Social Incentive Mechanism Based Multi-User Sensing Time Optimization in Co-Operative Spectrum Sensing with Mobile Crowd Sensing


Abstract
:1. Introduction
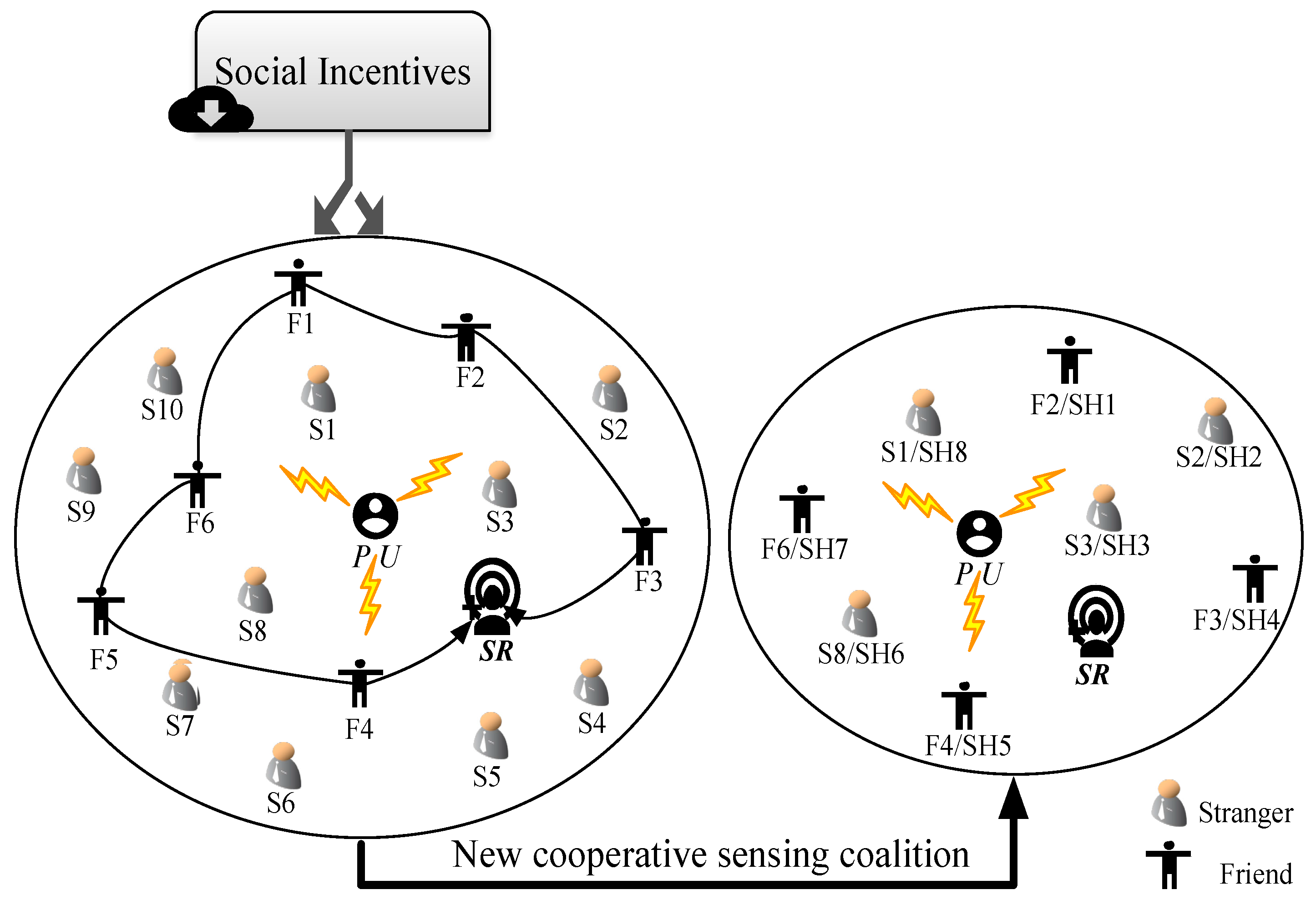
- We apply the advanced MCS into the co-operative spectrum sensing where not only the existing secondary users in current sensing system but also a crowd of widely distributed mobile users equipped with personal sensors can be regarded as the sufficient candidate co-operative sensing users. Furthermore, considering the individual rationality of each social man, we also adopt the social incentive mechanism to motivate the sensing participation of mobile users where a social reward, including community recognition, community membership and new friends and evaluated reputation can be obtained by each SH within the co-operative coalition. Compared with existing researches focusing on the co-operative spectrum sensing, the contributions address the issue that current secondary users may be insufficient and the sensing users will not voluntarily join in the co-operative spectrum sensing coalition due to the increasing sensing consumption.
- We propose co-operative game based multi-user sensing time optimization model where each SH acting as a player adjust its own sensing time strategy to maximize the co-operative sensing utility taking account of both the co-operative detection performance and the global sensing cost. Compared with existing researches considering only one secondary user or non-co-operative users in the issue of sensing time optimization, this contribution comes to be more realistic and can be widely applied into the improvement of the co-operative detection performance by jointly optimizing the sensing time strategies of all co-operative sensing users.
- We adopt an improved differential evolution algorithm to solve the game based multi-user sensing time optimization problem, which has been proven a NP-hard problem with a unique equilibrium strategy profile. A dynamically adjusting differential weight is proposed in the algorithm. Compared with the two typical equilibrium solution algorithms (i.e., the best response dynamic and fictitious play algorithms), the contributed algorithm can obtain a better co-operative utility (i.e., a better sub-optimal solution) due to the capability of searching a larger scale of candidate solutions and preventing trapping in a local optimum.
