Equivalent Circuit Model of Low-Frequency Magnetoelectric Effect in Disk-Type Terfenol-D/PZT Laminate Composites Considering a New Interface Coupling Factor


Abstract
:1. Introduction
2. Theoretical Analysis
2.1. Equivalent Circuit of Magnetostrictive Layer
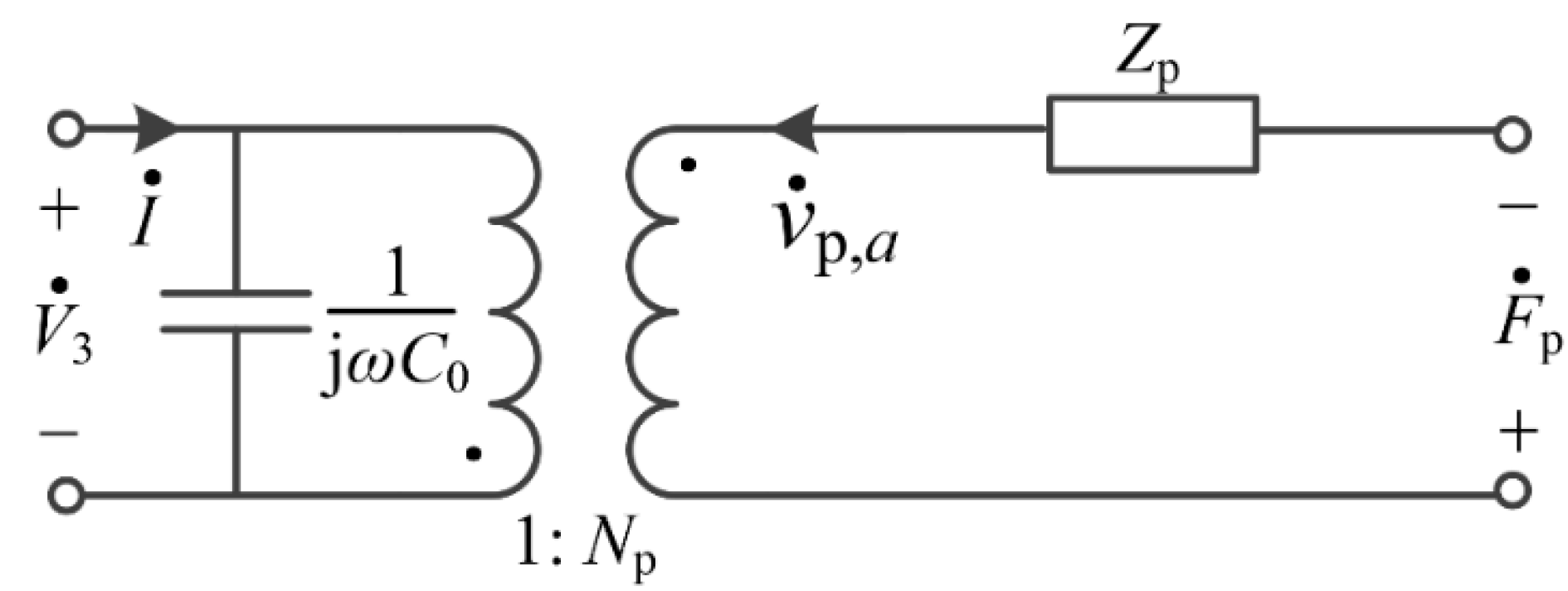
2.2. Equivalent Circuit of Piezoelectric Layer
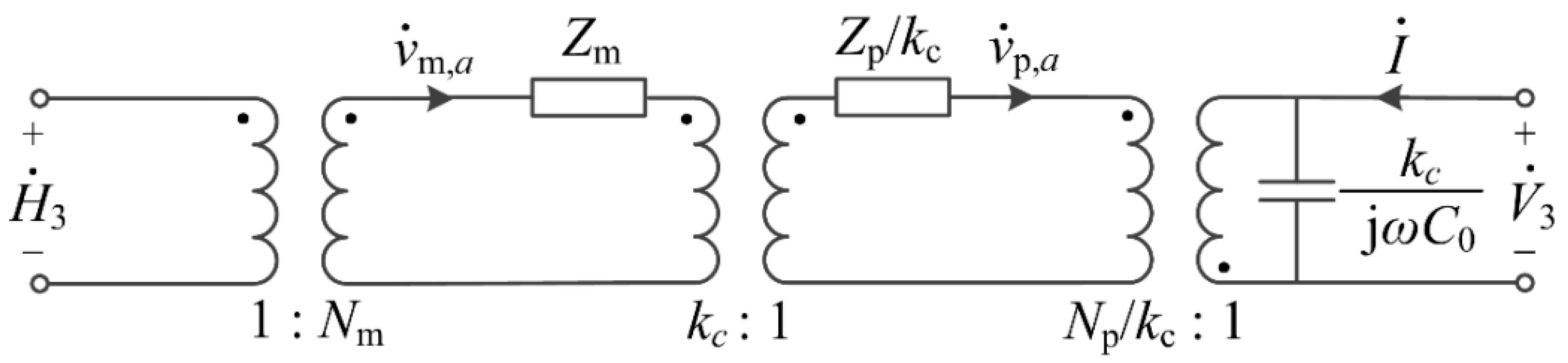
2.3. Introducing Interface Coupling Factor
3. Sample Fabrication and Experimental Setup
4. Results and Discussions
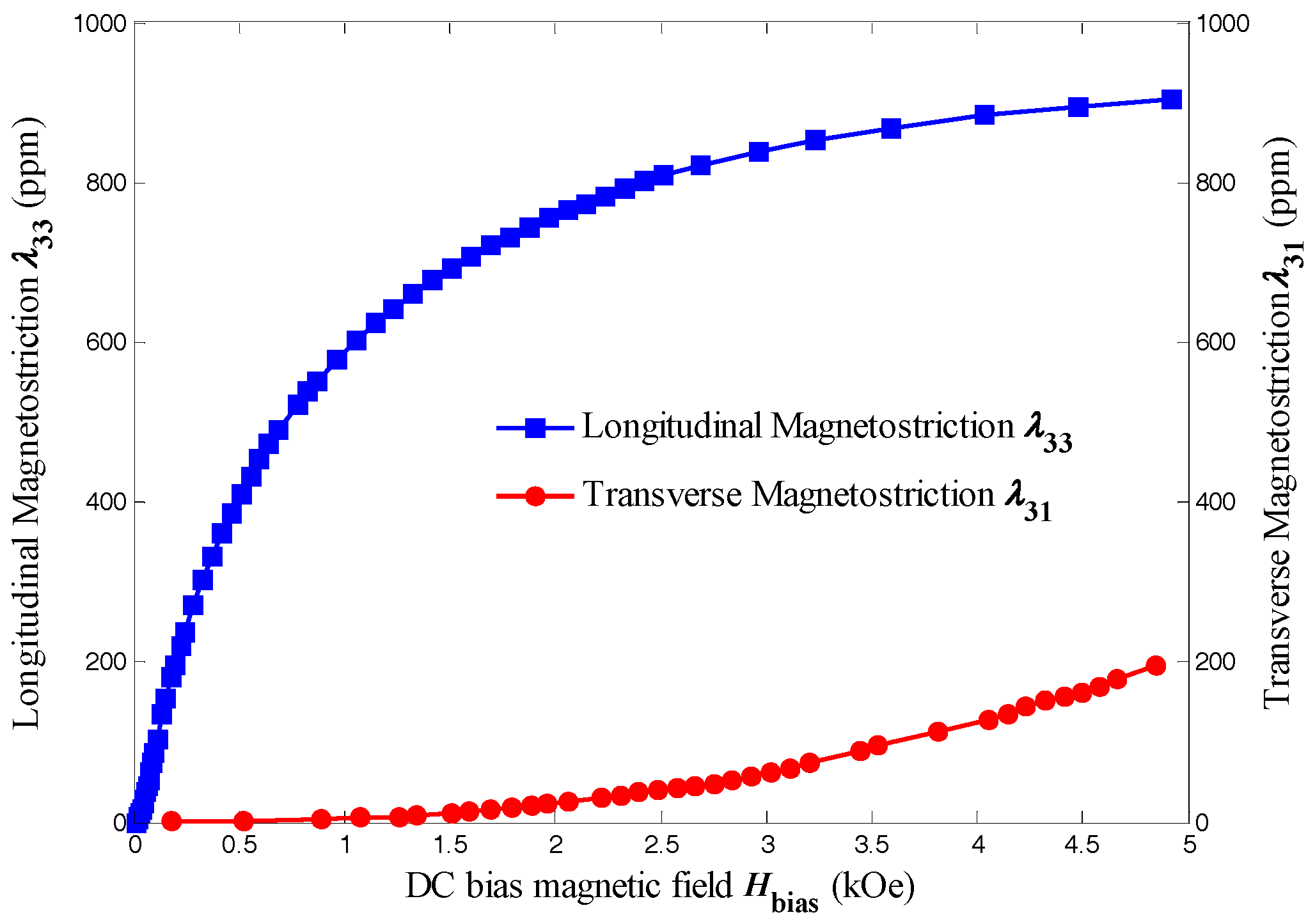
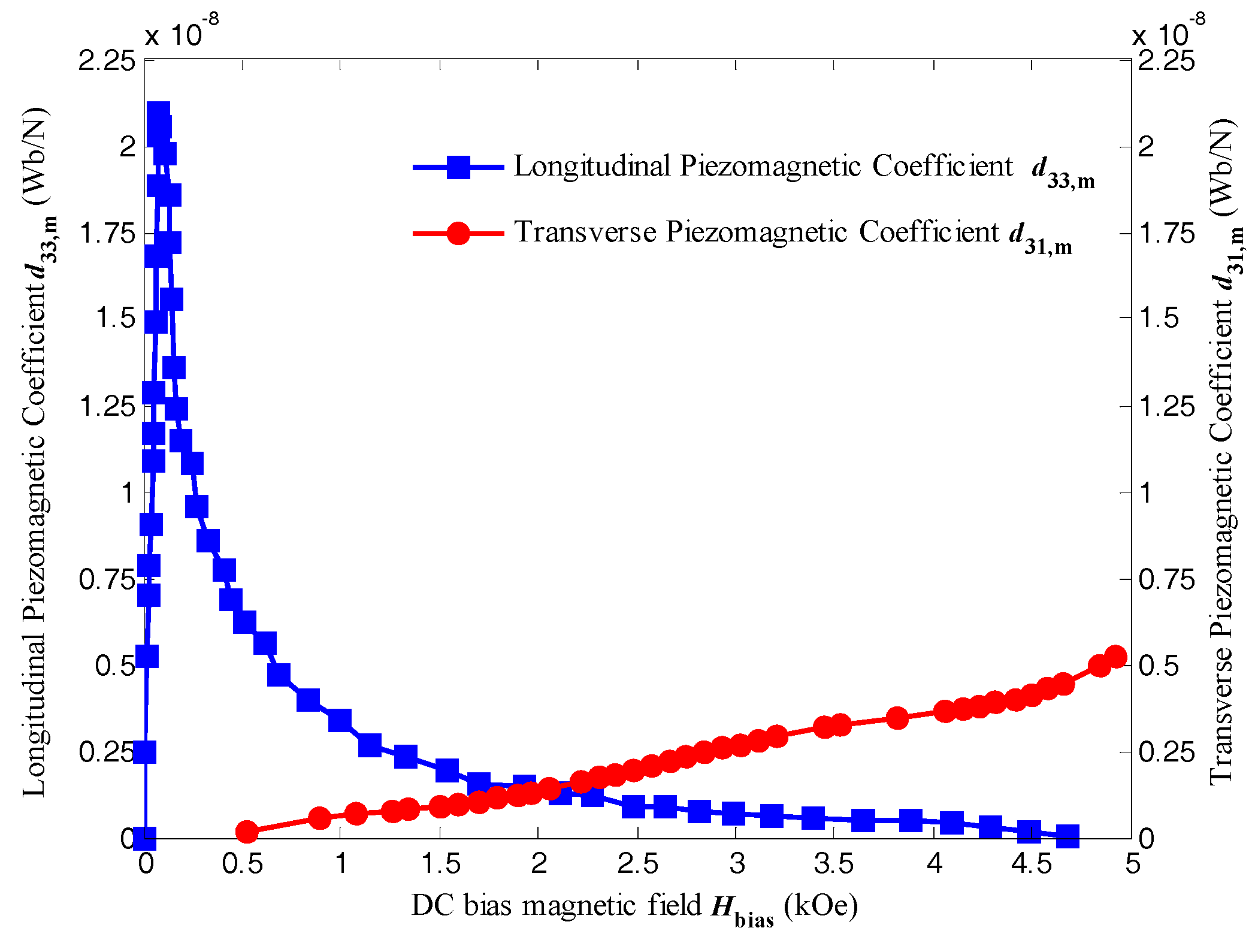
4.1. Magnetostriction and Piezomagnetic Coefficient
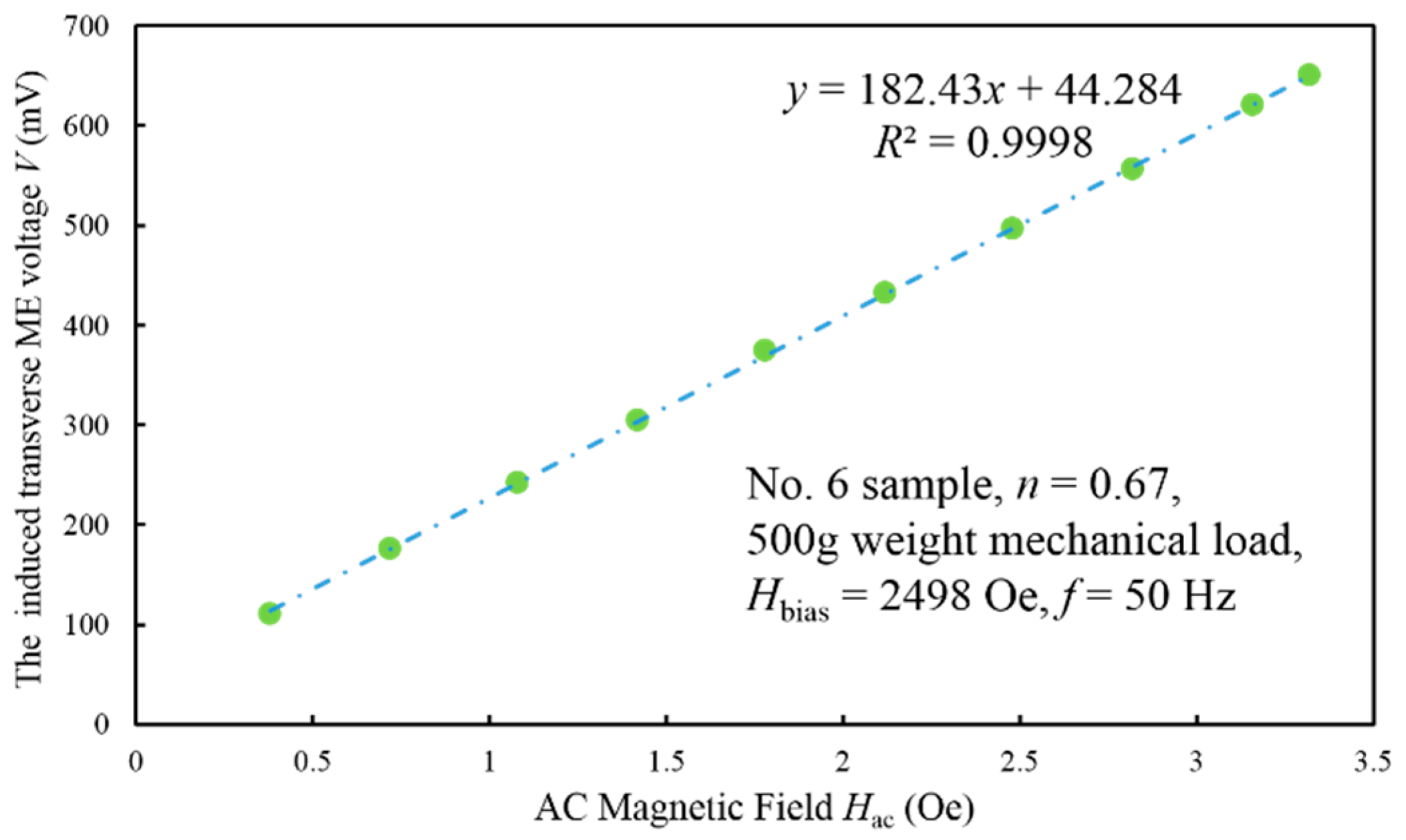
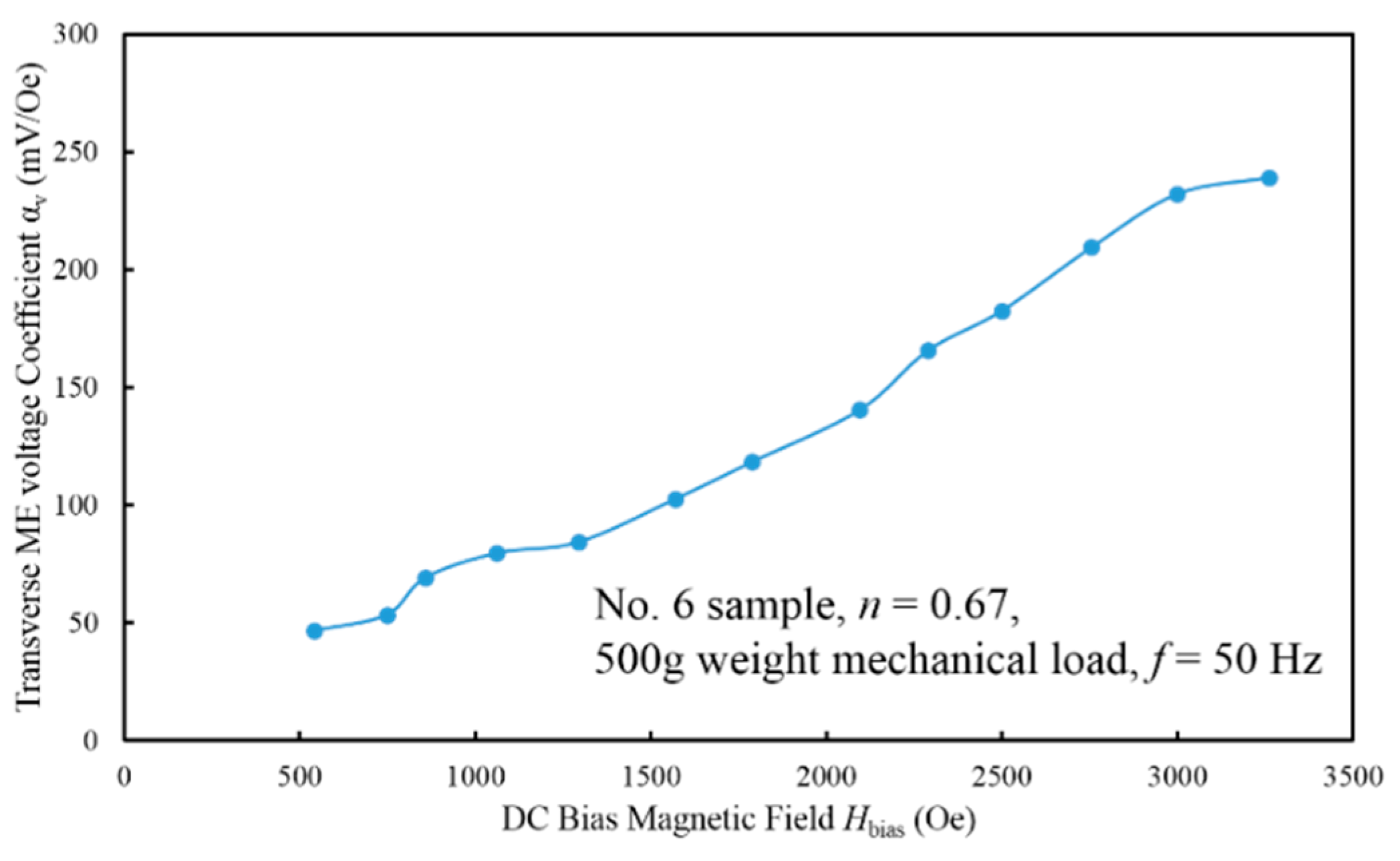
4.2. ME Voltage Coefficient
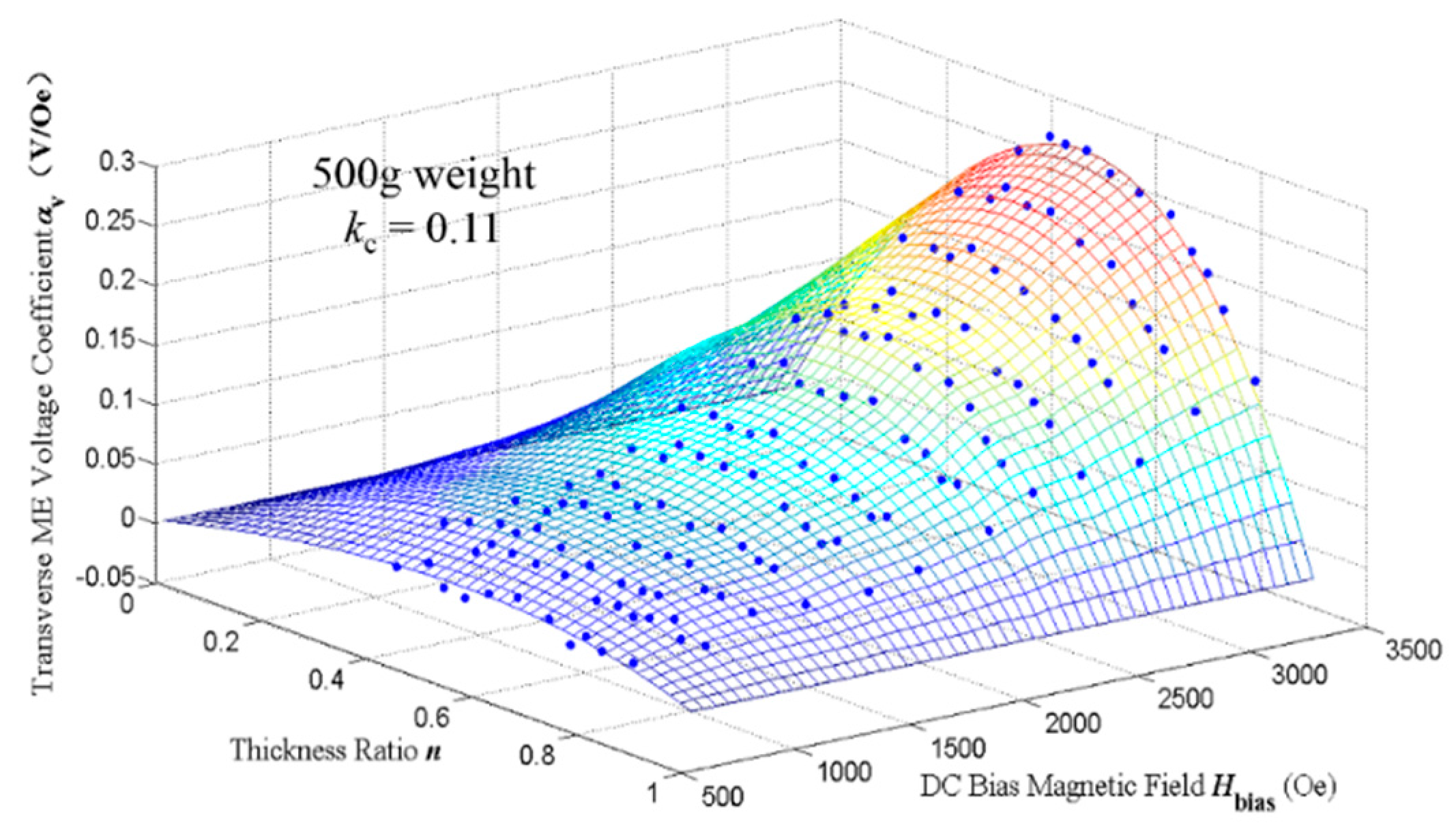
4.3. Interface Coupling Factor
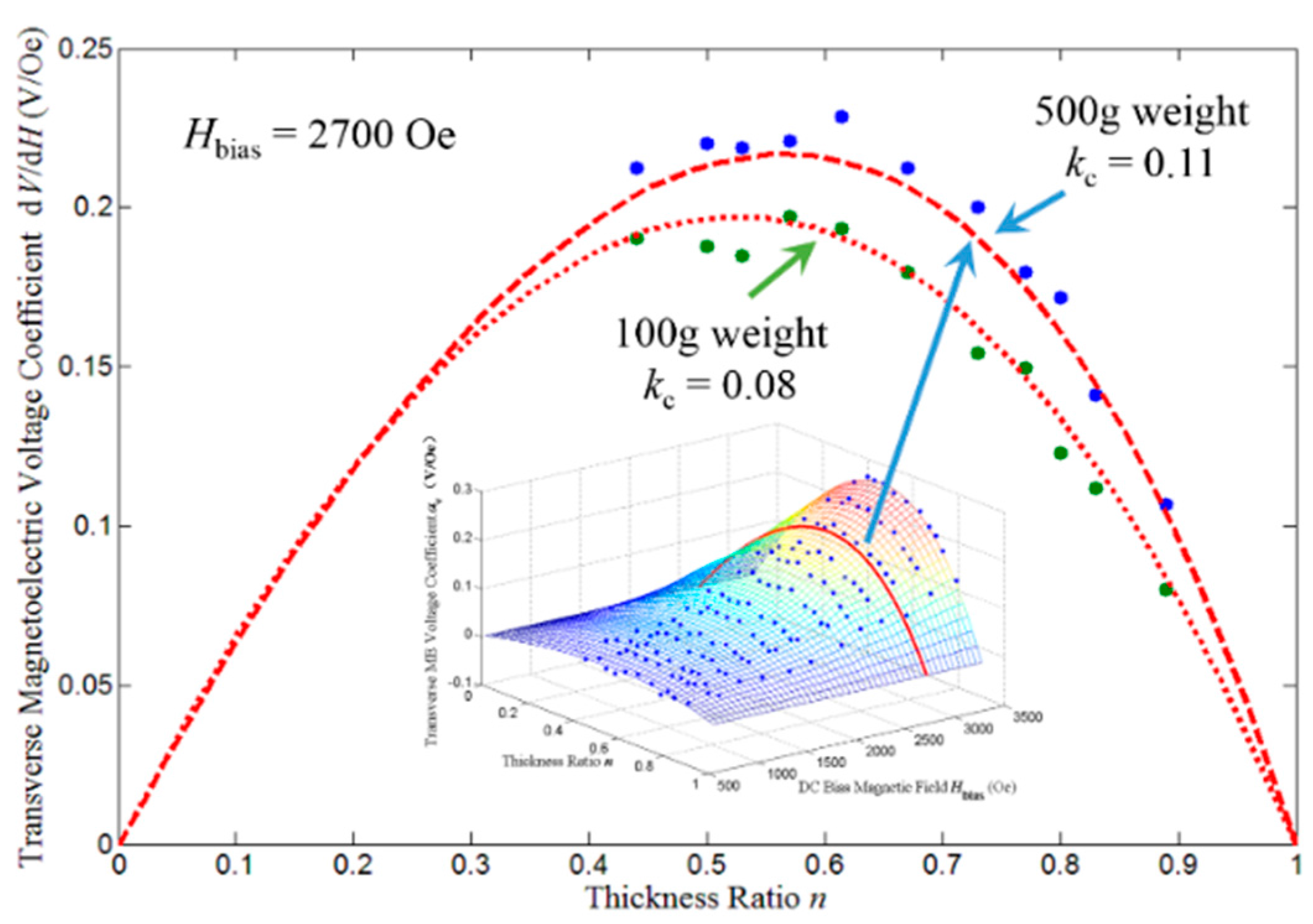
4.4. The Optimum Thickness Ratio
