Autonomous Landmark Calibration Method for Indoor Localization

Abstract
:1. Introduction
2. Materials and Methods
2.1. Structural Landmark Identification
2.2. Spontaneous Landmark Identification
3. Results
4. Discussion
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lu, G.; Yan, Y.; Kolagunda, A.; Kambhamettu, C. A Fast 3D Indoor-Localization Approach Based on Video Queries. In Proceedings of the International Conference on Multimedia Modeling, Miami, FL, USA, 4–6 January 2016; pp. 218–230. [Google Scholar]
- Lu, G.; Yan, Y.; Sebe, N.; Kambhamettu, C. Knowing Where I Am: Exploiting Multi-Task Learning for Multi-View Indoor Image-Based Localization. In Proceedings of the British Machine Vision Conference, Nottingham, UK, 1–5 September 2014; pp. 1–12. [Google Scholar]
- Liu, H.; Gan, Y.; Yang, J.; Sidhom, S.; Wang, Y.; Chen, Y.; Ye, F. Push the Limit of WiFi Based Localization for Smartphone. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking (MobiCom’12), Istanbul, Turkey, 22–26 August 2012; pp. 305–316. [Google Scholar]
- Liu, H.; Yang, J.; Sidhom, S.; Wang, Y.; Chen, Y.; Ye, F. Accurate WiFi Based Localization for Smartphones Using Peer Assistance. IEEE Trans. Mob. Comput. 2014, 13, 2199–2214. [Google Scholar] [CrossRef]
- Shu, Y.; Huang, Y.; Zhang, J.; Coué, P.; Cheng, P.; Chen, J.; Shin, K.G. Gradient-Based Fingerprinting for Indoor Localization and Tracking. IEEE Trans. Ind. Electron. 2016, 63, 2424–2433. [Google Scholar] [CrossRef]
- Seco, E.; Jimenez, A.R.; Prieto, C.; Roa, J.; Koutsou, K. A survey of mathematical methods for indoor localization. In Proceedings of the IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 9–14. [Google Scholar]
- Roos, T.; Myllymäki, P.; Tirri, H.; Misikangas, P.; Sievänen, J. A probabilistic approach to WLAN user location estimation. Int. J. Wirel. Inf. Netw. 2002, 9, 155–164. [Google Scholar] [CrossRef]
- Youssef, M.; Agrawala, A. The Horus WLAN location determination system. In Proceedings of the 3rd International Conference on Mobile System Application Services, Seattle, WA, USA, 6–8 June 2005; pp. 205–218. [Google Scholar]
- Müller, P.; Raitoharju, M.; Piché, R. A field test of parametric WLAN-fingerprint-positioning methods. In Proceedings of the 17th International Conference on Information Fusion, Salamanca, Spain, 7–10 July 2014; pp. 1–8. [Google Scholar]
- Koski, L.; Piché, R.; Kaseva, V.; Ali-Löytty, S.; Hännikäinen, M. Positioning with coverage area estimates generated from location fingerprints. In Proceedings of the 7th Workshop on Positioning Navigation Communication, Dresden, Germany, 11–12 March 2010; pp. 99–106. [Google Scholar]
- Feng., Y.; Minghua, J.; Jing, L.; Xiao, Q.; Ming, H.; Tao, P.; Xinrong, H. An improved indoor localization of WiFi based on support vector machines. Int. J. Future Gener. Commun. Netw. 2014, 7, 191–206. [Google Scholar]
- Sánchez-Rodríguez, D.; Hernández-Morera, P.; Quinteiro, J.M.; Alonso-González, I. A low complexity system based on multiple weighted decision trees for indoor localization. Sensors 2015, 15, 14809–14829. [Google Scholar] [CrossRef] [PubMed]
- Haverinen, J.; Kemppainen, A. Global indoor self-localization based on the ambient magnetic field. Robot. Auton. Syst. 2009, 57, 1028–1035. [Google Scholar] [CrossRef]
- Berkovich, G. Accurate and reliable real-time indoor positioning on commercial smartphone. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Busan, Korea, 27–30 October 2014; pp. 670–677. [Google Scholar]
- Gozick, B.; Subbu, K.P.; Dantu, R.; Maeshiro, T. Magnetic maps for indoor navigation. IEEE Trans. Instrum. Meas. 2011, 60, 3883–3891. [Google Scholar] [CrossRef]