2. System Model
3. Social Incentive Mechanism Based Multi-User Sensing Time Optimization
3.1. Properties and Proofs
3.2. Algorithm Descriptions
| Algorithm 1. Improved DE based energy-efficient joint sensing time optimization. |
| Input: Population: ; Dimension: ; Generation: |
| Initialization: |
| 1. ; ; |
| 2. for to , do |
| 3. for to , do |
| 4. ; |
| 5. end |
| 6. end |
| While , do |
| Mutation Operation: |
| 7. for to , do |
| 8. for to , do |
| 9. , |
| , ; |
| 10. if , |
| 11. ; |
| 12. else |
| 13. ; |
| 14. end |
| 15. end |
| 16. end |
| Crossover Operation: |
| 17. for to , do |
| 18. for to , do |
| 19. if or , |
| 20. ; |
| 21. else |
| 22. ; |
| 23. end |
| 24. end |
| 25. end |
| Greedy Selection: |
| 26. for to , do |
| 27. for to , do |
| 28. if |
| 29. ; |
| 30. else |
| 31. ; |
| 32. end |
| 33. end |
| 34. compute ; |
| 35. end |
| 36. , ; |
| 37. ; |
| end |
| Output: The best strategy profile |
| 38. Sort , in descending order and extract all of the corresponding Generation indexes into the vector |
| 39. for to , do |
| 40. if |
| 41. ; |
| 42. break; |
| 43. else |
| 44. ; |
| 45. end |
| 46. end |
| 47. Obtain the best sensing time strategy profile |
4. Simulation Results
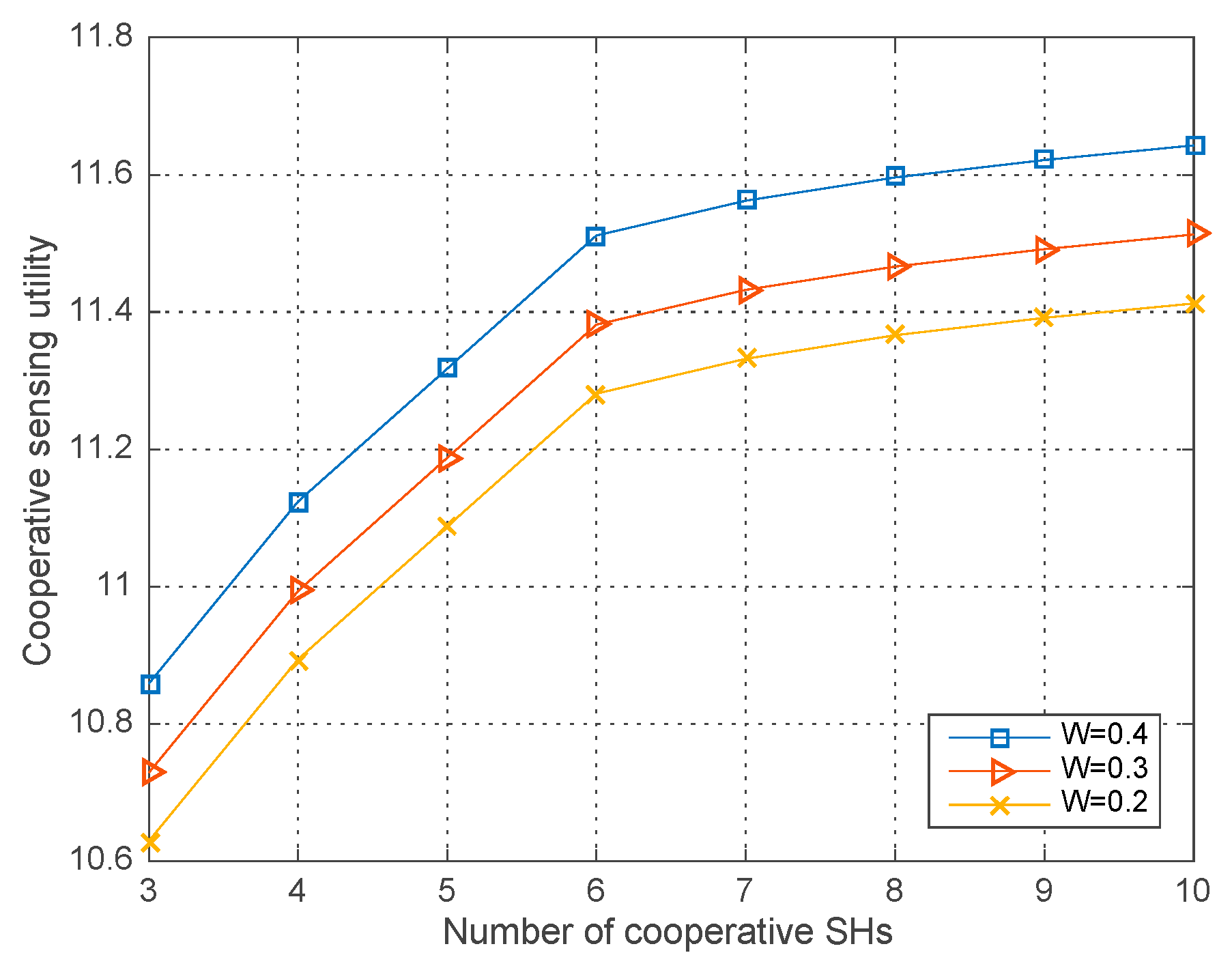
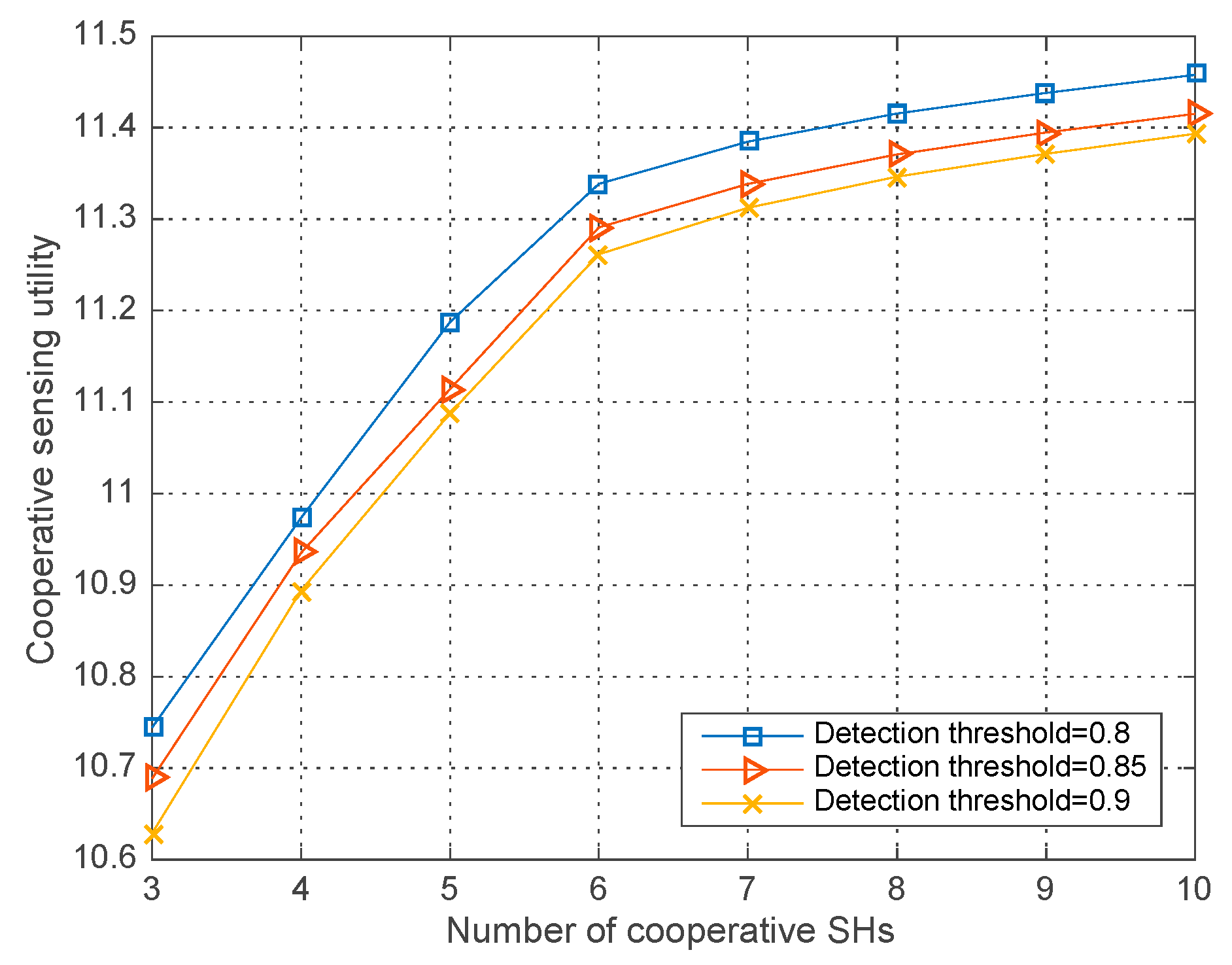
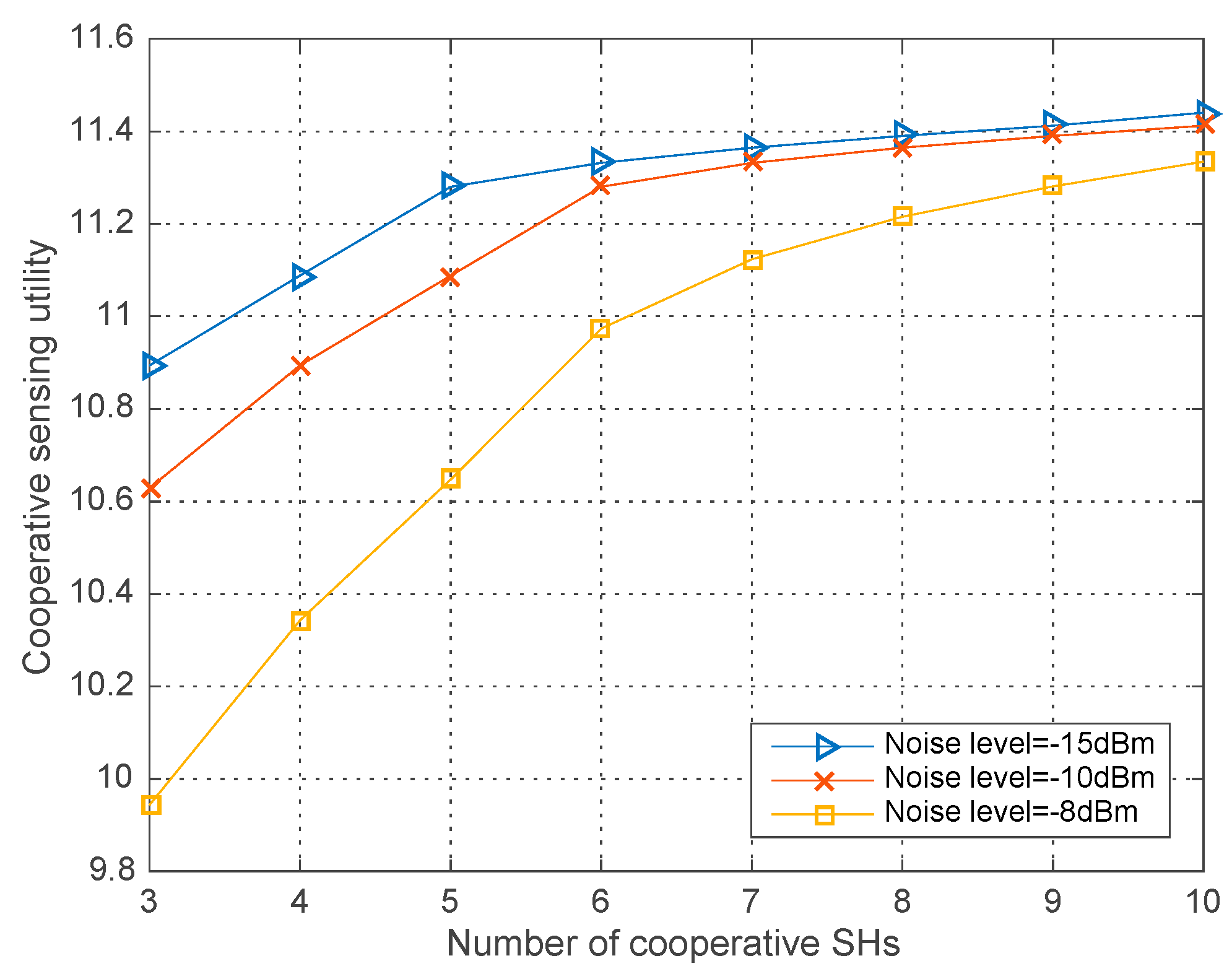
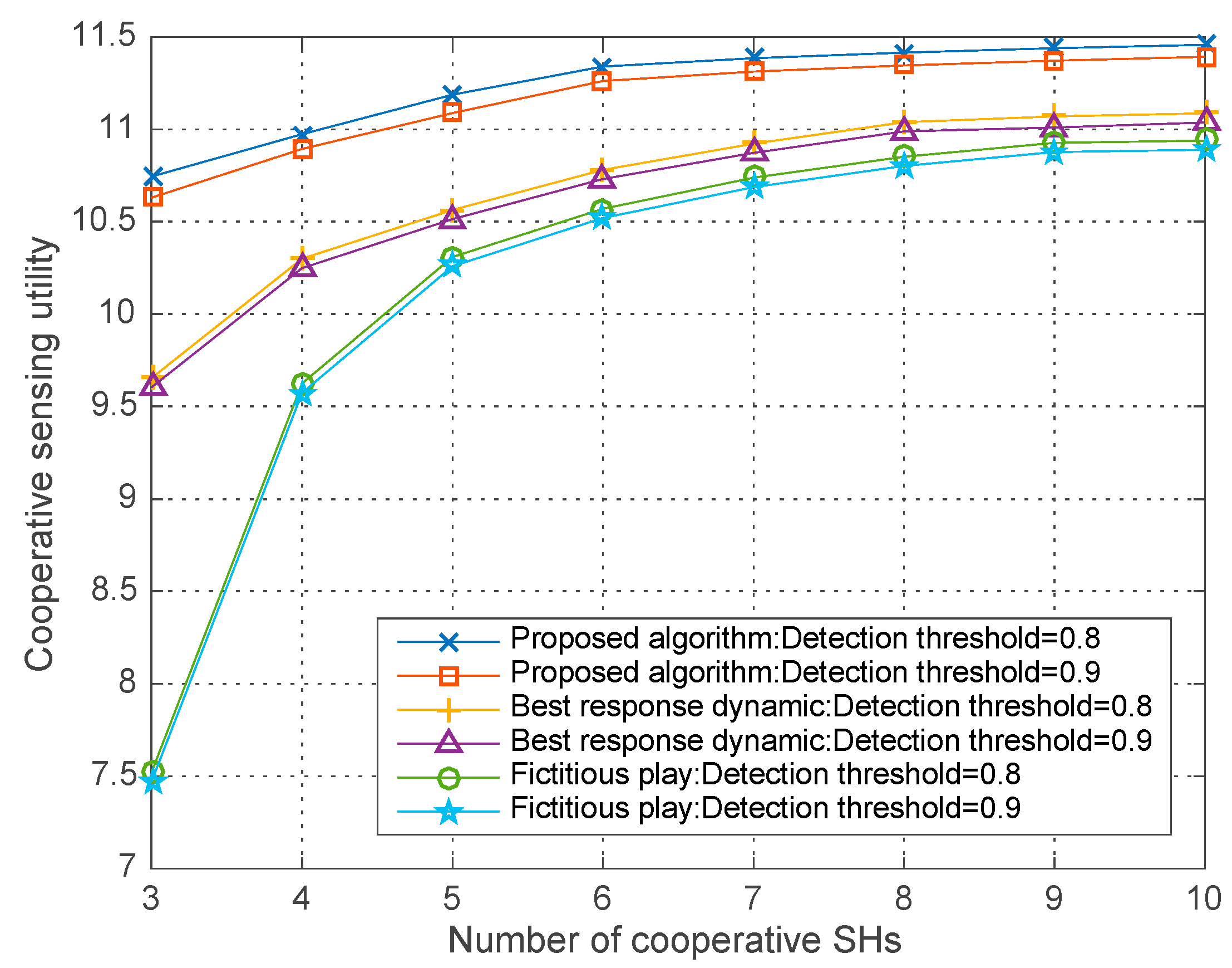
4.1. Performance with Different Parameters
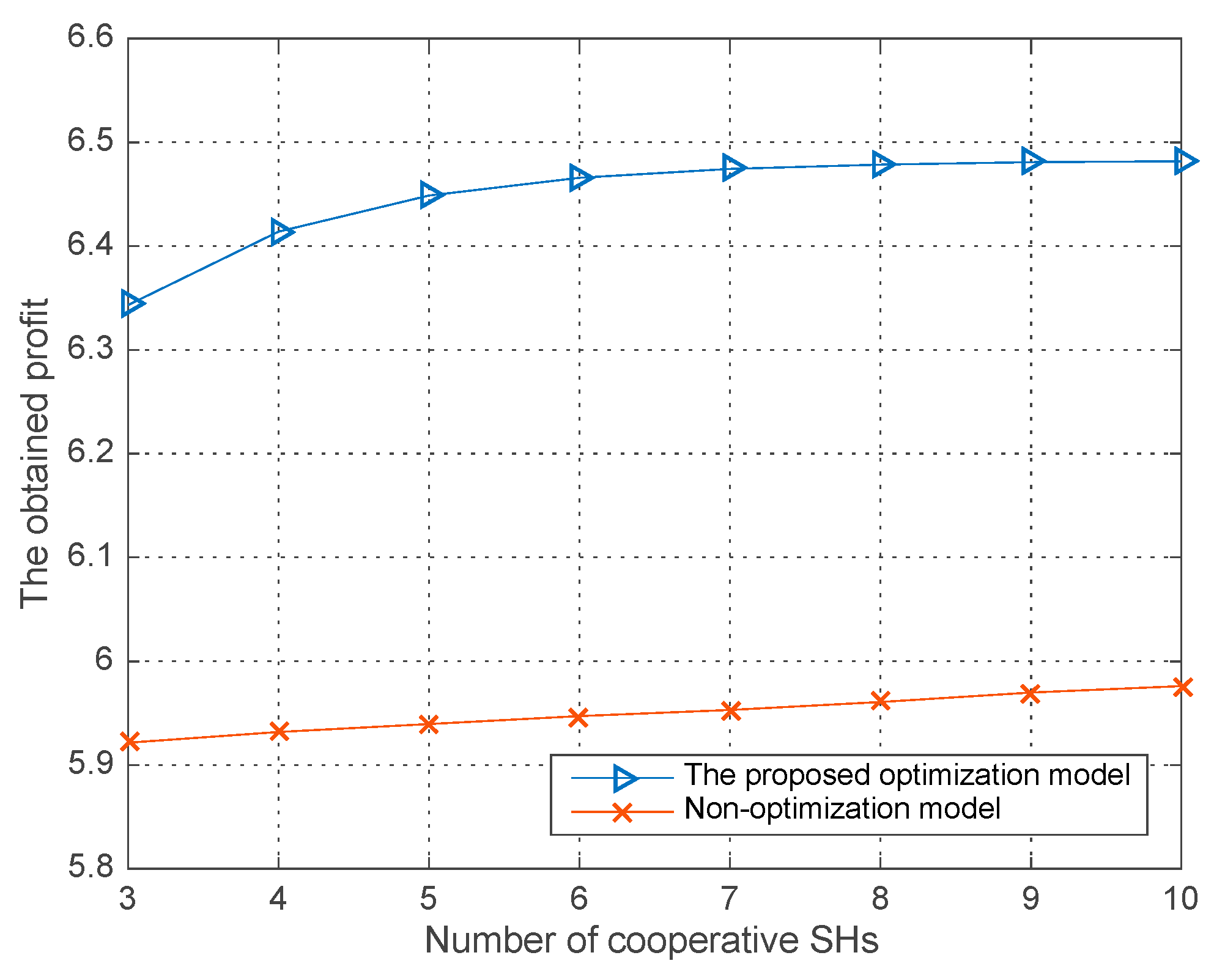
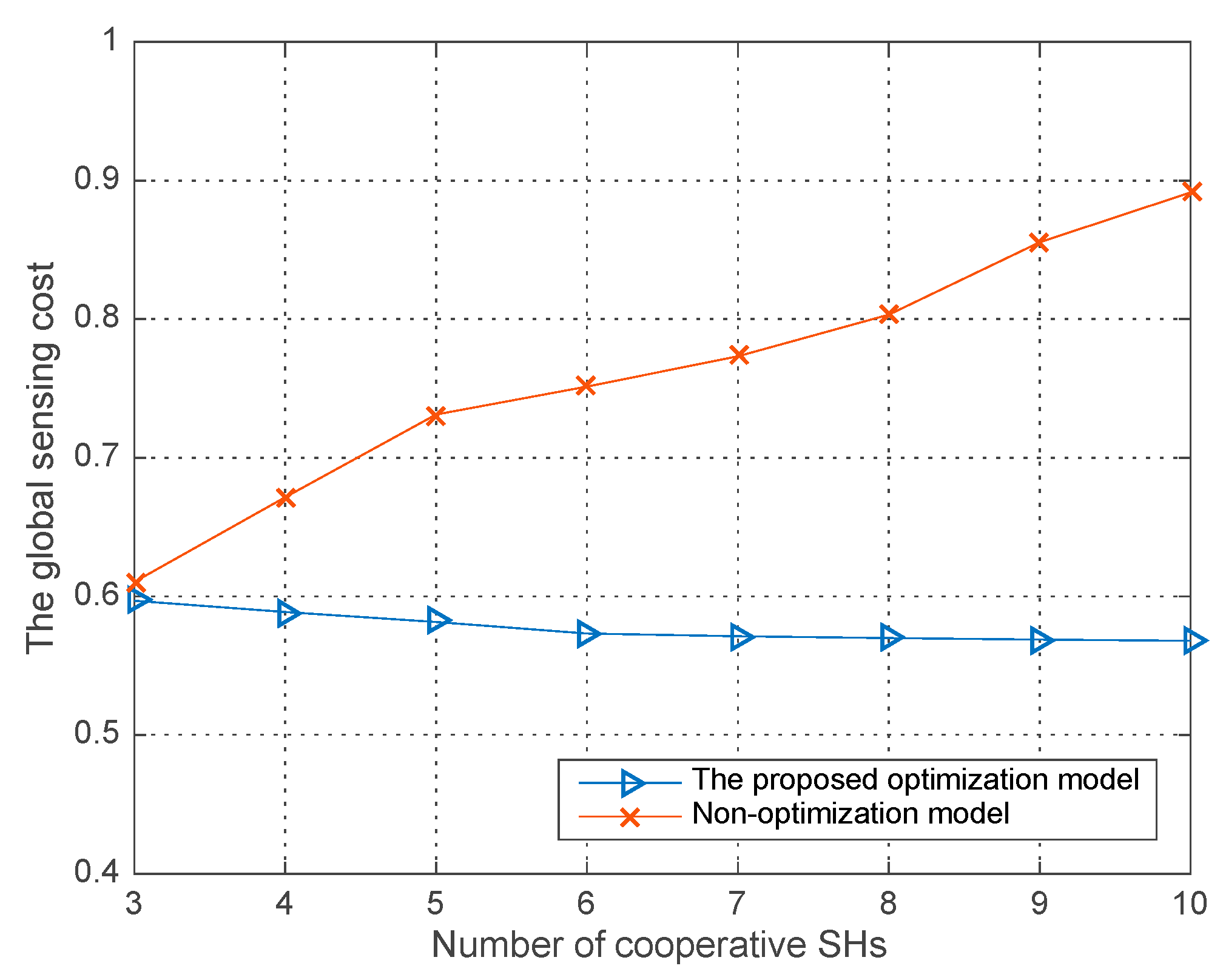
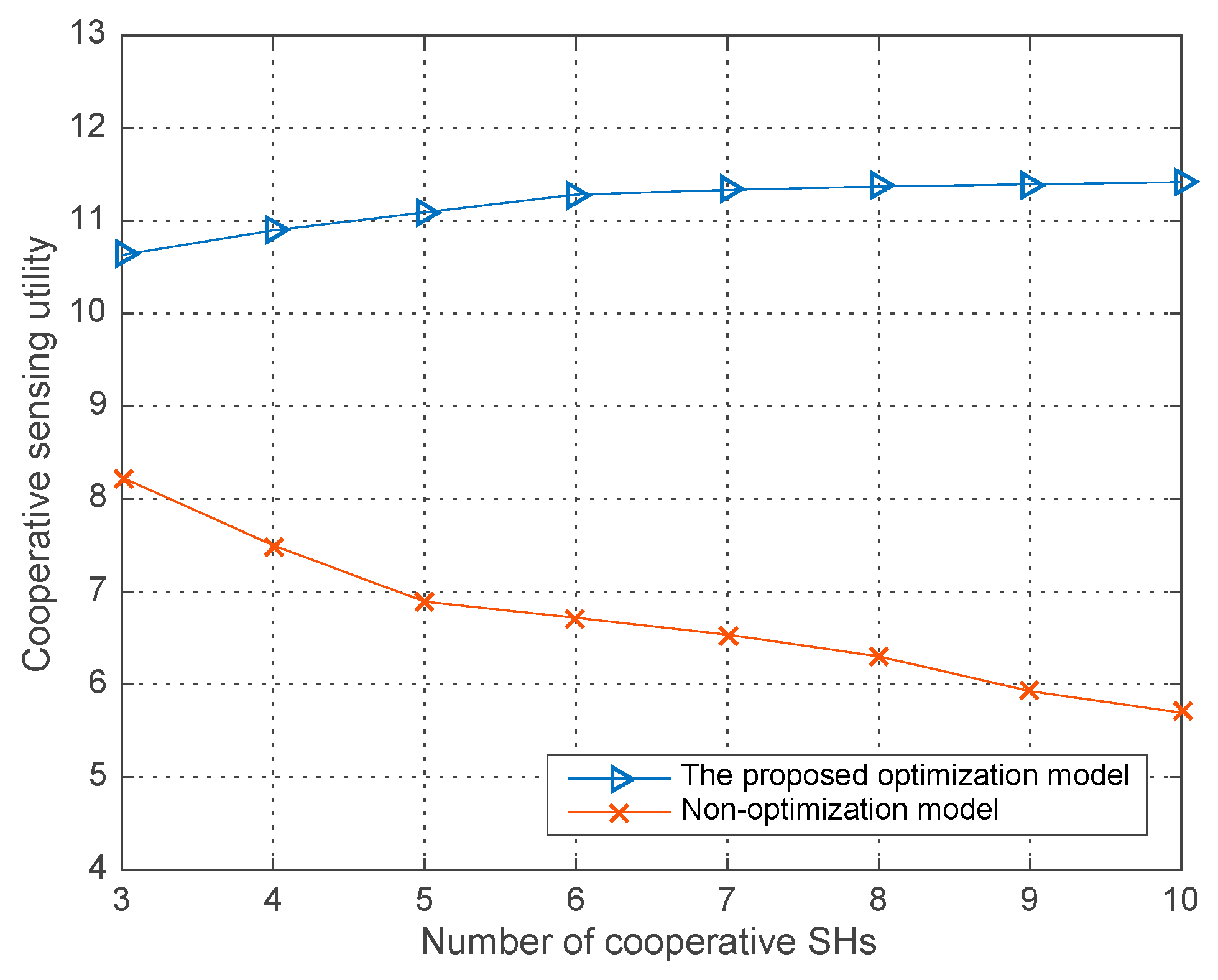
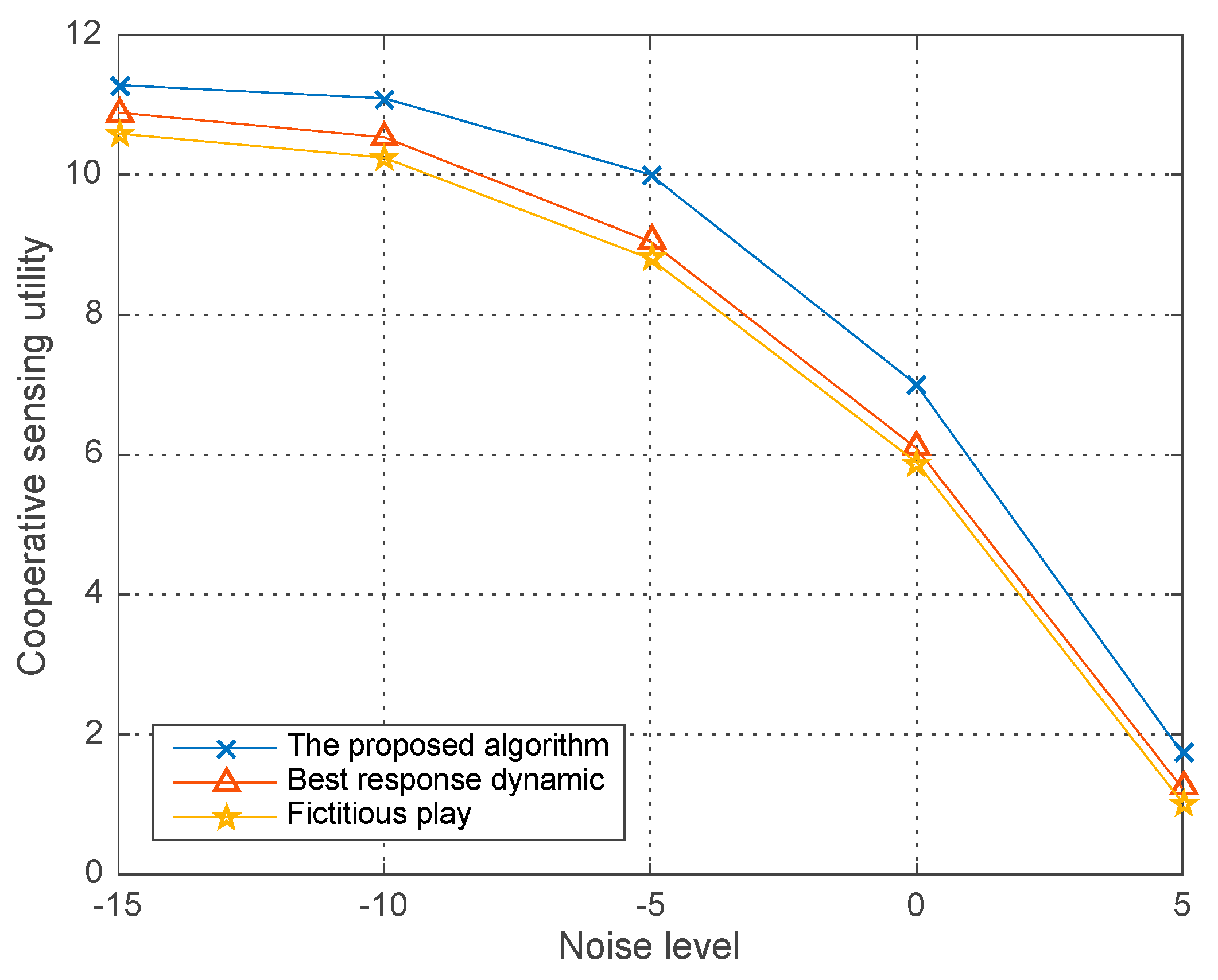
4.2. Model Comparison
