2.1. Identity Authentication Based on Motion Sensors
Currently, the application of motion sensor is mainly for Human Activity Recognition (HAR). Janidarmian et al. [
10] presented a comprehensive analysis on a wearable acceleration sensor for HAR. They examined the accuracy performance with respect to common machine learning algorithms and versatility with respect to 14 well-known benchmark datasets and different types of acceleration sensors. Also, deep learning algorithms were applied for HAR and proved to be highly precise [
11,
12,
13].
Research on authentication by motion sensors is relatively new. Recently, with the increasing capability of smartphones, Ehatishamulhaq et al. [
14] used the embedded motion sensors of smartphone for users’ authentication. They applied several classifiers to recognize different activities, then authenticated the identity of a user based on the prior knowledge of their motion states. The experiments showed an authentication accuracy rate of 91.67%. Shen et al. [
15] used smartphone accelerometers and orientation sensors to authenticate a user through the action of passcode input. They utilized different levels of the user’s posture and of the smartphone changes of motion as distinctive characteristics. By employing three common machine learning algorithms (SVM, Supported Vector Machine), Neural Network, and Nearest-Neighbor), the experiments showed a false rejection rate (FRR) of 6.85% and a false acceptance rate (FAR) of 5.01%. Conti et al. [
16] used a similar method and exploited the differences in the way of answering the phone. Through the process of Dynamic Time Warping (DTW), their experiments showed an impostor pass rate of 4.5% and a false acceptance rate of 9.5%. However, most smartphone authentication methods belong to the static authentication type and check the user’s identity only once at login. In addition, some work did not examine the differences in the raw data when the same user performed the same movement in different periods of time, which may introduce variations.
The works mentioned above showed the application of smartphone built-in motion sensors to achieve user authentication. Also, some studies focused on body-worn motion sensors to achieve authentication. Xu et al. [
17] proposed a face recognition method for smart glass based on both camera and Inertial Measurement Unit (IMU) sensors. They utilized the angle information collected from IMU sensors to improve the recognition accuracy. The results showed an improvement of accuracy of 15% under the same computation cost of other methods. Zhang et al. [
18] used gait as the biometric for identity recognition. To avoid the cycle detection failure, a novel multiscale Signature Points (SP) extraction method was proposed for recognition. The recognition rate reached 95.8% by using five accelerometers on different body locations. Zeng et al. [
19] shared similar thoughts with us. They investigated the possibility of using dynamic behavior as a unique marker of users to design an implicit authentication framework for wearable devices. The rationale behind their work is the unique pattern of every user when they perform specific activities. Firstly, they built an activity classifier to distinguish four simple activities, namely, walking, running, climbing, and jumping, and then, they built an activity-specific authentication model. Also, different placements of the motion sensor were considered. The experiments showed the lowest false-positive rate of 0.3% when the walking state was detected correctly. Cola et al. [
20] used motion data collected from a user’s wrist for authentication. A detection algorithm was proposed to discern whether a user was walking or not, and an anomaly detection method was used to distinguish genuine inputs from unauthorized users. Their results showed an equal error rate (EER) of 2.9% in an experiment with 15 volunteers. Xu et al. [
21] reduced the power consumption of an accelerometer by utilizing the output voltage signal from a kinetic energy harvester (KEH). They used the unique patterns from wearable KEH devices for authentication. The results showed that the power consumption was reduced by 78.5% while the accuracy was 6% lower.
We can infer that most gait authentication schemes provided a continuous authentication solution which verified the identity unobtrusively throughout the usage period. However, most of the works required that the user remained in a kinetic state, which could not provide authentication when the user was in a stationary state.
2.2. Identity Authentication Based on Physiological Sensors
Because of the unique and hard-forged characteristics of human biology, biometrics has emerged as a novel and robust technology in many verification tasks. At present, biometric verification methods based on fingerprint [
22], face [
23], and voice [
24] have been used widely and proved to have relatively high accuracy. Yet, recent study showed that the above methods forged security risks [
9,
25]. Scientists have proposed to use other unique characteristics like, among others, ear [
26], vein [
27], odor [
28], electroencephalograph (EEG) [
29], electrocardiogram (ECG) [
30], and photoplethysmography (PPG) [
31]. However, some biometrics, such as vein, odor, and EEG, are hard to integrate into wearable devices. Since this paper is mainly focused on wearable sensors, we will mainly describe body-worn biometric devices.
