1. Introduction
Blood provides the most diverse and complex source of information about a body among human biofluids. Decades of studies have shown that the physical parameters of blood correlate with various cardiovascular diseases, such as hypertension [
1,
2], diabetes [
3], myocardial infarction [
4], and coronary heart disease [
5]. Therefore, it is expected that a comprehensive analysis of various physical characteristics of blood can enable an accurate and rapid diagnosis of cardiovascular diseases or aid in patient monitoring. Specifically, blood viscosity is known as a representative indicator that is influenced by blood cell characteristics (such as hematocrit, deformability, aggregation) and plasma viscosity [
6]. Thus, the accurate measurement of blood viscosity is essential for a comprehensive analysis of the various physical indicators in blood.
Viscosity as a hydrodynamic term is a measure of the resisting force acting against the applied shear force. Blood, especially, is a representative non-Newtonian fluid, i.e., its viscosity varies according to the shear rate. This implies that the most important objective in measuring blood viscosity is to obtain not only a single viscosity value at a specific shear rate, but also multiple viscosity values under a wide range of shear rates.
Conventional methods for measuring viscosity on a macroscopic scale include respective use of a capillary viscometer, falling ball viscometer, and rotational viscometer [
7]. By leveraging gravitational force, methods of measuring the speed of a capillary-driven fluid or the velocity of a ball falling in a fluid-filled tube have been developed. These classic methods are accurate; nevertheless, they have limitations in actively controlling shear rate conditions. Rotational viscometers that have either a coaxial cylinder or a cone and plate overcome this problem by varying the angular velocity of the cylinder or cone. It is additionally possible that a wide shear rate condition may be required to measure the viscosity of a non-Newtonian fluid such as blood. However, this approach is disadvantageous in terms of the requisite bulky and expensive equipment, large sample consumption, and long measurement time.
The above limitations have led to the introduction of microfluidic viscosity measurement techniques that can measure viscosity within a short period of time with only a small amount of sample. Some of the microfluidic viscometers operate with special systems (e.g., electro wetting on dielectric [
8], an optical tweezer [
9], and a magnetic field [
10]). However, owing to the complexity of sensors and operating systems, capillary-driven and pressure-driven viscometers have been widely studied.
The capillary-driven viscometer can estimate viscosity by measuring the velocity of a sample fluid flowing inside the capillary channel with a serpentine configuration [
11,
12]. In addition, a viscometer that can measure non-Newtonian fluidic viscosity by measuring the average velocity of a sample fluid decelerating in a capillary channel has been reported [
13]. The device employing this concept is easy to fabricate, and the viscosity measurement is possible with an extremely small amount of sample fluid. However, a capillary flow is very sensitive to surface properties and thus requires very similar surface states for each device in order to guarantee reliable measurement performances. Furthermore, within a given geometry, the measurable shear rate range cannot be actively manipulated.
In contrast to capillary-driven methods, many pressure-driven viscometers that are capable of active shear rate control have been developed. Various approaches exist for measuring the viscosity by means of measuring various mechanical and electrical factors, such as the vibrational noise spectrum [
14], ring-down voltage from the vibrating wire [
15], voltage drop by cantilever deflection [
16], and electrical resistance of the blood flow [
17]. These methods enable an accurate viscosity measurement with a very small amount of sample fluid; nonetheless, they require complex devices and systems. Meanwhile, a method for estimating viscosity by measuring pressure in a micro-channel was developed [
18,
19]. Although it does not require a complicated device configuration, electrodes, as well as a calibration procedure that converts pressure into viscosity, is necessary. For this reason, the method of analyzing the fluidic boundary by using the reference fluid with the known viscosity has the advantage of not requiring an additional electrode. Based on this idea, methods of measuring viscosity by image acquisition and processing of the cross-sectional area [
20] or channel width [
21] at a given flow rate were developed. Meanwhile, another device measures viscosity using the values of a flow rate ratio at a given boundary position [
22]. Another group proposed a method of determining a flow rate ratio at the moment of a reverse flow occurring on account of the hydrodynamic balancing in a junction channel [
23,
24]. Our group developed a viscosity measurement technique using hydraulic compartments [
25,
26], which can measure the viscosity by simply counting the number of channels filled with reference and sample fluids. The above methodologies do not require an electrode or complicated device configurations. Nevertheless, they provide a single viscosity value at a particular shear rate from a given flow rate condition. For the case of viscosity measurements of a non-Newtonian fluid, such as blood, multiple shear rate conditions with respect to the number of viscosity data are crucial to obtain.