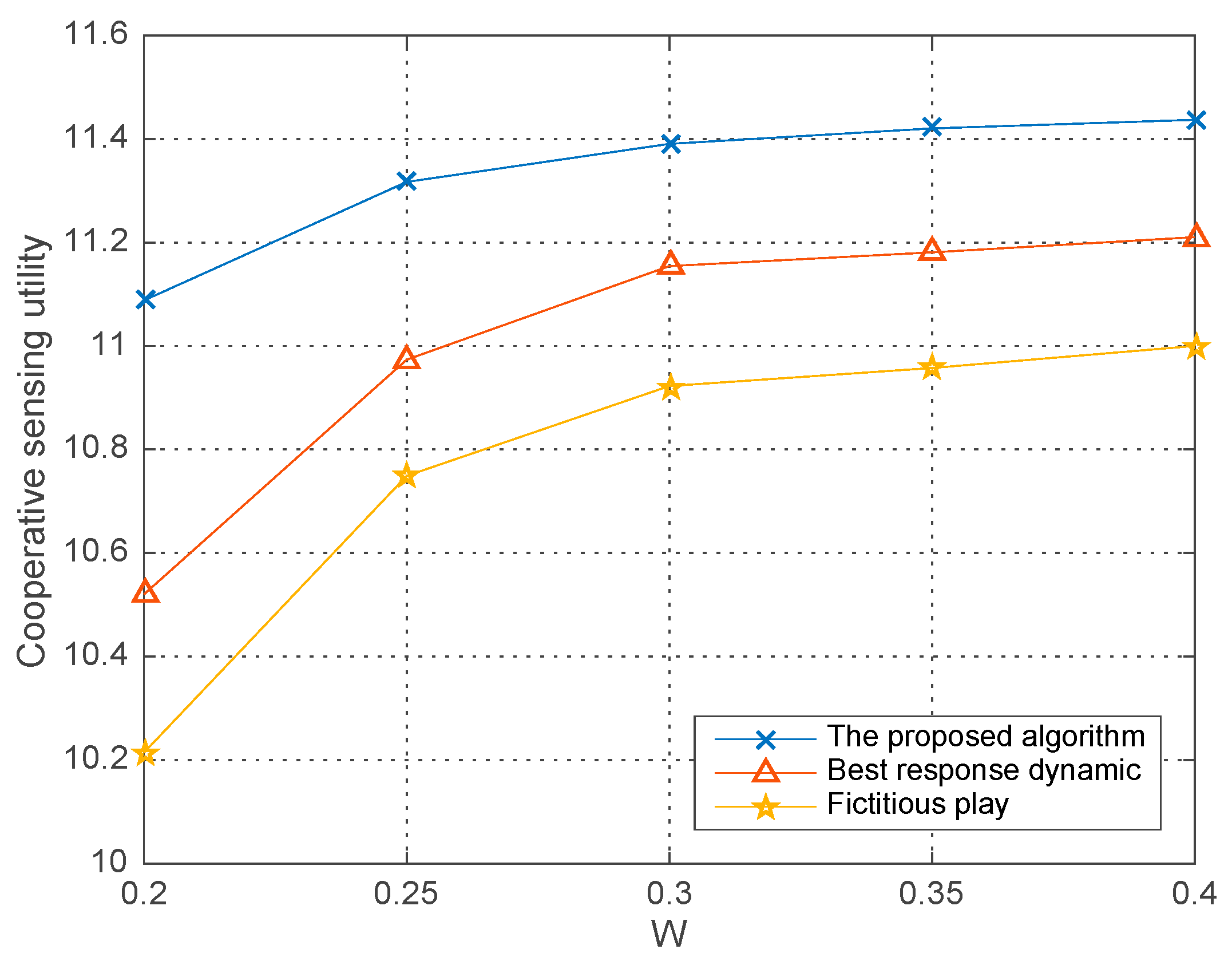
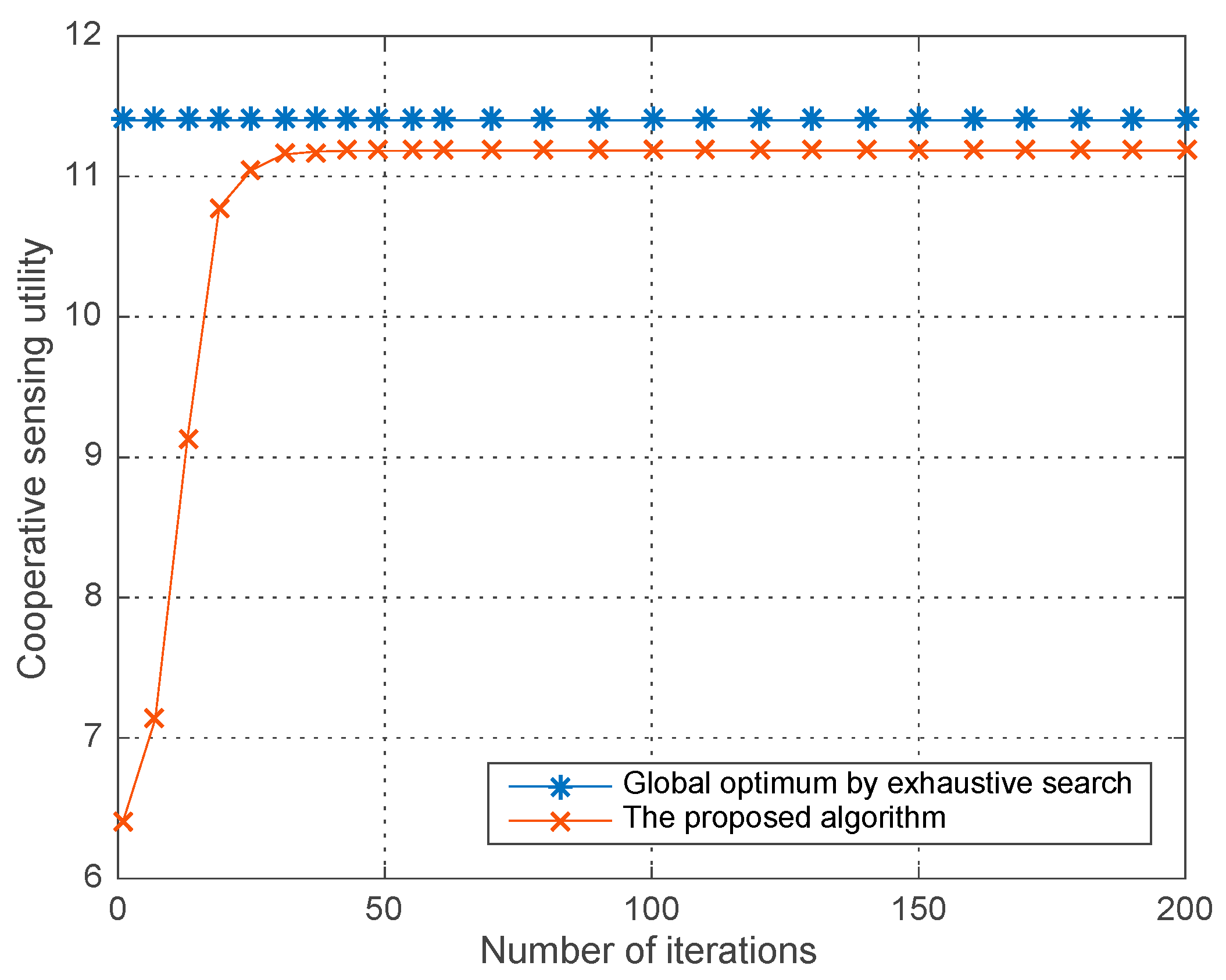
4.3. Algorithm Comparison
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yucek, T.; Arslan, H. A survey of spectrum sensing algorithms for cognitive radio applications. IEEE Commun. Surv. Tutor. 2009, 11, 116–130. [Google Scholar] [CrossRef]
- Haykin, S. Cognitive radio: Brain-empowered wireless communications. IEEE J. Sel. Area Commun. 2005, 23, 201–220. [Google Scholar] [CrossRef]
- Shokri-Ghadikolaei, H.; Abdi, Y.; Nasiri-Kenari, M. Analytical and learning-based spectrum sensing time optimization in cognitive radio systems. IET Commun. 2013, 7, 480–489. [Google Scholar] [CrossRef]
- Haddadi, S.; Saeedi, H.; Navaie, K. Managing Imperfect Spectrum Sensing in the Secondary Service: Increasing Sensing Time or Adopting Channel Coding? IEEE Commun. Lett. 2013, 17, 1232–1235. [Google Scholar] [CrossRef]
- Sun, D.; Song, T.; Gu, B.; Li, X.; Hu, J.; Liu, M. Spectrum Sensing and the Utilization of Spectrum Opportunity Tradeoff in Cognitive Radio Network. IEEE Commun. Lett. 2016, 20, 2442–2445. [Google Scholar] [CrossRef]
- Awin, F.; Abdel-Raheem, E.; Ahmadi, M. Joint Optimal Transmission Power and Sensing Time for Energy Efficient Spectrum Sensing in Cognitive Radio System. IEEE Sens. J. 2017, 17, 369–376. [Google Scholar] [CrossRef]
- Zhang, H.; Nie, Y.; Cheng, J.; Leung, V.C.M.; Nallanathan, V. Sensing Time Optimization and Power Control for Energy Efficient Cognitive Small Cell with Imperfect Hybrid Spectrum Sensing. IEEE Trans. Wirel. Commun. 2017, 16, 730–743. [Google Scholar] [CrossRef]
