The applied quantity of N-fertilizer has a direct effect on agricultural productivity, environmental pollution, food security, ecosystem health, human health and economic prosperity [
1]. A recent study [
2] illustrates the large environmental impact of fertilizer in a wheat-to-bread supply chain. The use of ammonium nitrate fertilizer alone accounted for 43.4% of the overall Global Warming Potential (GWP) and 34.1% of the Eutrophication Potential (EP) in the production of a loaf of bread. According to [
1] the most immediate solutions to this fertilizer problem reside in increasing Nitrogen Use Efficiency (NUE) while maintaining high yield, through improved crop plant physiology but also through improved agronomic practices such as precision agriculture. Granular fertilizer is mostly spread by centrifugal fertilizer spreaders [
3,
4] due to their robustness, simplicity, low cost and large working widths [
5,
6]. The spreading process however is very sensitive to errors [
7,
8]. Poor fertilizer quality, erroneous configuration of the spreader or the lack of correct setting tables can lead to deviations between the desired and the actual spread pattern of fertilizer in the field [
9,
10]. Spreaders are often used without being calibrated for the specific fertilizer applied [
6] which can result in local under- and over-application of fertilizer [
9]. Spreader evaluation and calibration at farm level is traditionally done by using an in-field setup of collection trays, removing collected material and weighing the contents [
11] which is a laborious and time consuming process [
12]. In case of precision agriculture, close loop control systems are required with appropriate sensors to manage the local fertilization rate [
7,
13]. Different techniques have been investigated in literature to monitor parameters of fertilizer particles leaving the spreading vanes and/or use these parameters to determine the spread pattern using a ’predict rather than collect’ approach. Generally, these approaches use a ballistic flight model to determine the landing positions of individual particles. To calculate the trajectories, input data is necessary to initiate the equations of motion. This data can be simulated (modeling approach) or measured (hybrid approach). Different authors [
14,
15,
16,
17,
18,
19,
20,
21,
22] determined sets of differential equations with analytical or numerical solutions to describe motion of an individual particle along the spreading vanes. They illustrate that the particle dynamics depends on fertilizer physical properties and spreader parameters and provide some insight in the spreading process, however they ignore particle interactions. The Discrete Element Method (DEM) model by [
23,
24] takes these interactions into account. The model shows promising results for short vanes and a reduced disk speed (300 rpm). However, increasing deviations were found at higher (more realistic) disc speeds [
25,
26]. Furthermore, quantitative simulations require specific physical characteristics of fertilizer particles that are difficult to measure. Because particle motion on the disk proves difficult to predict, hybrid approaches have been developed, combining the use of a ballistic model with the measurement of parameters of particles leaving the vanes. In [
27] three dimensional (3D) particle velocities in a 20 mm × 20 mm area were measured using a technique based on the ultrasonic Doppler frequency shift using one transmitter and three receivers. The technique was also used to determine particle size however this proved less accurate. An optical sensor was developed in [