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fiebig, M. Revival of the magnetoelectric effect. J. Phys. D Appl. Phys. 2005, 38, R123–R152. [Google Scholar] [CrossRef]
- Eerenstein, W.; Mathur, N.D.; Scott, J.F. Multiferroic and magnetoelectric materials. Nature 2006, 442, 759–765. [Google Scholar] [CrossRef] [PubMed]
- Nan, C.; Bichurin, M.I.; Dong, S.; Viehland, D.; Srinivasan, G. Multiferroic magnetoelectric composites: Historical perspective, status, and future directions. J. Appl. Phys. 2008, 103, 31101. [Google Scholar] [CrossRef]
- Curie, P. On symmetry in physical phenomena, symmetry of an electric field and of a magnetic field. J. Phys. 1894, 1, 393–416. [Google Scholar]
- Van Suchtelen, J. Product properties: A new application of composite materials. Philips Res. Rep. 1972, 1, 28–37. [Google Scholar]
- Newnham, R.E.; Skinner, D.P.; Cross, L.E. Connectivity and piezoelectric-pyroelectric composites. Mater. Res. Bull. 1978, 13, 525–536. [Google Scholar] [CrossRef]
- Nan, C. Magnetoelectric effect in composites of piezoelectric and piezomagnetic phases. Phys. Rev. B 1994, 50, 6082–6088. [Google Scholar] [CrossRef]
- Ryu, J.; Carazo, A.V.; Uchino, K.; Kim, H. Magnetoelectric Properties in Piezoelectric and Magnetostrictive Laminate Composites. Jpn. J. Appl. Phys. 2001, 40, 4948–4951. [Google Scholar] [CrossRef]
- Ryu, J.; Priya, S.; Carazo, A.V.; Uchino, K.; Kim, H. Effect of the Magnetostrictive Layer on Magnetoelectric Properties in Lead Zirconate Titanate/Terfenol-D Laminate Composites. J. Am. Ceram. Soc. 2001, 84, 2905–2908. [Google Scholar] [CrossRef]
- Ryu, J.; Priya, S.; Uchino, K.; Kim, H. Magnetoelectric Effect in Composites of Magnetostrictive and Piezoelectric Materials. J. Electroceram. 2002, 8, 107–119. [Google Scholar] [CrossRef]
- Harshe, G.R. Magnetoelectric Effect in Piezoelectric-Magnetostrictive Composites. Ph.D. Thesis, The Pennsylvania State University, State College, PA, USA, 1991. [Google Scholar]