- Li, Z.; Liu, B.; Si, J.; Zhou, F. Optimal Spectrum Sensing Interval in Energy-Harvesting Cognitive Radio Networks. IEEE Trans. Cogn. Commun. Netw. 2017, 3, 190–200. [Google Scholar] [CrossRef]
- Chen, X.; Chen, H.-H.; Meng, W. Co-operative Communications for Cognitive Radio Networks-From Theory to Applications. IEEE Commun. Surv. Tutor. 2014, 16, 1180–1192. [Google Scholar] [CrossRef]
- Mohammadian, F.; Pourgharehkhan, Z.; Taherpour, A.; Khattab, T. Optimal Collaborative Energy Harvesting Spectrum Sensing with Limited Time Resource. In Proceedings of the IEEE Wireless Conference and Networking Conference, Doha, Qatar, 3–6 April 2016; pp. 1–7. [Google Scholar]
- Zhong, W.; Chen, K.; Liu, X. Joint Optimal Energy-Efficient Co-Operative Spectrum Sensing and Transmission in Cognitive Radio. China Commun. 2017, 14, 98–110. [Google Scholar] [CrossRef]
- Guo, B.; Yu, Z.; Zhou, X.; Zhang, D. From Participatory Sensing to Mobile Crowd Sensing. In Proceedings of the IEEE PERCOM Workshops, Budapest, Hungary, 24–28 March 2014; pp. 593–598. [Google Scholar]
- Xiao, M.; Wu, J.; Huang, L.; Wang, Y.; Liu, C. Multi-task assignment for crowdsensing in mobile social networks. In Proceedings of the IEEE Conference on Computer Communications (INFOCOM), Kowloon, Hong Kong, China, 26 April–1 May 2015; pp. 1–9. [Google Scholar]
- Jaimes, L.G.; Vergara-Laurens, I.J.; Raij, A. A survey of incentive techniques for mobile crowd sensing. IEEE Internet Things J. 2015, 2, 370–380. [Google Scholar] [CrossRef]
