A Stretchable Pressure-Sensitive Array Based on Polymer Matrix

Abstract
:1. Introduction
2. Materials and Methods
2.1. The Structure of the Pressure-Sensitive Array
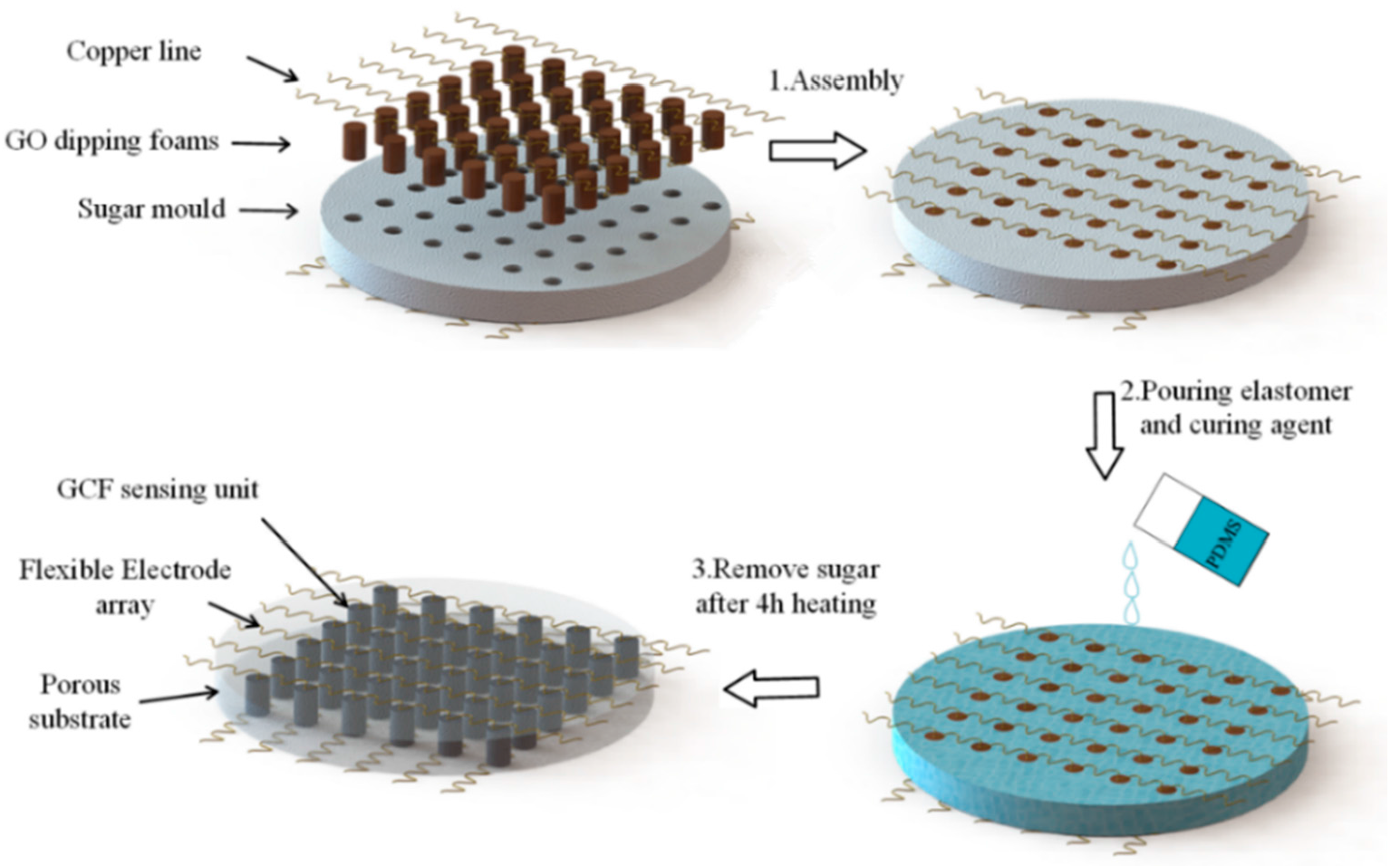
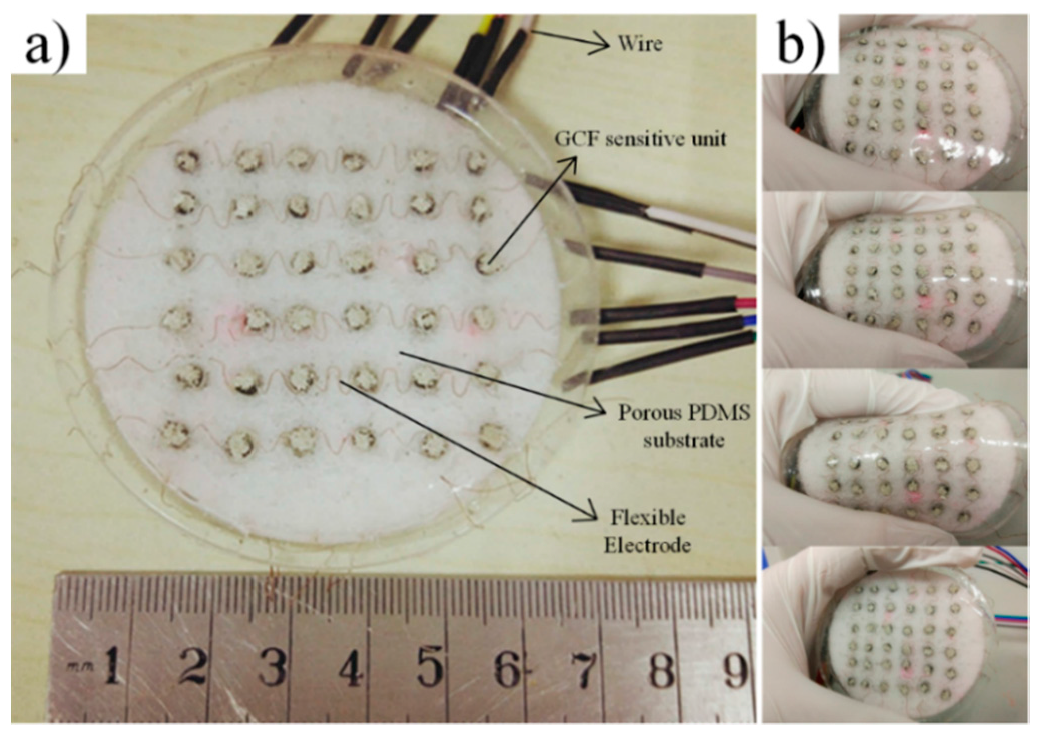
2.2. The Fabrication of the Sensor Array
2.3. Experimental Tests and Characterizations
2.4. Sensing Systems
3. Results
3.1. Morphological Analyses of GCF
3.2. Piezo-Resistive Characteristic
3.3. Piezo-Resistive Mechanism of GCF
3.4. Measurement and Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| PDMS | Polydimethylsiloxane |
| NPRC | Negative piezo resistive coefficient |
| GCF | Graphene-coated foam |
| rGO | Reduced graphene oxide |
| GO | Graphene oxide |
| 3D | Three-dimensional |
| 2D | Two-dimensional |
| CNT | Carbon nanotube |
| PU | Polyurethane |
| SEM | Scanning electron microscopy |
References
- Rinaldi, A.; Tamburrano, A.; Fortunato, M.; Sarto, M. A Flexible and Highly Sensitive Pressure Sensor Based on a PDMS Foam Coated with Graphene Nanoplatelets. Sensors 2016, 16, 2148. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.J.; Cheng, M.Y.; Chang, W.Y.; Tsao, L.C.; Yang, S.A.; Shih, W.P.; Chang, F.Y.; Chang, S.H.; Fan, K.C. An integrated flexible temperature and tactile sensing array using PI-copper films. Sens. Actuators A Phys. 2008, 143, 143–153. [Google Scholar] [CrossRef]
- Lim, S.; Son, D.; Kim, J.; Lee, Y.B.; Song, J.K.; Choi, S.; Lee, D.J.; Kim, J.H.; Lee, M.; Hyeon, T. Wearable Electronics: Transparent and Stretchable Interactive Human Machine Interface Based on Patterned Graphene Heterostructures. Adv. Funct. Mater. 2014, 25, 374. [Google Scholar] [CrossRef]
- Zang, Y.; Zhang, F.; Di, C.; Zhu, D. Advances of flexible pressure sensors toward artificial intelligence and health care applications. Mater. Horiz. 2014, 2, 25–59. [Google Scholar] [CrossRef]
