L-Tree: A Local-Area-Learning-Based Tree Induction Algorithm for Image Classification


Abstract
:1. Introduction
2. Background
3. Proposed Methodology
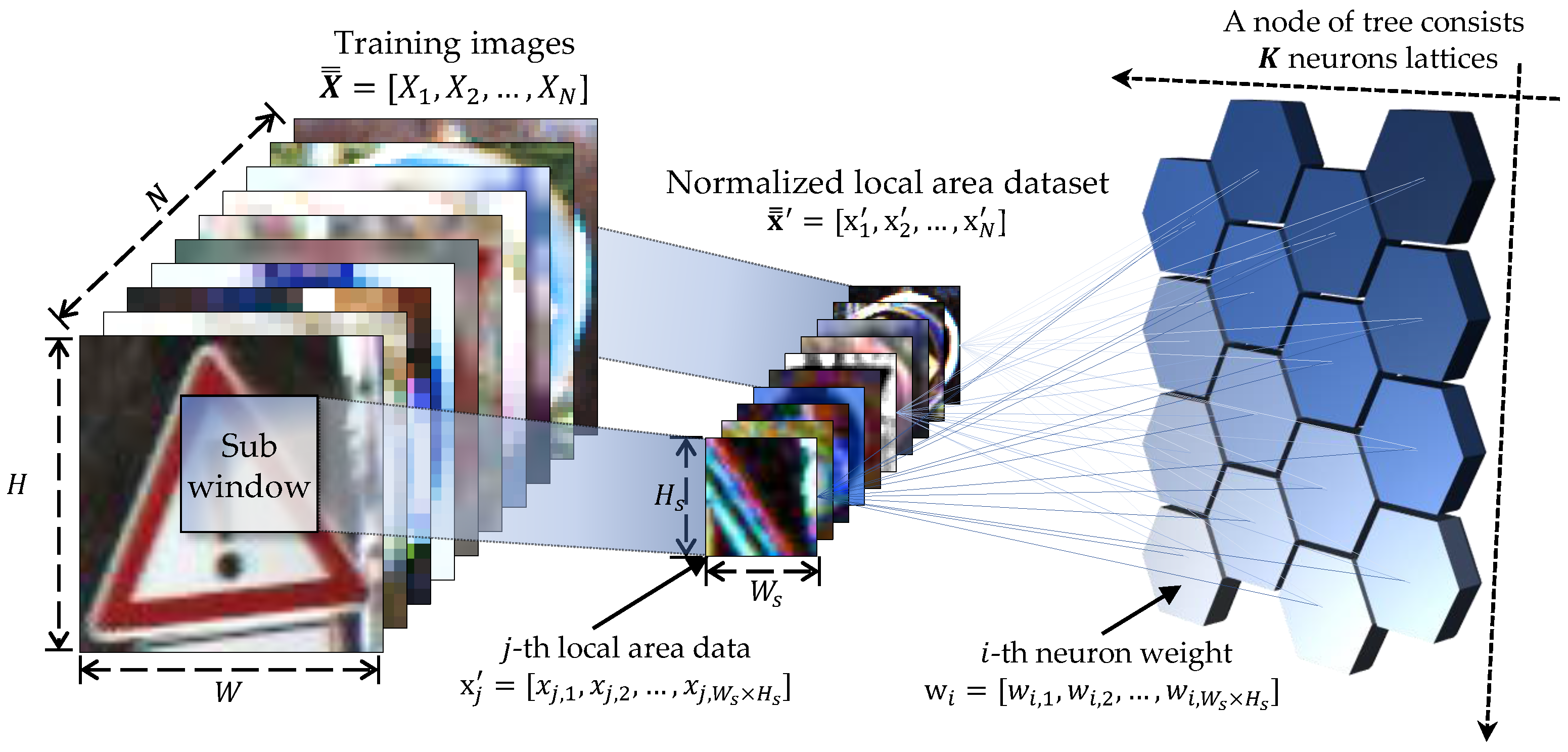
3.1. Random Sub-Window Extraction
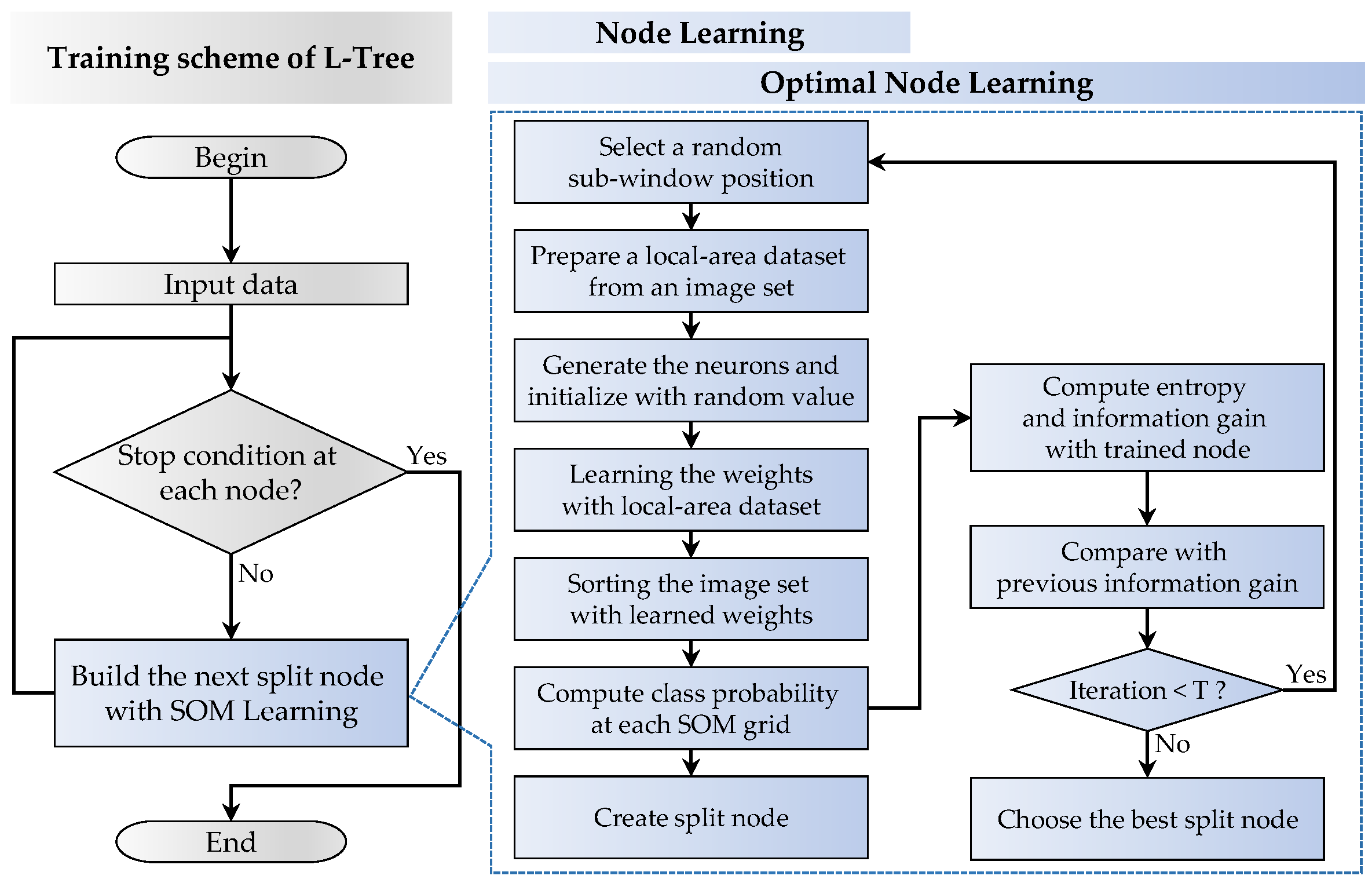