- Jaimes, L.G.; Chakeri, A.; Lopez, J.; Raij, A. A co-operative incentive mechanism for recurrent crowd sensing. In Proceedings of the IEEE SoutheastCon Conference, Fort Lauderdale, FL, USA, 9–12 April 2015; pp. 1–5. [Google Scholar]
- Jin, H.; Su, L.; Nahrstedt, K. Theseus: Incentivizing Truth Discovery in Mobile Crowd Sensing Systems. In Proceedings of the ACM International Symposium on Mobile Ad Hoc Networking and Computing, IIT Madras, Chennai, India, 10–14 July 2017; pp. 1–10. [Google Scholar]
- Pouryazdan, M.; Kantarci, B.; Soyata, T.; Foschini, L.; Song, H. Quantifying User Reputation Scores, Data Trustworthiness, and User Incentives in Mobile Crowd-Sensing. IEEE Access 2017, 5, 1382–1397. [Google Scholar] [CrossRef]
- Pouryazdan, M.; Kantarci, B.; Soyata, T.; Song, H. Anchor-Assisted and Vote-Based Trustworthiness Assurance in Smart City Crowdsensing. IEEE Access 2016, 4, 1–13. [Google Scholar] [CrossRef]
- Pouryazdan, M.; Fiandrino, C.; Kantarci, B.; Kliazovich, D.; Soyata, T.; Bouvry, P. Game-theoretic recruitment of sensing service providers for trustworthy cloud-centric Internet-of-Things (IoT) applications. In Proceeding of the IEEE Globecom Workshops (GC Wkshps), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Jin, H.; Su, L.; Xiao, H.; Nahrstedt, K. INCEPTION: Incentivizing Privacy-Preserving Dat Aggregation for Mobile Crowd Sensing Systems. In Proceedings of the 17th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Paderborn, Germany, 4–8 July 2016; pp. 1–10. [Google Scholar]
- Jin, H.; Su, L.; Chen, D.; Nahrstedt, K.; Xu, J. Quality of information aware incentive mechanisms for mobile crowd sensing systems. In Proceedings of the 16th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Guangzhou, China, 22–25 June 2015; pp. 1–10. [Google Scholar]