- Abadi, M.J.; Luceri, L.; Hassan, M.; Chou, C.T.; Nicoli, M. A collaborative approach to heading estimation for smartphone-based PDR indoor localization. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Busan, Korea, 27–30 October 2014; pp. 554–563. [Google Scholar]
- Shu, Y.; Bo, C.; Shen, G.; Zhao, C.; Li, L.; Zhao, F. Magicol: Indoor localization using pervasive magnetic field and opportunistic WiFi sensing. IEEE J. Sel. Areas Commun. 2015, 33, 1443–1457. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Montoliu, R.; Mendoza-Sinva, G.M.; Belmonte, O.; Rambla, D.; Huerata, J. Providing databases for different indoor positioning technologies: Pros and cons of magnetic field and Wi-Fi based positioning. Mob. Inf. Syst. 2016, 2016, 1–22. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, C.; Liu, F.; Dong, Y.; Xu, X. Exponentially Weighted Particle Filter for Simultaneous Localization and Mapping Based on Magnetic Field Measurements. IEEE Trans. Instrum. Meas. 2017, 66, 1658–1667. [Google Scholar] [CrossRef]
- Madson, R.; Rajamani, R. Adaptive Dipole Model Based Disturbance Compensation in Nonlinear Magnetic Position Systems. IEEE/ASME Trans. Mechatron. 2017, 22, 794–803. [Google Scholar] [CrossRef]
- Renaudin, V.; Combettes, C.; Peyret, F. Quaternion based heading estimation with handheld MEMS in indoor environments. In Proceedings of the IEEE/ION on Position Location Navigation Symposium, Monterey, CA, USA, 5–8 May 2014; pp. 645–656. [Google Scholar]
- Combettes, C.; Renaudin, V. Comparison of misalignment estimation techniques between handheld device and walking directions. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Banff, AB, Canada, 13–16 October 2015; pp. 1–8. [Google Scholar]
- Harle, R. A survey of indoor inertial positioning systems for pedestrians. IEEE Commun. Surv. Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Gu, Y.; Lo, A.; Niemegeers, I. A Survey of Indoor Positioning Systems for Wireless Personal Networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Turetzky, G. Indoor Positioning with SiRFusion for Next Generation E-911. Available online: https://transition.fcc.gov/bureaus/pshs/docs/summits/911%20Location%20Acuracy/Greg_Turetzky.pdf (accessed on 24 August 2017).
- Fuchs, C.; Aschenbruck, N.; Martini, P.; Wieneke, M. Indoor tracking for mission critical scenarios: A survey. Pervasive Mob. Comput. 2011, 7, 1–15. [Google Scholar] [CrossRef]
- Beauregard, S.; Haas, H. Pedestrian Dead Reckoning: A Basis for Personal Positioning. In Proceedings of the 3rd workshop on positioning, navigation and communication, Hannover, Germany, 16 March 2006. [Google Scholar]
- Jim’enez, A.R.; Seco, F.; Prieto, C.; Guevara, J. A Comparison of Pedestrian Dead-Reckoning Algorithms Using a Low-Cost MEMS IMU. In Proceedings of the IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009. [Google Scholar]
- Wang, H.; Lenz, H.; Szabo, A.; Bamberger, J.; Hanebeck, U.D. WLAN-based pedestrian tracking using particle filters and low-cost MEMS sensors. In Proceedings of the Workshop on Positioning, Navigation and Communication, Hannover, Germany, 22 March 2007; pp. 1–7. [Google Scholar]
- Korbinian, F. Development and evaluation of a combined WLAN & inertial indoor pedestrian positioning system. In Proceedings of the 4th International Symposium on Location and Context Awareness, Savannah, GA, USA, 22–25 September 2009. [Google Scholar]
- Wang, H.; Sen, S.; Elgohary, A.; Farid, M.; Youssef, M.; Choudhury, R.R. Unsupervised Indoor Localization. In Proceedings of the International Conference on Mobile Systems, Applications, and Services, Low Wood Bay, UK, 25–29 June 2012; pp. 499–500. [Google Scholar]
- Wikipedia. Central Limit Theorem. Available online: https://en.wikipedia.org/wiki/Central_limit_theorem (accessed on 21 July 2017).