- Harshe, G.; Dougherty, J.P.; Newnham, R.E. Theoretical modelling of multilayer magnetoelectric composites. Int. J. Appl. Electromagn. Mater. 1993, 4, 145–159. [Google Scholar]
- Avellaneda, M.; Harshé, G. Magnetoelectric Effect in Piezoelectric/Magnetostrictive Multilayer (2-2) Composites. J. Intell. Mater. Syst. Struct. 1994, 5, 501–513. [Google Scholar] [CrossRef]
- Nan, C. Theoretical approach to the coupled thermal-electrical-mechanical properties of inhomogeneous media. Phys. Rev. B 1994, 49, 12619–12624. [Google Scholar] [CrossRef]
- Nan, C. Effective-medium theory of piezoelectric composites. J. Appl. Phys. 1994, 76, 1155–1163. [Google Scholar] [CrossRef]
- Bichurin, M.I.; Petrov, V.M.; Srinivasan, G. Theory of low-frequency magnetoelectric effects in ferromagnetic-ferroelectric layered composites. J. Appl. Phys. 2002, 92, 7681–7683. [Google Scholar] [CrossRef]
- Bichurin, M.I.; Filippov, D.A.; Petrov, V.M.; Laletsin, V.M.; Paddubnaya, N.; Srinivasan, G. Resonance magnetoelectric effects in layered magnetostrictive-piezoelectric composites. Phys. Rev. B 2003, 68, 132408. [Google Scholar] [CrossRef]
- Filippov, D.A. Theory of the Magnetoelectric Effect in Ferromagnetic–Piezoelectric Heterostructures. Phys. Solid State 2005, 47, 1118–1121. [Google Scholar] [CrossRef]
- Martins, P.; Lanceros-Méndez, S. Polymer-Based Magnetoelectric Materials. Adv. Funct. Mater. 2013, 23, 3371–3385. [Google Scholar] [CrossRef]
- Silva, M.; Reis, S.; Lehmann, C.S.; Martins, P.; Lanceros-Méndez, S.; Lasheras, A.; Gutiérrez, J.; Barandiaran, J.M. Optimization of the Magnetoelectric Response of Poly(vinylidene fluoride)/Epoxy/Vitrovac Laminates. ACS Appl. Mater. Interfaces 2013, 5, 10912–10919. [Google Scholar] [CrossRef] [PubMed]