- Wen, Y.; Shi, J.; Zhang, Q.; Tian, X.; Huang, Z.; Yu, H.; Cheng, Y.; Shen, X. Quality-Driven Auction-Based Incentive Mechanism for Mobile Crowd Sensing. IEEE Trans. Veh. Technol. 2015, 64, 4203–4214. [Google Scholar] [CrossRef]
- Ying, X.; Roy, S.; Poovendran, R. Pricing Mechanisms for Crowd-Sensed Spatial-Statistics-Based Radio Mapping. IEEE Trans. Cogn. Commun. Netw. 2017, 3, 242–254. [Google Scholar] [CrossRef]
- Mendez, D.; Labrador, M.A. Density maps: Determining where to sample in participatory sensing systems. In Proceedings of the Third FTRA International Conference on Mobile, Ubiquitous and Intelligent Computing, Vancouver, BC, Canada, 26–28 June 2012; pp. 35–40. [Google Scholar]
- Chen, P.-Y.; Cheng, S.-M.; Ting, P.-S.; Lien, C.-W.; Chu, F.-J. When Crowdsourcing Meets Mobile Sensing: A Social Network Perspective. IEEE Commun. Mag. 2015, 53, 157–163. [Google Scholar] [CrossRef]
- An, J.; Gui, X.; Wang, Z.; Yang, J.; He, X. A Crowdsourcing Assignment Model Based on Mobile Crowd Sensing in the Internet of Things. IEEE Internet Things J. 2015, 2, 358–369. [Google Scholar] [CrossRef]
- Han, K.; Graham, E.A.; Vassallo, D.; Estrin, D. Enhancing motivation in mobile participatory sensing project through gaming. In Proceedings of the IEEE Third International Conference on Privacy, Security, Risk and Trust and the IEEE Third International Conference on Social Computing, Boston, MA, USA, 9–11 October 2011; pp. 1443–1448. [Google Scholar]
