Feasibility of Detecting Natural Frequencies of Hydraulic Turbines While in Operation, Using Strain Gauges

 ,
,  ,
,
Abstract
:1. Introduction
2. Dynamics of a Francis Turbine Runner
2.1. Modal Behavior of a Francis Turbine Runner
2.2. Excitation Phenomena in Francis Turbines
2.2.1. Periodic Excitation
2.2.2. Transient Excitation
2.2.3. Random Excitation
3. Experimental Tests
3.1. Description of the Selected Turbine
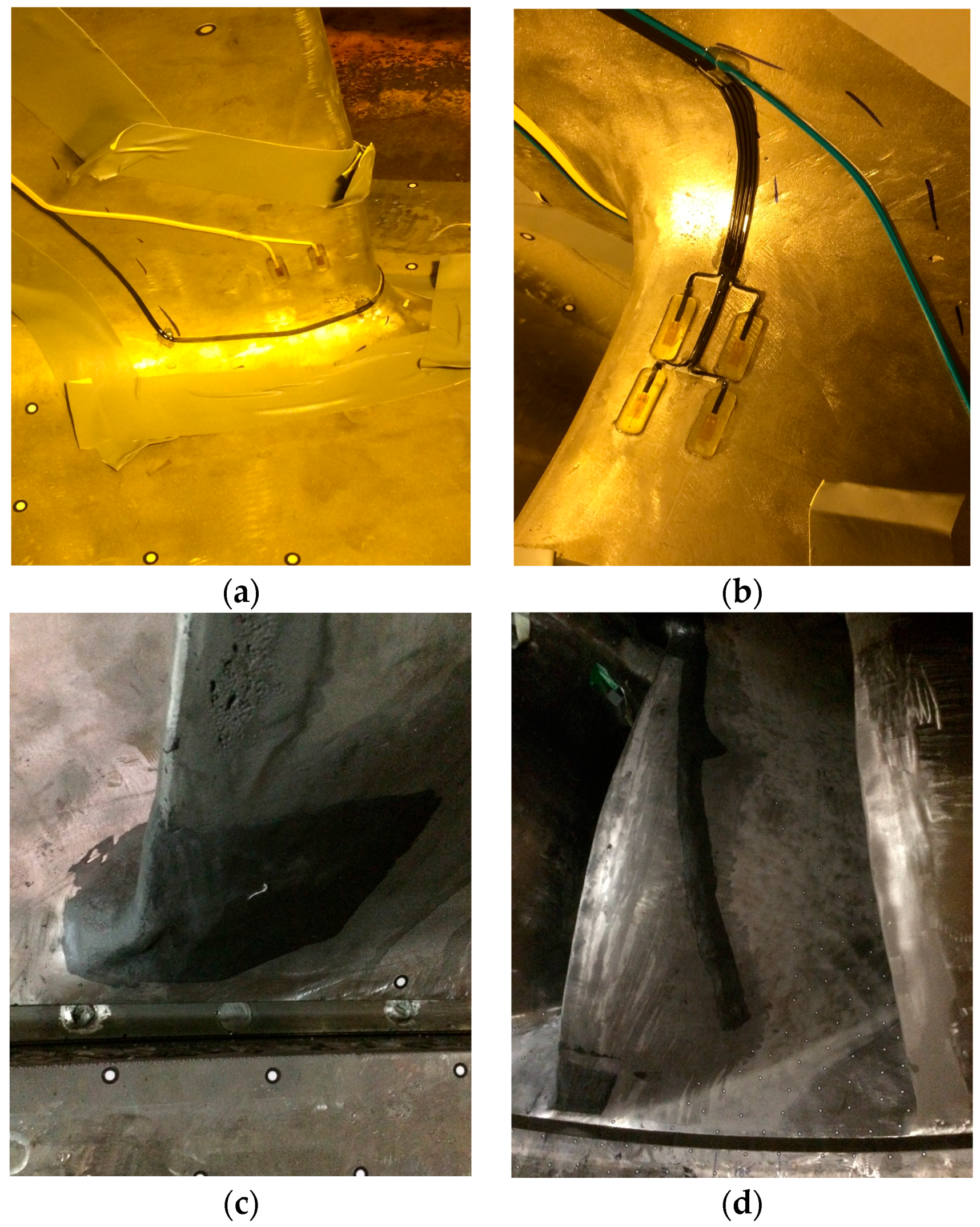
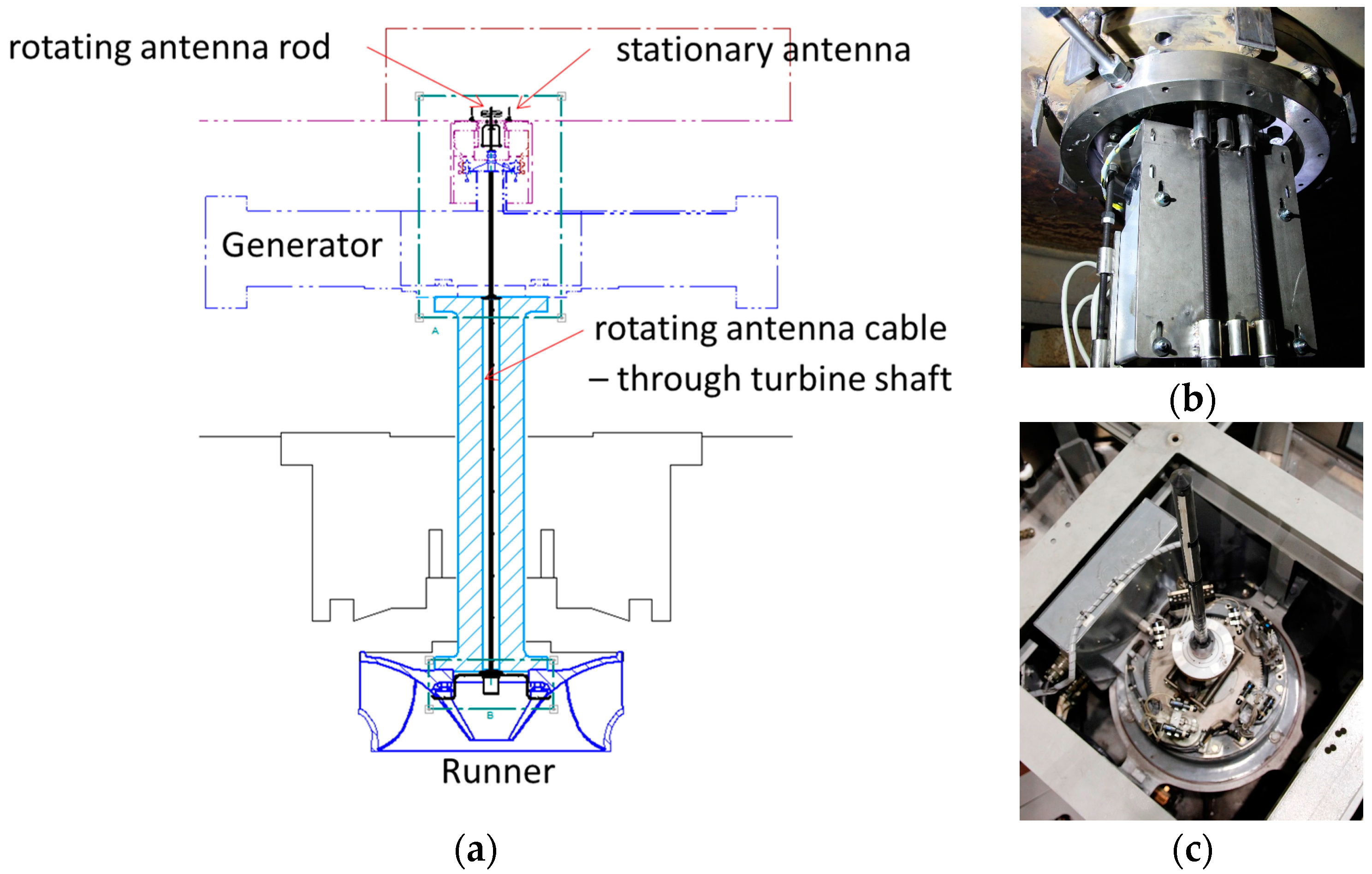
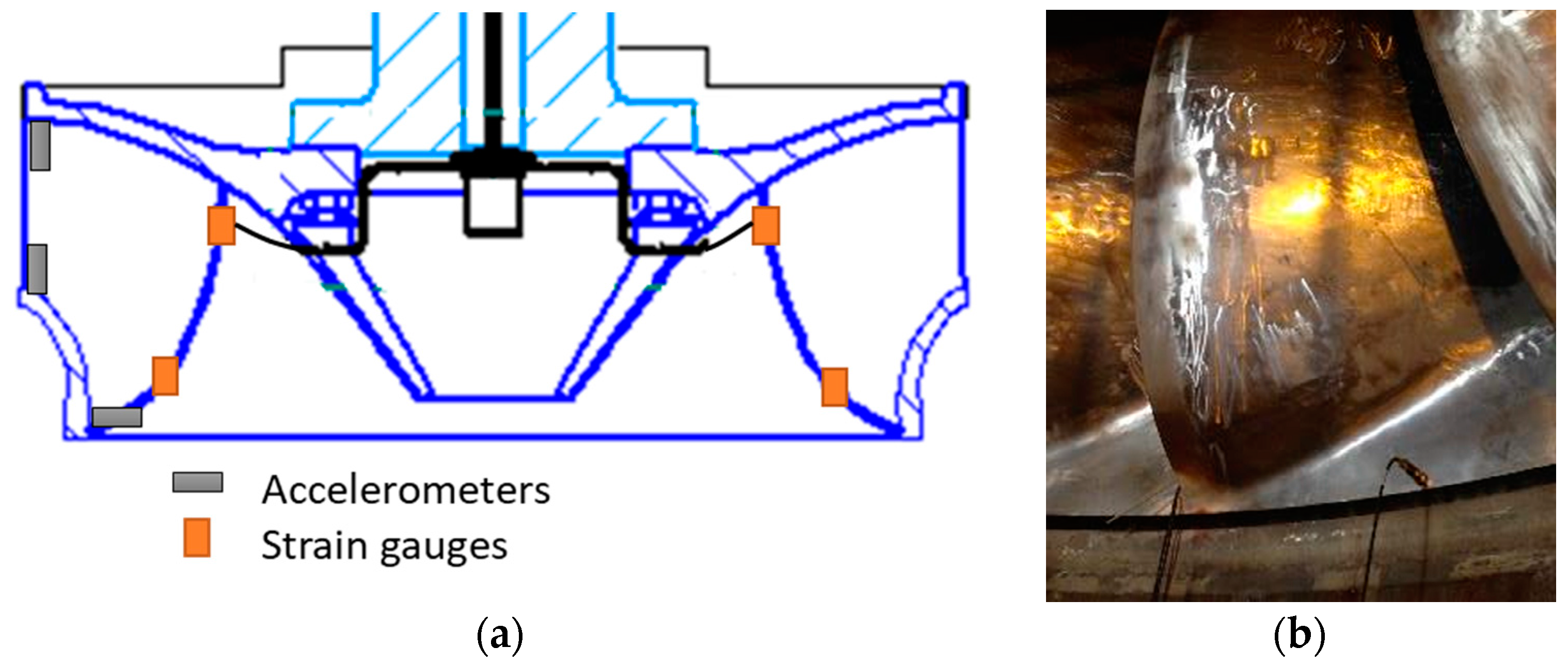
3.2. Instrumentation
3.3. Testing Procedure
- Start-up (duration of 1 min): the machine goes from standstill to the nominal speed (128.6 rpm).
