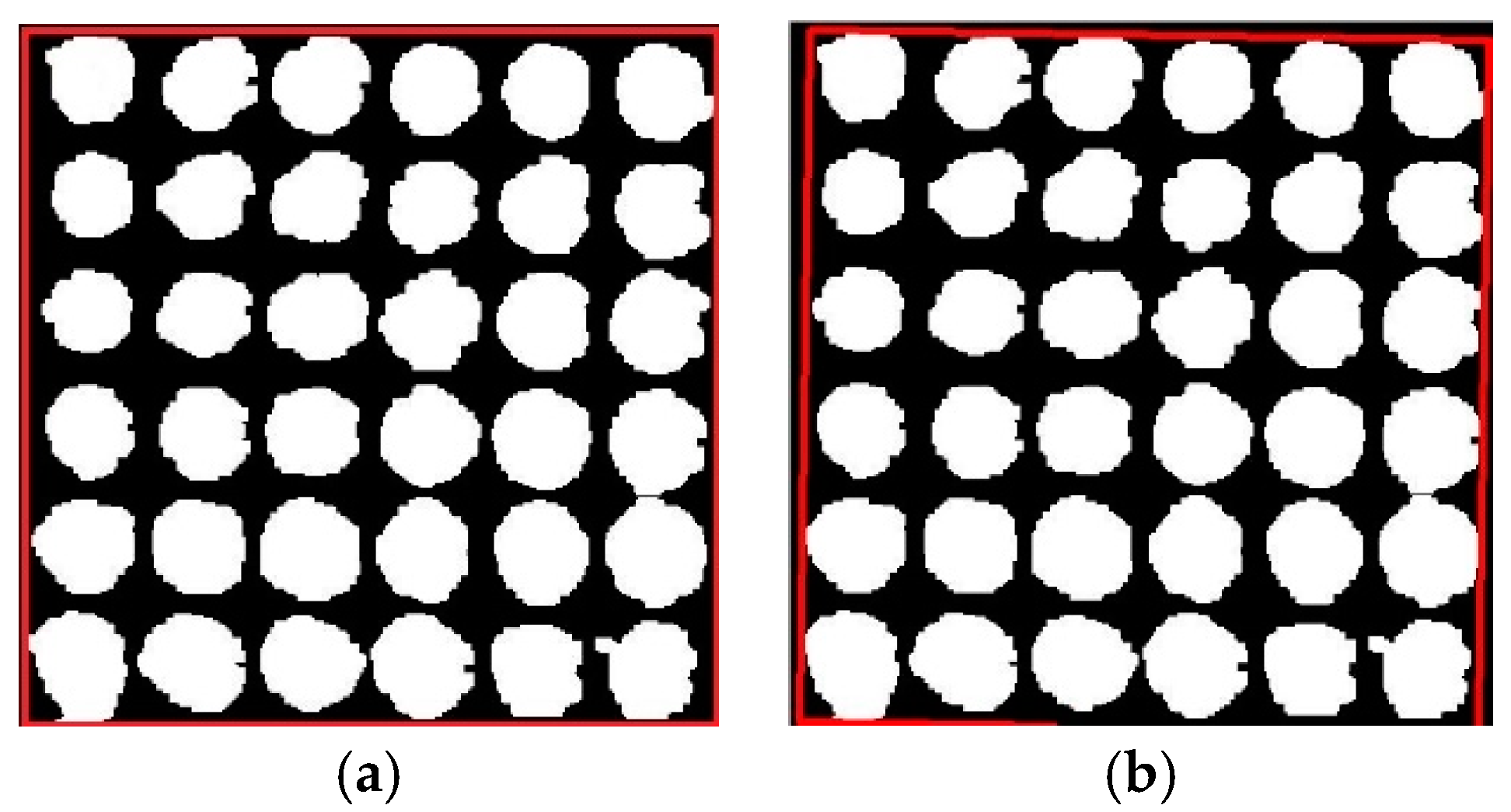
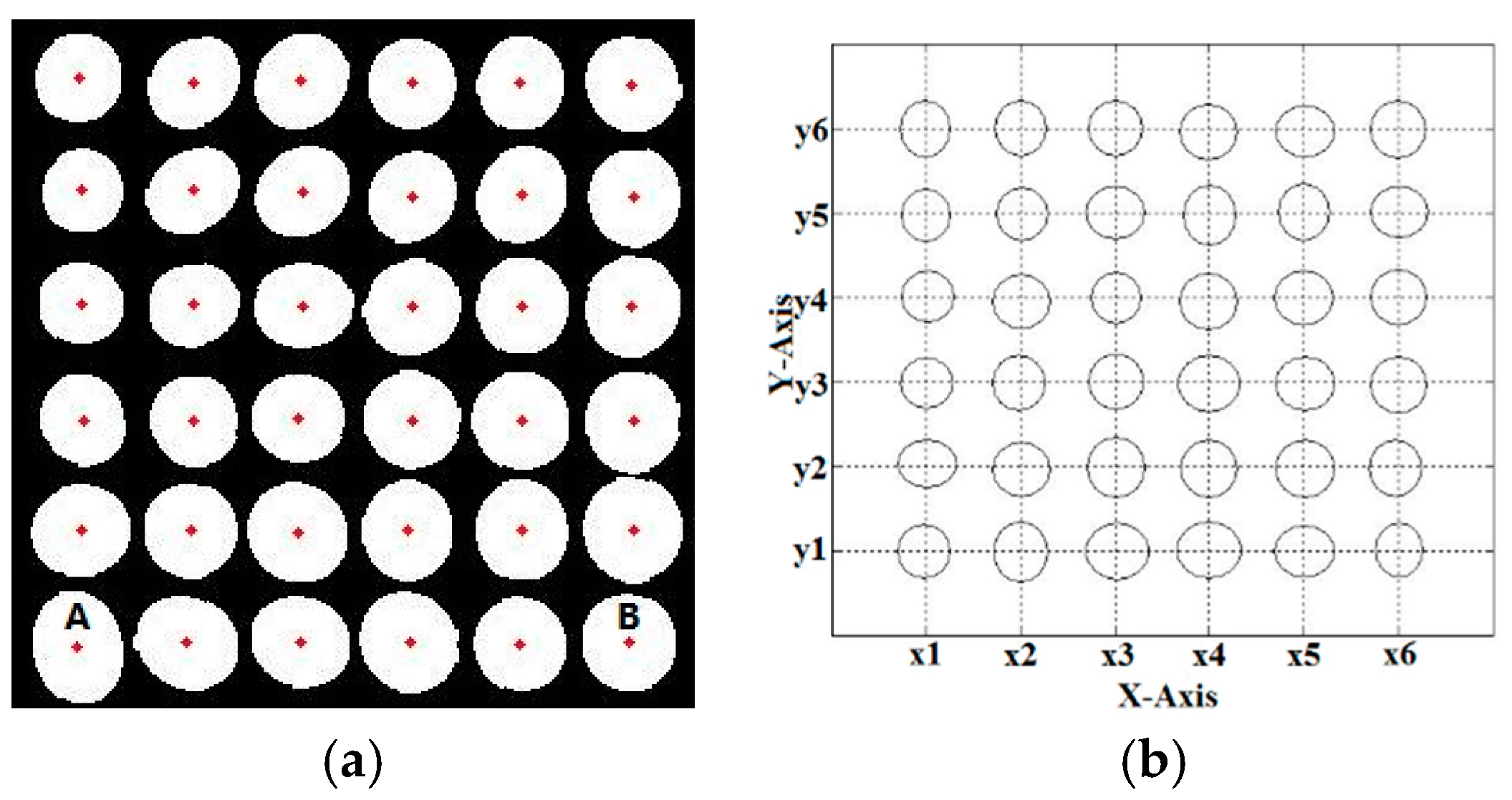
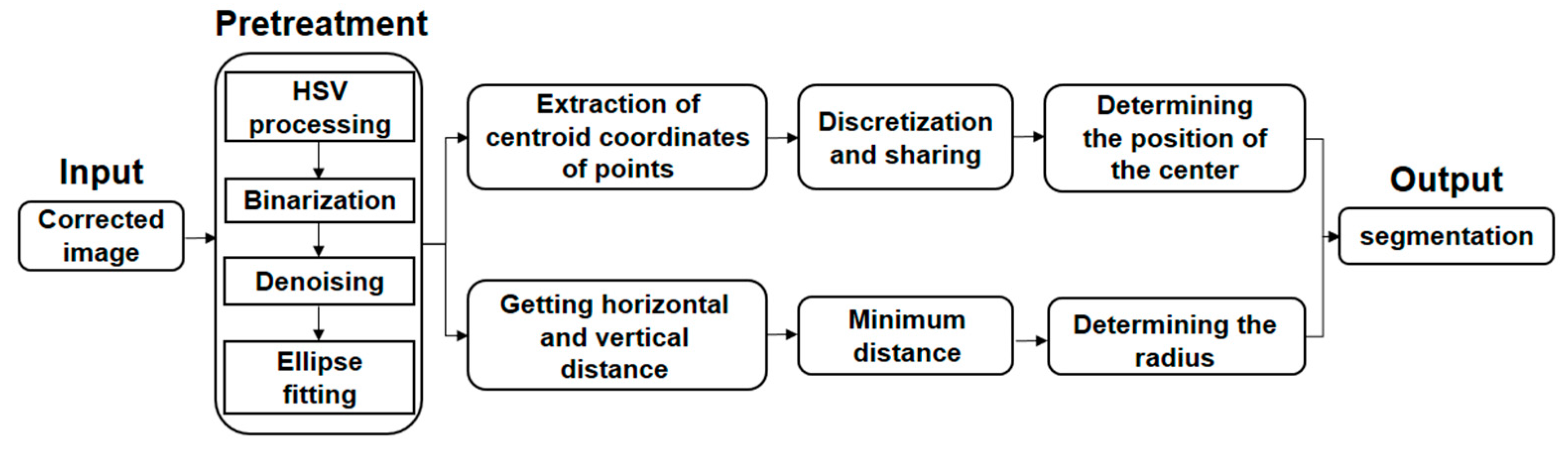
3.3. Spot Segmentation
4. Experimental Results and Analysis
4.1. Pretreatment
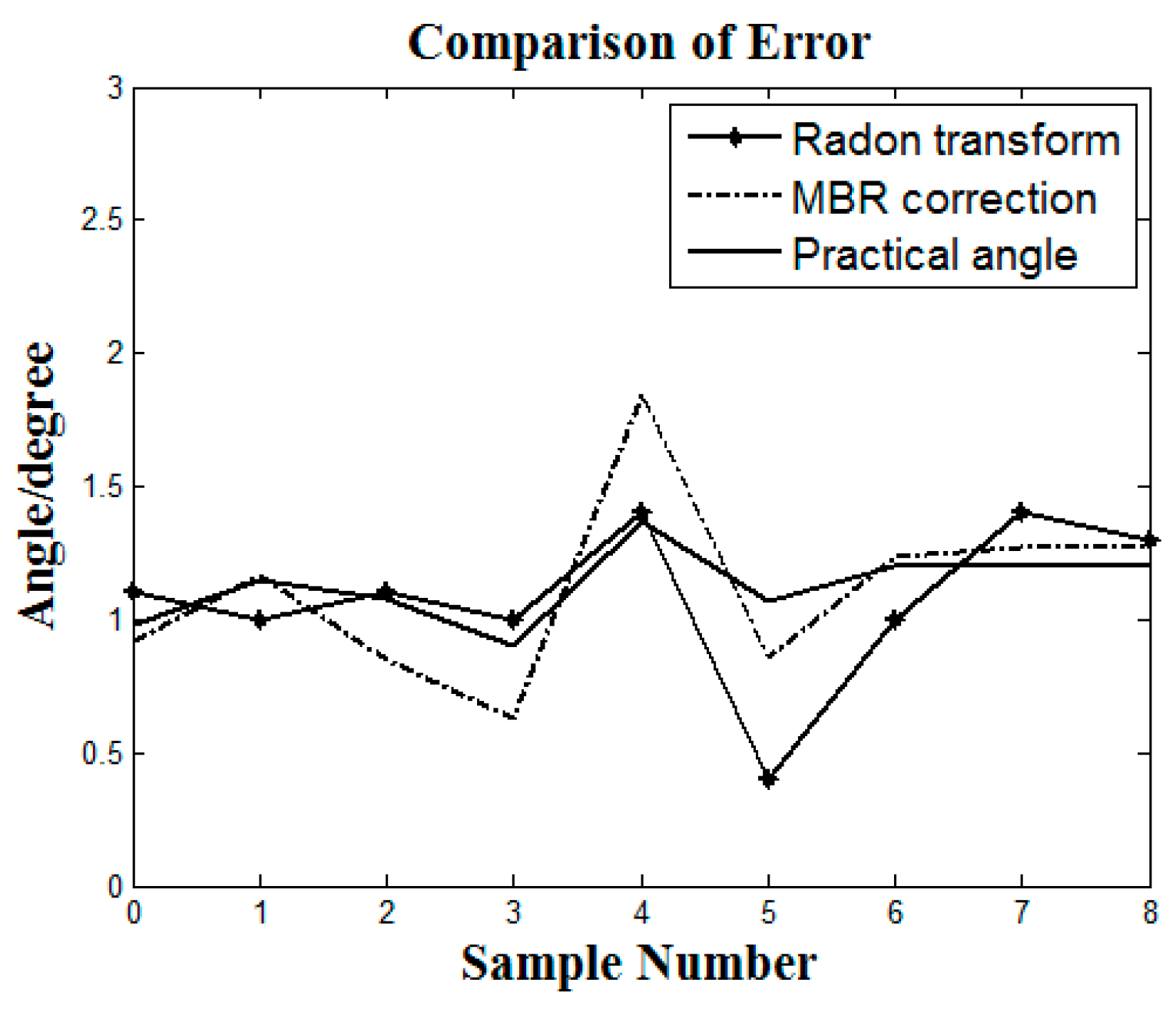
4.2. Tilt Correction
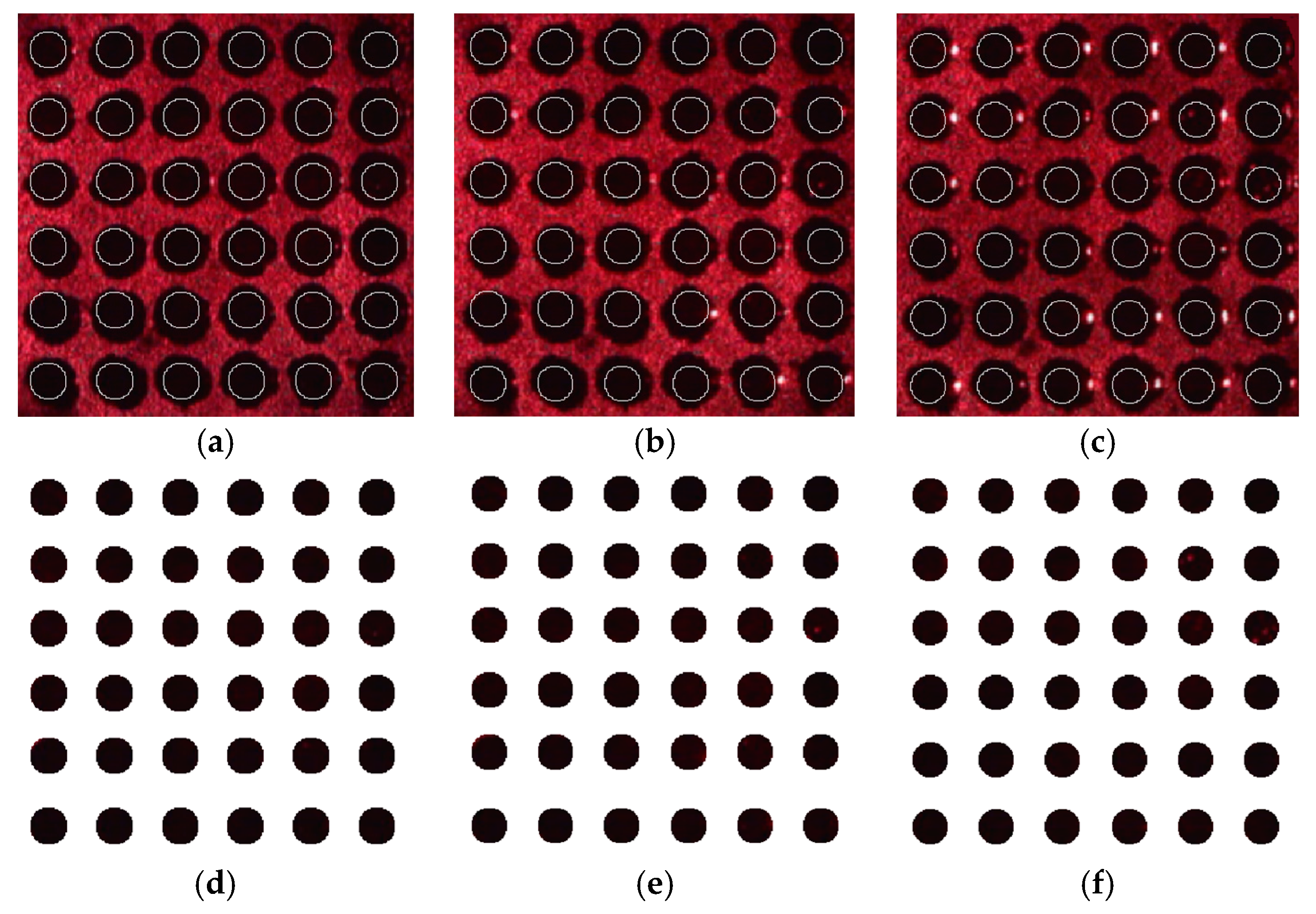
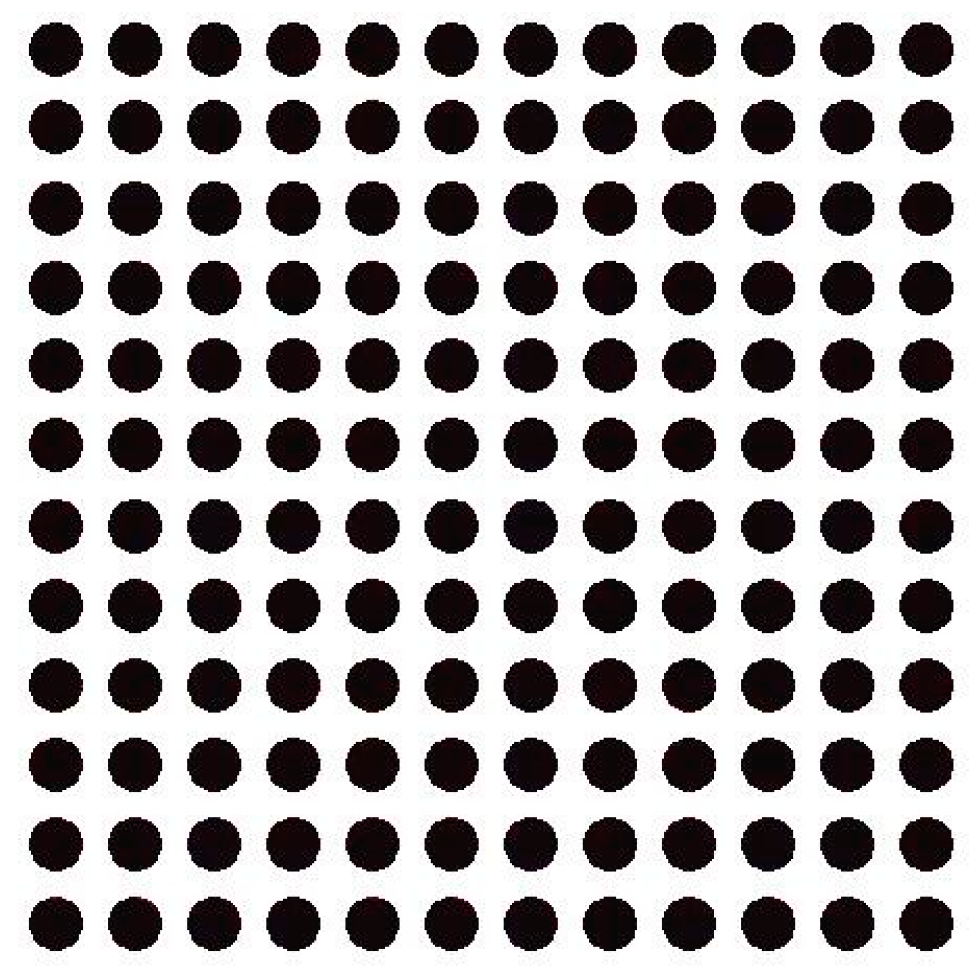
4.3. Spot Segmentation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fodor, S.P.; Read, J.L.; Pirrung, M.C.; Stryer, L.; Lu, A.T.; Solas, D. Light-directed, spatially addressable parallel chemical synthesis. Science 1991, 251, 767–773. [Google Scholar] [CrossRef] [PubMed]
- Heller, M.J. DNA microarray technology: Devices, systems, and applications. Annu. Rev. Biomed. Eng. 2002, 4, 129–153. [Google Scholar] [CrossRef] [PubMed]
- Ali, T.R.; Li, M.S.; Langford, P.R. Monitoring gene expression using DNA arrays. Methods Mol. Med. 2003, 71, 119–134. [Google Scholar] [PubMed]
- Levitsky, I.A.; Euler, W.B.; Tokranova, N.; Rose, A. Fluorescent polymer-porous silicon microcavity devices for explosive detection. Appl. Phys. Lett. 2007, 90, 1781. [Google Scholar] [CrossRef]
- Stears, R.L.; Martinsky, T.; Schena, M. Trends in microarray analysis. Nat. Med. 2003, 9, 140–145. [Google Scholar] [CrossRef] [PubMed]
- Manzano, M.; Cecchini, F.; Fontanot, M. OLED-based DNA biochip for Campylobacter spp. detection in poultry meat samples. Biosens. Bioelectron. 2015, 66, 271–276. [Google Scholar] [CrossRef] [PubMed]