- Martins, P.; Silva, M.; Lanceros-Méndez, S. Determination of the magnetostrictive response of nanoparticles via magnetoelectric measurements. Nanoscale 2015, 7, 9457–9461. [Google Scholar] [CrossRef] [PubMed]
- Dong, S.; Li, J.; Viehland, D. Longitudinal and transverse magnetoelectric voltage coefficients of magnetostrictive/piezoelectric laminate composite: Theory. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2003, 50, 1253–1261. [Google Scholar] [CrossRef] [PubMed]
- Dong, S.; Zhai, J. Equivalent circuit method for static and dynamic analysis of magnetoelectric laminated composites. Chin. Sci. Bull. 2008, 53, 2113–2123. [Google Scholar] [CrossRef]
- Dong, S.; Li, J.; Viehland, D. Longitudinal and transverse magnetoelectric voltage coefficients of magnetostrictive/piezoelectric laminate composite: Experiments. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2004, 51, 794–799. [Google Scholar] [CrossRef] [PubMed]
- Mason, W.P. A Dynamic Measurement of the Elastic, Electric and Piezoelectric Constants of Rochelle Salt. Phys. Rev. 1939, 55, 775–789. [Google Scholar] [CrossRef]
- Mason, W.P. Physical Acoustics, Principle and Methods; Academic Press: New York, NY, USA, 1964; pp. 169–270. [Google Scholar]
- Engdahl, G. Handbook of Giant Magnetostrictive. Materials; Academic Press: San Diego, CA, USA, 2000; pp. 135–145. [Google Scholar]
- Ballato, A. Modeling piezoelectric and piezomagnetic devices and structures via equivalent networks. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2001, 48, 1189–1240. [Google Scholar] [CrossRef] [PubMed]
- Dong, S.; Zhai, J.; Li, J.; Viehland, D. Small dc magnetic field response of magnetoelectric laminate composites. Appl. Phys. Lett. 2006, 88, 82907. [Google Scholar] [CrossRef]
- Eccobond 45. Available online: www.lindberg-lund.fi/files/Tekniske%20datablad/EC-45-TD.pdf (accessed on 3 June 2017).