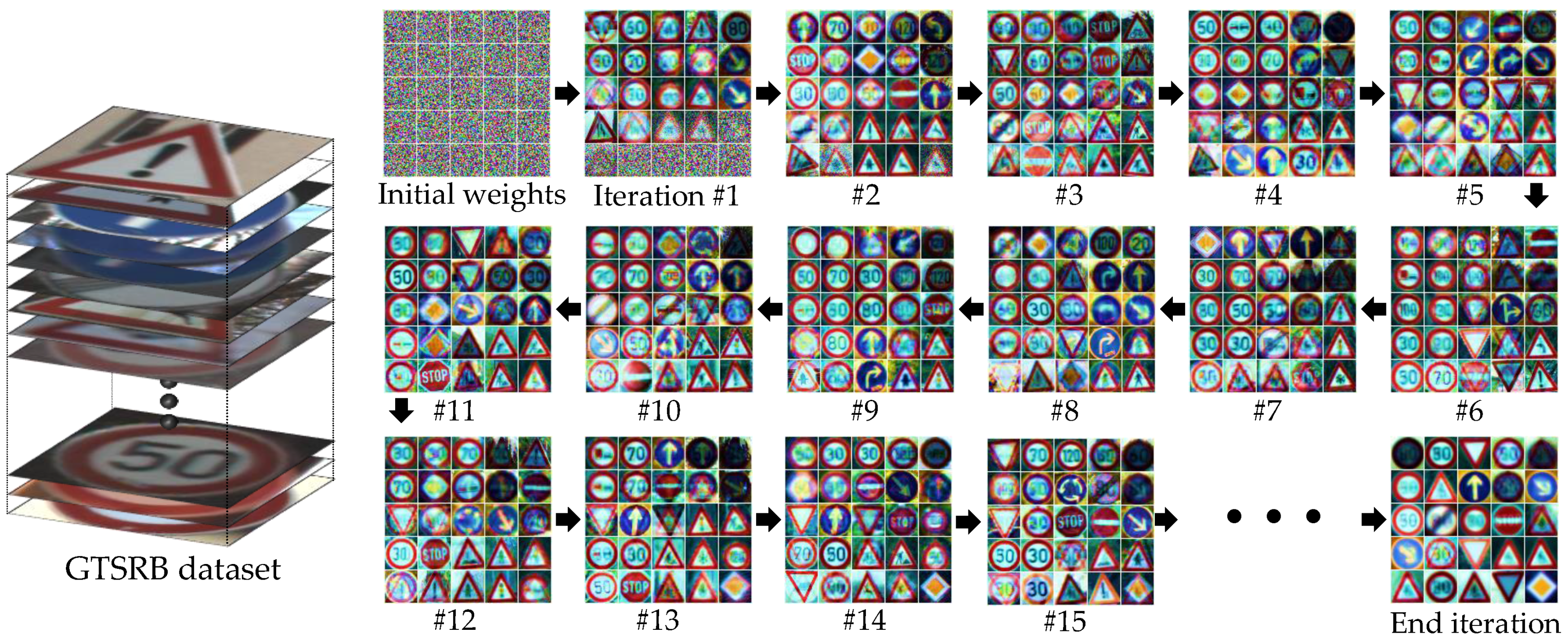
3.2. Node Learning
- the number of training data to train a single node is lower than a certain threshold,
- the depth of the tree exceeds a certain threshold,
- the entropy of the set of classified training samples is 0 or 1.