- Chiang, Y.Z.; Zhao, C.; Melbourne, W. Biochip immunofluorescence microscopy as a new diagnostic tool for autoimmune blistering skin diseases in Australia. In Proceedings of the Meeting of the Medical-Dermatology-Society, San Francisco, CA, USA, 19 March 2015; p. 1926. [Google Scholar]
- Zhou, Z.; Xu, L.; Wu, S.; Su, B. A novel biosensor array with a wheel-like pattern for glucose, lactate and choline based on electrochemiluminescence imaging. Analyst 2014, 139, 4934–4939. [Google Scholar] [CrossRef] [PubMed]
- Yeh, C.-H.; Chang, Y.-H.; Lin, H.-P. A newly developed optical biochip for bacteria detection hybridization. Sens. Actuators B Chem. 2012, 161, 1168–1175. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, L.; Wang, X.; Shi, H.; Chong, X.; Ma, S.; Ji, Y.; Guo, J.; Ma, H.; He, Y. Polarization Interferometry Based Wavelength-Interrogation Surface Plasmon Resonance Imager for Analysis of Microarrays. J. Biomed. Opt. 2012, 11, 036002. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Ma, X.; Zhao, M.; Qi, P.; Zhong, J. Quick and Label-Free Detection for Coumaphos by Using Surface Plasmon Resonance Biochip. PLoS ONE 2014, 9, e104689. [Google Scholar] [CrossRef] [PubMed]
- He, L.P.; Shuang, L.; Dai, J.; Lü, H.B. Label-free high-throughput and real-time detections of protein interactions by oblique-incidence reflectivity difference method. Sci. China Phys. Mech. Astron. 2014, 57, 615–618. [Google Scholar] [CrossRef]
- Sharma, P.; Sharan, P. An Analysis and Design of Photonic Crystal-Based Biochip for Detection of Glycosuria. IEEE Sens. J. 2015, 15, 5569–5575. [Google Scholar] [CrossRef]
