1. Introduction
With the practical advantages of small size, light weight, multiplexing capability, and resistance to electromagnetic interference (EMI) [
1], fiber Bragg grating (FBG) has received considerable interest in the application of mechanical monitoring [
2,
3,
4]. However, high-frequency vibration, a key parameter of mechanical monitoring, can hardly be measured with FBG, as the FBG demodulation speed which is commonly below a few kHz in conventional demodulation technologies such as grating matching [
5,
6], charge-coupled device (CCD) array [
7], and tunable Fabry-Pérot (F-P) filter [
8].
Focused on dynamic detection requirements for high frequency signal, some new demodulation methods have been proposed; a fast FBG sensor system using the Fourier domain mode-locked (FDML) swept laser [
9,
10] was developed to realize a 60 kHz demodulation speed. However, FDML swept laser is complex, expensive, and instable, which limits its adoption for practical applications. Our research team proposed a 100 kHz differential demodulation method based on dispersion compensation fiber and single mode fiber [
11]. However, in order to achieve this performance, an ultra-high-speed oscillator with 80 GHz sampling rate is needed, whose cost exceeds the budget of most sensing applications.
In previous work, we demonstrated a high-speed FBG integrated demodulation system based on a distributed feedback (DFB) laser [
12]. With a high speed current-modulated DFB laser and a Field Programmable Gate Array (FPGA) real-time data processing circuit, a demodulation speed of 100 kHz was achieved. It is considered as a promising demodulation method in engineering applications for its simple structure, low cost, high reliability, and real-time response. However, the spectral scanning range of the current modulation is only 1 nm, which seriously restricts its capacity and dynamic demodulation range.
In this paper, we combined the high-speed sensing system with identical weak FBG array, whose wavelength change is typically less than 1 nm. We also designed a waveform repair algorithm to estimate the Bragg wavelength of an FBG whose reflection spectrum is only partially detected, and hence broadens the dynamic demodulation range of the FBG sensors. The experimental setup succeeded in demodulating multiple weak FBG sensors at 100 kHz.
2. Experimental Setup and Principle
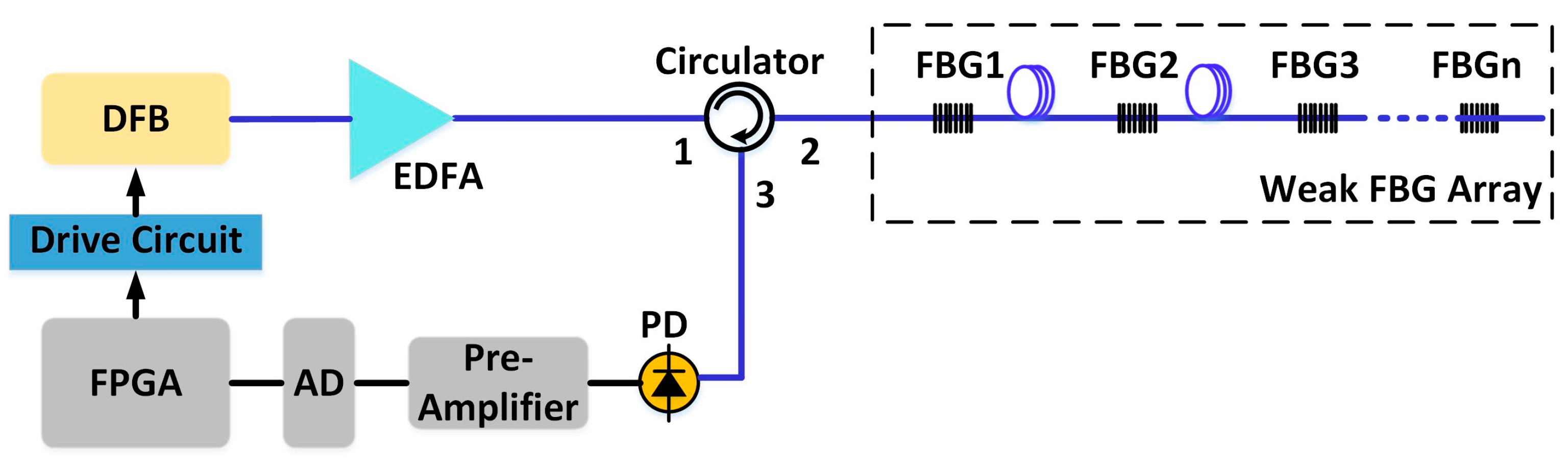
The schematic diagram of the interrogation system is shown in
Figure 1. The DFB laser with a 20 mA threshold is driven by a 100 kHz 20–150 mA sawtooth wave current. The current tuning coefficient of the DFB laser is about 8 pm/mA, then the wavelength scanning range is over 1 nm.