- Lipomi, D.J.; Vosgueritchian, M.; Tee, B.C.; Hellstrom, S.L.; Lee, J.A.; Fox, C.H.; Bao, Z. Skin-like pressure and strain sensors based on transparent elastic films of carbon nanotubes. Nat. Nanotechnol. 2011, 6, 788–792. [Google Scholar] [CrossRef] [PubMed]
- Schwartz, G.; Tee, C.K.; Mei, J.; Appleton, A.L.; Kim, D.H.; Wang, H.; Bao, Z. Flexible polymer transistors with high pressure sensitivity for application in electronic skin and health monitoring. Nat. Commun. 2013, 4, 1859. [Google Scholar] [CrossRef] [PubMed]
- Jung, S.; Kim, J.H.; Kim, J.; Choi, S.; Lee, J.; Park, I.; Hyeon, T.; Kim, D.H. Reverse-Micelle-Induced Porous Pressure-Sensitive Rubber for Wearable Human–Machine Interfaces. Adv. Mater. 2014, 26, 4825–4830. [Google Scholar] [CrossRef] [PubMed]
- Cui, J.; Zhang, B.; Duan, J.; Guo, H.; Tang, J. Flexible Pressure Sensor with Ag Wrinkled Electrodes Based on PDMS Substrate. Sensors 2016, 16, 2131. [Google Scholar] [CrossRef] [PubMed]
- Hasan, S.A.U.; Jung, Y.; Kim, S.; Jung, C.L.; Oh, S.; Kim, J.; Lim, H. A Sensitivity Enhanced MWCNT/PDMS Tactile Sensor Using Micropillars and Low Energy Ar+ Ion Beam Treatment. Sensors 2016, 16, 93. [Google Scholar] [CrossRef] [PubMed]
- Cheng, M.Y.; Tsao, C.M.; Lai, Y.Z.; Yang, Y.J. The development of a highly twistable tactile sensing array with stretchable helical electrodes. Sens. Actuators A Phys. 2011, 166, 226–233. [Google Scholar] [CrossRef]
- Mei, H.; Wang, R.; Feng, J.; Xia, Y.; Zhang, T. A flexible pressure-sensitive array based on soft substrate. Sens. Actuators A Phys. 2015, 222, 80–86. [Google Scholar] [CrossRef]
- Kazemzadeh, R.; Andersen, K.; Motha, L.; Kim, W.S. Highly Sensitive Pressure Sensor Array with Photothermally Reduced Graphene Oxide. IEEE Electron Device Lett. 2015, 36, 180–182. [Google Scholar] [CrossRef]