- Zhao, Z.; Hui, M.; Liu, M.; Dong, L.; Liu, X.; Zhao, Y. Centroid shift analysis of microlens array detector in interference imaging system. Opt. Commun. 2015, 354, 132–139. [Google Scholar] [CrossRef]
- Ye, L.; Huang, N.L.; Ma, X.-L. Establishment of N-succinimidyl 4-(maleimidomethyl) cyclohexanecarboxylate (SMCC) modified biochip enabling concurrent detection of serum infectious antibodies in neuroborreliosis. Biosens. Bioelectron. 2016, 78, 404–410. [Google Scholar] [CrossRef] [PubMed]
- Xuefeng, W.; Zhong, M.; Yanyan, W.; Liang, T. Gold nanorod biochip functionalization by antibody thiolation. Talanta 2015, 136, 1–8. [Google Scholar]
- Kim, M.I.; Park, T.J.; Paskaleva, E.E.; Sun, F.; Seo, J.W.; Mehta, K.K. Nanotechnologies for Biosensor and Biochip. J. Nanomater. 2015, 420734. [Google Scholar] [CrossRef]
- Ge, Y.; Yin, X. Simulation of gold nanoparticles aggravating MEMS cantilever optical static detection Biochip. Adv. Mater. Res. 2013, 694–697, 966–970. [Google Scholar] [CrossRef]
- Hwang, S.Y.; Seo, I.J.; Lee, S.Y. Microfluidic multiplex biochip based on a point-of-care electrochemical detection system for matrix metalloproteinases. J. Electroanal. Chem. 2015, 756, 118–123. [Google Scholar] [CrossRef]
- Schmidt, S.; Flueckiger, J.; Wu, W.; Grist, S.M.; Talebi Fard, S.; Donzella, V.; Khumwan, P.; Thompson, E.R.; Wang, Q.; Kulik, P.; et al. Improving the performance of silicon photonic rings, disks, and Bragg gratings for use in label-free biosensing. In Proceedings of the SPIE—The International Society for Optical Engineering, Bruxelles, France, 14–17 April 2014; Volume 9166. [Google Scholar]