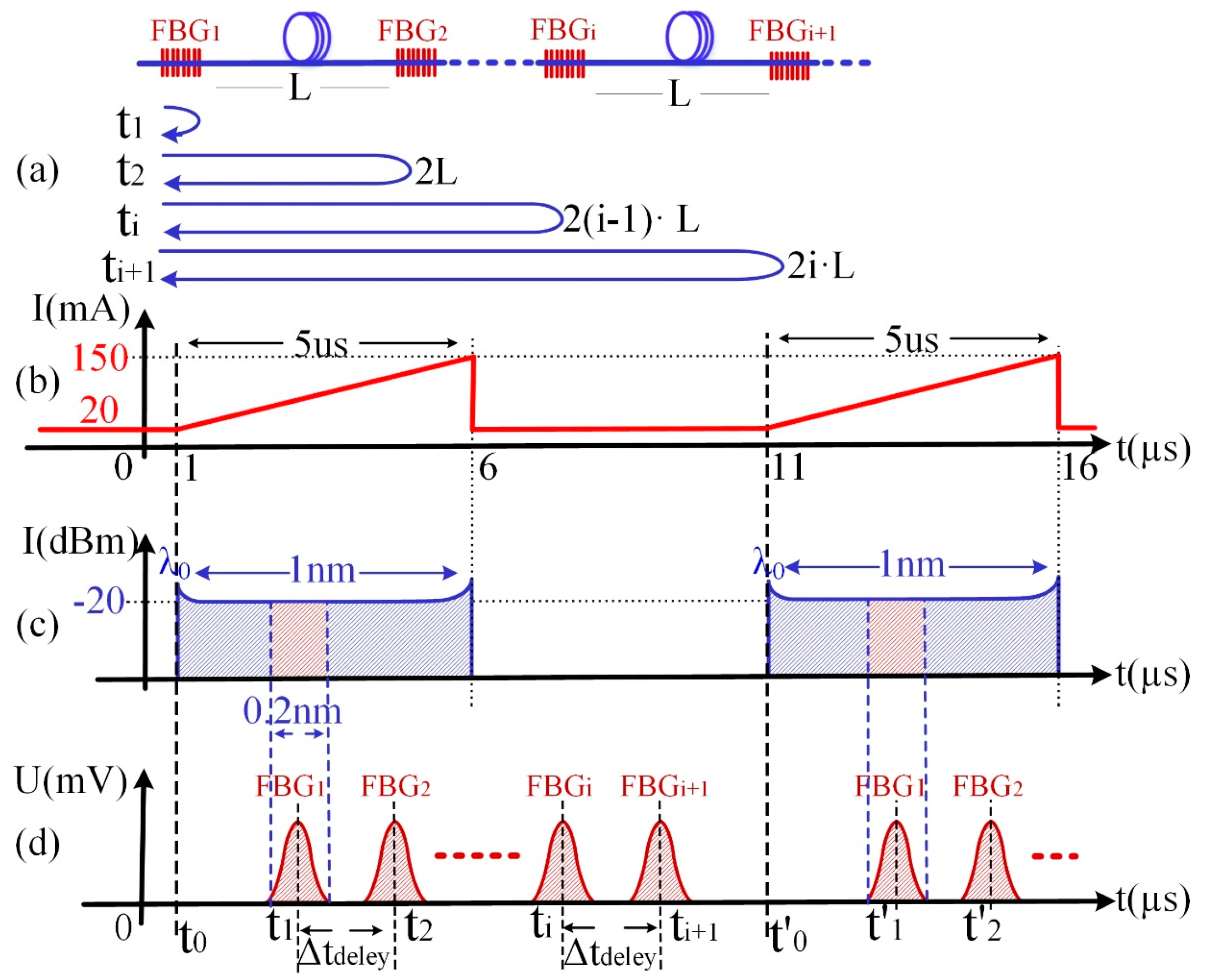
After being amplified by an erbium-doped fiber amplifier (EDFA), the swept laser pulses illuminate the identical weak FBG array through an optical circulator. Each grating reflects part of the light (i.e., red region in
Figure 2c), and all the reflected light passes the same circulator and is received by a photodetector (PD). Signals from different gratings are separated in the time domain on account of the high scanning speed of the laser and the transmission delay among the gratings, as sketched in
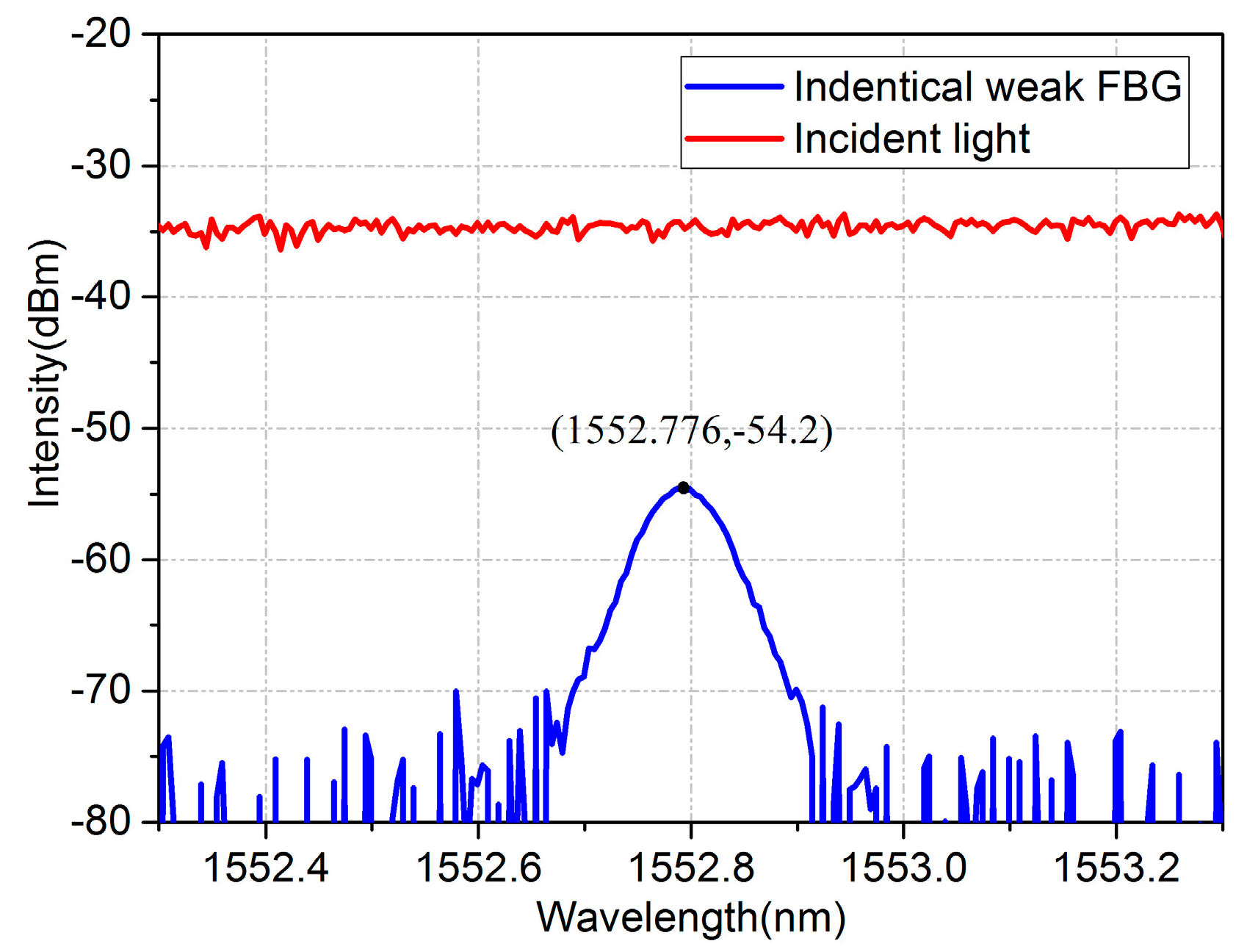
Figure 2d. Pre-amplifier, analog-to-digital converter (ADC), and FPGA are used to amplify, sample, and process the serial data from the PD, respectively. A typical spectrum of the weak FBG is shown as
Figure 3. The peak reflected intensity from the weak FBG is about −54.2 dBm under −34 dBm incident light. Therefore, the reflectivity of the weak FBG is only 1%, and the reflection spectra of all FBGs have similar 3-dB bandwidths of about 200 pm. Meanwhile, the wavelength difference in the weak FBG array has been controlled within 50 pm in the practical system. Therefore, it will avoid the disunity of the demodulation on the sensing array because when the spectra of identical FBGs move to the margin of the demodulation range, some FBGs with excessive wavelength difference might have already moved out, causing the disunity of the demodulation on the sensing array.