| Algorithm 1 Training algorithm for L-Tree. | |
Input
| |
| Output: a single L-Tree | |
Build a L-Tree
| |
Node learning
| |
3.3. Optimization
| Algorithm 2 Training algorithm for an Optimized L-Tree. | |
Prepare
| |
Build an optimized L-Tree ()
| |
3.4. Bagging Approach
4. Experiments
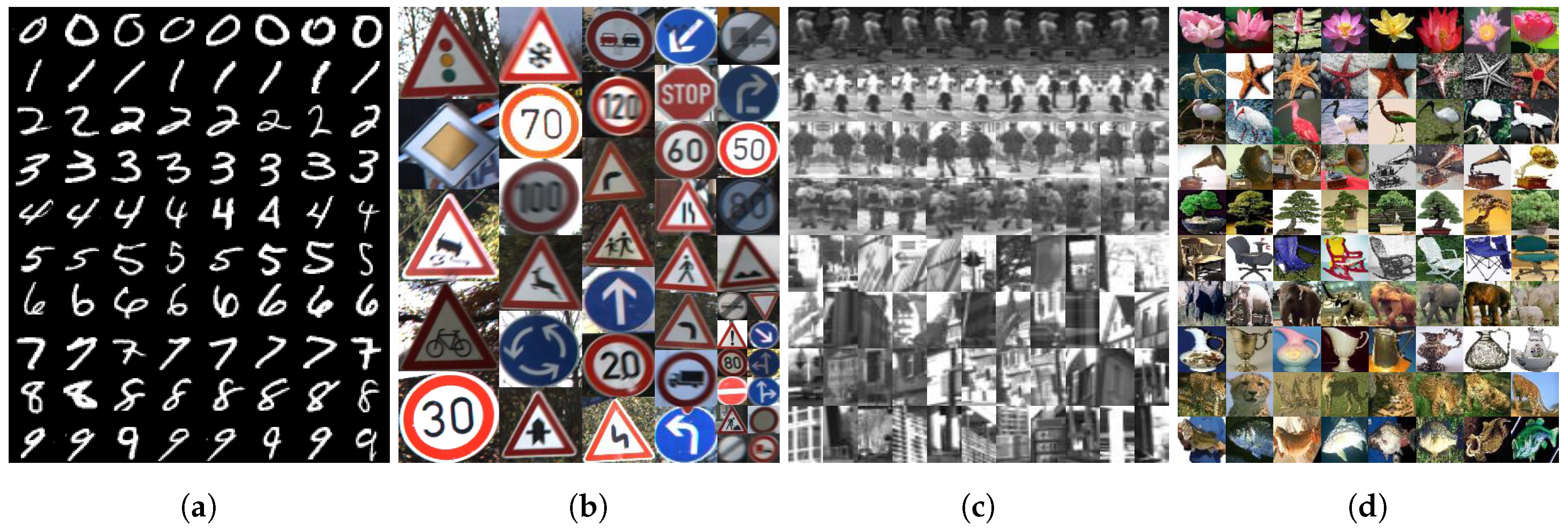
4.1. Dataset
4.2. Evaluation Method
4.3. Experimental Result
4.3.1. Normal Environmental Condition
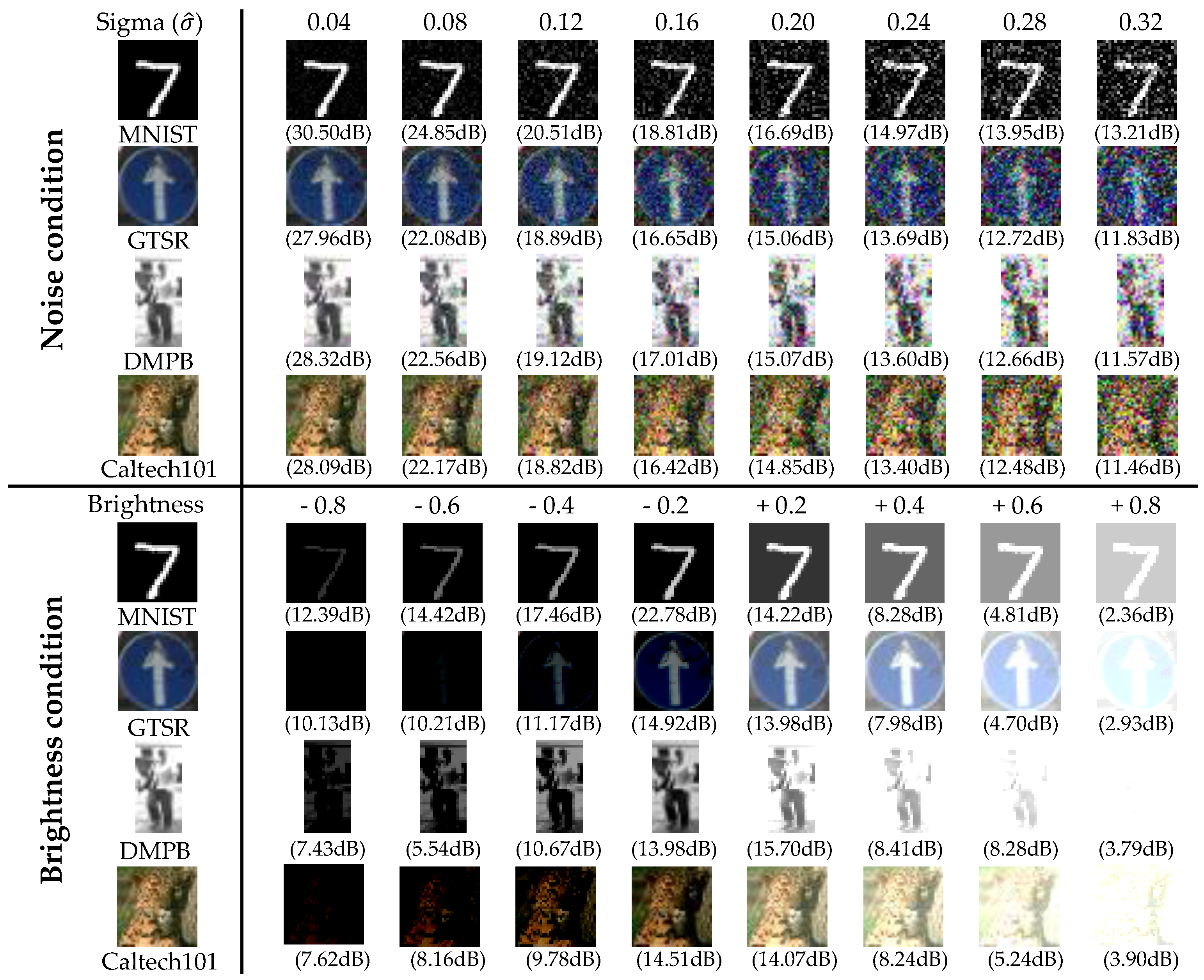
4.3.2. Noisy Condition
4.3.3. Varying Brightness Condition
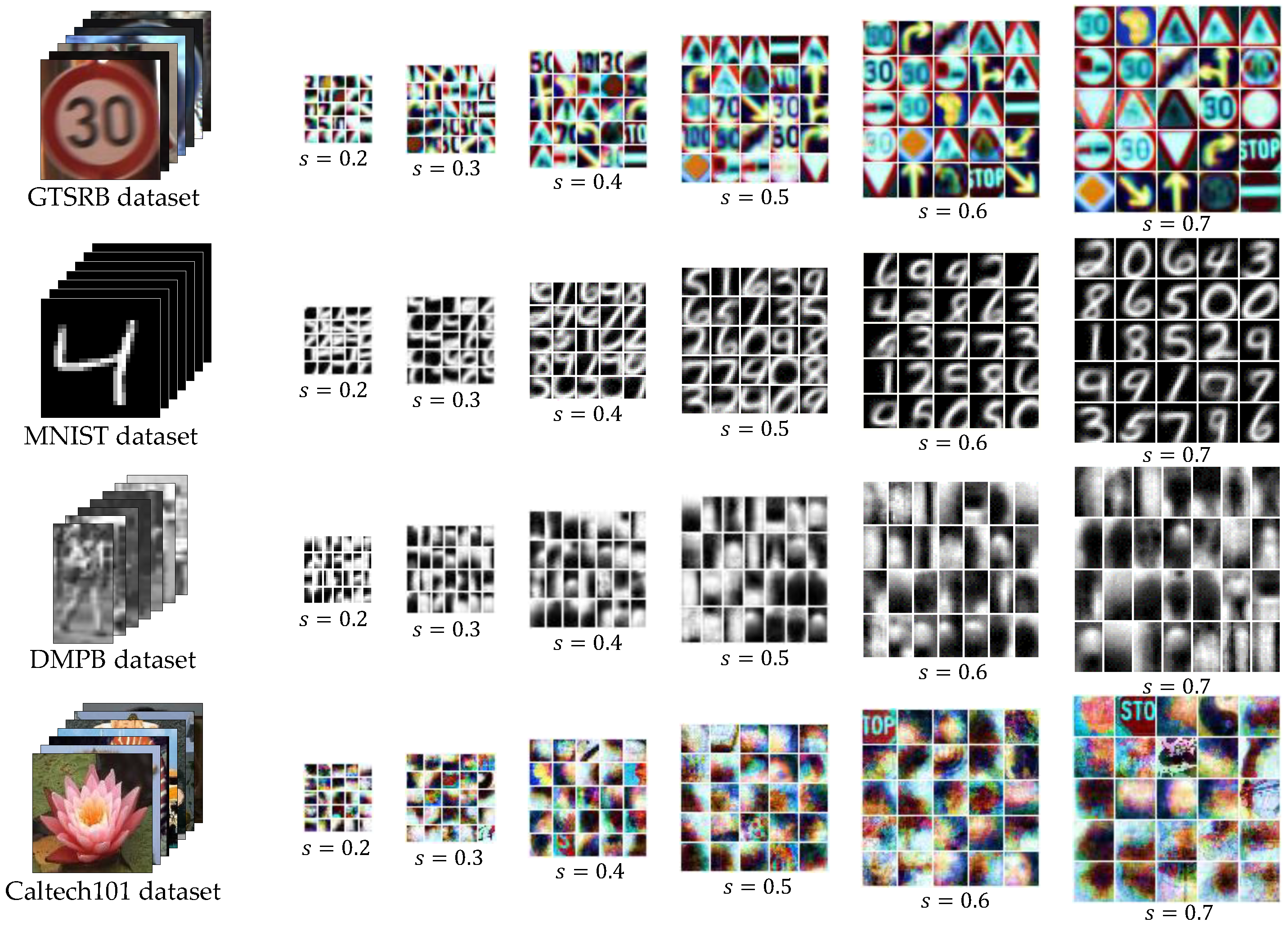
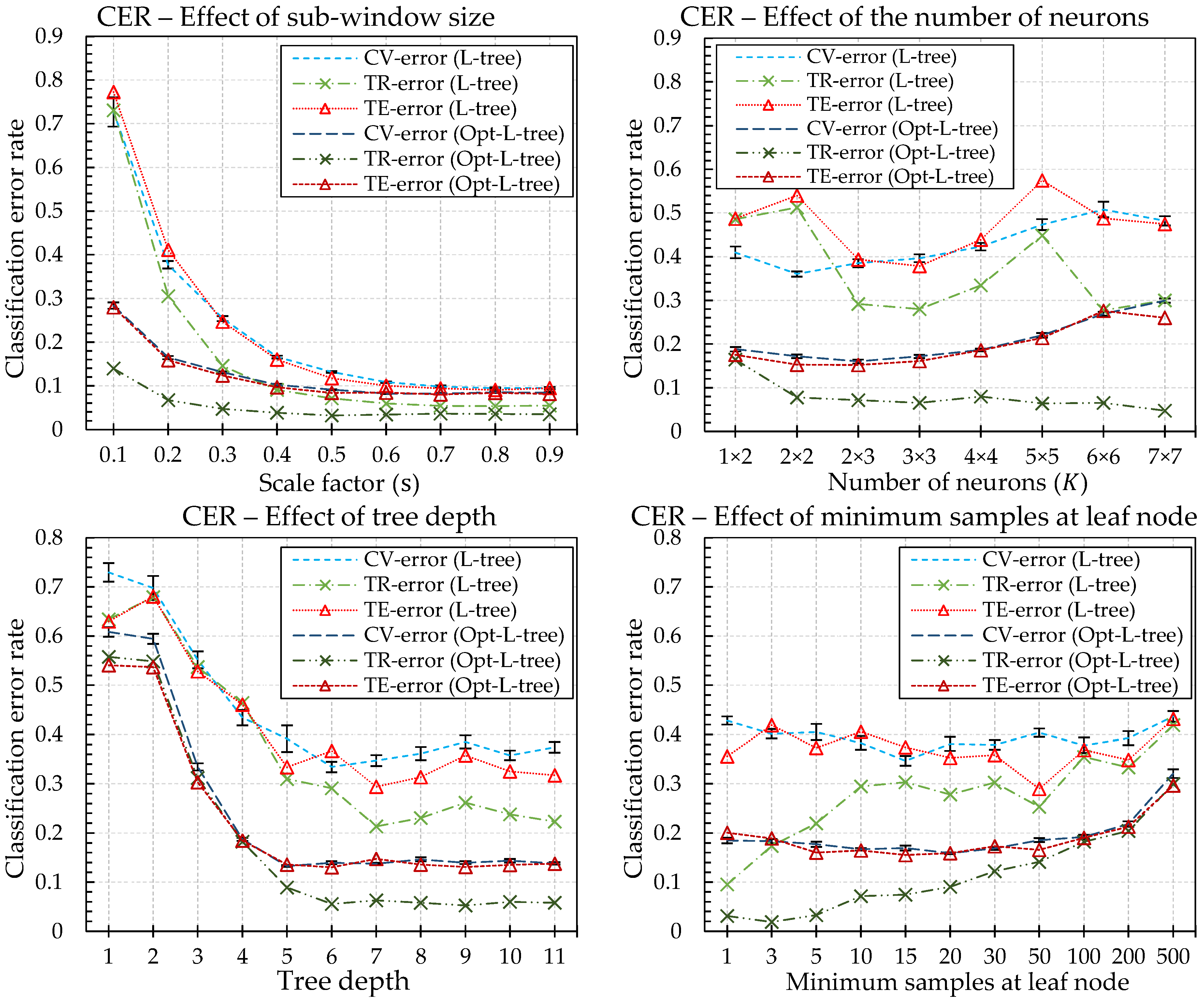
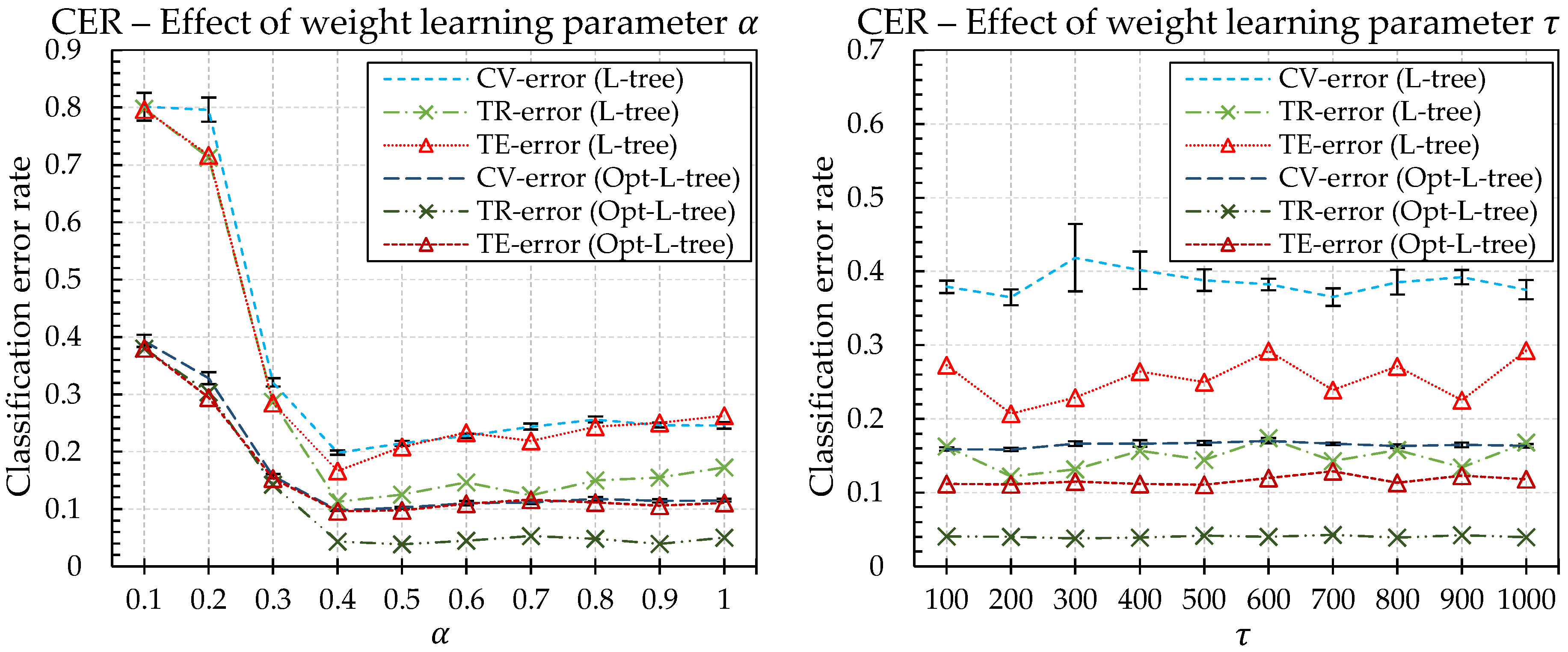
4.3.4. Parameter Influences on the Single L-Tree
4.3.5. Optimization
4.3.6. Computational Complexity
4.3.7. Parameter Influences on the Ensemble Condition
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Effect of Termination Condition and Ensemble Number

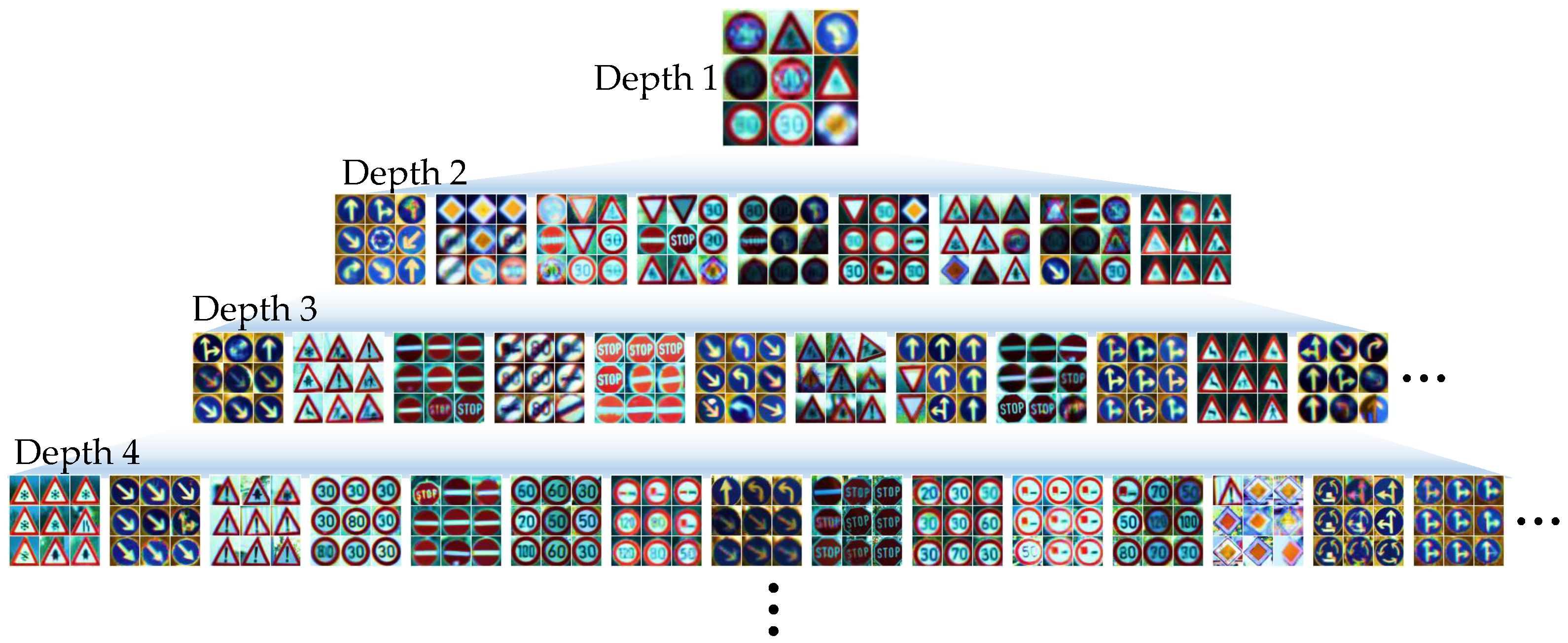
Appendix B. Visualization of Node in One Opt-L-Tree for Other Datasets

References
- Yin, S.; Ouyang, P.; Liu, L.; Guo, Y.; Wei, S. Fast traffic sign recognition with a rotation invariant binary pattern based feature. Sensors 2015, 15, 2161–2180. [Google Scholar] [CrossRef] [PubMed]
- Jia, Q.; Gao, X.; Guo, H.; Luo, Z.; Wang, Y. Multi-layer sparse representation for weighted LBP-patches based facial expression recognition. Sensors 2015, 15, 6719–6739. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Gong, L.; Huang, Y.; Liu, C. Robust tomato recognition for robotic harvesting using feature images fusion. Sensors 2016, 16, 173. [Google Scholar] [CrossRef] [PubMed]
- Yoon, S.; Park, H.; Yi, J. An Efficient Bayesian Approach to Exploit the Context of Object-Action Interaction for Object Recognition. Sensors 2016, 16, 981. [Google Scholar] [CrossRef] [PubMed]