- Donzella, V.; Sherwali, A.; Flueckiger, J.; Grist, S.M.; Fard, S.T.; Chrostowski, L. Design and fabrication of SOI micro-ring resonators based on sub-wavelength grating waveguides. Opt. Express 2015, 23, 4791–4803. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Jia, Z.; Li, P.; Wen, H.; Lv, G.; Huang, X. Parallel Detection of Refractive Index Changes in a Porous Silicon Microarray Based on Digital Images. Sensors 2017, 17, 750. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Jia, Z.; Li, P.; Lv, G.; Lv, X. Refractive index change detection based on porous silicon microarray. Appl. Phys. B 2016, 122, 1–6. [Google Scholar] [CrossRef]
- Tessier, D.C.; Boughaba, S.; Arbour, M.; Roos, P.; Pan, G. Improved surface sensing of DNA on gas-etched porous silicon. Sens. Actuators B 2006, 120, 220–230. [Google Scholar] [CrossRef]
- Zhang, H.; Jia, Z.; Lv, X.; Zhou, J.; Chen, L.; Liu, R.; Ma, J. Porous silicon optical microcavity biosensor on silicon-on-insulator wafer for sensitive DNA detection. Biosens. Bioelectron. 2013, 44, 89–94. [Google Scholar] [CrossRef] [PubMed]
- Meskini, O.; Abdelghani, A.; Tlili, A.; Mgaieth, R.; Jaffrezic-Renault, N.; Martelet, C. Porous silicon as functionalized material for immunosensor application. Talanta 2007, 71, 1430–1433. [Google Scholar] [CrossRef] [PubMed]
- Rong, G.; Ryckman, J.D.; Mernaugh, R.L.; Weiss, S.M. Label-free porous silicon membrane waveguide for DNA sensing. Appl. Phys. Lett. 2008, 93, 528. [Google Scholar] [CrossRef]