The distance between two neighboring gratings, namely FBG
i (
i = 1, 2,…,
n) and FBG
i+1, is fixed as the spatial resolution
L. As shown in
Figure 2a, the time delay Δ
tdelay between
ti and
ti+1 can be calculated as:
where
c represents the light speed in the vacuum, and
neff is the effective refractive index of the single mode optical fiber. Meanwhile, the wavelength-to-time mapping is realized in the optical domain by using a DFB laser that has a fast wavelength scanning speed. Therefore, the reflected spectrum of every FBG is transferred to a temporal waveform and separated with an interval of Δ
tdelay in the time domain. The center wavelength of the FBG reflected spectrum can be calculated by the following equation:
where
Vs (nm/s) is the wavelength scanning speed of DFB, and
λ0 is the initial wavelength at the beginning of the scanning. Nevertheless, the non-linear problem of the DFB wavelength-swept laser would change the
Vs which will influence the accuracy of the wavelength results. Therefore, we have calibrated and calculated the wavelength-swept speed in a segmented manner to reduce the negative influence from the sweep nonlinearity [
12].
Besides, in order to fully distinguish all FBGs’ spectra in the time domain, and to avoid the waveform overlap of the respective 200-pm, 3-dB bandwidths, a spatial interval L of 100 m is set in the current system to ensure the sufficient Δtdelay. Since the wavelength inconsistency from FBGs will also affect the spatial interval, it might require a larger space interval to avoid the waveforms overlap for the FBG fabrication uncertainty. Thus, the wavelength differences of FBGs are controlled within 50 pm in the current system.
Therefore, in this distributed identical weak FBG sensing system, the wavelength information of all the FBGs can be distinguished and acquired at a high repetition rate.
3. Incomplete Waveform Repair Algorithm
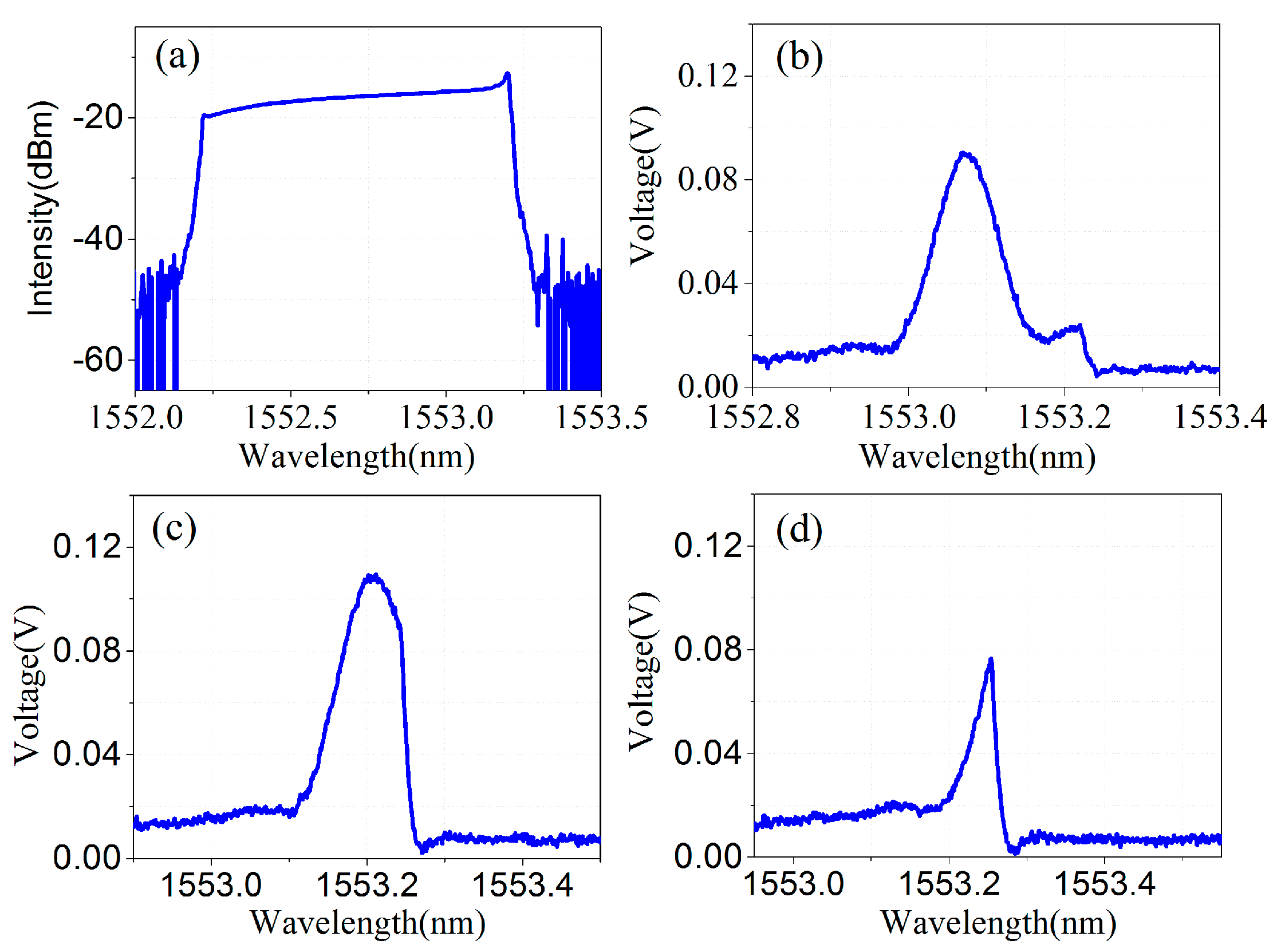
As shown in
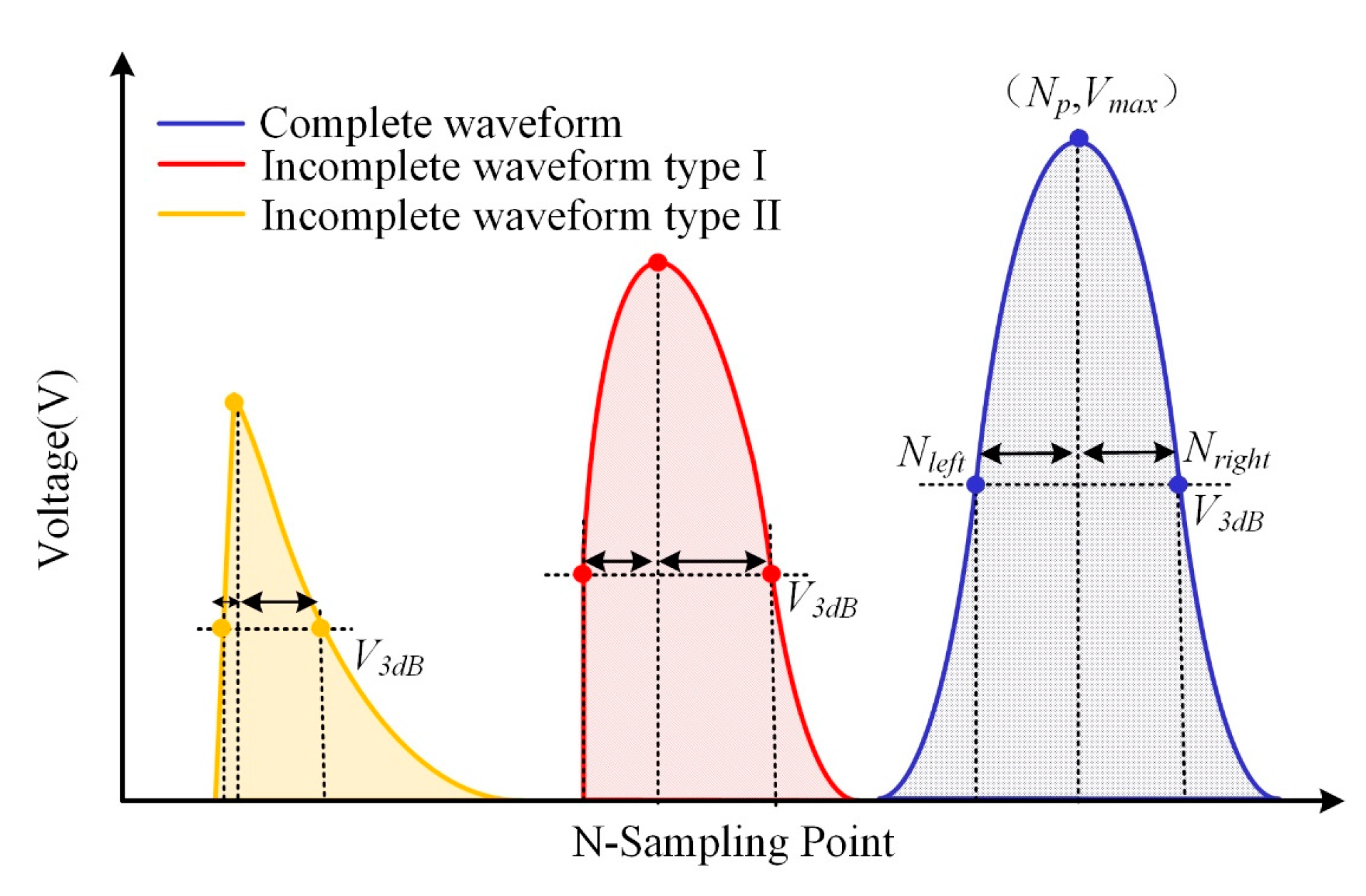
Figure 4a, the swept DFB laser has a limited scanning range of 1 nm. In practice, three types of reflected waveforms of FBGs would be obtained: complete waveform, incomplete waveform type I, and incomplete waveform type II, as sketched in
Figure 4b–d. In incomplete waveform type I, a small portion of the reflection spectrum of the FBG is out of the laser's scanning range, while the reflection peak remains in the range. In incomplete waveform type II, a large portion of the reflection spectrum including the reflection peak is out of the scanning range. The reflected wavelength of these incomplete waveforms cannot be demodulated by an ordinary Gaussian curve-fitting algorithm [
