Joint Bearing and Range Estimation of Multiple Objects from Time-Frequency Analysis


Abstract
:1. Introduction
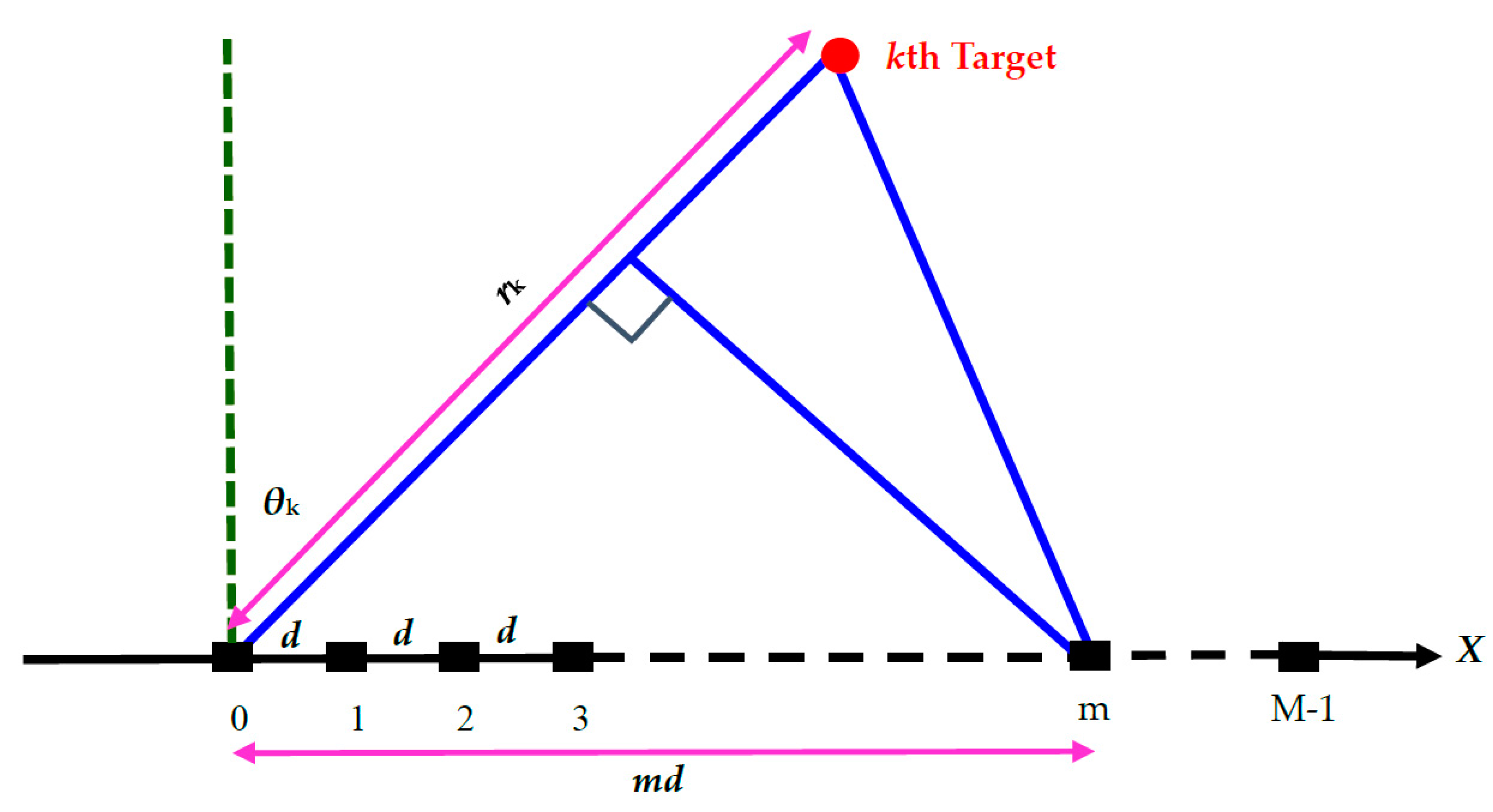
2. Data Model
3. Proposed Method
3.1. Overview of HHT
- Identify the extrema of the dataset , and form the envelopes defined by the local maxima and minima by the cubic spline interpolation method.
- Form the mean values by averaging the upper envelope and lower envelope, and subtract the mean values from the data to obtain the first component, .