Nakanishi et al. [
32] verified the authentication performance of intrabody propagation signals. However, the accuracy was low because of the influence of white noise. Li et al. [
33] used the transmission gain S21 as a biometric trait for personal verification. The emission electrode and receiving electrode were placed on a volunteer’s forearm. They also proposed a threshold adaptive template-matching method based on Euclidean distance which achieved a false acceptance rate of 5.79% and a false rejection rate of 6.74%. However, they tested only in the laboratory without considering the interference of external electromagnetic signals.
Usually, users have to carry a bulky instrument for continuous ECG monitoring. With the rapid development of microsensors and microprocessors, a small-size, compact wearable ECG sensor were made recently [
34]. Camara et al. [
35] utilized ECG signals for user identification. A k-NN algorithm was applied after non-fiducial feature extraction via Hadamard Transform. The experiments showed an accuracy rate of 97% and an error rate around 10%. A similar idea was presented in [
36]. The researchers performed a multi-class SVM by using kernel function after Discrete Wavelet Transform (DWT). The results showed a false match rate around 3.97%. Although these works have shown a great potential for ECG-based authentication, the prerequisite was that the wearer remained stationary, under low levels of environmental noise. Kang et al. [
37] collected the ECG signal through wearable watches and experimented under high levels of noise. The results showed a false acceptance rate of 5.2% and a false rejection rate of 1.9%. However, they kept the user in a particular state of motion, which limited the practical application. These efforts described above showed that the ECG sensors have a rich potential for user authentication. However, the ECG equipment still needs to be attached to the chest or to both hands, which is not convenient when the user is moving.
The utilization of PPG signals has also been proved to be a novel way for biometric authentication. Da et al. [
38] placed a PPG signal collector on the fingertip of the subject and applied DTW for measuring the similarity between the sample and a template. The results showed a FAR of 2% and a FRR of 10% under the optimal threshold. Spachos et al. [
39] applied the Linear Discriminant Analysis as an extraction tool and the Nearest-Neighbor as a classifier. The results showed a FAR of 5% and a FRR of 30%. However, the subjects were required to remain static and breath evenly, which is unrealistic. Ohtuski et al. [
40] used a wrist-worn PPG sensor to measure the waveform of different wrist movements, like flicking. They then extracted nine time-domain features for Random Forest Classifier. Yet, the user was required to stay still for five seconds, which was obtrusive, and the wrist-worn PPG sensor could not acquire accurate raw data.
As described above, single-sensor certifications cannot provide yet high accuracy and extensive applicability simultaneously. To our knowledge, few papers have addressed the analysis of continuous authentication using data from both kinetic sensors and biometric sensors. Miao et al. [
41] provided a wearable ECG monitoring system integrated with the built-in motion sensors of a smartphone. They installed the ECG acquisition device on the user’s chest to get ECG raw data and transmit it to a smartphone via Bluetooth. Meanwhile, the smartphone applied the activity recognition method based on the built-in motion sensors. This system could analyze ECG abnormal patterns with a prior knowledge of the motion state. However, it was used in medical diagnosis instead of authentication, and, in addition, the ECG device installed on the chest was uncomfortable for the user. Similarly, Kos et al. [
42] recorded the data from an inertial sensor and a PPG sensor to detect and examine tennis gestures for training purposes. The device was portable and easily wearable, yet their research included just raw data analysis and only applied some simple feature extraction methods.