- Davis, M.; Maschler, M. The kernel of a co-operative game. Nav. Res. Logist. 2010, 12, 223–259. [Google Scholar] [CrossRef]
- Liang, Y.-C.; Zeng, Y.; Peh, E.C.Y.; Hoang, A.T. Sensing-throughout tradeoff for cognitive radio networks. IEEE Trans. Wirel. Commun. 2008, 7, 1326–1337. [Google Scholar] [CrossRef]
- Cormen, T.H.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms, 3rd ed.; MIT Press: Cambridge, MA, USA, 2001; pp. 1052–1098. [Google Scholar]
- Schubert, K.; Master, N.; Zhou, Z.; Bambos, N. Asynchronous best-response dynamics for resource allocation games in cloud computing. In Proceedings of the American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 4613–4618. [Google Scholar]
- Rose, L.; Lasaulce, S.; Perlaza, S.M. Learning equilibria with partial information in decentralized wireless networks. IEEE Commun. Mag. 2011, 4, 136–142. [Google Scholar] [CrossRef] [Green Version]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Zhang, S.; Zhao, X. Power Allocation for Sensing-Based Spectrum Sharing Cognitive Radio System with Primary Quantized Side Information. China Commun. 2016, 13, 33–43. [Google Scholar] [CrossRef]
- Das, S.; Mukhopadhyay, S. Sensing Error Minimization for Cognitive Radio in Dynamic Environment using Death Penalty Differential Evolution based Threshold Adaptation. In Proceedings of the India Conference, Bangalore, India, 16–18 December 2016; pp. 1–6. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description | Notation | Description |
|---|---|---|---|
| Sensing coalition | Co-operative detection probability | ||
| The number of SHs | Sensing time strategy of SH | ||