- Rokach, L. Decision forest: Twenty years of research. Inf. Fusion 2016, 27, 111–125. [Google Scholar] [CrossRef]
- Greenhalgh, J.; Mirmehdi, M. Traffic sign recognition using MSER and random forests. In Proceedings of the 20th European Signal Processing Conference (EUSIPCO), Bucharest, Romania, 27–31 August 2012. [Google Scholar]
- Camgöz, N.C.; Kindiroglu, A.A.; Akarun, L. Gesture Recognition Using Template Based Random Forest Classifiers. In Proceedings of the ECCV 2014 Workshops, Zurich, Switzerland, 6–7 September 2014. [Google Scholar]
- Pu, X.; Fan, K.; Chen, X.; Ji, L.; Zhou, Z. Facial expression recognition from image sequences using twofold random forest classifier. Neurocomputing 2015, 168, 1173–1180. [Google Scholar] [CrossRef]
- Tang, D.; Liu, Y.; Kim, T.-K. Fast Pedestrian Detection by Cascaded Random Forest with Dominant Orientation Templates; BMVC: London, UK, 2012. [Google Scholar]
- Luo, H.; Yang, Y.; Tong, B.; Wu, F.; Fan, B. Traffic Sign Recognition Using a Multi-Task Convolutional Neural Network. IEEE Trans. Intell. Transp. Syst. 2017, 1–12. [Google Scholar] [CrossRef]
- Jung, S.; Lee, U.; Jung, J.; Shim, D.H. Real-time Traffic Sign Recognition system with deep convolutional neural network. In Proceedings of the 2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Xi’an, China, 19–22 August 2016. [Google Scholar]
- Joshi, A.; Monnier, C.; Betke, M.; Sclaroff, S. Comparing random forest approaches to segmenting and classifying gestures. Image Vis. Comput. 2017, 58, 86–95. [Google Scholar] [CrossRef]
- Hsu, S.-C.; Huang, H.-H.; Huang, C.-L. Facial Expression Recognition for Human-Robot Interaction. In Proceedings of the IEEE International Conference on Robotic Computing (IRC), Taichung, Taiwan, 10–12 April 2017. [Google Scholar]