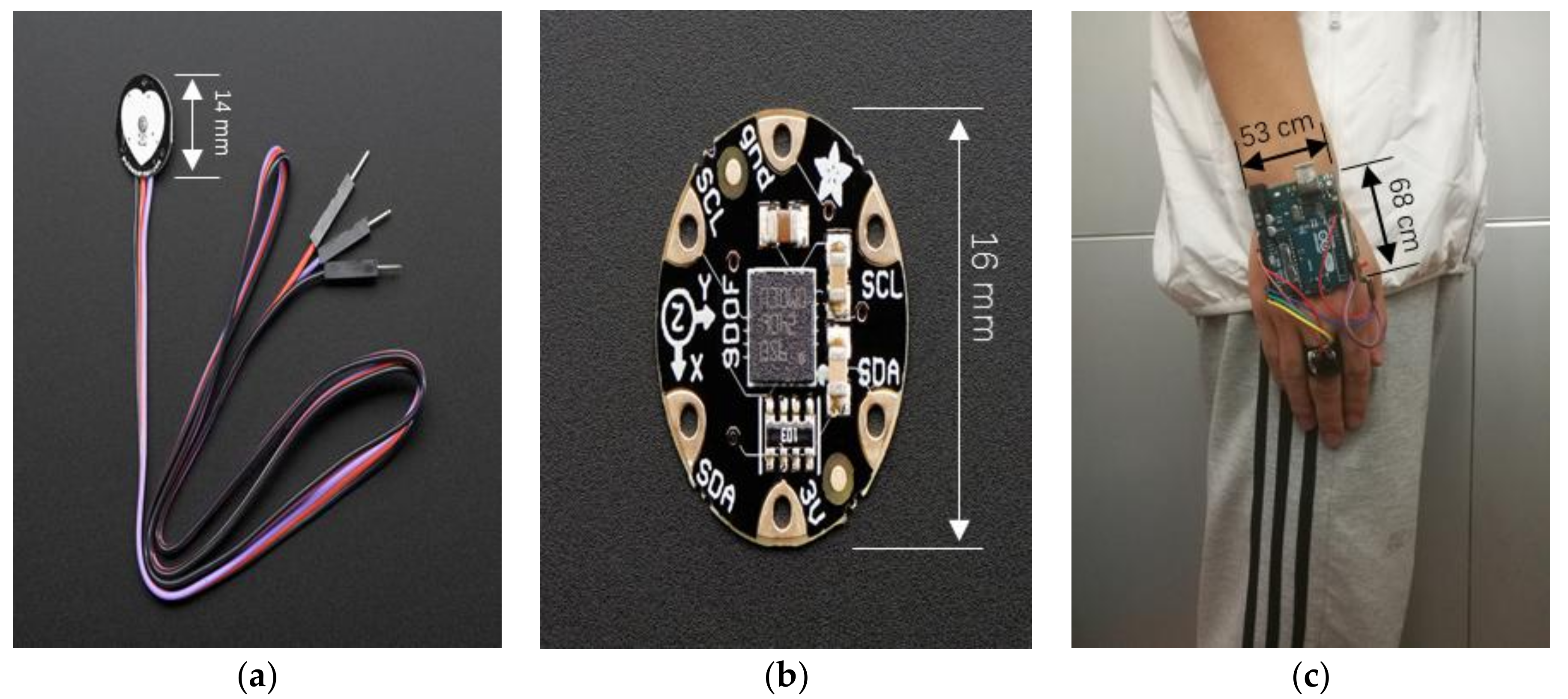
In general, wearable sensors have shown a great potential for identity authentication, yet there are still several problems and deficiencies, such as low precision, discomfort of wearing a sensor, and application restrictions. Thus, we combined motion sensors and a physiological sensor to achieve high-precision authentication. The motion sensors included an accelerometer and a gyroscope, and the physiological sensor included a PPG sensor. We chose PPG instead of ECG because it could supply measures through a single finger. Because the PPG signal is affected by body movements, the system firstly applies an activity recognition method to detect whether the wearer is doing relatively strenuous movements or not, then it authenticates the user under slow motion and stationary state. Compared to the existing works, this study: (1) aims to provide a high-precision authentication system using both motion sensors (accelerometer and gyroscope) and a physiological sensor (PPG signal); (2) achieves continuous authentication with a small-size, light fingertip device which collects raw data automatically; (3) employs a low computational classification algorithm for activity recognition. We considered three categories for classification: slowly walking, sitting, and strenuous movements, including trotting and ascending and descending stairs; (4) employs a one-class classifier to build the authentication model. More specifically, we used PPG and motion data to accomplish authentication during a slow walking state and used PPG solely during a stationary state; (5) examines a set of classifiers both for activity recognition and for identity authentication.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