28] using two photosensitive arrays, a light source and a converging and diverging lens to determine radial velocity and diameter of particles passing through a 30 mm orifice. Particle velocity and diameter were estimated with 5% and 2% accuracy respectively. In the work reported in [
29] the sensor was fitted to a rotating arm with an encoder to scan the area around the spreading disk. However, the mounting configuration implied that only the radial velocity component could be measured, which according to the authors was the reason for the under-estimation of the spreading width. In [
13], asingle-camera stroboscopic image acquisition technique and corresponding image processing algorithms were presented to measure horizontal outlet angle and velocity of particles. An imaging technique was developed by [
30] to derive the same parameters based on motion blurred images, on which particle trajectories appeared as straight lines due to continuous lighting during camera exposure. Due to the fact that only two-dimensional information was obtained, both single camera techniques were applicable only in the case of flat spreading disks (nowadays rarely used in practice due to a limited working width), assuming that particle trajectories near the spreader were parallel to the image plane. However even in the latter case, particles leave the spreader with a vertical angle [
5], causing errors in the calculated diameters and velocity vectors. The motion blurring technique was extended in the study of [
7] to determine 3D velocity components of particles based on spreader configuration parameters and the measured horizontal outlet angle. The system depends on a kinematic relationship between the particle velocity on the disk and the spreader configuration (disk parameters) and horizontal outlet angle [
21] thereby ignoring particle interactions. Because of the blurring technique, particle size could not be determined [
31] developed a test bench (CEMIB) with a row of collection trays with weighing sensors, capable of measuring the spread pattern in two spatial dimensions in a test hall (40 m × 10 m). A stereo-configuration of high speed cameras and corresponding image processing algorithms was used by [
32] to determine particle positions and velocities (based on two subsequent positions) in three dimensions, independent of the spreader configuration. However, due to the large field of view (1 m
2), which resulted in a small particle resolution, and the limited distance between cameras, the uncertainty of the predicted 3D positions (and subsequently the velocities) was too high. Furthermore, illumination intensity and variability were found insufficient and the orientation of the camera with respect to the spreader needed to be determined manually before each test. Using a multiple objective genetic algorithm, an illumination system was developed by [
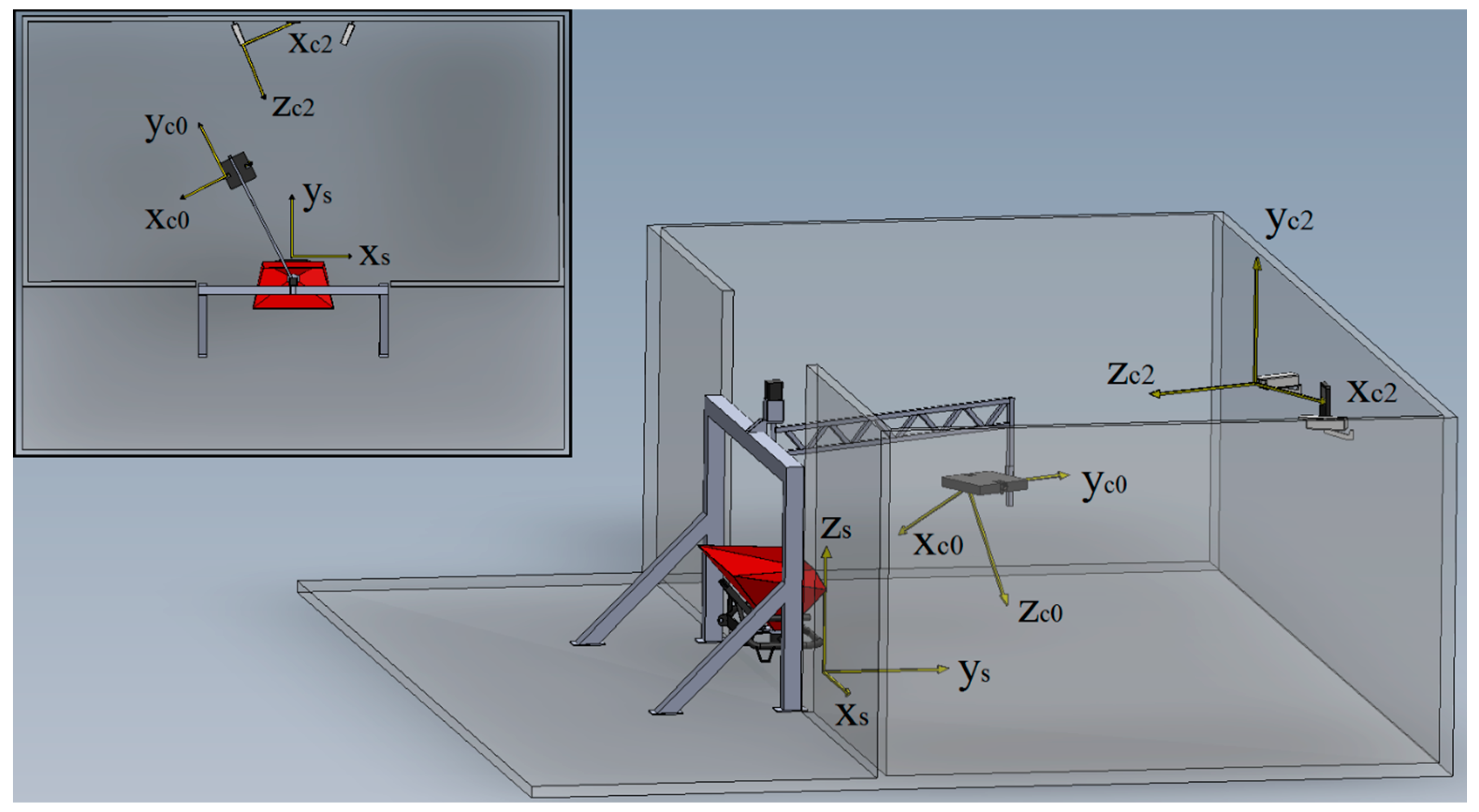
33] based on high power LEDs, providing sufficient radiant power and high uniformity for multi-exposure image acquisition of moving fertilizer particles. In this study, a new measurement system with four cameras was developed to accurately determine the position and velocity of fertilizer particles in three dimensions, and express these relative to a coordinate system associated with the spreader. In contrast to previous work, also the size of the individual particles could be determined. Landing positions of individual particles are calculated using a ballistic model including the effect of wind and tractor motion and from this, the spread pattern can be calculated. The system enables a fast and labor extensive determination of the spread pattern of fertilizer spreaders and will be used for calibration of fertilizer spreaders in practice.

 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}