- Fanelli, G.; Gall, J.; Van Gool, L. Real time head pose estimation with random regression forests. In Proceedings of the 2011 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Colorado Springs, CO, USA, 20–25 June 2011. [Google Scholar]
- Shotton, J.; Fitzgibbon, A.; Blake, A.; Kipman, A.; Finocchio, M.; Moore, B.; Sharp, T. Real-time human pose recognition in parts from single depth images. Commun. ACM 2013, 56, 116–124. [Google Scholar] [CrossRef]
- Charles, J.; Pfister, T.; Everingham, M.; Zisserman, A. Automatic and efficient human pose estimation for sign language videos. Int. J. Comput. Vis. 2014, 110, 70–90. [Google Scholar] [CrossRef]
- Sun, X.; Wei, Y.; Liang, S.; Tang, X.; Sun, J. Cascaded hand pose regression. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2015. [Google Scholar]
- Dollár, P.; Zitnick, C.L. Fast edge detection using structured forests. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1558–1570. [Google Scholar] [CrossRef] [PubMed]
- Gray, K.R.; Aljabar, P.; Heckemann, R.A.; Hammers, A.; Rueckert, D. Random forest-based similarity measures for multi-modal classification of Alzheimer’s disease. NeuroImage 2013, 65, 167–175. [Google Scholar] [CrossRef] [PubMed]
- Alexander, D.C.; Zikic, D.; Zhang, J.; Zhang, H.; Criminisi, A. Image quality transfer via random forest regression: Applications in diffusion MRI. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Boston, MA, USA, 14–18 September 2014; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Donos, C.; Dümpelmann, M.; Schulze-Bonhage, A. Early seizure detection algorithm based on intracranial EEG and random forest classification. Int. J. Neural