- Rong, G.; Najmaie, A.; Sipe, J.E.; Weiss, S.M. Nanoscale porous silicon waveguide for label-free DNA sensing. Biosens. Bioelectron. 2008, 23, 1572–1576. [Google Scholar] [CrossRef] [PubMed]
- Li, P.; Jia, Z.; Lü, X.; Liu, Y.; Ning, X.; Mo, J.; Wang, J. Spectrometer-free biological detection method using porous silicon microcavity devices. Opt. Express 2015, 23, 24626–24633. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.K.; Huang, C.W. DNA microarray image analysis using active contour model. In Proceedings of the IEEE Conference on Computational Systems Bioinformatics, Stanford, CA, USA, 19 August 2004; pp. 549–550. [Google Scholar]
- Wang, Y.; Shih, F.Y.; Ma, M.Q. Precise gridding of microarray images by detecting and correcting rotations in subarrays. In Proceedings of the 8th Joint Conference on Information Sciences, Newark, CA, USA, 21–26 July 2005; 2005; pp. 1195–1198. [Google Scholar]
- Zacharia, E.; Maroulis, D. 3-d spot modeling for automatic segmentation of cDNA microarray images. IEEE Trans. Nanobiosci. 2010, 9, 181. [Google Scholar] [CrossRef] [PubMed]
- Liew, W.C.; Yan, H.; Yang, M. Robust adaptive spot segmentation of DNA microarray images. Pattern Recognit. 2003, 36, 1251–1254. [Google Scholar] [CrossRef]
- Demirkaya, O.; Asyali, M.H.; Shoukri, M.M. Segmentation of cDNA microarray spots using Markov radom field modeling. Bioinformatics 2005, 21, 2994–3000. [Google Scholar] [CrossRef] [PubMed]
- Kittler, J.; Illingworth, J. Minimum error threshold. Pattern C 1986, 19, 41–47. [Google Scholar] [CrossRef]
- Jiulun, F.; Winxin, X. Minimum error thresholding: A note. Pattern Recognit. Lett. 1997, 18, 705–709. [Google Scholar] [CrossRef]