- Speed no load (SNL): the machine turns at nominal speed but without generating energy (no excitation in the generator). Low periodic excitation due to RSI and important random excitation due to turbulence.
- Deep part load (DPL): very low flow, so the machine was generating between 5% and 30% the rated power. Low periodic excitation due to RSI and important random excitation due to turbulence.
- Part load (PL): between 30% and 70% of the rated power. Medium periodic excitation of the RSI and high periodic excitation due to part-load vortex rope.
- Best efficiency point (BEP): for the head during the test, this point was at 90% of the rated power. High periodic excitation due to the RSI.
- Overload (OL): Between 100% and 108% of the rated power. High periodic excitation due to the RSI and due to the overload vortex rope.
4. Signal Processing
4.1. Strain Modal Testing
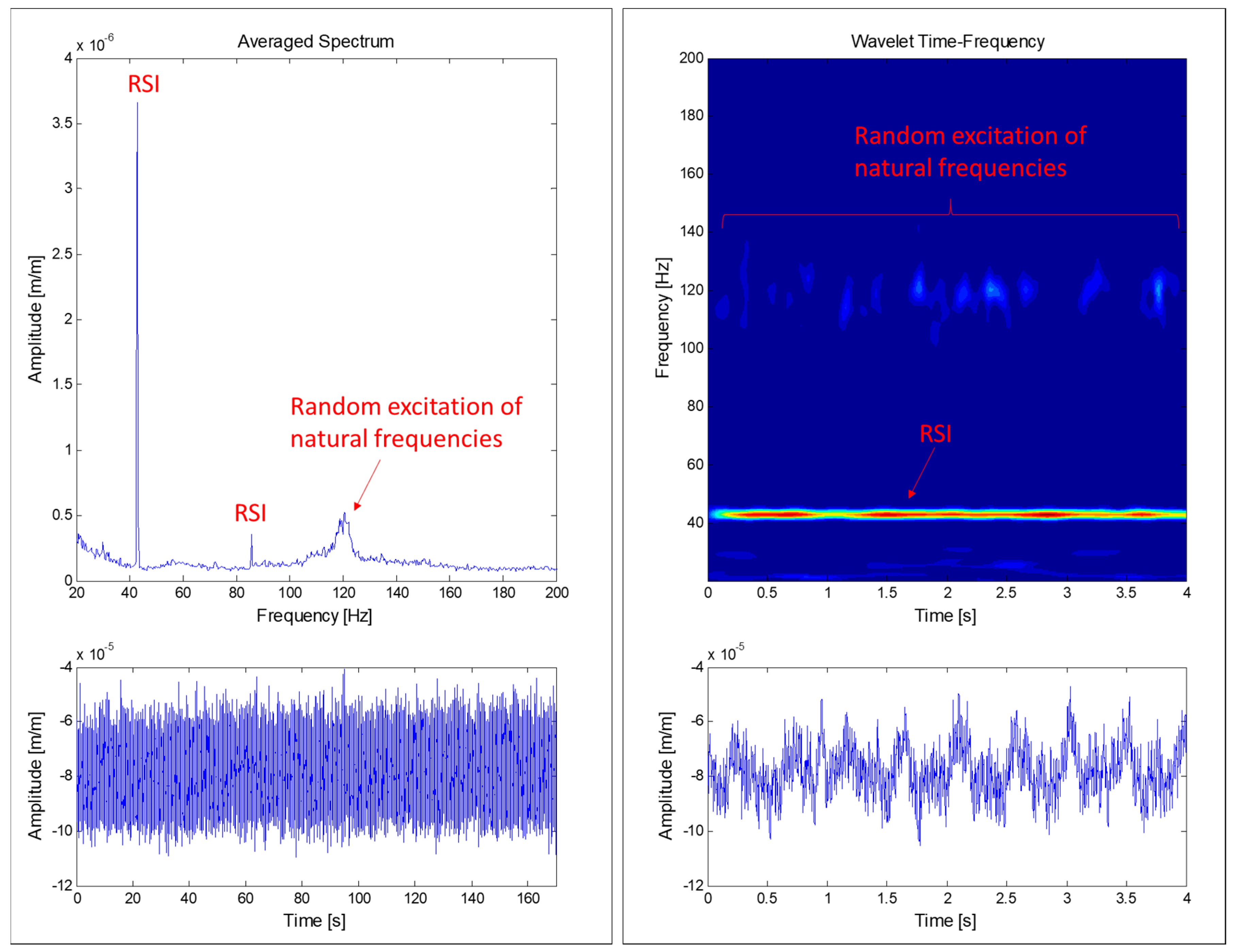
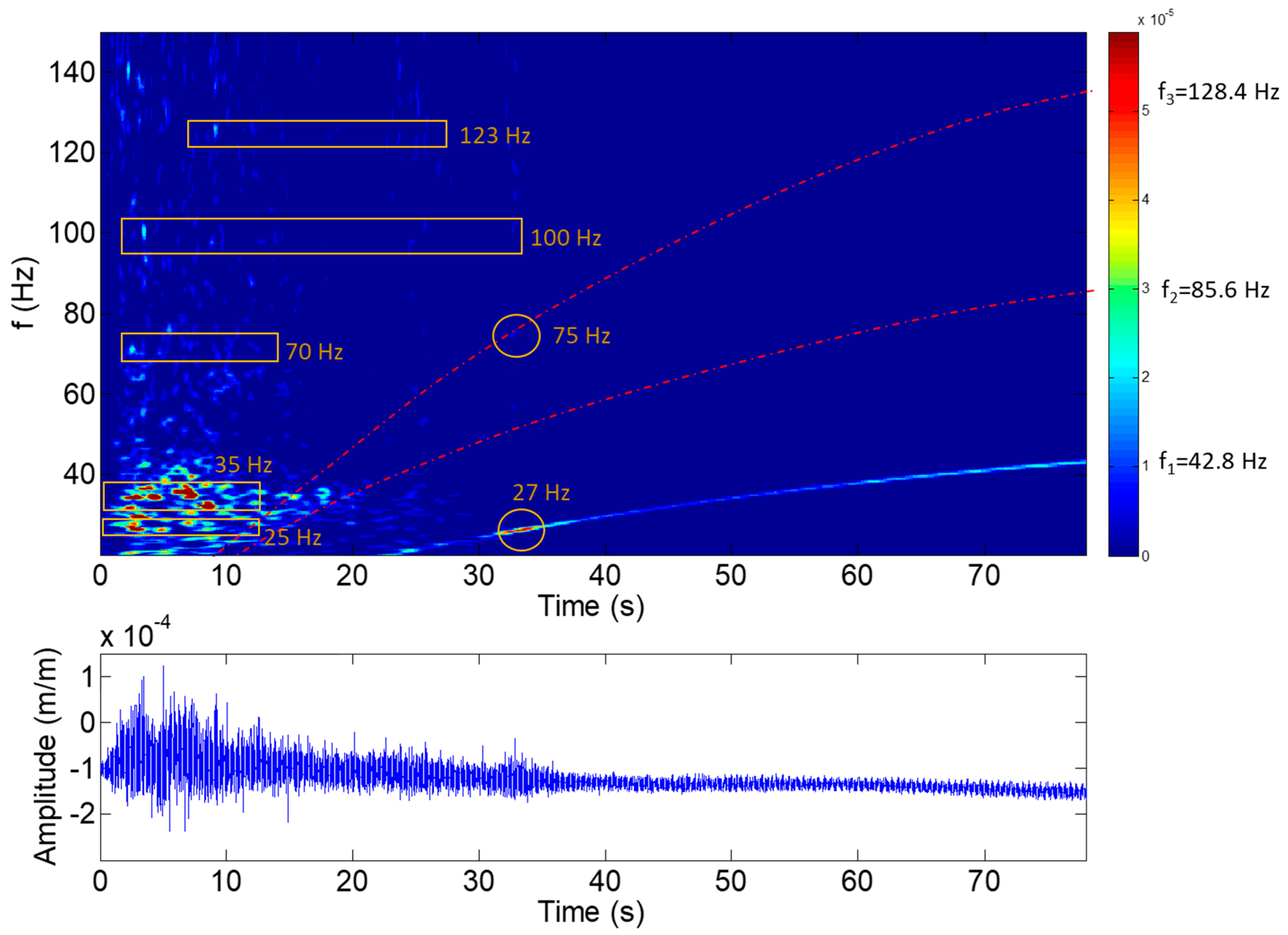