- Check whether the conditions for an IMF are satisfied. If the first component is not an IMF, let be the new data set. Continue with steps 1 and 2 until the first component is an IMF.
- Let the first IMF component be . Let . Continue with steps 1–3 until is smaller than a predetermined value or becomes a monotonic function from which no more IMF can be extracted. The first component contains the finest scale or the shortest period component of the signal. The higher components contain progressively longer period components. For data with a trend, is the trend. At the end of this process, the signal can be expressed aswhere is the number of IMFs.
3.2. HHT-Based Target Location Estimation Scheme
- Step 1.
- Obtain the IMFs of the snapshot data in Equation (1) by EMD (see Equation (8)).
- Step 2.
- Perform HSA on the IMFs to obtain spatial IFs (see Equations (9)–(11)).
- Step 3.
- Analyze each spatial IF spectrum via linear regression to obtain intercept and slope for the target’s joint bearing and range estimation (see Equations (15)–(18)).
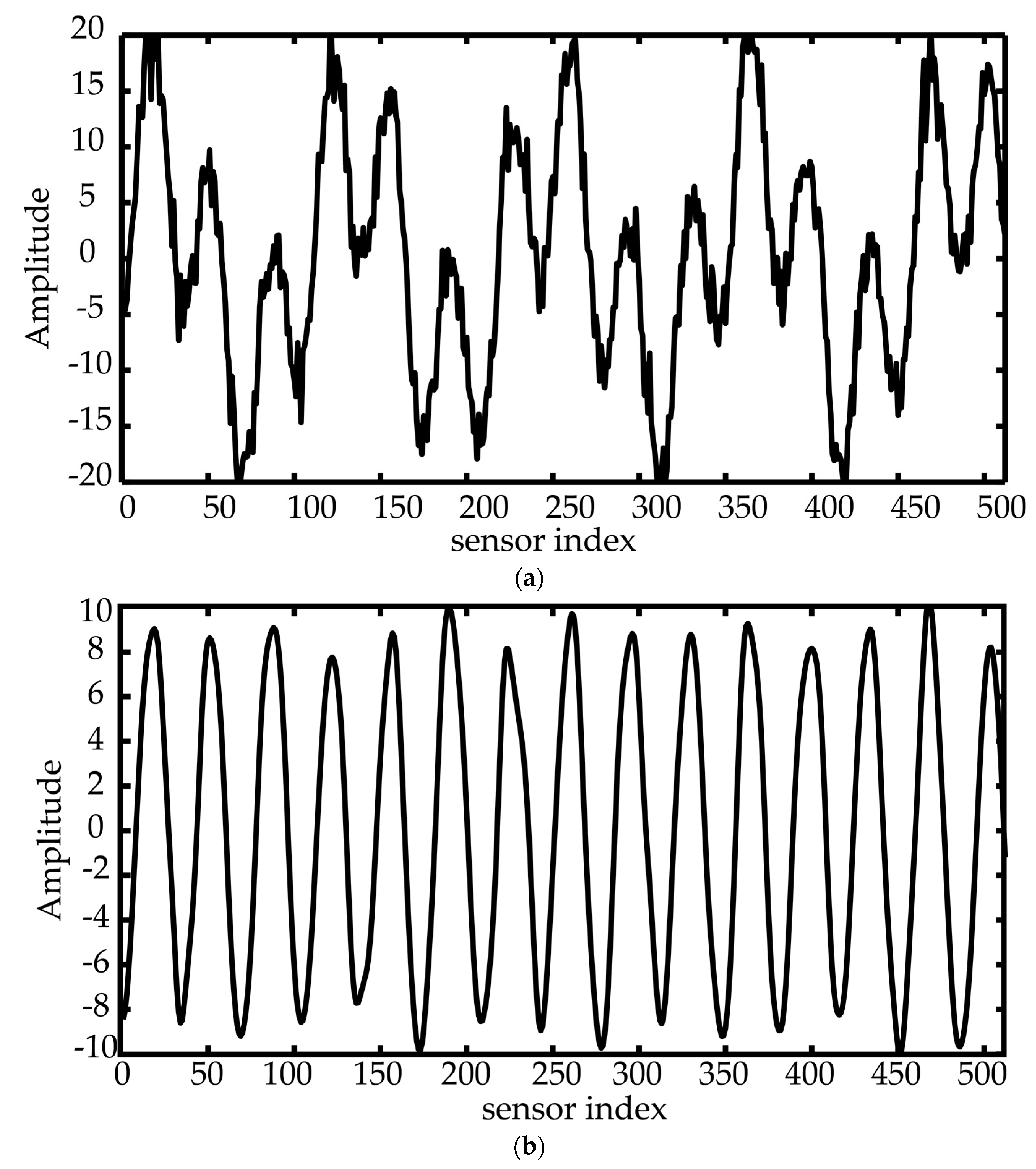
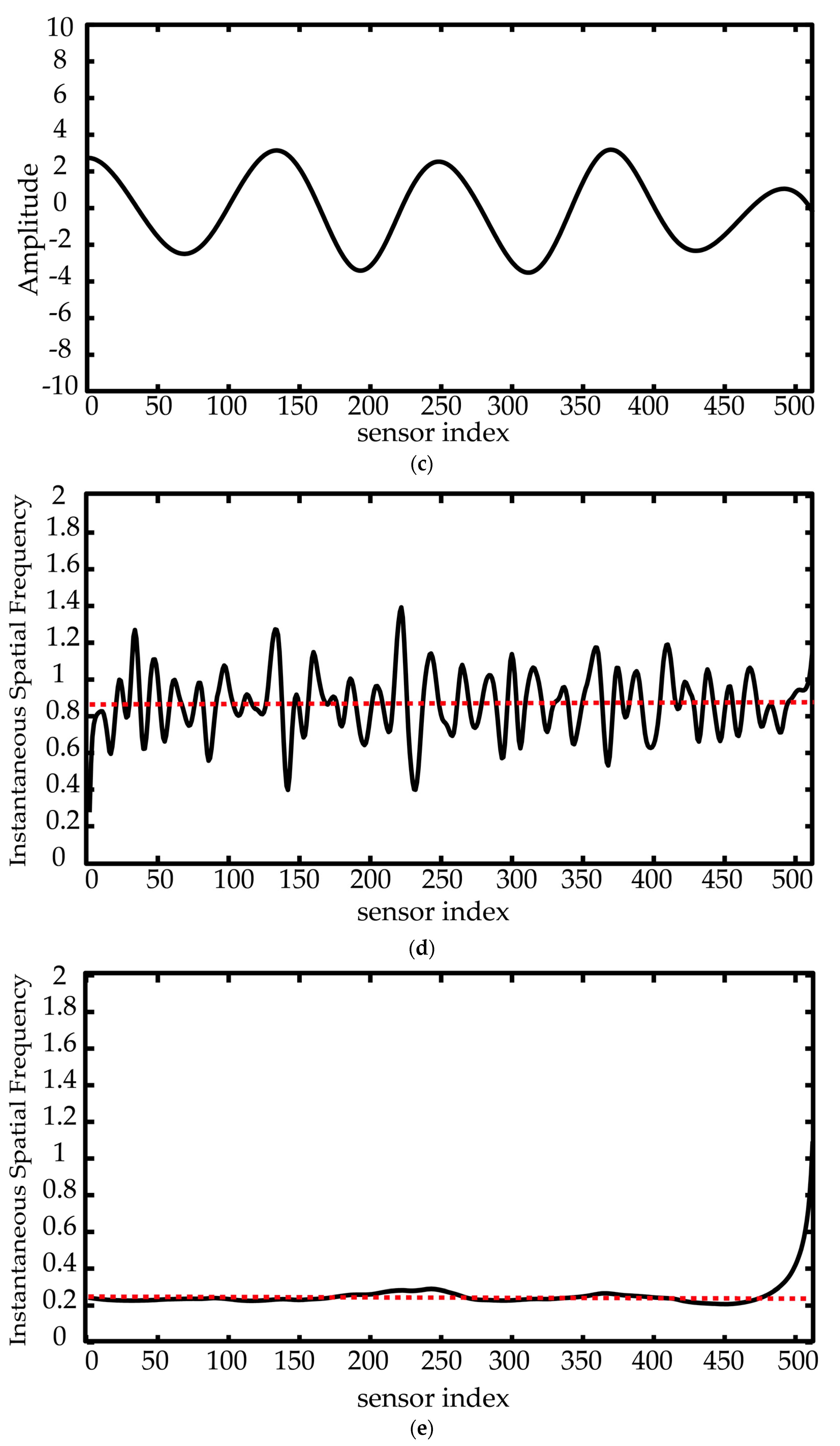
4. Simulation Results
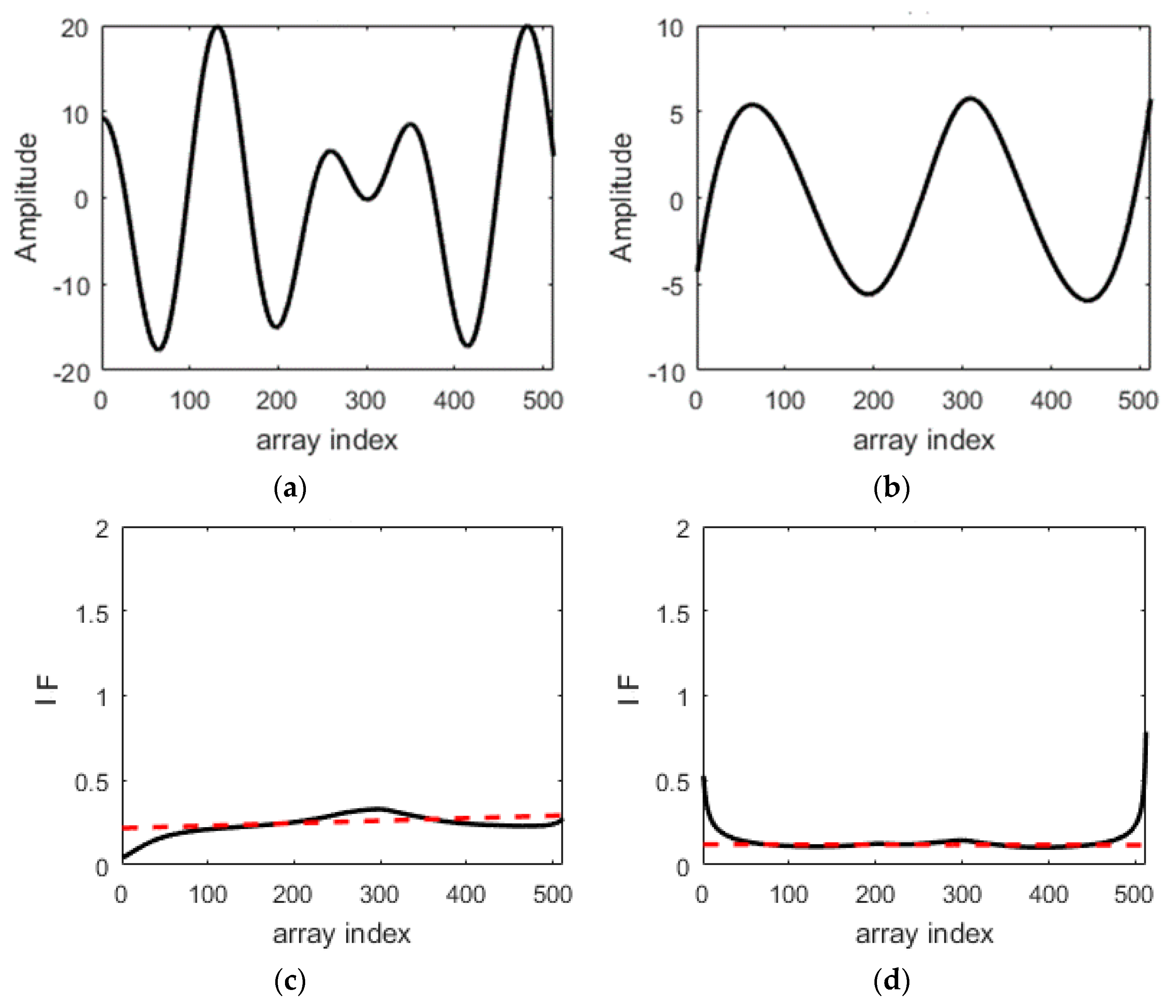
5. Experimental Approach