- Kapur, J.N.; Sahoo, P.K.; Wong, A.K.C. A new method for gray-level picture thresholding using the entropy of the histogram. Comput. Vis. Graph. Image Process. 1985, 29, 273–285. [Google Scholar] [CrossRef]
- Abassy, T.A.; El-Tawil, M.A.; Zoheiry, H.E. Toward a modified variational iteration method. J. Comput. Appl. Math. 2007, 207, 137–147. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Burdescu, D.D.; Brezovan, M.; Ganea, E.; Stanescu, L. A New Method for Segmentation of Images Represented in a HSV Color Space; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Brese, C.L.; Zou, J.J. Automatic Gridding of Rotated Microarray Images. In Proceedings of the International Conference on Biomedical and Pharmaceutical Engineering, Singapore, 11–14 December 2006; pp. 34–38. [Google Scholar]
- Bracewell, R.N. The Fourier Transform & Its Applications; WCB/McGraw Hill: New York, NY, USA, 2000. [Google Scholar]
- Aithal, P.K.; Rajesh, G.; Acharya, U.D.; Siddalingaswamy, P.C. A fast and novel skew estimation approach using radon transform. Int. J. Comput. Inf. Syst. Ind. Manag. Appl. 2013, 5, 337–344. [Google Scholar]
- Antoniol, G.; Ceccarelli, M.; Petrosino, A. Microarray image addressing based on the Radon transform. In Proceedings of the IEEE Conference on Image Processing, Genova, Italy, 14 September 2005; pp. I-13–I-16. [Google Scholar]
- Deng, N.; Duan, H. An Automatic and Power Spectra-based Rotate Correcting Algorithm for Microarray Image. In Proceedings of the 2015 IEEE Engineering in Medicine and Biology 27th Annual Conference, Shanghai, China, 17–18 January 2005; pp. 898–901. [Google Scholar]
