A Novel Range Compression Algorithm for Resolution Enhancement in GNSS-SARs

Abstract
:1. Introduction
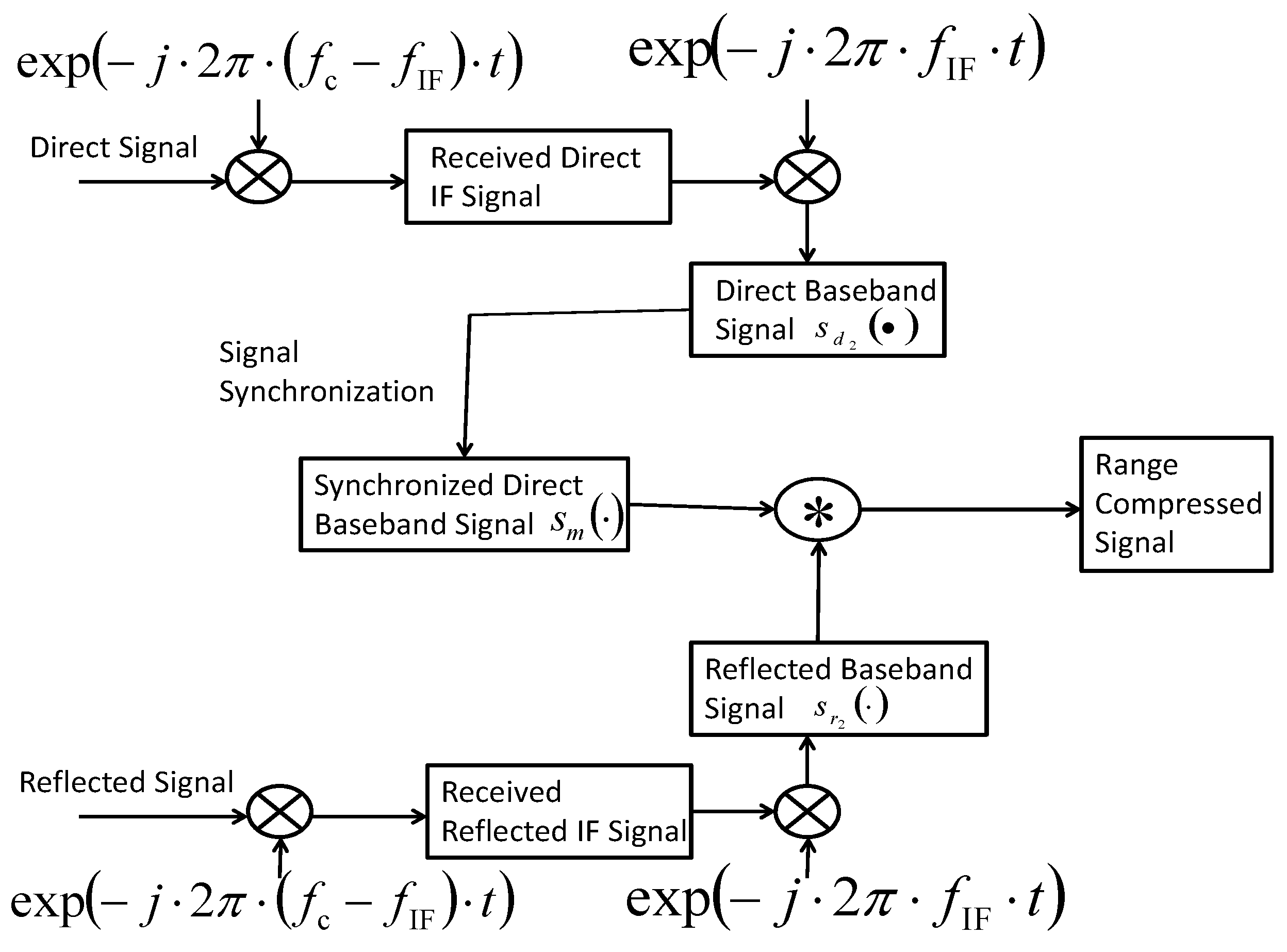
2. Resolution of the Conventional Range Compression Algorithm
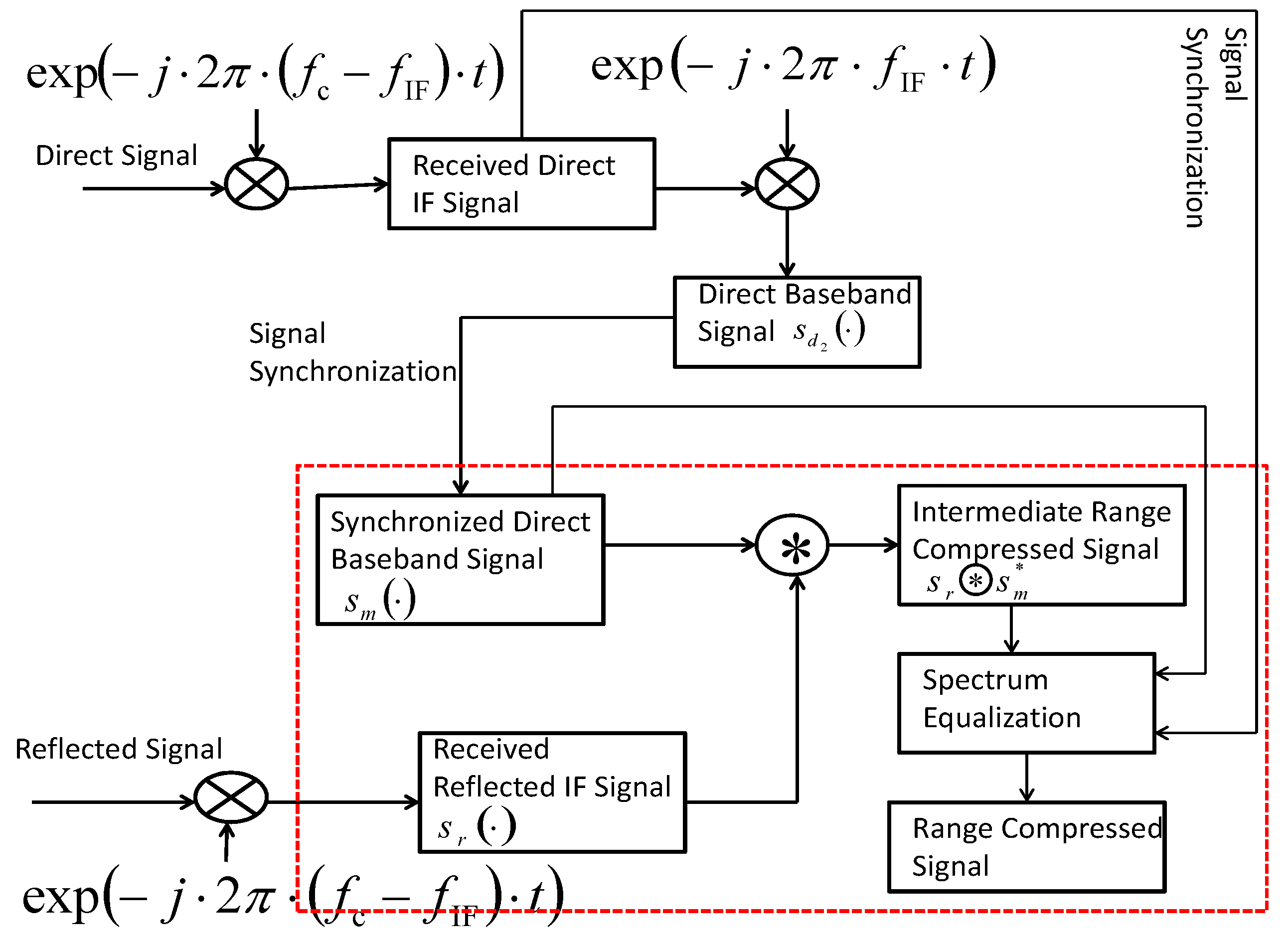
3. Resolution of the Proposed Range Compression Algorithm
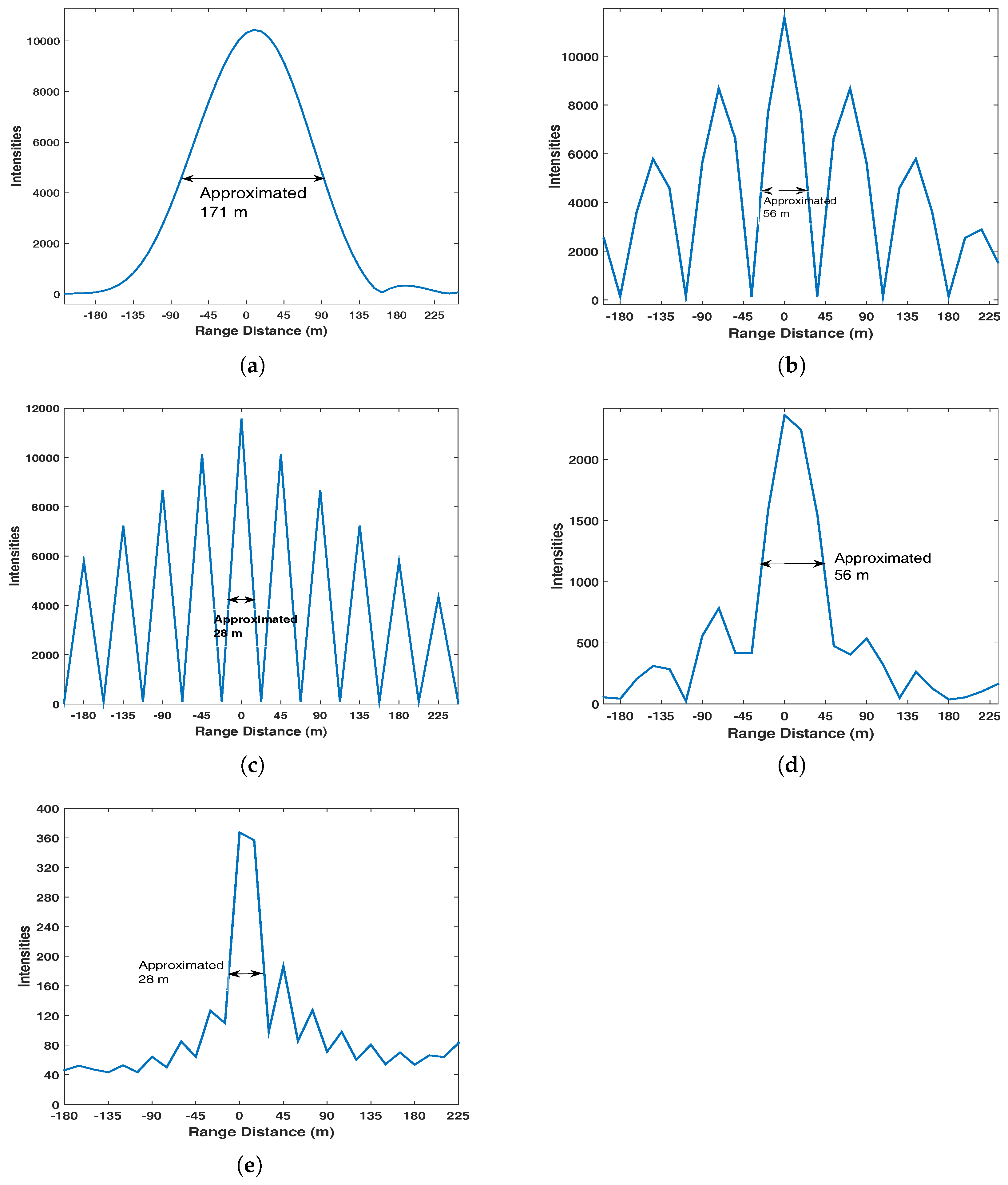
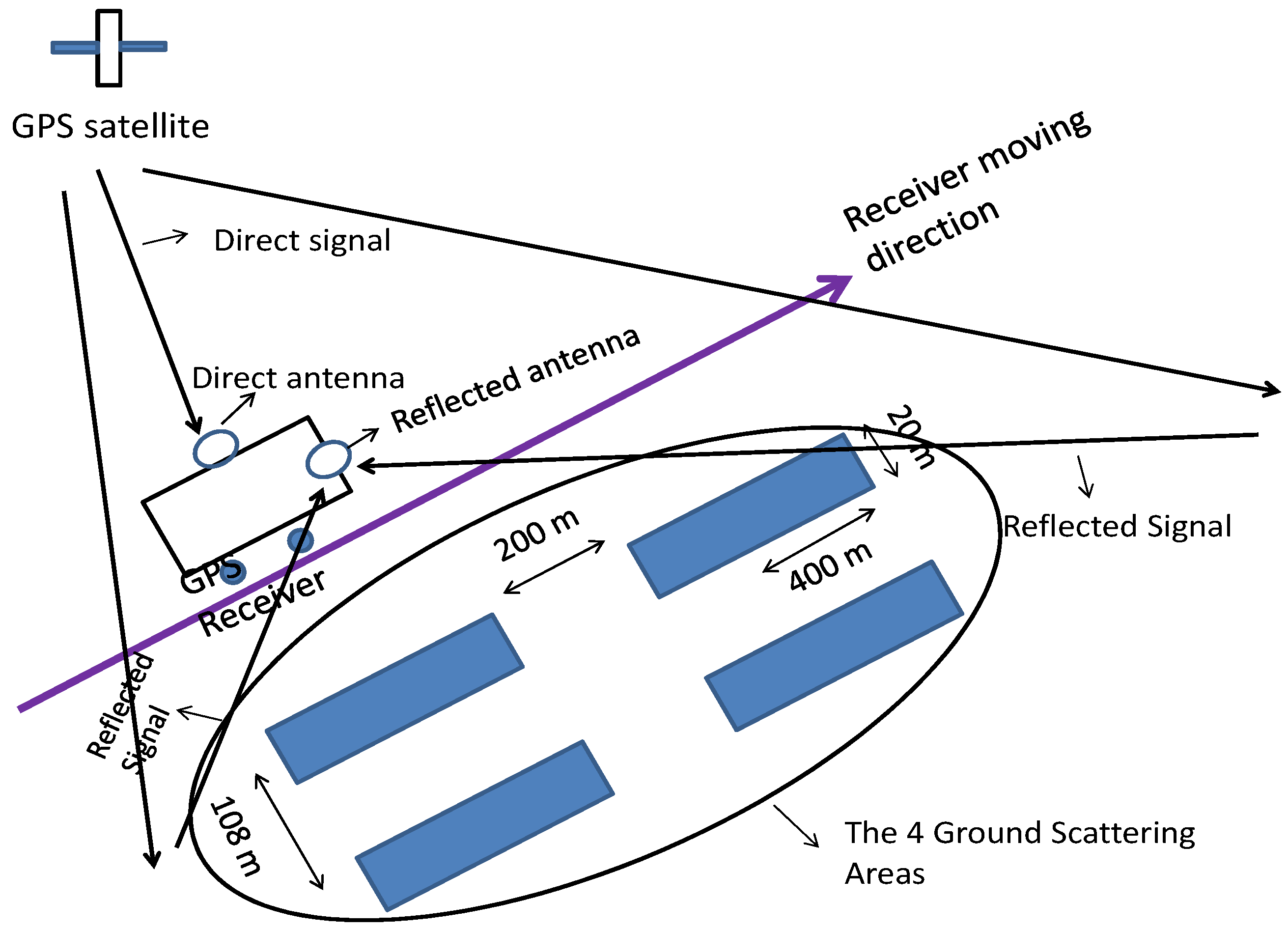
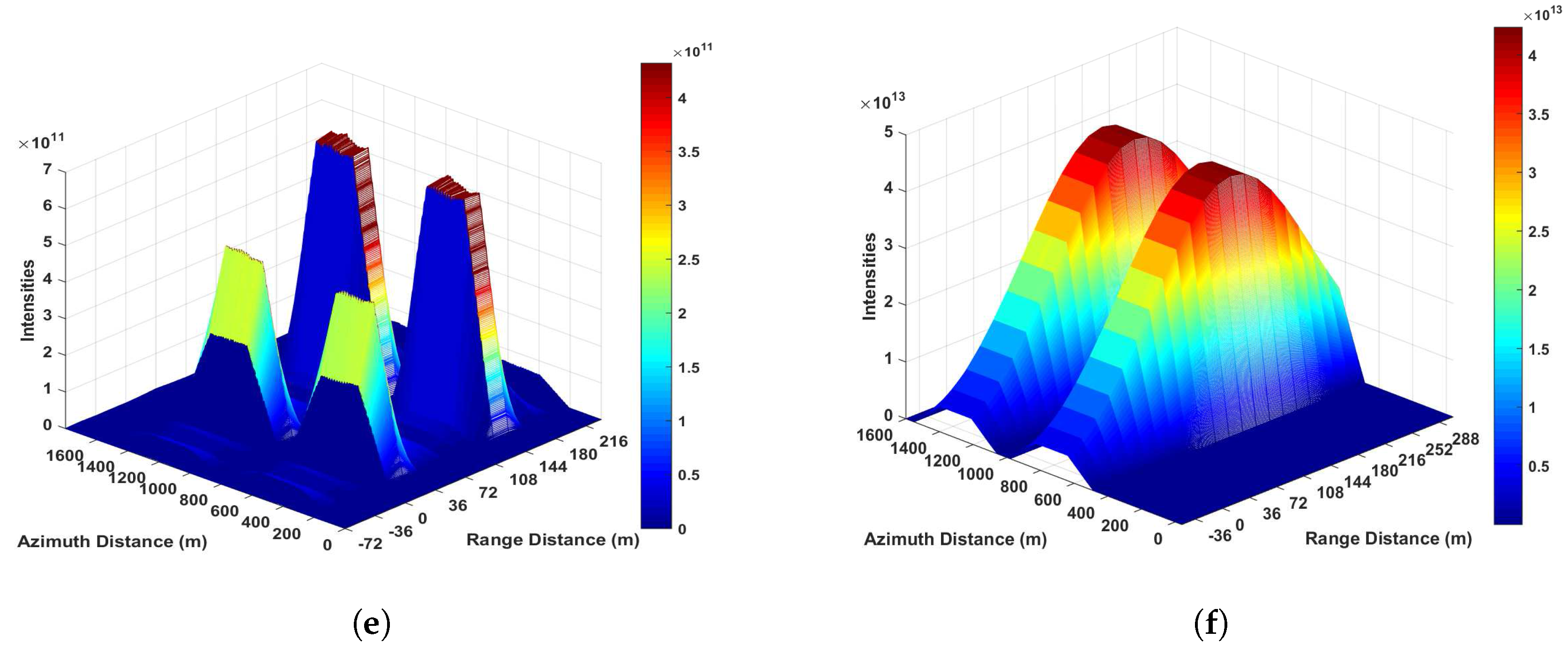
4. The Simulation Experiment
5. Discussion
5.1. Discussion on the Associated Issues
5.2. Future Development
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| GNSS | Global Navigation Satellite System |
| GPS | global positioning system |
| SAR | Synthetic Aperture Radar |
| IF | intermediate frequency |
| SNR | signal to noise ratio |
| C/A code | Coarse Acquisition Code |
| P code | Encrypted Precision Code |
| EIRP | equivalent isotropically radiated power |
| PRN | pseudo-random noise |
References
- Zuo, R. Bistatic Synthetic Aperture Radar Using GNSS as Transmitters of Opportunity. Ph.D. Thesis, University of Birmingham, Birmingham, UK, 2012. [Google Scholar]