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Derivation of Equation (12)
References
- Nielsen, R.O. Sonar Signal Processing; Artech House: Norwood, MA, USA, 1991; pp. 231–247. [Google Scholar]
- Tuncer, T.E.; Friedlander, B. Classical and Modern Direction-Of-Arrival Estimation; Academic Press: Cambridge, MA, USA, 2009; pp. 9–24. [Google Scholar]
- Gao, F.; Gershman, A.B. A generalized ESPRIT approach to direction-of-arrival estimation. IEEE Signal Process. Lett. 2005, 12, 254–257. [Google Scholar]
- Welch, P.D. The use of fast fourier transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef]
- Crespi, A.; Osellame, R.; Ramponi, R.; Bentivegna, M.; Flamini, F.; Spagnolo, N.; Viggianiello, N.; Innocenti, L.; Mataloni, P.; Sciarrino, F. Suppression law of quantum states in a 3D photonic fast Fourier transform chip. Nat. Commun. 2016, 7, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Schaefer, R.T.; Schafer, R.W.; Mersereau, R.M. Digital Signal Processing for Doppler Radar Signals. In Proceedings of the ICASSP ’79. IEEE International Conference on Acoustics, Speech, and Signal Processing, Washington, DC, USA, 2–4 April 1979; pp. 170–173. [Google Scholar]