- Wikipedia. Chi-Square Distribution. Available online: https://en.wikipedia.org/wiki/Chi-squared_distribution (accessed on 21 July 2017).
- Fisher, R.A. Statistical Methods for Research Workers; Springer: New York, NY, USA, 1954. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Landmark | Observation | Visualization |
|---|---|---|
| Corridor | Typical vibration/fluctuation on the z-axis of the accelerometer |  |
| Corner | Changes corresponding to a corner are measured by the yaw-axis (z-axis) of the gyroscope over the ± 1.5 rad/s |  |
| Stair | A large fluctuation variance in the z-axis of the accelerometer (approximately greater than twice the fluctuation variance corresponding to a corridor) |  |
| The change in the direction measured by the yaw-axis of the gyroscope (Turning into a corner is observed additionally) |  | |
| Escalator | The on–off pattern of the fluctuation variance on the z-axis of the accelerometer over a relatively long duration (less than 20 s) |  |
| Signature | Key Criteria | Mean | Maximum | Minimum | Variance |
|---|---|---|---|---|---|
| Stationary | z-axis accelerometer (m/s2) | 8.973 | 9.32 | 8.707 | 0.009 |
| Corridor | z-axis accelerometer | 9.1099 | 14.9578 | 5.9023 | 2.3549 |