Syst. 2015, 25, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Huynh, T.; Gao, Y.; Kang, J.; Wang, L.; Zhang, P.; Lian, J.; Shen, D. Estimating CT image from MRI data using structured random forest and auto-context model. IEEE Trans. Med. Imaging 2016, 35, 174–183. [Google Scholar] [CrossRef] [PubMed]
- Dietterich, T.G. Ensemble methods in machine learning. In Proceedings of the International Workshop on Multiple Classifier Systems, Cagliari, Italy, 21–23 June 2000; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Brodley, C.E.; Utgoff, P.E. Multivariate decision trees. Mach. Learn. 1995, 19, 45–77. [Google Scholar] [CrossRef]
- De’Ath, G. Multivariate regression trees: A new technique for modeling species-environment relationships. Ecology 2002, 83, 1105–1117. [Google Scholar]
- Quinlan, J.R. Induction of decision trees. Mach. Learn. 1986, 1, 81–106. [Google Scholar] [CrossRef]
- Quinlan, J.R. C4.5: Programs for Machine Learning; Morgan Kaufmann Publishers: Burlington, MA, USA, 1993. [Google Scholar]
- Breiman, L.; Friedman, J.; Stone, C.J.; Olshen, R.A. Classification and Regression Trees; CRC Press: Boca Raton, FL, USA, 1984. [Google Scholar]
- Farid, D.M.; Zhang, L.; Rahman, C.M.; Hossain, M.A.; Strachan, R. Hybrid decision tree and naïve Bayes classifiers for multi-class classification tasks. Expert Syst. Appl. 2014, 41, 1937–1946. [Google Scholar] [CrossRef]
- Wang, Y.; Xia, S.-T. Unifying attribute splitting criteria of decision trees by Tsallis entropy. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017. [Google Scholar]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Geurts, P.; Ernst, D.; Wehenkel, L. Extremely randomized trees. Mach. Learn. 2006, 63, 3–42. [Google Scholar] [CrossRef]