- Stéphane, M. A Wavelet Tour of Signal Processing, 2nd ed.; Academic Press: San Diego, CA, USA, 1999; pp. 11–14. [Google Scholar]
- Cohen, L. Time-Frequency Analysis: Theory and Application; Prentice Hall: New York, NY, USA, 1995; pp. 70–135. [Google Scholar]
- Martin, W.; Flandrin, P. Wigner-Ville spectral analysis of nonstationary processes. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 1461–1470. [Google Scholar] [CrossRef]
- Huang, N.E.; Samuel, S.P.S. Hilbert-Huang Transform and Its Applications; World Scientific Pub Co. Inc.: Singapore, 2005; Volume 5. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R. A new view of nonlinear water waves: The Hilbert spectrum. Annu. Rev. Fluid Mech. 1999, 31, 417–457. [Google Scholar] [CrossRef]
- Schmidt, R.O. Multiple emitter location and signal parameter-estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Hung, H.S.; Chang, S.H.; Wu, C.H. Near-field source localization using MUSIC with polynomial rooting. J. Mar. Sci. Tech. 1998, 6, 1–7. [Google Scholar]
- Huang, Y.D.; Barkat, M. Near-field multiple source localization by passive sensor array. IEEE Trans. Antennas Propag. 1991, 39, 968–975. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Ramesh, R.; Kara, H.; Bowen, C.R. Characteristics of piezoceramic and 3–3 piezocomposite hydrophones evaluated by finite element modelling. Comput. Mater. Sci. 2004, 30, 397–403. [Google Scholar] [CrossRef]
- Liu, J.C.; Cheng, Y.T.; Ho, S.Y.; Hung, H.S.; Chang, S.H. Fabrication and characterization of high-sensitivity underwater acoustic multimedia communication devices with thick composite PZT films. J. Sens. 2017, 2017, 7326919. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode composition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. A 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Huang, N.E.; Attoh-Okine, N.O. The Hilbert-Huang Transform in Engineering; CRC Press: Boca Raton, FL, USA, 2005; pp. 59–82. [Google Scholar]
- Thuraisingham, R.A. Estimation of Teager energy using the Hilbert-Huang transform. IET Signal Process. 2015, 9, 82–87. [Google Scholar] [CrossRef]
- Tang, S.; Li, Z.; Chen, L. Fault detection in analog and mixed-signal circuits by using Hilbert-Huang transform and coherence analysis. Microelectr. J. 2015, 46, 893–899. [Google Scholar] [CrossRef]
- Robert, J.B. Underwater Electroacoustic Measurements; Defense Technical Information Center: Alexandria, VA, USA, 1970; pp. 109–190.