4.2. Joint Time–Frequency Analysis
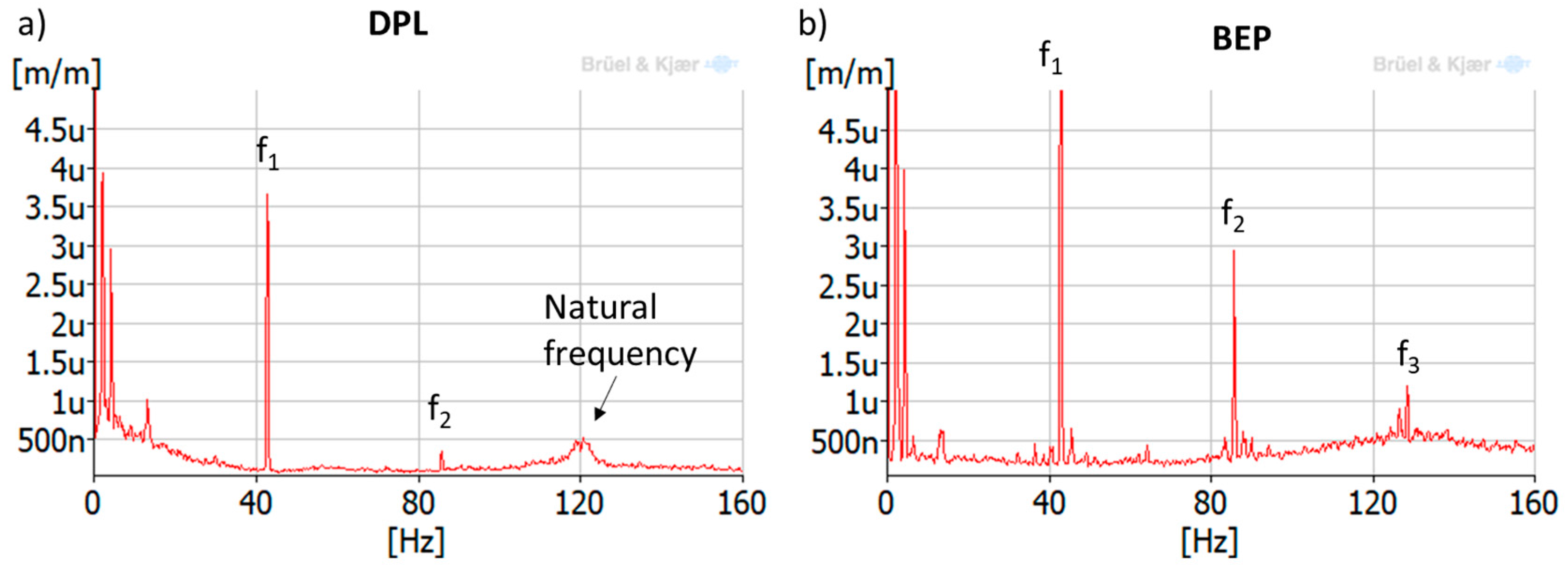
4.3. Averaged–Spectrum Analsysis
5. Results
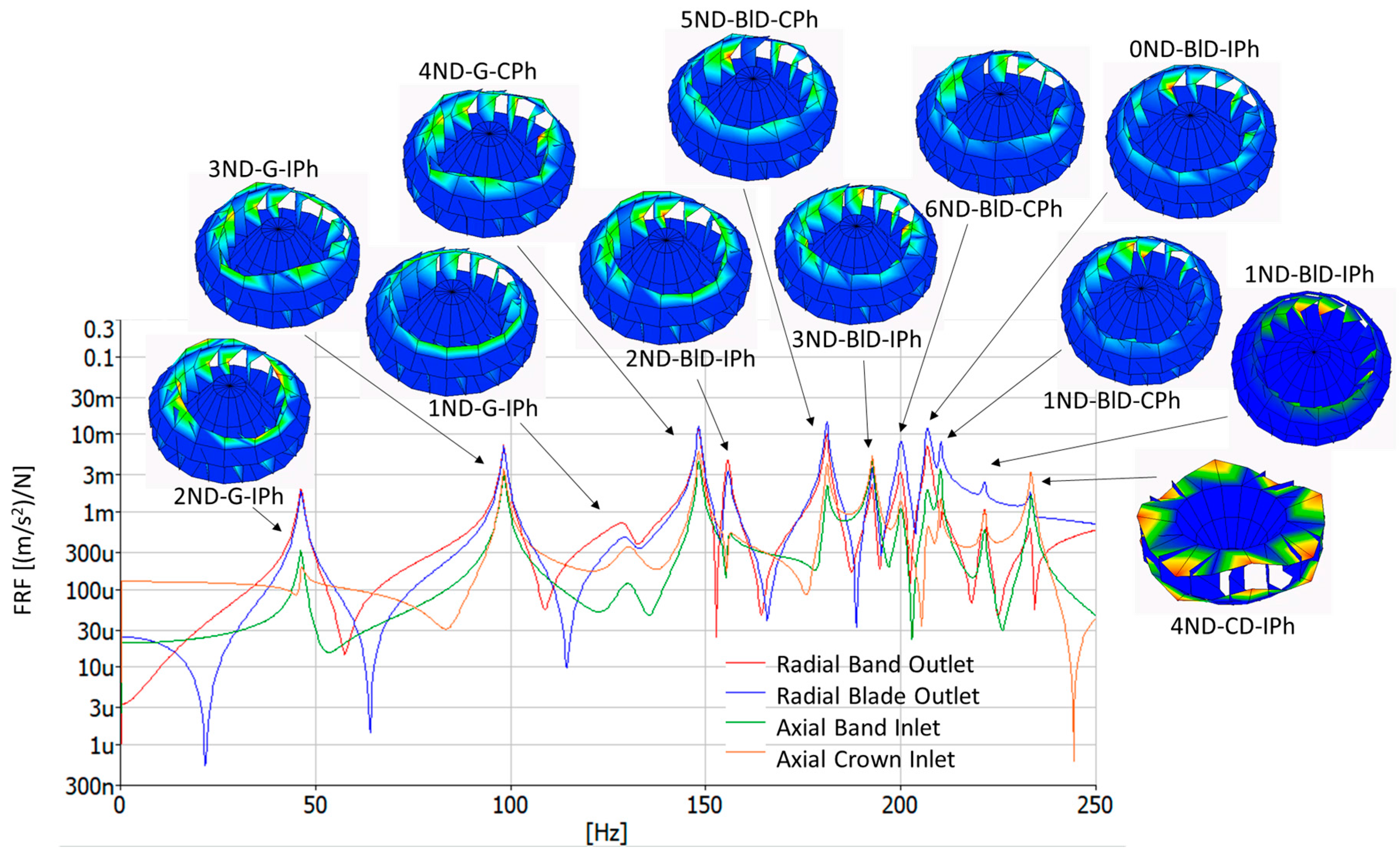
5.1. Natural Frequencies in Air
5.2. Natural Frequencies under Operating Conditions
5.2.1. Start-Up
5.2.2. Deep Part Load
5.2.3. Overload
6. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- International Energy Agency (IEA). Key World Energy Trends. Excerpt from: World Energy Balances; IEA: Paris, France, 2016.
