Quantified, Interactive Simulation of AMCW ToF Camera Including Multipath Effects


Abstract
:1. Introduction
- Enhancement of the Reflective Shadow Map (RSM) algorithm [6] for GPU-based, interactive, single-bounce, image-space, multipath interference simulation.
- BRDF-based reflection simulation for measured real-world materials.
- Extension of the simulation model to include realistic electronic and optical shot noise.
- Measurement of isotropic BRDF at 850 nm wavelength for several specified materials that can be purchased worldwide and thus can be used to reproduce scenes reliably.
- Quantitative evaluations of the proposed simulator based on AMCW ToF camera acquisition of real-world reference scenes. We clearly see the improved ToF simulation results of our single-bounce approach over direct simulation in terms of quality, and over higher-order global illumination simulation [4] in terms of computational performance.
- Publicly available simulator, BRDF data including references to material vendors, geometry of the reference scenes, and real AMCW ToF camera measurements, in order to promote further activities in quantitative evaluation of AMCW ToF simulation.
2. Related Work
3. Time-of-Flight Simulation
3.1. Direct Light Propagation
3.2. Sensor Pixel Model
3.3. Multipath Simulation
3.4. Noise Model
4. NIR BRDF Measurements
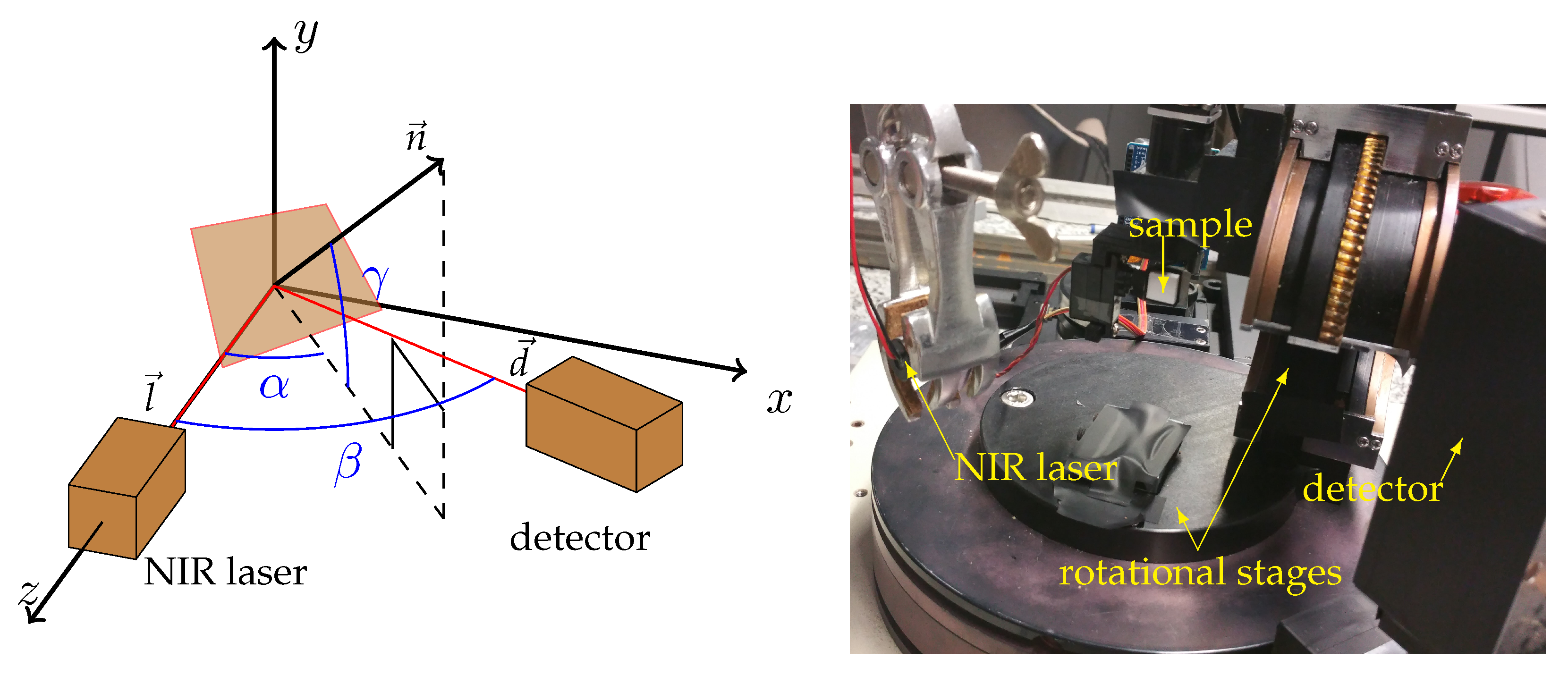
4.1. Measurement Setup
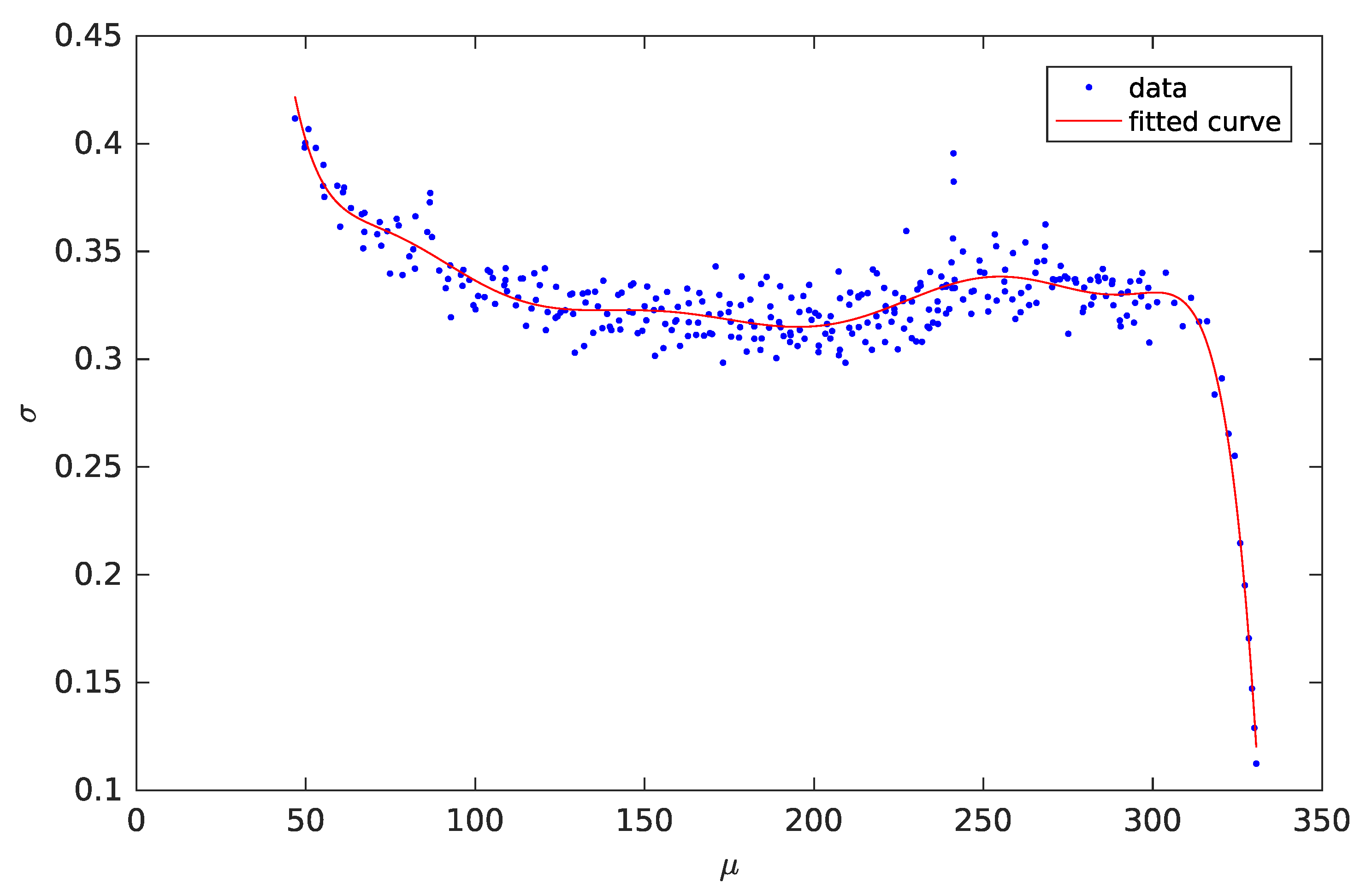
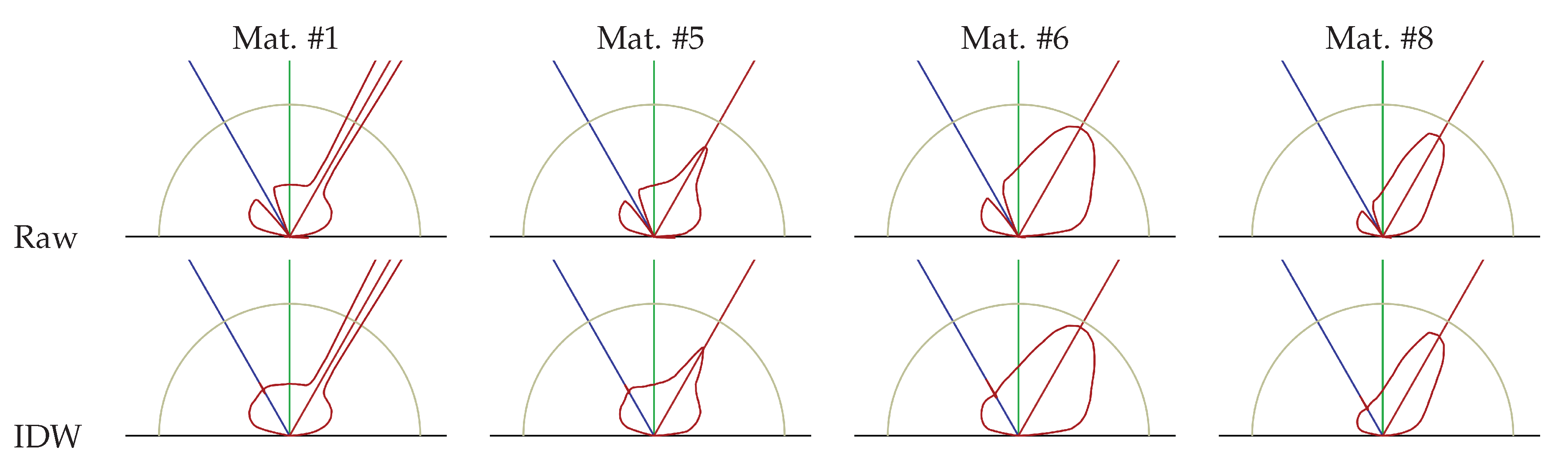
4.2. Extrapolating BRDF Measurements
5. Results
5.1. BRDF Measurement
Open Science
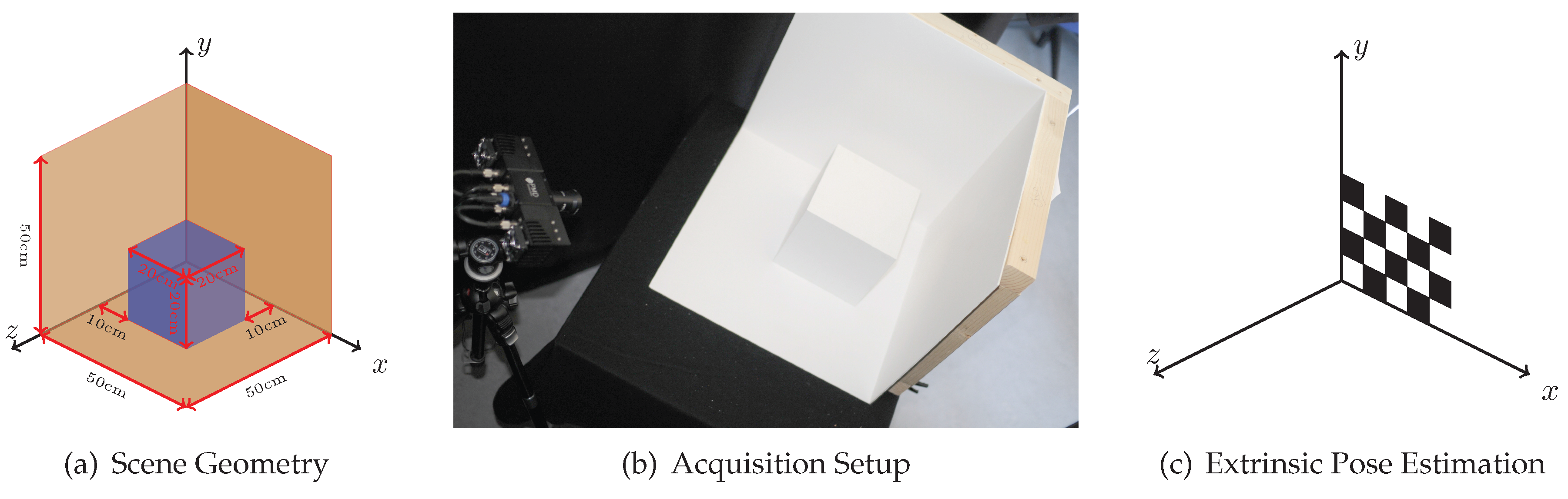
5.2. Simulator Evaluation
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kolb, A.; Barth, E.; Koch, R.; Larsen, R. Time-of-Flight cameras in computer graphics. Comput. Graph. Forum 2010, 29, 141–159. [Google Scholar] [CrossRef]
- Lambers, M.; Hoberg, S.; Kolb, A. Simulation of Time-of-Flight sensors for evaluation of chip layout variants. IEEE Sens. 2015, 15, 4019–4026. [Google Scholar] [CrossRef]
- Nair, R.; Meister, S.; Lambers, M.; Balda, M.; Hofmann, H.; Kolb, A.; Kondermann, D.; Jähne, B. Ground truth for evaluating time of flight imaging. In Time-of-Flight and Depth Imaging. Sensors, Algorithms, and Applications; Springer: Berlin/Heidelberg, Germany, 2013; pp. 52–74. [Google Scholar]
- Meister, S.; Nair, R.; Kondermann, D. Simulation of Time-of-Flight sensors using global illumination. In Vision, Modeling & Visualization; The Eurographics Association: Geneve, Switzerland, 2013. [Google Scholar]
- Keller, M.; Kolb, A. Real-time simulation of time-of-flight sensors. Simul. Model. Pract. Theory 2009, 17, 967–978. [Google Scholar] [CrossRef]