13]. Therefore, in our original demodulation system, considering that the adopted FBG has 200-pm, 3-dB bandwidths and that the incomplete waveform will appear symmetrically in the scanning range of 1 nm, the incomplete waveform type II occupied nearly a 200-pm wavelength range, leaving only an 800-pm dynamic demodulation range left. An efficient incomplete waveform repairing algorithm is proposed in this section.
The incomplete waveform repairing algorithm is based on FBG waveform characteristics, such that its spectral shape
U(
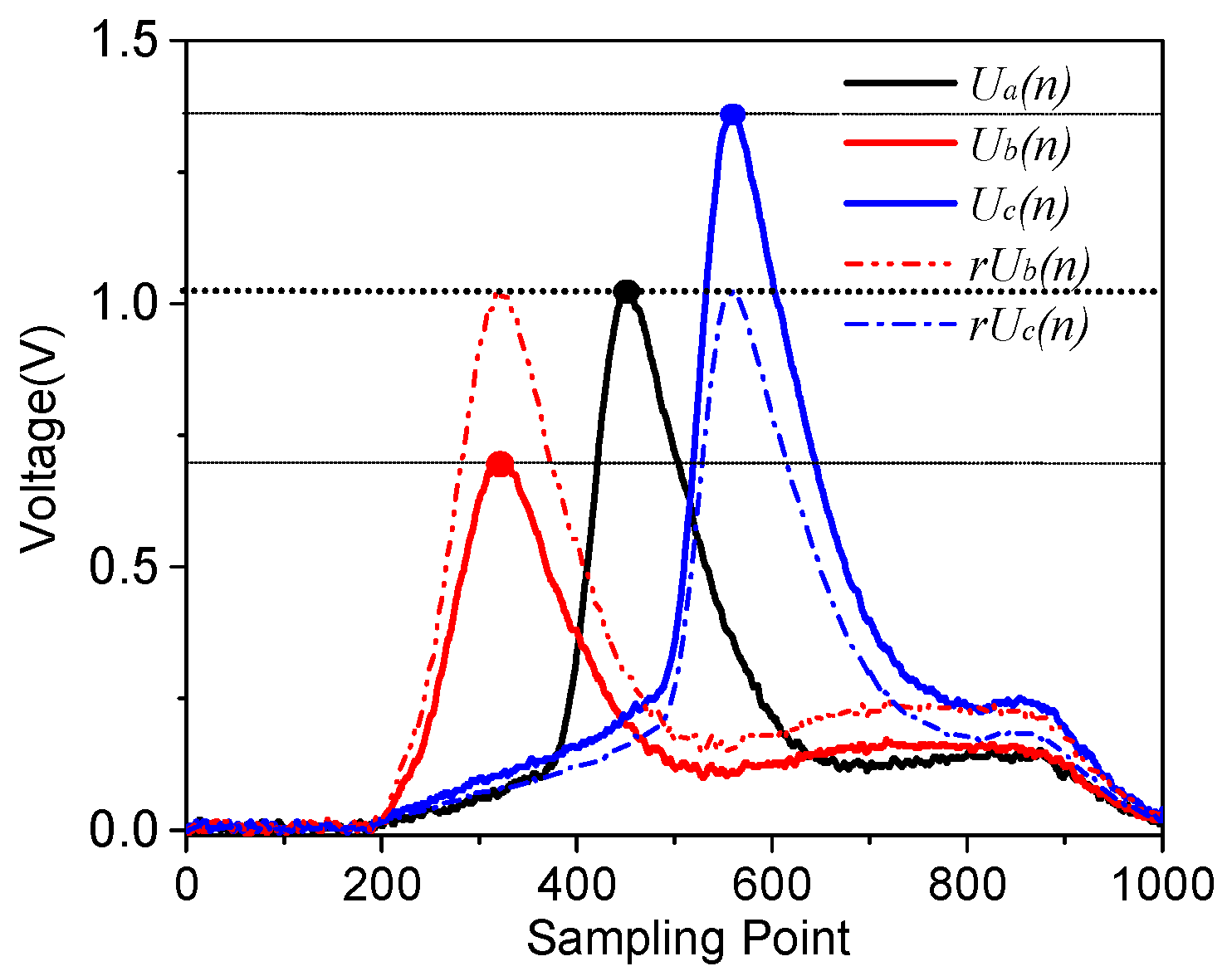
n) acquired by the system does not change, but the amplitude of the received waveform will be a little bit different, which is caused by the non-flat-intensity of the wavelength-swept light source and the transmission loss disturbance in the FBG sensor network. As shown in
Figure 5, the system has acquired the waveforms of one FBG with wavelength shift, and their peak count is found as a, b, c. It can be seen that their waveforms
Ua(
n),
Ub(
n),
Uc(
n) have different amplitudes.
Their similarities are calculated as follows:
Their similarities are more than 97%, which means that their original waveform Ub(n), Uc(n) could be reconstructed under a normalization process by the feature points and the reference waveform Ua(n). Therefore, based on this principle, the incomplete waveform can be repaired by a complete waveform as well. The processing procedures are as following:
First, at the initial stage, a waveform type identification based on the waveform symmetry principle is designed to judge the types of waveform. As illustrated in
Figure 6, the maximum intensity point of the waveform is marked as (
Np,
Vmax), and two points of
V3dB are denoted as (
Nleft,
V3dB) and (
Nright,
V3dB). Then the symmetry distortion ratio
Rsd is obtained:
It can be seen that, with the gradual loss of the wavelength data, the symmetry distortion ratio increases. Therefore, according to the calibrated range of the value of Rsd, we can judge the type of the waveforms to be an complete waveform, incomplete waveform type I, or incomplete waveform type II.
Secondly, we store one complete waveform data for its respective FBG as a reference waveform Ur(n) to do the normalization. For incomplete waveform type I, it still has its peak point which can be set as the feature point. Therefore, it is simpler to do the normalization processing from the Ur(n) based on the coordinate difference of their peak points.