Herein, a pressure-driven micro-viscometer that can acquire a shear-varying blood viscosity over a wide range of shear rates is proposed. Unlike previous pressure-driven viscometers, the main feature of the proposed viscometer includes multiple shear rate generation at a fixed flow rate. This is realized by an optimal design of the multiple microchannel arrays in the viscometer. Since it obtains 10-fold more data points of viscosity at a given flow rate condition, this feature is highly beneficial, especially for measuring the shear-varying viscosity of a non-Newtonian fluid like blood. The functionality of this viscometer is demonstrated by experimental demonstration as well as numerical simulation, and is compared to a standard rotational viscometer.
2. Materials and Methods
2.1. Numerical Simulation
A numerical simulation was performed using COMSOL Multiphysics (COMSOL Inc., Burlington, MA, USA) to verify the performance of the proposed micro-viscometer. In this simulation, the incompressible laminar flow was assumed because it is a microscale phenomenon. The Laminar Two-Phase Flow—Phase Field module was exploited in order to simulate the Newtonian (reference) and non-Newtonian (sample) fluids flowing together in the viscometer. The boundary condition for the inlet was set to mass flow since the fluids are infused at a specific flow rate by a syringe pump. The outlet of the device was in an open state, thus it was set to zero pressure. Also, the channel walls had a no-slip condition. The properties and conditions of the reference and sample fluids used in the simulation are summarized in
Table 1. It is notable that the sample fluid viscosity was expressed by the power law model, which is a general method for describing a shear-varying viscosity by using two parameters (flow consistency index k, and flow behavior index n). These parameters were acquired for a comparison with the result from the viscosity measurements by using a rotational viscometer known to be the “gold standard” for measuring viscosity. As an initial condition, the reference and sample fluids were symmetrically filled in their respective halves of the device according to the initial interface located at the center of the device. For the time-dependent solution, PARDISO solver was utilized from 0 to 1000 s with a time interval of 10 s. The tolerance was set to be 5 × 10
−4.
2.2. Fabrication of the Micro-Viscometer
The micro-viscometer mold was fabricated using a conventional photolithography technique by spin-coating negative photoresist (SU-8 2025, MicroChem, Westborough, MA, USA) with the height of 50 μm on a silicon wafer. A polydimethylsiloxane (PDMS; Sylgard 184 A/B, Dow Corning, Seoul, Korea) replica was prepared from the SU-8 mold using a typical soft lithography technique. From that point, the PDMS replica and glass slide were irreversibly bonded via oxygen plasma treatment (COVANCE, Femto Science, Yongin, Korea). The fabricated viscometer had two inlets for injection of the reference and sample fluids, as well as an open-state outlet.
2.3. Experimental Setup
The rotational viscometer (HAAKE MARS II, Thermo Scientific, Waltham, MA, USA), which is known to be a gold standard for viscosity measurements, was used to obtain the reference data for evaluating the measurement accuracy of results from both the numerical and experimental analyses. Twenty sets of viscosity in the shear rate condition of 10–1000/s were obtained from the rotational viscometer. The two indices from the power-law model (k and n) were acquired using regression analysis.
Newtonian and non-Newtonian fluids were used for the experimental demonstration. For the Newtonian fluid, 1% (v/v) fluorescent particle (0.3 μm in diameter) suspension in DI water was used as a reference fluid and DI water mixed with 8% Sodium Dodecyl Sulphate (SDS) was used as a sample fluid. For the non-Newtonian fluid, Phosphate Buffered Saline (PBS; pH 7.4, Gibco, Invitrogen, Carlsbad, CA, USA) was used as a reference fluid and the red blood cell suspension in PBS was used as a sample fluid. The packed red blood cells employed for the sample fluid were supplied by Gwangju Chonnam blood bank branch of the Korean Red Cross for research purposes only. Its use was approved by the Institutional Review Board at Gwangju Institute of Science and Technology (20160328-BR-22-03-31). In the sample preparation step, the packed red blood cells obtained from the blood bank were washed by mixing with PBS and centrifuging at 3500 RPM for 5 min. After centrifugation, PBS and supernatant cells were discarded. This consecutive step was conducted twice in order to completely remove the media containing the packed red blood cells. Finally, the remaining red blood cells were mixed with PBS. The volume of the red blood cells and PBS varied according to the hematocrit.