| Corner | z-axis gyroscope (rad/s) | 0.0151 | 2.0107 | −1.603 | 0.1741 |
| Stair | z-axis accelerometer | 8.7039 | 19.6085 | 2.6965 | 4.0408 |
| Escalator | z-axis gyroscope | 0.0298 | 3.0201 | −2.703 | 0.2132 |
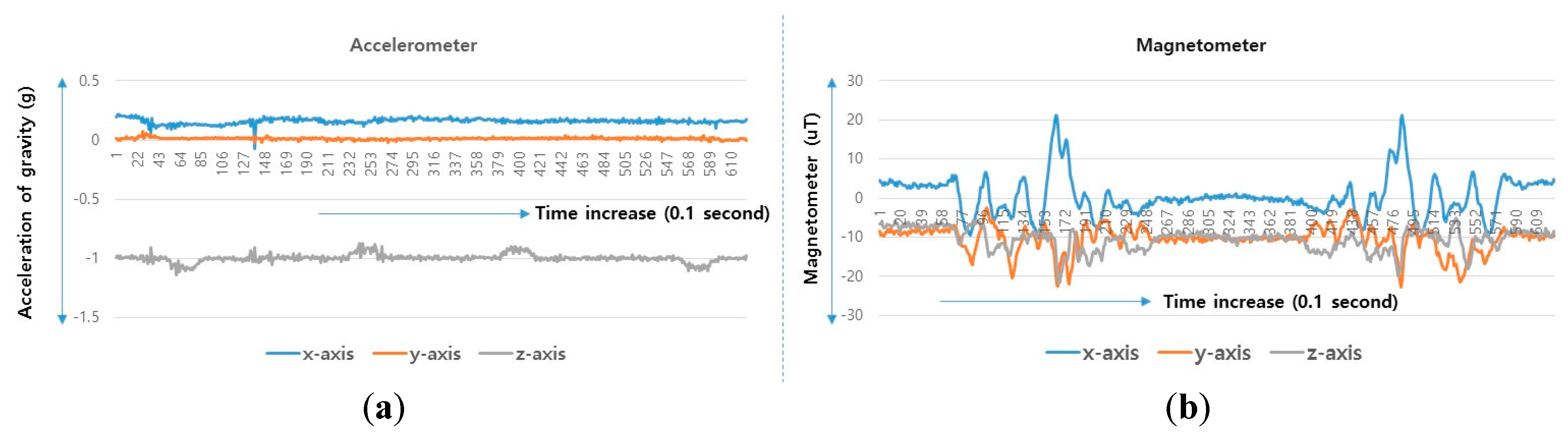
| Elevator | z-axis magnetometer (µT) | −10.5621 | −5.1028 | −21.8373 | 7.721 |
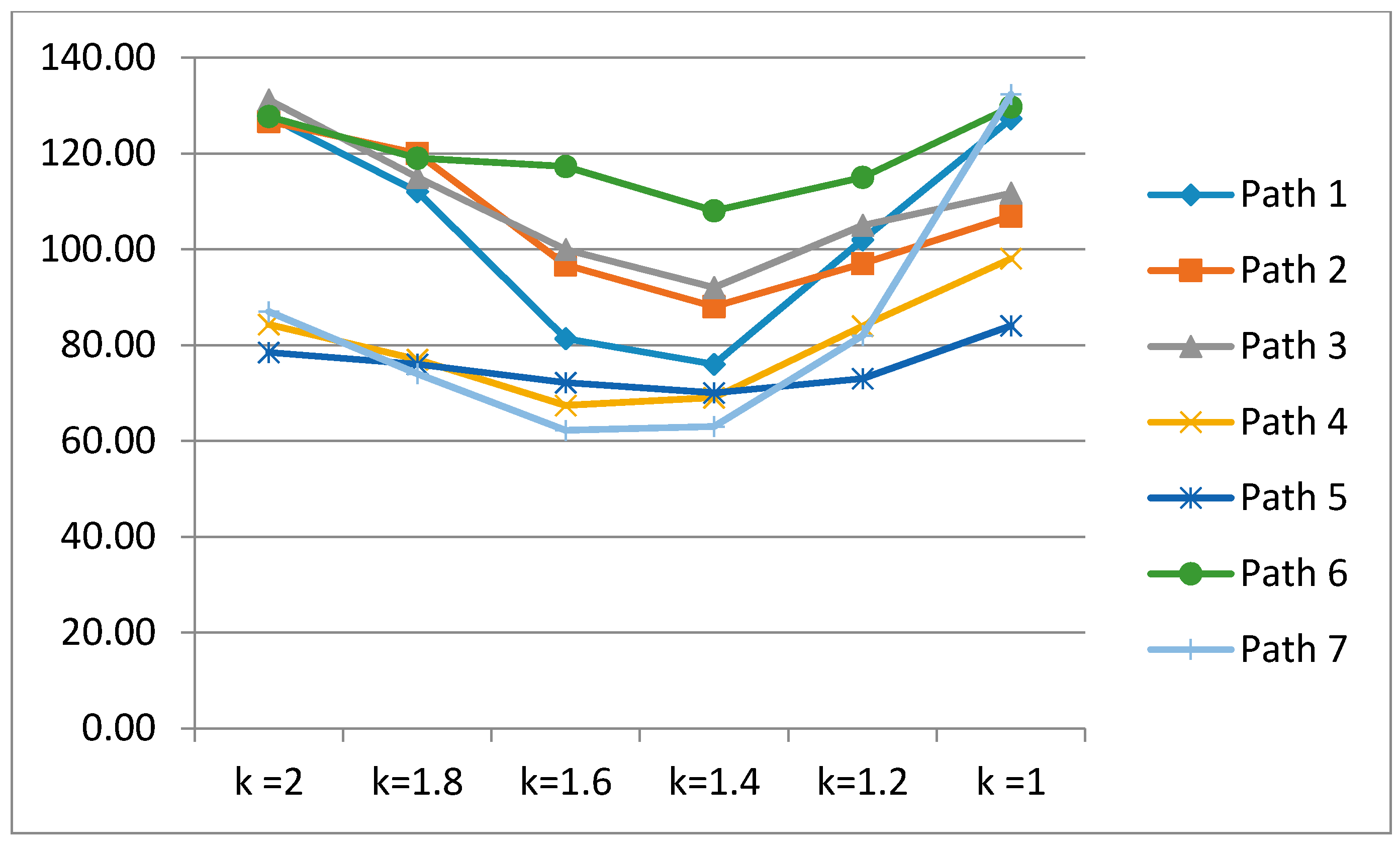
| k = 2 | k = 1.5 | k = 1 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Error | Number of Landmarks | Error | Number of Landmarks | Error | Number of Landmarks | ||||
| Structural | Spontaneous | Structural | Spontaneous | Structural | Spontaneous | ||||