- Yu, X.; Lou, G.; Chen, H.; Wen, C.; Lu, S. A Slice-Type Magnetoelectric Laminated Current Sensor. IEEE Sens. J. 2015, 15, 5839–5850. [Google Scholar] [CrossRef]
- Yu, X.; Wu, T.; Li, Z. Wireless energy transfer system based on metglas/PFC magnetoelectric laminated composites. Acta Phys. Sin. 2013, 62, 58503. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | d31,m or g31,p | or | σ | μr | kp |
|---|---|---|---|---|---|
| Terfenol-D 1 | 2 × 10−10 Wb/N | 125 × 10−12 m2/N | 0.35 | 5 | |
| PZT-5 2 | 10 × 10−3 Vm/N | 13.5 × 10−12 m2/N | 0.36 | 1 | 0.62 |
| Sample Number | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Terfenol-D (mm) | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| PZT-5 (mm) | 0.5 | 0.8 | 1 | 1.2 | 1.5 | 2 | 2.5 | 3 | 3.5 | 4 | 5 |
| Thickness ratio n | 0.89 | 0.83 | 0.8 | 0.77 | 0.73 | 0.67 | 0.615 | 0.57 | 0.53 | 0.5 | 0.44 |
| Pre-mechanical load | 500 g weight | ||||||||||
| Sample Number | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Terfenol-D (mm) | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| PZT-5 (mm) | 0.5 | 0.8 | 1 | 1.2 | 1.5 | 2 | 2.5 | 3 | 3.5 | 4 | 5 |
| Thickness ratio n | 0.89 | 0.83 | 0.8 | 0.77 | 0.73 | 0.67 | 0.615 | 0.57 | 0.53 | 0.5 | 0.44 |
| Pre-mechanical load | 100 g weight | ||||||||||
| Parameters | Values | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Hbias (Oe) | 541 | 748 | 857 | 1059 | 1294 | 1569 | 1787 | 2095 | 2288 | 2498 | 2754 | 2998 | 3259 |
| d31,m (10−10 A/m) | 0.9 | 1.4 | 1.7 | 1.92 | 2.05 | 2.60 | 2.90 | 3.70 | 4.54 | 4.85 | 5.70 | 6.60 | 7.40 |
| αv (mV/Oe) | 46.57 | 53.32 | 69.03 | 79.51 | 84.22 | 102.52 | 118.21 | 140.39 | 165.58 | 182.43 | 209.43 | 232.11 | 239.10 |
| Calculated kc | 0.224 | 0.113 | 0.129 | 0.134 | 0.131 | 0.122 | 0.129 | 0.113 | 0.106 | 0.111 | 0.106 | 0.099 | 0.086 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lou, G.; Yu, X.; Lu, S. Equivalent Circuit Model of Low-Frequency Magnetoelectric Effect in Disk-Type Terfenol-D/PZT Laminate Composites Considering a New Interface Coupling Factor. Sensors 2017, 17, 1399. https://doi.org/10.3390/s17061399
Lou G, Yu X, Lu S. Equivalent Circuit Model of Low-Frequency Magnetoelectric Effect in Disk-Type Terfenol-D/PZT Laminate Composites Considering a New Interface Coupling Factor. Sensors. 2017; 17(6):1399. https://doi.org/10.3390/s17061399
Chicago/Turabian StyleLou, Guofeng, Xinjie Yu, and Shihua Lu. 2017. "Equivalent Circuit Model of Low-Frequency Magnetoelectric Effect in Disk-Type Terfenol-D/PZT Laminate Composites Considering a New Interface Coupling Factor" Sensors 17, no. 6: 1399. https://doi.org/10.3390/s17061399
APA StyleLou, G., Yu, X., & Lu, S. (2017). Equivalent Circuit Model of Low-Frequency Magnetoelectric Effect in Disk-Type Terfenol-D/PZT Laminate Composites Considering a New Interface Coupling Factor. Sensors, 17(6), 1399. https://doi.org/10.3390/s17061399