- Stassi, S.; Cauda, V.; Canavese, G.; Pirri, C.F. Flexible Tactile Sensing Based on Piezoresistive Composites: A Review. Sensors 2014, 14, 5296–5332. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Dong, M.; Huang, W.; Gao, J.; Dai, K.; Guo, J.; Zheng, G.; Liu, C.; Shen, C.; Guo, Z. Lightweight conductive graphene/thermoplastic polyurethane foams with ultrahigh compressibility for piezoresistive sensing. J. Mater. Chem. C 2017, 5, 73–83. [Google Scholar] [CrossRef]
- Yao, H.B.; Ge, J.; Wang, C.F.; Wang, X.; Hu, W.; Zheng, Z.J.; Ni, Y.; Yu, S.H. A flexible and highly pressure-sensitive graphene-polyurethane sponge based on fractured microstructure design. Adv. Mater. 2013, 25, 6692–6698. [Google Scholar] [CrossRef] [PubMed]
- Choi, S.J.; Kwon, T.H.; Im, H.; Moon, D.I.; Baek, D.J.; Seol, M.L.; Duarte, J.P.; Choi, Y.K. A polydimethylsiloxane (PDMS) sponge for the selective absorption of oil from water. ACS Appl. Mater. Interfaces 2011, 3, 4552–4556. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Li, L.; Li, B.; Zhang, J.; Wang, A. Durable superhydrophobic/superoleophilic PDMS sponges and their applications in selective oil absorption and in plugging oil leakages. J. Mater. Chem. A 2014, 2, 18281–18287. [Google Scholar] [CrossRef]
- Saxena, R.S.; Bhan, R.K.; Saini, N.K.; Muralidharan, R. Virtual Ground Technique for Crosstalk Suppression in Networked Resistive Sensors. IEEE Sens. J. 2011, 11, 432–433. [Google Scholar] [CrossRef]
- Shen, B.; Yang, L.; Zhai, W.; Zheng, W. Compressible Graphene-Coated Polymer Foams with Ultralow Density for Adjustable Electromagnetic Interference (EMI) Shielding. ACS Appl. Mater. Interfaces 2016, 8, 8050–8057. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Zhang, D. A high sensitivity and high linearity pressure sensor based on a peninsula-structured diaphragm for low-pressure ranges. Sens. Actuators A Phys. 2014, 216, 176–189. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actual Pressure = 10 N | Actual Pressure = 50 N | ||||