- Zeng, Z. Passive Bistatic SAR with GNSS Transmitter and a Stationary Receiver. Ph.D. Thesis, University of Birmingham, Birmingham, UK, 2013. [Google Scholar]
- Santi, F.; Antoniou, M.; Pastina, D. Point spread function analysis for GNSS-based multistatic SAR. IEEE Geosci. Remote Sens. Lett. 2015, 12, 304–308. [Google Scholar] [CrossRef]
- Zeng, T.; Zhang, T.; Tian, W.; Hu, C. Space-Surface Bistatic SAR Image Enhancement Based on Repeat-Pass Coherent Fusion With Beidou-2/Compass-2 as Illuminators. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1832–1836. [Google Scholar] [CrossRef]
- Santi, F.; Bucciarelli, M.; Pastina, D.; Antoniou, M.; Cherniakov, M. Spatial resolution improvement in GNSS-Based SAR using multistatic acquisitions and feature extraction. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6217–6231. [Google Scholar] [CrossRef]
- Daout, F.; Schmitt, F.; Ginolhac, G.; Fargette, P. Multistatic and multiple frequency imaging resolution analysis-application to GPS-based multistatic radar. IEEE Trans. Aerosp. Electr. Syst. 2012, 48, 3042–3057. [Google Scholar] [CrossRef]