- Huang, X.; Chamberland-Lauzon, J.; Oram, C.; Klopfer, A.; Ruchonnet, N. Fatigue Analyses of the Prototype Francis Runners Based on Site Measurements and Simulations. IOP Conf. Ser.: Earth Environ. Sci. 2014, 22, 012014. [Google Scholar] [CrossRef]
- Ohashi, H. Case Study of Pump Failure Due to Rotor-Stator Interaction. Int. J. Rotat. Mach. 1994, 1, 53–60. [Google Scholar] [CrossRef]
- Egusquiza, E.; Valero, C.; Huang, X.; Jou, E.; Guardo, A.; Rodriguez, C. Failure investigation of a large pump-turbine runner. Eng. Fail. Anal. 2012, 23, 27–34. [Google Scholar] [CrossRef] [Green Version]
- Trivedi, C. A review on fluid structure interaction in hydraulic turbines: A focus on hydrodynamic damping. Eng. Fail. Anal. 2017, 77, 1–22. [Google Scholar] [CrossRef]
- Egusquiza, E.; Valero, C.; Valentin, D.; Presas, A.; Rodriguez, C.G. Condition monitoring of pump-turbines. New challenges. Measurement 2015, 67, 151–163. [Google Scholar] [Green Version]
- Valentín, D.; Presas, A.; Egusquiza, E.; Valero, C. Experimental study on the added mass and damping of a disk submerged in a partially fluid-filled tank with small radial confinement. J. Fluids Struct. 2014, 50, 1–17. [Google Scholar] [CrossRef]
- Valentín, D.; Ramos, D.; Bossio, M.; Presas, A.; Egusquiza, E.; Valero, C. Influence of the Boundary Conditions on the Natural Frequencies of a Francis Turbine. IOP Conf. Ser.: Earth Environ. Sci. 2016, 49, 072004. [Google Scholar]
- Egusquiza, E.; Valero, C.; Presas, A.; Huang, X.; Guardo, A.; Seidel, U. Analysis of the dynamic response of pump-turbine impellers. Influence of the rotor. Mech. Syst. Sign. Process. 2016, 68, 330–341. [Google Scholar] [CrossRef]
- Liang, Q.W.; Rodríguez, C.G.; Egusquiza, E.; Escaler, X.; Farhat, M.; Avellan, F. Numerical simulation of fluid added mass effect on a francis turbine runner. Comput. Fluids 2007, 36, 1106–1118. [Google Scholar] [CrossRef]
- Egusquiza, E.; Valero, C.; Liang, Q.; Coussirat, M.; Seidel, U. Fluid Added Mass Effect in the Modal Response of a Pump-Turbine Impeller. In Proceedings of the ASME 2009 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, San Diego, CA, USA, 2 September 2009; American Society of Mechanical Engineers: New York, NY, USA, 2009; pp. 715–724. [Google Scholar]
- Presas, A.; Valentin, D.; Egusquiza, E.; Valero, C.; Seidel, U. Influence of the rotation on the natural frequencies of a submerged-confined disk in water. J. Sound Vib. 2015, 337, 161–180. [Google Scholar] [CrossRef]
- Presas, A.; Valentin, D.; Egusquiza, E.; Valero, C.; Seidel, U. On the detection of natural frequencies and mode shapes of submerged rotating disk-like structures from the casing. Mech. Syst. Sign. Process. 2015, 60, 547–570. [Google Scholar] [CrossRef] [Green Version]
- Mao, Z.; Wang, Z. Structural Characteristic in Prototype Runner of Francis Turbine Analysis. In Proceedings of the International Symposium on Transport Phenomena and Dynamics of Rotating Machinery, Honolulu, HI, USA, 10–15 April 2016. [Google Scholar]
- Gagnon, M.; Tahan, S.A.; Bocher, P.; Thibault, D. Impact of startup scheme on Francis runner life expectancy. IOP Conf. Ser.: Earth Environ. Sci. 2010, 12, 012107. [Google Scholar] [CrossRef]
- Nennemann, B.; Morissette, J.F.; Chamberland-Lauzon, J.; Monette, C.; Braun, O.; Melot, M.; Coutu, A.; Nicolle, J.; Giroux, A.M. Challenges in Dynamic Pressure and Stress Predictions at No-Load Operation in Hydraulic Turbines. IOP Conf. Ser.: Earth Environ. Sci. 2014, 22, 032055. [Google Scholar] [CrossRef]
- Kranjc, T.; Slavič, J.; Boltežar, M. The mass normalization of the displacement and strain mode shapes in a strain experimental modal analysis using the mass-change strategy. J. Sound Vib. 2013, 332, 6968–6981. [Google Scholar] [CrossRef]
- Mucchi, E. On the comparison between displacement modal testing and strain modal testing. Proc. Inst. Mech. Eng. Part C 2016, 230, 3389–3396. [Google Scholar] [CrossRef]