In the experiment, a microscope (BX51, Olympus, Tokyo, Japan) equipped with a charge-coupled device (CCD) camera (DP72, Olympus, Tokyo, Japan) and a 1.25x objective lens (MPLFN 1.25X, Olympus, Tokyo, Japan) was used to count the number of channels filled with each fluid. Two syringe pump modules (neMESYS, CETONI GmbH, Korbußen, Germany) were used to inject the reference and sample fluids.
2.4. Viscosity Measurement of the Micro-Viscometer
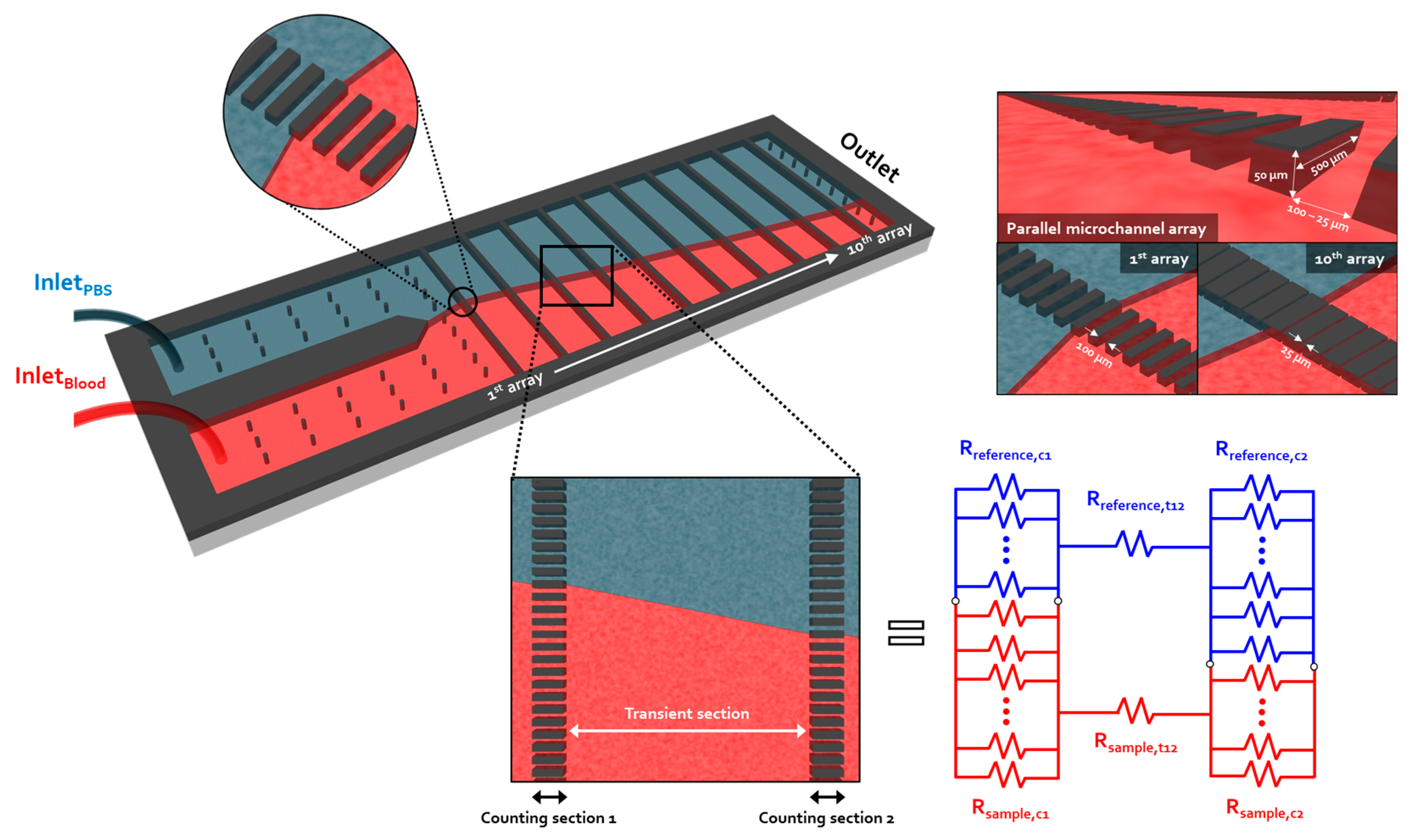
As shown in
Figure 1, the viscometer proposed in this study consists of 10 microchannel arrays connected in series at regular intervals. Each array has 100 identical micro-channels. Instead of a radial-shaped device configuration, as in our previously reported viscometer [
26], a straight shape was selected since it can reduce the volume of the sample required for the viscosity measurements. In the proposed viscometer, the microchannel array where the viscosity measurement is performed is defined as a counting section. An interval connecting two adjacent arrays is defined as a transient section. Considering that the shear rate is a function of the channel width, each counting section has a different channel width for generating various shear rates at a given flow rate condition (
Figure 1). Meanwhile, the transient section has a specific distance between two adjacent counting sections for independently implementing the viscosity measurements.
The approach to measuring the viscosity in the counting section is the same as that described for our previously developed viscometer [
26]. In
Figure 1, the counting and transient sections filled with reference and sample fluids can be expressed as an electrical circuitry through lumped parameter modeling. The hydraulic resistance of the counting section filled with the two fluids is as follows:
In the micro-viscometer, a micro-channel array forming a different shear rate is defined as a counting section, and a transient section is defined as a section between two adjacent counting sections. According to the lumped parameter modeling, the counting and transient sections where each fluid flows together can be expressed as the hydrodynamic circuitry with hydraulic resistances. Since the hydraulic resistance is a function of geometrical factors and viscosity, the viscosity of the sample fluid can be calculated by comparing the two hydraulic resistances:
where subscripts
r and
s denote the respective reference and sample fluids. In addition,
R,
w,
h,
L, and
μ,
N respectively represent the hydraulic resistance, channel width, height, length, viscosity, and number of channels filled with the fluid. Since the pressure drops from the point where both fluids begin to pass through to the outlet are the same, Poiseuille flow equations for each fluid are described as:
where Δ
P and
Q denote the pressure gradient and input flow rate. Since the two fluids flow in the same geometry of the micro-viscometer, the geometrical factors are the same. Then, Equations (1) and (2) can be combined to obtain a simplified version of the equation:
Here, Nr and Ns are the number of channels respectively filled with the reference and sample fluids in the counting section. Thus, because the viscosity of the reference fluid (μr) is already a known value, it is possible to predict the viscosity of the sample fluid (μs) by determining the input flow rates of each fluid and the number of fluid-filled channels.
Meanwhile, the micro-viscometer has 10 counting sections with different channel widths because the shear rate (
) is a function of the channel width, as described in Equation (6) [
26].
Instead of changing the input flow rates, as in previous viscometers, the proposed micro-viscometer has a varying channel width in each counting section, which generates multiple shear rate conditions from a given flow rate.