- Dachsbacher, C.; Stamminger, M. Reflective shadow maps. In Proceedings of the Symposium on Interactive 3D Graphics and Games, Washington, DC, USA, 3–6 April 2005; pp. 203–231. [Google Scholar]
- Schmidt, M.; Jähne, B. A physical model of time-of-flight 3D imaging systems, including suppression of ambient light. In Dynamic 3D Imaging; Springer: Berlin, Germany, 2009; pp. 1–15. [Google Scholar]
- Ritschel, T.; Dachsbacher, C.; Grosch, T.; Kautz, J. The state of the art in interactive global illumination. Comput. Graph. Forum 2012, 31, 160–188. [Google Scholar] [CrossRef]
- Matusik, W.; Pfister, H.; Brand, M.; McMillan, L. A Data-Driven Reflectance Model. ACM Trans. Graph. 2003, 22, 759–769. [Google Scholar] [CrossRef]
- Choe, G.; Narasimhan, S.G.; So Kweon, I. Simultaneous estimation of near IR BRDF and fine-scale surface geometry. In Proceedings of the IEEE 2016 IEEE Conference on Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 2452–2460. [Google Scholar]
- Mutny, M.; Nair, R.; Gottfried, J.M. Learning the correction for Multi-Path deviations in Time-of-Flight Cameras. arXiv, 2015; arXiv:1512.04077. [Google Scholar]
- Lange, R.; Seitz, P. Solid-state time-of-flight range camera. IEEE J. Quantum Electron. 2001, 37, 390–397. [Google Scholar] [CrossRef]
- Keller, A. Instant radiosity. In Proceedings of the Conference on Computer Graphics and Interactive Techniques (SIGGRAPH), Los Angeles, CA, USA, 3–8 August 1997; pp. 49–56. [Google Scholar]