|---|---|---|---|---|---|
| Sensing Position | Average Experimental Values (N) | Error (%) | Sensing Position | Average Experimental Values (N) | Error (%) |
| S11 | 10.6 | 1.2 | S11 | 45.8 | 8.4 |
| S12 | 10.2 | 0.4 | S12 | 46.4 | 7.2 |
| S13 | 11.4 | 2.8 | S13 | 47.6 | 5.6 |
| S21 | 11.8 | 3.6 | S21 | 45.9 | 8.2 |
| S22 | 11.5 | 3.0 | S22 | 46.1 | 7.8 |
| S23 | 11.7 | 3.4 | S23 | 46.7 | 6.6 |
| S31 | 12.4 | 4.8 | S31 | 45.1 | 9.8 |
| S32 | 11.6 | 3.2 | S32 | 46.6 | 6.8 |
| S33 | 10.8 | 1.6 | S33 | 47.1 | 5.8 |
| Ref. | Functional Material | No. of Sensing Units | Substrat | Sensor Type | Range | Responses | Sensitivity |
|---|---|---|---|---|---|---|---|
| [8] | CNTs | 9 | PDMS | Capacitance | <10 kPa | 200 ms | 19.8% kPa−1 |
| [12] | rGO | 5 | — | Piezoresistive | — | 1 s | 19 mV/kPa |
| [11] | Conductive rubber | 16 | PDMS | Piezoresistive | 0–320 kPa | 2 s | — |
| Our work | GCF | 36 | Porous PDMS | Piezoresistive | 0–95 kPa | 500 ms | 51 mV/kPa |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, Y.; Xiao, Q.; Li, B. A Stretchable Pressure-Sensitive Array Based on Polymer Matrix. Sensors 2017, 17, 1571. https://doi.org/10.3390/s17071571
Luo Y, Xiao Q, Li B. A Stretchable Pressure-Sensitive Array Based on Polymer Matrix. Sensors. 2017; 17(7):1571. https://doi.org/10.3390/s17071571
Chicago/Turabian StyleLuo, Yuanzheng, Qi Xiao, and Buyin Li. 2017. "A Stretchable Pressure-Sensitive Array Based on Polymer Matrix" Sensors 17, no. 7: 1571. https://doi.org/10.3390/s17071571
APA StyleLuo, Y., Xiao, Q., & Li, B. (2017). A Stretchable Pressure-Sensitive Array Based on Polymer Matrix. Sensors, 17(7), 1571. https://doi.org/10.3390/s17071571