- Meyenhofer, F.; Schaad, O.; Descombes, P.; Kocher, M. Automatic analysis of microRNA Microarray images using Mathematical Morphology. In Proceedings of the 2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007; p. 6236. [Google Scholar]
- Chan, C.K.; Tan, S.T. Determination of the minimum bounding box of an arbitrary solid: An iterative approach. Comput. Struct. 2001, 79, 1433–1449. [Google Scholar] [CrossRef]
- Chaudhuria, D.; Samalb, A. A simple method for fitting of bounding rectangle to closed regions. Pattern Recognit. 2007, 40, 1981–1989. [Google Scholar] [CrossRef]
- Zhang, F.; Wang, G.; Zeng, Q.; Ye, J. New algorithm for minimum enclosing rectangle of the object in the image region based on center-of-gravity principle. Infrared Laser Eng. 2013, 42, 1382–1387. [Google Scholar]
- Bajcsy, P. An overview of DNA microarray grid alignment and foreground separation approaches. EURASIP J. Adv. Signal Process. 2006, 1, 1–13. [Google Scholar] [CrossRef]
- Guirong, W.; Jian, S. Microarray Image Processing Using Expectation Maximization Algorithm and Mathematical Morphology. In Proceedings of the IEEE Conference on CSO, Sanya, China, 24–26 April 2009; pp. 577–579. [Google Scholar]
- Wang, L.; Ni, X.; Lu, Z. Robust protein microarray image segmentation using improved seeded region growing algorithm. Chin. Opt. Lett. 2003, 1, 520–522. [Google Scholar]