- Liu, X.; Luo, Y.; Wang, Z. A review on fatigue damage mechanism in hydro turbines. Renew. Sustain. Energy Rev. 2016, 54, 1–14. [Google Scholar] [CrossRef]
- Trivedi, C.; Cervantes, M.J. Fluid-structure interactions in Francis turbines: A perspective review. Renew. Sustain. Energy Rev. 2017, 68, 87–101. [Google Scholar] [CrossRef]
- Valentín, D.; Presas, A.; Egusquiza, E.; Valero, C.; Bossio, M. Dynamic Response of the MICA Runner. Experiment and Simulation. J. Phys.: Conf. Ser. 2017, 813, 012036. [Google Scholar]
- Rodriguez, C.G.; Egusquiza, E.; Escaler, X.; Liang, Q.W.; Avellan, F. Experimental investigation of added mass effects on a Francis turbine runner in still water. J. Fluids Struct. 2006, 22, 699–712. [Google Scholar] [CrossRef]
- Lais, S.; Liang, Q.; Henggeler, U.; Weiss, T.; Escaler, X.; Egusquiza, E. Dynamic Analysis of Francis Runners—Experiment and Numerical Simulation. Int. J. Fluids Mach. Syst. 2009, 2, 303–314. [Google Scholar] [CrossRef]
- Flores, M.; Urquiza, G.; Rodríguez, J.M. A fatigue analysis of a hydraulic Francis turbine runner. World J. Mech. 2012, 2, 28–34. [Google Scholar] [CrossRef]
- Woon, C.; Mitchell, L.D. Second International Conference on Vibration Measurements by Laser Techniques: Advances and Applications. In Temperature-Induced Variations in Structural Dynamic Characteristicspart II: Analytical; International Society for Optics and Photonics: Bellingham, WA, USA, 1996; pp. 58–70. [Google Scholar]
- Bossio, M.; Valentín, D.; Presas, A.; Martin, D.R.; Egusquiza, E.; Valero, C.; Egusquiza, M. Numerical study on the influence of acoustic natural frequencies on the dynamic behaviour of submerged and confined disk-like structures. J. Fluids Struct. 2017, 73, 53–69. [Google Scholar] [CrossRef]
- Jazar, R.N. Advanced Vibrations: A Modern Approach; Springer: Berlin, Germany, 2005. [Google Scholar]
- Tanaka, H. Vibration behavior and dynamic stress of runners of very high head reversible pump-turbines. Int. J. Fluid Mach. Syst. 2011, 4, 289–306. [Google Scholar] [CrossRef]
- Nicolet, C.; Ruchonnet, N.; Avellan, F. One-Dimensional Modeling of Rotor Stator Interaction in Francis Turbine. In Proceedings of the 23rd IAHR Symposium, Yokohama, Japan, 17–21 October 2006; IAHR: Yokohama, Japan, 2016. [Google Scholar]
- Dubas, M. Über die Erregung infolge der Periodizität von Turbomaschinen. M. Ing. Arch. 1984, 54, 413–426. [Google Scholar] [CrossRef]
- Rodriguez, C.G.; Mateos-Prieto, B.; Egusquiza, E. Monitoring of Rotor-Stator Interaction in Pump-Turbine Using Vibrations Measured with On-Board Sensors Rotating with Shaft. Shock Vib. 2014, 2014, 8. [Google Scholar] [CrossRef]
- Rodriguez, C.G.; Egusquiza, E.; Santos, I.F. Frequencies in the Vibration Induced by the Rotor Stator Interaction in a Centrifugal Pump Turbine. J. Fluids Eng. 2007, 129, 1428–1435. [Google Scholar] [CrossRef]
- Presas, A.; Egusquiza, E.; Valero, C.; Valentin, D.; Seidel, U. Feasibility of Using PZT Actuators to Study the Dynamic Behavior of a Rotating Disk due to Rotor-Stator Interaction. Sensors 2014, 14, 11919–11942. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Escaler, X.; Egusquiza, E.; Farhat, M.; Avellan, F.; Coussirat, M. Detection of cavitation in hydraulic turbines. Mechan. Syst. Sign. Process. 2006, 20, 983–1007. [Google Scholar] [CrossRef]
- Kumar, P.; Saini, R.P. Study of cavitation in hydro turbines—A review. Renew. Sustain. Energy Rev. 2010, 14, 374–383. [Google Scholar] [CrossRef]
- Valentín, D.; Presas, A.; Egusquiza, E.; Valero, C.; Egusquiza, M.; Bossio, M. Power Swing Generated in Francis Turbines by Part Load and Overload Instabilities. Energies 2017, 10, 2124. [Google Scholar] [CrossRef]
- Presas, A.; Valentin, D.; Egusquiza, E.; Valero, C. Detection and Analysis of Part Load and Full Load Instabilities in a Real Francis Turbine Prototype. J. Phys.: Conf. Ser. 2017, 813, 012038. [Google Scholar] [CrossRef]