| Path1 | 127.69 | 3 | 5 | 80.33 | 3 | 7 | 127.24 | 3 | 10 |
| Path2 | 126.66 | 3 | 4 | 94.71 | 3 | 7 | 106.93 | 3 | 9 |
| Path3 | 131.16 | 4 | 6 | 97.94 | 4 | 7 | 111.71 | 4 | 9 |
| Path4 | 84.29 | 4 | 7 | 64.38 | 4 | 8 | 98.05 | 4 | 11 |
| Path5 | 78.47 | 5 | 7 | 71.15 | 5 | 9 | 84.04 | 5 | 13 |
| Path6 | 127.69 | 5 | 8 | 116.28 | 5 | 10 | 129.73 | 5 | 14 |
| Path7 | 86.95 | 7 | 10 | 59.17 | 7 | 13 | 132.32 | 7 | 16 |
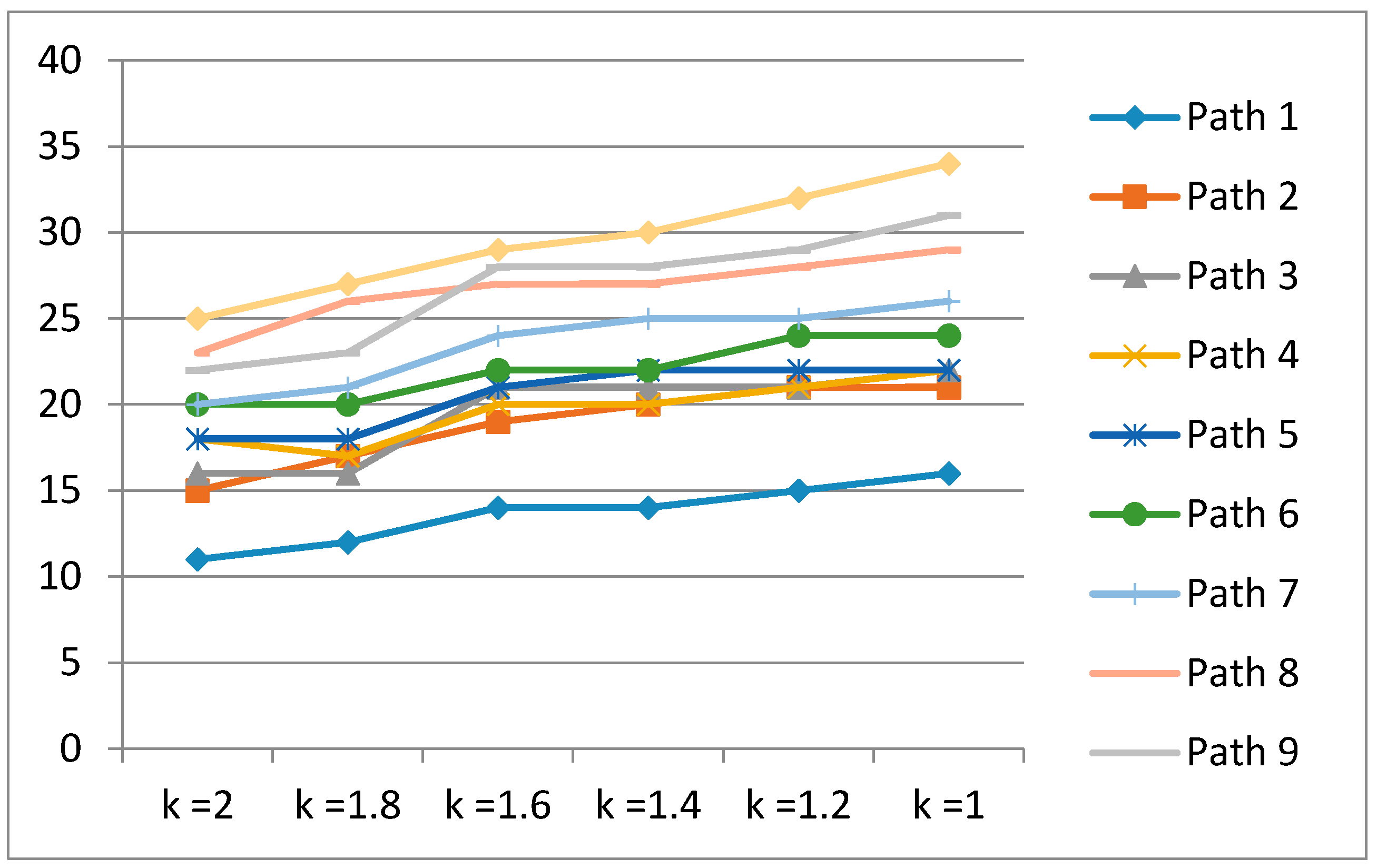
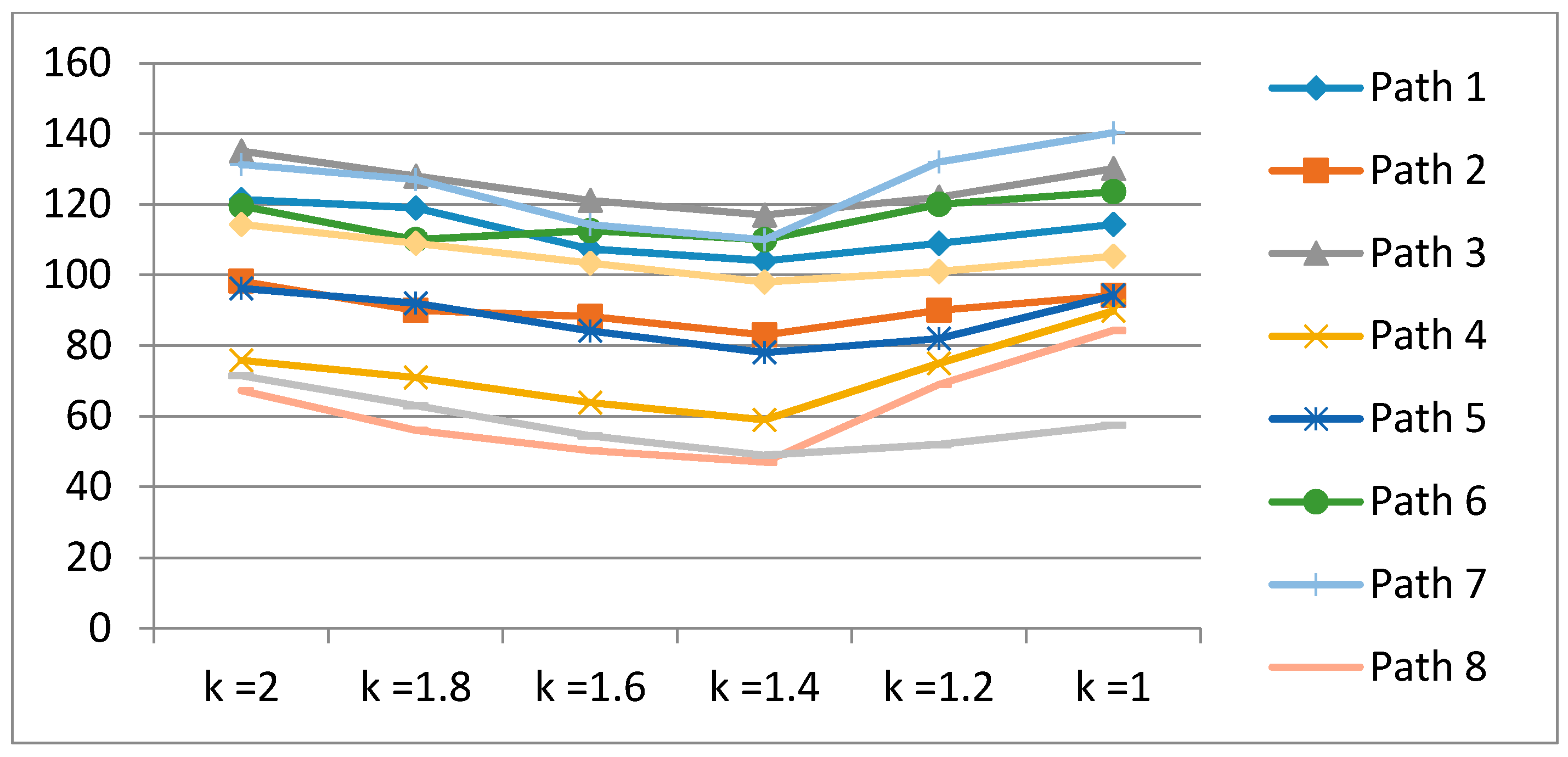
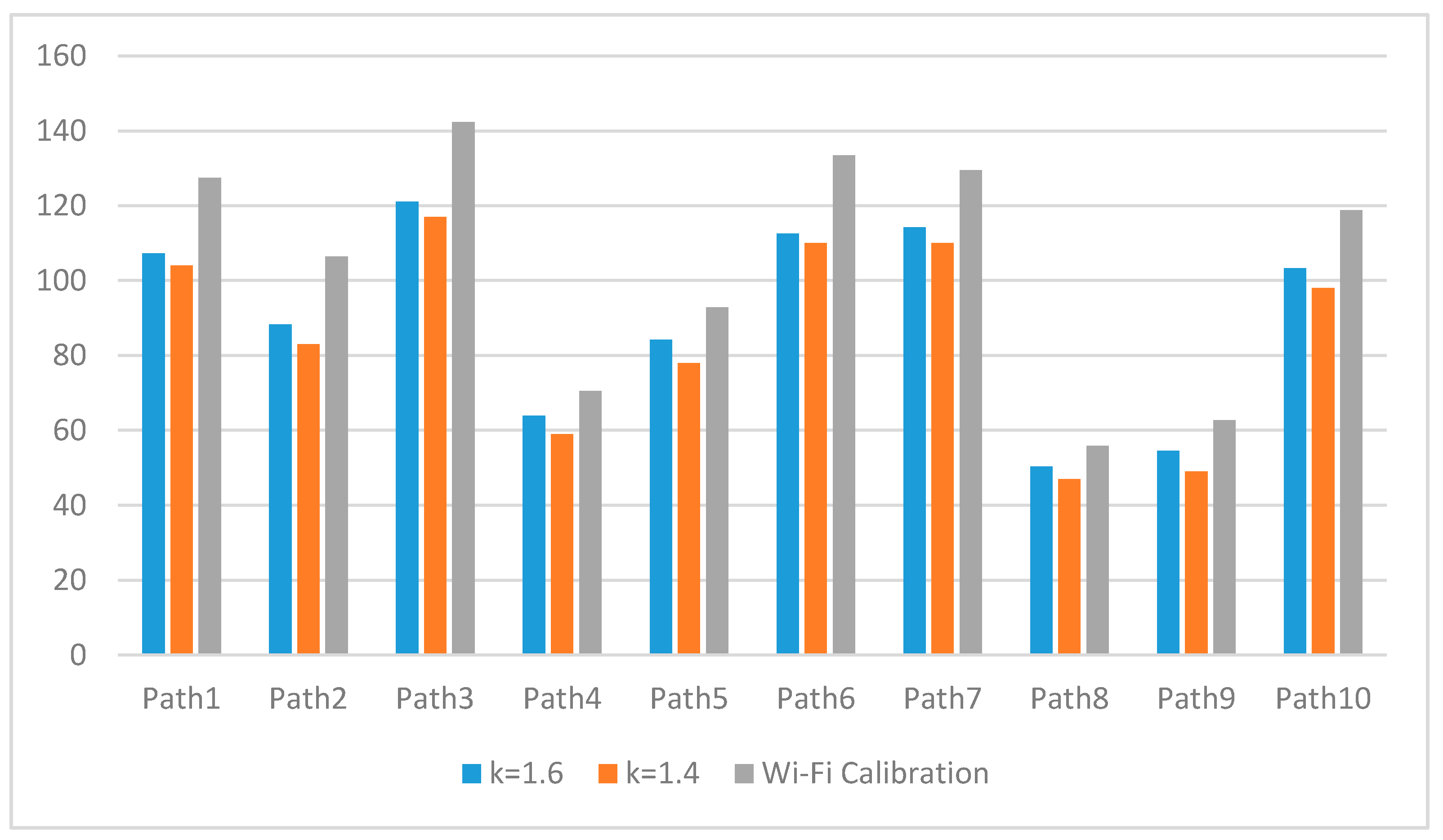
| k = 2 | k = 1.5 | k = 1 | ||||
|---|---|---|---|---|---|---|