- Parinov, I.A. Piezoelectrics and Related Materials: Investigations and Applications; Nova Science Publishers: Hauppauge, NY, USA, 2012; pp. 79–113. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Unit | Value |
|---|---|---|
| sound carrier frequency, | kHz | 56 |
| sound speed, | m/s | 1482 |
| sound wavelength, λ | cm | 2.65 |
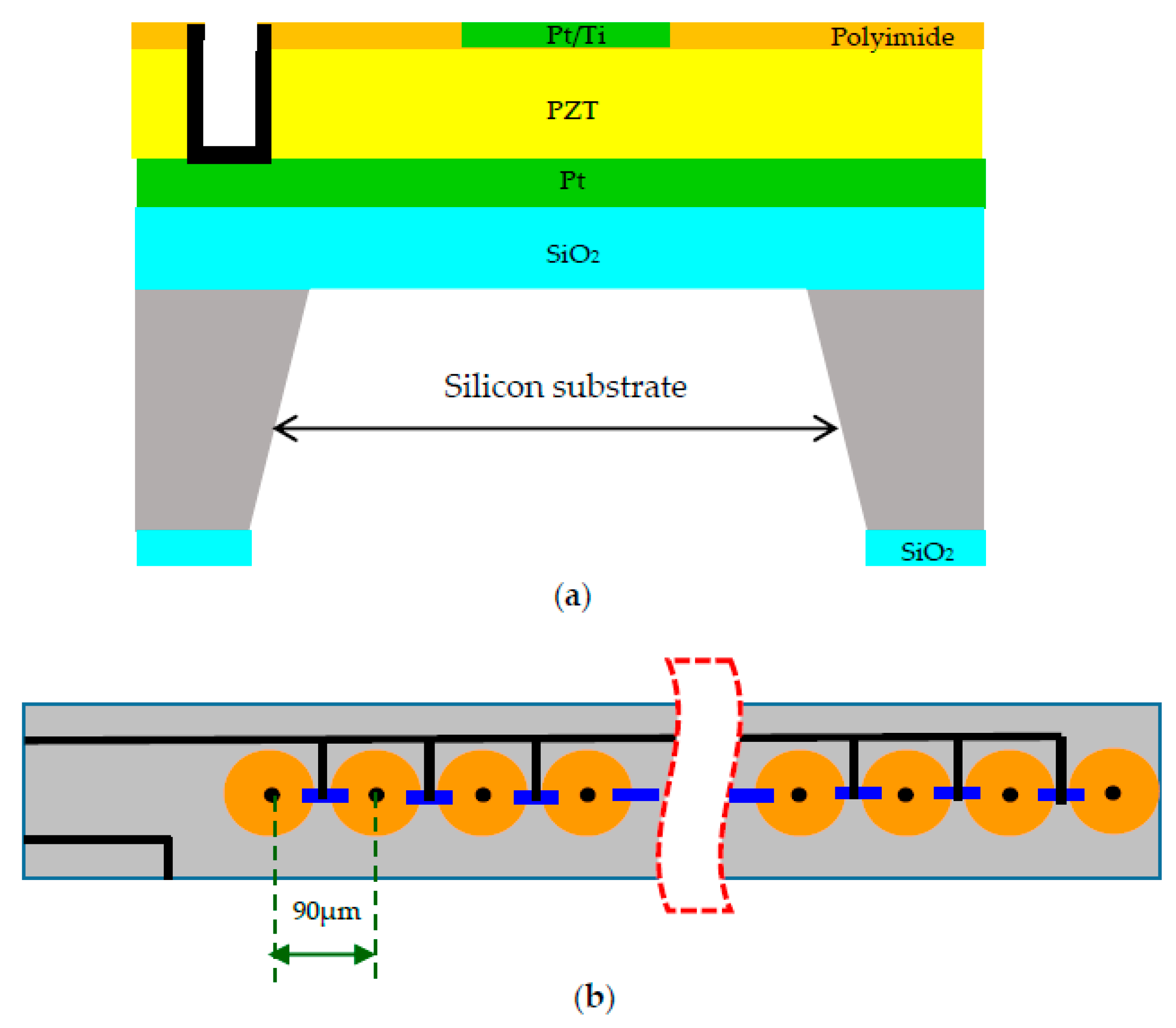
| array pitch, d | cm | 0.009 |
| array element number, M | count | 512 |
| array aperture , Md | cm | 4.6 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.-C.; Cheng, Y.-T.; Hung, H.-S. Joint Bearing and Range Estimation of Multiple Objects from Time-Frequency Analysis. Sensors 2018, 18, 291. https://doi.org/10.3390/s18010291
Liu J-C, Cheng Y-T, Hung H-S. Joint Bearing and Range Estimation of Multiple Objects from Time-Frequency Analysis. Sensors. 2018; 18(1):291. https://doi.org/10.3390/s18010291
Chicago/Turabian StyleLiu, Jeng-Cheng, Yuang-Tung Cheng, and Hsien-Sen Hung. 2018. "Joint Bearing and Range Estimation of Multiple Objects from Time-Frequency Analysis" Sensors 18, no. 1: 291. https://doi.org/10.3390/s18010291
APA StyleLiu, J. -C., Cheng, Y. -T., & Hung, H. -S. (2018). Joint Bearing and Range Estimation of Multiple Objects from Time-Frequency Analysis. Sensors, 18(1), 291. https://doi.org/10.3390/s18010291