- Conde, M.H.; Zhang, B.; Kagawa, K.; Loffeld, O. Low-light image enhancement for multiaperture and multitap systems. IEEE Photonics J. 2016, 8, 1–25. [Google Scholar] [CrossRef]
- White, G.C.; Bennetts, R.E. Analysis of frequency count data using the negative binomial distribution. Ecology 1996, 77, 2549–2557. [Google Scholar] [CrossRef]
- Freeman, M.F.; Tukey, J.W. Transformations related to the angular and the square root. Ann. Math. Stat. 1950, 21, 607–611. [Google Scholar] [CrossRef]
- Schlick, C. An Inexpensive BRDF Model for Physically-based Rendering. Comput. Graph. Forum 1994, 13, 233–246. [Google Scholar] [CrossRef]
- Achutha, S. BRDF Acquisition with Basis Illumination; Chapter 2.2 “BRDF Acquisition”. Ph.D. Thesis, The University of British Columbia, Vancouver, BC, Canada, 2006. [Google Scholar]
- Li, H.; Foo, S.C.; Torrance, K.E.; Westin, S.H. Automated three-axis gonioreflectometer for computer graphics applications. Opt. Eng. 2006, 45, 043605. [Google Scholar] [CrossRef]
- Panzer, J.; Ponteggia, D. Inverse Distance Weighting for Extrapolating Balloon-Directivity-Plots; AES Convention 13; Audio Engineering Society: New York, NY, USA, 2011. [Google Scholar]
- All-Foam Products Company. Available online: http://products.allfoam.com/ (accessed on 20 December 2017).