- Park, C.B.; Lee, K.W.; Lee, S.W. Automatic Microarray Image Segmentation Based on Watershed Transformation. In Proceedings of the IEEE Conference on Pattern Recognition, Cambridge, UK, 26 August 2004; pp. 786–789. [Google Scholar]
- Gander, W.; Strebel, R.; Golub, G.H. Least-squares fitting of circles and ellipses. BIT Numer. Math. 1994, 34, 558–578. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Average Error (°) | Average Time (s) |
|---|---|---|
| Radon transform | 0.17 | 8.61 |
| MBR correction | 0.16 | 1.13 |
| Algorithm | Average Error (°) | Average Time (s) |
|---|---|---|
| Radon transform | 0.10 | 34.38 |
| MBR correction | 0.06 | 1.70 |
| Sample | Average Size (pixel) | Average Time (s) |
|---|---|---|
| 6 × 6 | 283 × 287 | 1.51 |
| 12 × 12 | 567 × 576 | 3.88 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Z.; Jia, Z.; Yang, J.; Kasabov, N.; Li, C. Image Processing of Porous Silicon Microarray in Refractive Index Change Detection. Sensors 2017, 17, 1335. https://doi.org/10.3390/s17061335
Guo Z, Jia Z, Yang J, Kasabov N, Li C. Image Processing of Porous Silicon Microarray in Refractive Index Change Detection. Sensors. 2017; 17(6):1335. https://doi.org/10.3390/s17061335
Chicago/Turabian StyleGuo, Zhiqing, Zhenhong Jia, Jie Yang, Nikola Kasabov, and Chuanxi Li. 2017. "Image Processing of Porous Silicon Microarray in Refractive Index Change Detection" Sensors 17, no. 6: 1335. https://doi.org/10.3390/s17061335
APA StyleGuo, Z., Jia, Z., Yang, J., Kasabov, N., & Li, C. (2017). Image Processing of Porous Silicon Microarray in Refractive Index Change Detection. Sensors, 17(6), 1335. https://doi.org/10.3390/s17061335