- Rodriguez, J.J.; Kuncheva, L.I.; Alonso, C.J. Rotation forest: A new classifier ensemble method. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 1619–1630. [Google Scholar] [CrossRef] [PubMed]
- Jolliffe, I. Principal Component Analysis; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2002. [Google Scholar]
- Friedman, J.H. Greedy function approximation: A gradient boosting machine. Ann. Stat. 2001, 29, 1189–1232. [Google Scholar] [CrossRef]
- Friedman, J.H. Stochastic gradient boosting. Comput. Stat. Data Anal. 2002, 38, 367–378. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. Xgboost: A scalable tree boosting system. In Proceedings of the 22nd ACM Sigkdd International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016. [Google Scholar]
- Kohonen, T. The self-organizing map. Neurocomputing 1998, 21, 1–6. [Google Scholar] [CrossRef]
- Jordan, J.; Angelopoulou, E. Hyperspectral image visualization with a 3-D self-organizing map. In Proceedings of the Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS’13), Gainesville, FL, USA, 26–28 June 2013. [Google Scholar]
- Couronne, T.; Beuscart, J.-S.; Chamayou, C. Self-Organizing Map and social networks: Unfolding online social popularity. arXiv, 2013; arXiv:1301.6574. [Google Scholar]
- Vaishnavee, K.B.; Amshakala, K. Study of Techniques used for Medical Image Segmentation Based on SOM. Int. J. Soft Comput. Eng. 2014, 5, 44–53. [Google Scholar]
- Peura, M. The self-organizing map of trees. Neural Process. Lett. 1998, 8, 155–162. [Google Scholar] [CrossRef]
- Rauber, A.; Merkl, D.; Dittenbach, M. The growing hierarchical self-organizing map: Exploratory analysis of high-dimensional data. IEEE Trans. Neural Netw. 2002, 13, 1331–1341. [Google Scholar] [CrossRef] [PubMed]