| Local detection probability of SH | Maximal sensing time | ||
| Target detection probability | Sensing time strategy profile | ||
| Local false alarm probability of SH | Vector space of | ||
| Error probability form SH to head node | Sensing cost of SH | ||
| Co-operative detection probability | Threshold of false alarm probability |
| Notation | Value | Description |
|---|---|---|
| 0.9 | Detection threshold | |
| 1.5 | Parameter of obtained profit | |
| 10 | Parameter of obtained profit | |
| 10 | Parameter of obtained profit | |
| 0.5 | Parameter of Global sensing cost | |
| 0.5 | Parameter of Global sensing cost | |
| 100 | Population size | |
| 0.9 | Crossover probability |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Zhu, Q. Social Incentive Mechanism Based Multi-User Sensing Time Optimization in Co-Operative Spectrum Sensing with Mobile Crowd Sensing. Sensors 2018, 18, 250. https://doi.org/10.3390/s18010250
Li X, Zhu Q. Social Incentive Mechanism Based Multi-User Sensing Time Optimization in Co-Operative Spectrum Sensing with Mobile Crowd Sensing. Sensors. 2018; 18(1):250. https://doi.org/10.3390/s18010250
Chicago/Turabian StyleLi, Xiaohui, and Qi Zhu. 2018. "Social Incentive Mechanism Based Multi-User Sensing Time Optimization in Co-Operative Spectrum Sensing with Mobile Crowd Sensing" Sensors 18, no. 1: 250. https://doi.org/10.3390/s18010250
APA StyleLi, X., & Zhu, Q. (2018). Social Incentive Mechanism Based Multi-User Sensing Time Optimization in Co-Operative Spectrum Sensing with Mobile Crowd Sensing. Sensors, 18(1), 250. https://doi.org/10.3390/s18010250