- Ewins, D.J. Modal Testing: Theory and Practice; Research Studies Press: Letchworth, UK, 1984; p. 15. [Google Scholar]
- Grein, H. Vibration Phenomena in Francis Turbines: Their Causes and Prevention. In Proceedings of the 10th IAHR Symposium in Hydraulic Machinery Equipments and Cavitation, Tokyo, Japan, 28 September–2 October 1980; pp. 527–539. [Google Scholar]
- Aguila, H.; Egusquiza, E.; Jou, E.; Estevez, A.; Cabrera, J. Detection of Rotor Natural Frequencies in Hydro Powerplants. In Proceedings of the 9th International Meeting of the Working Group on the Behaviour of Hydraulic Machinery under Steady Oscillatory Conditions, Brno, Czech Republic, 7–9 September 1999; IAHR: Brno, Czech Republic, 1999. [Google Scholar]
- Weber, W.; von Locquenghien, F.; Conrad, P.; Koutnik, J. Dynamic Stresses in a Francis Model Turbine at Deep Part Load. J. Phys.: Conf. Ser. 2017, 813, 012014. [Google Scholar] [CrossRef]
- Morissette, J.; Chamberland-Lauzon, J.; Nennemann, B.; Monette, C.; Giroux, A.; Coutu, A.; Nicolle, J. Stress Predictions in a Francis Turbine at No-Load Operating Regime. IOP Conf. Ser.: Earth Environ. Sci. 2016, 49, 072016. [Google Scholar] [CrossRef]
- De La Torre, O.; Escaler, X.; Egusquiza, E.; Farhat, M. Experimental investigation of added mass effects on a hydrofoil under cavitation conditions. J. Fluids Struct. 2013, 39, 173–187. [Google Scholar] [CrossRef]
- I HYdropower Plants PERformance and Flexible Operation towards Lean Integration of New Renewable Energies. Available online: https://hyperbole.epfl.ch (accessed on 15 September 2017).
- Newland, D.E. Wavelet Analysis of Vibration: Part 1—Theory. J. Vib. Acoust. 1994, 116, 409–416. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| mZv/nZb | 20 (f1 = 42.8 Hz) | 40 (f2 = 85.6 Hz) | 60 (f3 = 128.4 Hz) | 80 (f4 = 171.2 Hz) |
|---|---|---|---|---|
| 16 | −4 | −24 | −44 | −64 |
| 32 | 12 | −8 | −28 | −48 |
| 48 | 28 | 8 | −12 | −32 |
| 64 | 44 | 24 | 4 | −16 |
| 80 | 60 | 40 | 20 | 0 |
| Mode-Shape Number | Mode-Shape Name | fn [Hz] | Damping Ratio [%] |
|---|---|---|---|
| 1 | 2ND-G-IPh | 46.44 | 1.0272 |
| 2 | 3ND-G-IPh | 98.24 | 0.5498 |
| 3 | 1ND-G-IPh | 129.14 | 2.4669 |
| 4 | 4ND-G-CPh | 148.08 | 0.3094 |
| 5 | 2ND-BlD-IPh | 155.58 | 0.3469 |
| 6 | 5ND-BlD-CPh | 181.03 | 0.2713 |
| 7 | 3ND-BlD-IPh | 192.48 | 0.2394 |
| 8 | 6ND-BlD-CPh | 197.89 | 0.2894 |
| 9 | 0ND-BlD-IPh | 206.85 | 0.2490 |
| 10 | 1ND-BlD-CPh | 209.38 | 0.2413 |
| 11 | 1ND-BlD-IPh | 216.99 | 0.8927 |
| 12 | 4ND-CD-IPh | 233.25 | 0.2550 |
| Frequency Detected in Operation (Hz) | Start-Up | DPL | OL | Mode Shape | fair (Hz) | fwater/fair |
|---|---|---|---|---|---|---|
| 28 | Yes | Yes | Yes | 2ND-G-IPh | 46.44 | 0.6029 |
| 35 | Yes | No | Yes | - | - | |
| 75 | Yes | No | Yes | 4ND-G-CPh | 148.08 | 0.5065 |
| 100 | Yes | No | Yes | - | - | |
| 123 | Yes | Yes | Yes | 4ND-CD-IPh | 233.25 | 0.5273 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Valentín, D.; Presas, A.; Bossio, M.; Egusquiza, M.; Egusquiza, E.; Valero, C. Feasibility of Detecting Natural Frequencies of Hydraulic Turbines While in Operation, Using Strain Gauges. Sensors 2018, 18, 174. https://doi.org/10.3390/s18010174
Valentín D, Presas A, Bossio M, Egusquiza M, Egusquiza E, Valero C. Feasibility of Detecting Natural Frequencies of Hydraulic Turbines While in Operation, Using Strain Gauges. Sensors. 2018; 18(1):174. https://doi.org/10.3390/s18010174
Chicago/Turabian StyleValentín, David, Alexandre Presas, Matias Bossio, Mònica Egusquiza, Eduard Egusquiza, and Carme Valero. 2018. "Feasibility of Detecting Natural Frequencies of Hydraulic Turbines While in Operation, Using Strain Gauges" Sensors 18, no. 1: 174. https://doi.org/10.3390/s18010174
APA StyleValentín, D., Presas, A., Bossio, M., Egusquiza, M., Egusquiza, E., & Valero, C. (2018). Feasibility of Detecting Natural Frequencies of Hydraulic Turbines While in Operation, Using Strain Gauges. Sensors, 18(1), 174. https://doi.org/10.3390/s18010174