2.5. Determination of the Optimal Flow Rate Ratio
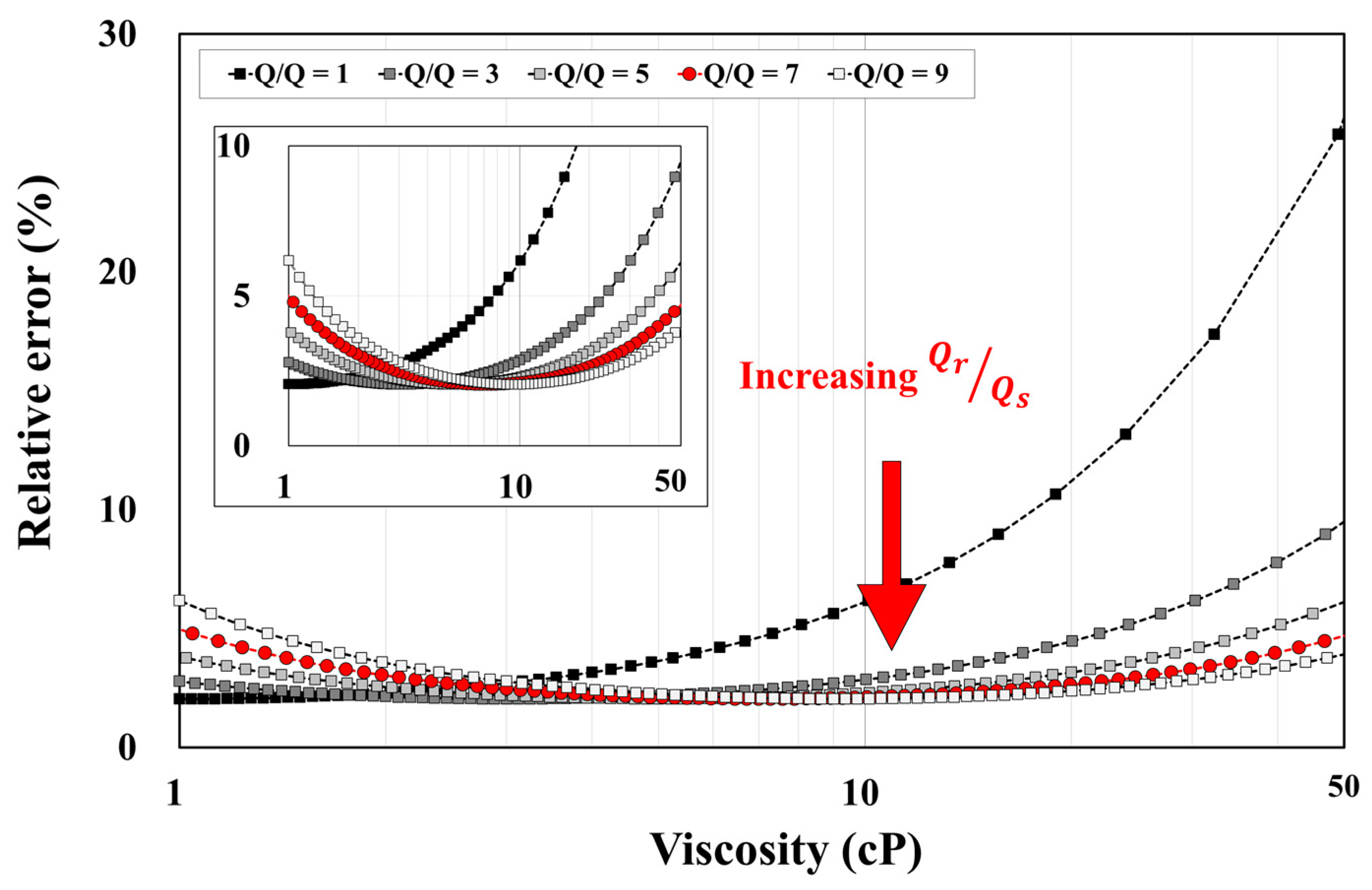
For accurate viscosity measurements, the input flow rates of the reference and sample fluids should be considered because the flow rate ratio determines the number of channels for two fluids. In an ideal situation, the number of channels does not affect the measurement accuracy. In reality, however, a channel may be mistakenly counted due to a practical issue, such as fluidic fluctuation. In particular, if the number of channels for the reference fluid (Nr), a denominator in Equation (5), is too small, then a change in a single channel with the reference fluid will have a large influence on the viscosity measurement. In other words, as the number of reference fluid channels increases, a reliable viscosity measurement becomes possible. In the presented micro-viscometer, therefore, a higher PBS to blood flow rate ratio is chosen in order to increase the number of channels occupied by a reference fluid (PBS).
The graph in
Figure 2 shows the theoretical calculation of the relative error for the case when a single PBS channel is mistakenly counted. The flow rate ratio is increased from one to nine. First, when the flow rate ratio is one, the relative error increases with respect to the viscosity to be measured. For the viscosity seven, the maximum relative error is 5% for the viscosity range of 1–50 cP. In this study, the input flow rate of the reference fluid is set to be seven-fold higher than the sample fluid.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}