- Evonik Cyro LCC. Available online: http://www.plexiglas-shop.com/ (accessed on 20 December 2017).
- Lindner, M.; Schiller, I.; Kolb, A.; Koch, R. Time-of-Flight Sensor Calibration for Accurate Range Sensing. Comput. Vis. Image Underst. 2010, 114, 1318–1328. [Google Scholar] [CrossRef]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. (PAMI) 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Lindner, M. Calibration and Realtime Processing of Time-of-Flight Range Data. Ph.D. Thesis, University of Siegen, Computer Graphics Group, Siegen, Germany, 2010. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mat. No. | PLEXIGLAS (Glossy) | Mat. No. | Guttagliss PVC (Diffuse) |
|---|---|---|---|
| 1 | XT (allround), White WN297 GT | 5 | Rigid Foam, White |
| 2 | XT (allround), Red 3N570 GT | 6 | Rigid Foam, Red |
| 3 | XT (allround), Green 6N570 GT | 7 | Rigid Foam, Green |
| 4 | XT (allround), Blue 5N870 GT | 8 | Rigid Foam, Blue |
| 9 | Rigid Foam, Yellow | ||
| 10 | Rigid Foam, Gray |
| Corner | CornerCube | CornerCubeShifted | |||||
|---|---|---|---|---|---|---|---|
| Material #1 | Material #5 | Material #1 | Material #5 | Material #1 | Material #5 | ||
| GroundTruth | |||||||
| MAE | 0.1001 | 0.0998 | 0.0831 | 0.0790 | 0.0969 | 0.0897 | |
| MSE | 0.0103 | 0.0105 | 0.0071 | 0.0068 | 0.0106 | 0.0091 | |
| RMSE | 0.1017 | 0.1025 | 0.0853 | 0.0823 | 0.1029 | 0.0956 | |
| SimDirect | |||||||
| MAE | 0.0885 | 0.0884 | 0.0728 | 0.0688 | 0.0846 | 0.0777 | |
| MSE | 0.0084 | 0.0085 | 0.0079 | 0.0069 | 0.0086 | 0.0074 | |
| RMSE | 0.0916 | 0.0924 | 0.0888 | 0.0829 | 0.0927 | 0.0859 | |
| SimSingle | |||||||
| MAE | 0.0238 | 0.0200 | 0.0194 | 0.0138 | 0.0396 | 0.0342 | |
| MSE | 0.0007 | 0.0005 | 0.0006 | 0.0003 | 0.0023 | 0.0017 | |
| RMSE | 0.0270 | 0.0226 | 0.0233 | 0.0171 | 0.0476 | 0.0417 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bulczak, D.; Lambers, M.; Kolb, A. Quantified, Interactive Simulation of AMCW ToF Camera Including Multipath Effects. Sensors 2018, 18, 13. https://doi.org/10.3390/s18010013
Bulczak D, Lambers M, Kolb A. Quantified, Interactive Simulation of AMCW ToF Camera Including Multipath Effects. Sensors. 2018; 18(1):13. https://doi.org/10.3390/s18010013
Chicago/Turabian StyleBulczak, David, Martin Lambers, and Andreas Kolb. 2018. "Quantified, Interactive Simulation of AMCW ToF Camera Including Multipath Effects" Sensors 18, no. 1: 13. https://doi.org/10.3390/s18010013
APA StyleBulczak, D., Lambers, M., & Kolb, A. (2018). Quantified, Interactive Simulation of AMCW ToF Camera Including Multipath Effects. Sensors, 18(1), 13. https://doi.org/10.3390/s18010013