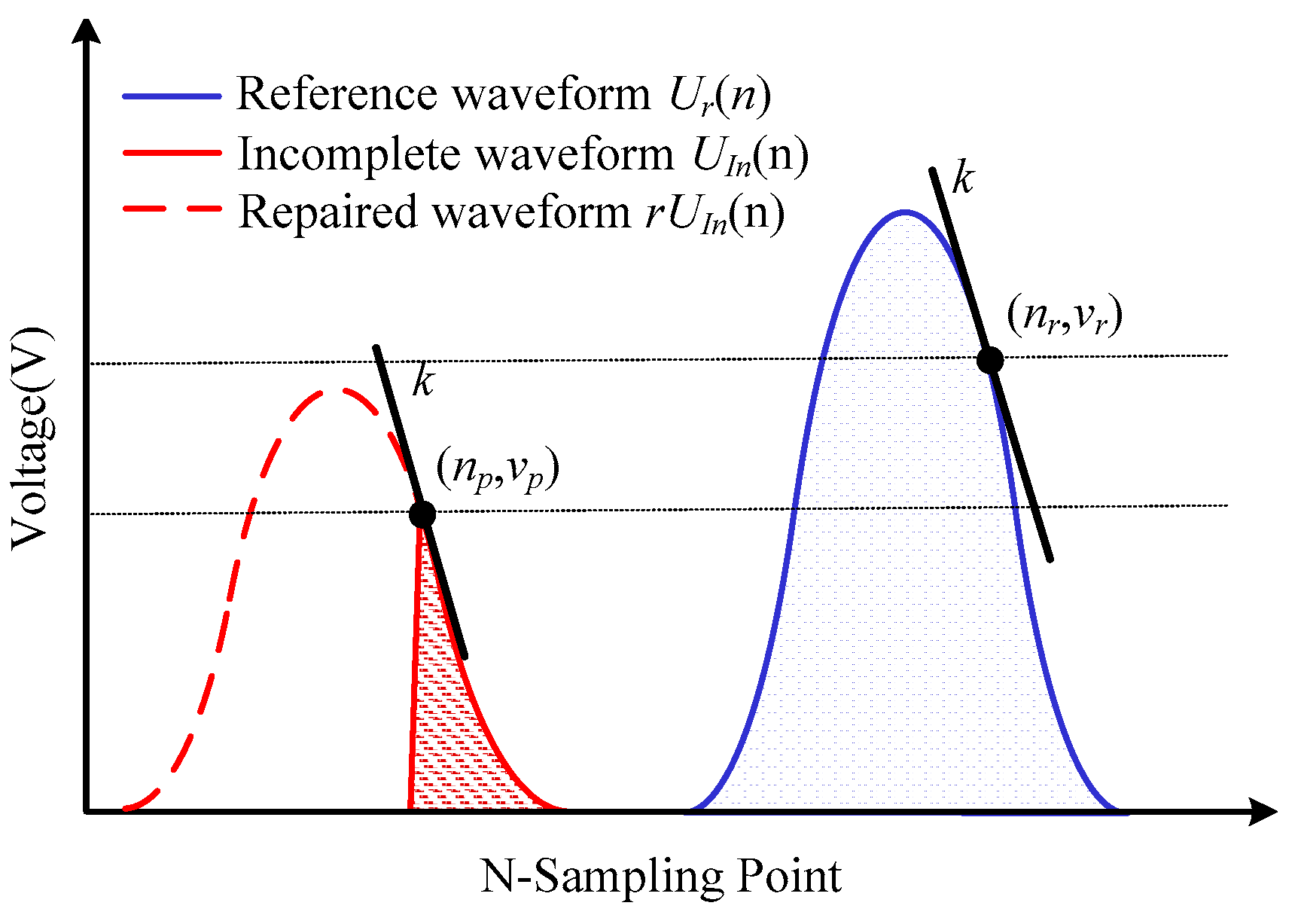
For incomplete waveform type II, as showed in
Figure 7, we set the peak point (
np,
vp) of the acquired incomplete waveform
UIn(
n) as the feature point. Based on the effective waveform data near this peak point, we could calculate the slope k at this position of the incomplete waveform. However, type II has already lost its real peak point and k is no longer zero, which makes it more complex to figure out the corresponding feature point with the same change rate on
Ur(
n).
Therefore, a rapid way is proposed to solve this problem, in which we simplify the reference waveform
Ur(
n) to Gaussian function
Ugr(
n) in an approximate way:
where,
Vmax,
Np and
Nleft −
Nright have already been acquired in the waveform type identification method. Through this Gaussian function
Ugr(
n), we carry out a fast derivative operation of
U′gr(
n) and
U″gr(
n) to figure out the only feature point (
nr,
vr) with the same slope k. After acquiring the feature points (
np,
vp) and (
nr,
vr), as depicted in
Figure 7, a normalization process by the stored reference waveform
Ur(
n) can be conducted to acquire the repaired waveform
rUIn(
n):
At last, the system will calculate the similarity of the
rUIn(
n) and
UIn(
n). If the similarity of the overlapping part reaches 97%, a Gaussian peak-seek algorithm [
13] will be used to demodulate the center wavelength of the repaired waveform for higher accuracy. When the overlapping part is lower than 97% or the spectrum completely moves out of the detection bandwidth, the waveform cannot be repaired. In order to reduce the occurrence of this situation in practical engineering applications, the working temperature of the DFB laser can be adjusted to match the scanning wavelength center with the wavelength of the FBGs to reserve enough dynamic range.
Moreover, this repairing algorithm is universal for both incomplete waveform type I and type II, and it suggests a very efficient way to realize in our FPGA system, which makes the FBG waveform repairing possible to expand the dynamic demodulation range in practical engineering applications.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