- Mikawa, Y.; Ebinuma, T.; Nakasuka, S. The study of the remote-sensing application using the GNSS reflected signal with the aperture synthesis. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 400–403. [Google Scholar]
- Ebinuma, T.; Mikawa, Y.; Nakasuka, S. Quasi-monostatic algorithm for GNSS-SAR. In Proceedings of the 2013 IEEE Asia-Pacific Conference on InSynthetic Aperture Radar (APSAR), Tsukuba, Japan, 23–27 September 2013; pp. 164–166. [Google Scholar]
- Lazarov, A.; Chen, V.C.; Kostadinov, T.; Morgado, J.P. Bistatic SAR system with GPS transmitter. In Proceedings of the 2013 IEEE Radar Conference (RADAR), Ottawa, ON, Canada, 29 April–3 May 2013; pp. 1–6. [Google Scholar]
- Antoniou, M.; Zeng, Z.; Feifeng, L.; Cherniakov, M. Experimental demonstration of passive BSAR imaging using navigation satellites and a fixed receiver. IEEE Geosci. Remote Sens. Lett. 2012, 9, 477–481. [Google Scholar] [CrossRef]
- Antoniou, M.; Hong, Z.; Zhangfan, Z.; Zuo, R.; Zhang, Q.; Cherniakov, M. Passive bistatic synthetic aperture radar imaging with Galileo transmitters and a moving receiver: Experimental demonstration. IET Radar Sonar Navig. 2013, 7, 985–993. [Google Scholar] [CrossRef]
- Antoniou, M.; Cherniakov, M. GNSS-based bistatic SAR: A signal processing view. EURASIP J. Adv. Signal Process. 2013, 2013, 98. [Google Scholar] [CrossRef]
- Santi, F.; Pastina, D.; Bucciarelli, M.; Antoniou, M.; Tzagkas, D.; Cherniakov, M. Passive multistatic SAR with GNSS transmitters: Preliminary experimental study. In Proceedings of the 2014 11th European Radar Conference (EuRAD), Rome, Italy, 8–10 October 2014; pp. 129–132. [Google Scholar]
- Ma, H.; Antoniou, M.; Cherniakov, M. Passive GNSS-Based SAR Resolution Improvement Using Joint Galileo E5 Signals. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1640–1644. [Google Scholar] [CrossRef]
- Ma, H.; Antoniou, M.; Cherniakov, M. Passive GNSS-based SAR imaging and opportunities using Galileo E5 signals. Sci. China Inf. Sci. 2015, 58, 1–11. [Google Scholar] [CrossRef]