| Error | Number of Recalibration | Error | Number of Recalibration | Error | Number of Recalibration | |
| Path1 | 121.31 | 11 | 106.31 | 14 | 114.31 | 16 |
| Path2 | 98.24 | 15 | 86.24 | 19 | 94.24 | 21 |
| Path3 | 135.12 | 16 | 119.12 | 21 | 130.12 | 22 |
| Path4 | 75.87 | 18 | 62.87 | 20 | 89.87 | 22 |
| Path5 | 96.19 | 18 | 82.19 | 21 | 94.19 | 22 |
| Path6 | 119.56 | 20 | 102.56 | 22 | 118.56 | 24 |
| Path7 | 131.29 | 20 | 112.29 | 24 | 140.29 | 26 |
| Path8 | 67.31 | 23 | 48.31 | 27 | 84.31 | 29 |
| Path9 | 71.49 | 22 | 53.49 | 28 | 57.49 | 31 |
| Path10 | 114.35 | 25 | 102.35 | 29 | 105.35 | 34 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.-H.; Kim, B.-S. Autonomous Landmark Calibration Method for Indoor Localization. Sensors 2017, 17, 1952. https://doi.org/10.3390/s17091952
Kim J-H, Kim B-S. Autonomous Landmark Calibration Method for Indoor Localization. Sensors. 2017; 17(9):1952. https://doi.org/10.3390/s17091952
Chicago/Turabian StyleKim, Jae-Hoon, and Byoung-Seop Kim. 2017. "Autonomous Landmark Calibration Method for Indoor Localization" Sensors 17, no. 9: 1952. https://doi.org/10.3390/s17091952
APA StyleKim, J. -H., & Kim, B. -S. (2017). Autonomous Landmark Calibration Method for Indoor Localization. Sensors, 17(9), 1952. https://doi.org/10.3390/s17091952