- Zeng, H.C.; Wang, P.B.; Chen, J.; Liu, W.; Ge, L.; Yang, W. A Novel General Imaging Formation Algorithm for GNSS-Based Bistatic SAR. Sensors 2016, 16, 294. [Google Scholar] [CrossRef] [PubMed]
- Shi, S.; Liu, J.; Li, T.; Tian, W. Basic performance of space-surface bistatic SAR using BeiDou satellites as transmitters of opportunity. GPS Solut. 2017, 21, 727–737. [Google Scholar] [CrossRef]
- Bandwidth Extension. Available online: https://en.wikipedia.org/wiki/Bandwidth_extension (accessed on 6 June 2017).
- Ghaemi, H.; Galletti, M.; Boerner, T.; Gekat, F.; Viberg, M. CLEAN technique in strip-map SAR for high-quality imaging. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2009; pp. 1–7. [Google Scholar]
- Santi, F.; Bucciarelli, M.; Pastina, D.; Antoniou, M. CLEAN technique for passive bistatic and multistatic SAR with GNSS transmitters. In Proceedings of the IEEE Radar Conference (RadarCon), Arlington, VA, USA, 10–15 May 2015; pp. 1228–1233. [Google Scholar]
- Sklar, B. Digital Communications; Prentice Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Sukhatme, B.V. Sampling Theory of Surveys with Applications; Iowa State University Press: Ames, IA, USA, 1954. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Supported signals type | GPS C/A code signal |
| PRN code chip rate B | MHz |
| Signal transmission frequency | MHz (L1 band) |
| Signal transmission speed c | m/s |
| The duration of | |
| each code period | 1 ms |
| Sampling frequency | MHz |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Y.; Yang, Y.; Chen, W. A Novel Range Compression Algorithm for Resolution Enhancement in GNSS-SARs. Sensors 2017, 17, 1496. https://doi.org/10.3390/s17071496
Zheng Y, Yang Y, Chen W. A Novel Range Compression Algorithm for Resolution Enhancement in GNSS-SARs. Sensors. 2017; 17(7):1496. https://doi.org/10.3390/s17071496
Chicago/Turabian StyleZheng, Yu, Yang Yang, and Wu Chen. 2017. "A Novel Range Compression Algorithm for Resolution Enhancement in GNSS-SARs" Sensors 17, no. 7: 1496. https://doi.org/10.3390/s17071496
APA StyleZheng, Y., Yang, Y., & Chen, W. (2017). A Novel Range Compression Algorithm for Resolution Enhancement in GNSS-SARs. Sensors, 17(7), 1496. https://doi.org/10.3390/s17071496