- Koikkalainen, P.; Horppu, I. Handling missing data with the tree-structured self-organizing map. In Proceedings of the IJCNN 2007 International Joint Conference on Neural Networks, Orlando, FL, USA, 12–17 August 2007. [Google Scholar]
- Moosmann, F.; Nowak, E.; Jurie, F. Randomized clustering forests for image classification. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 1632–1646. [Google Scholar] [CrossRef] [PubMed]
- Marée, R.; Geurts, P.; Wehenkel, L. Towards generic image classification using tree-based learning: An extensive empirical study. Pattern Recognit. Lett. 2016, 74, 17–23. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Stallkamp, J.; Schlipsing, M.; Salmen, J.; Igel, C. The German traffic sign recognition benchmark: A multi-class classification competition. In Proceedings of the 2011 International Joint Conference on Neural Networks (IJCNN), San Jose, CA, USA, 31 July–5 August 2011. [Google Scholar]
- Enzweiler, M.; Gavrila, D.M. Monocular pedestrian detection: Survey and experiments. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 2179–2195. [Google Scholar] [CrossRef] [PubMed]
- Li, F.-F.; Fergus, R.; Perona, P. Learning generative visual models from few training examples: An incremental bayesian approach tested on 101 object categories. Comput. Vis. Image Underst. 2007, 106, 59–70. [Google Scholar]
- Arlot, S.; Celisse, A. A survey of cross-validation procedures for model selection. Stat. Surv. 2010, 4, 40–79. [Google Scholar] [CrossRef]
- Bradski, G.; Kaehler, A. Learning OpenCV: Computer Vision with the OpenCV Library; O’Reilly Media, Inc.: Sevastopol, CA, USA, 2008. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets | C4.5 | UTCDT1 | UTCDT2 | NBT | CART | L-Tree | Opt-L-Tree |
|---|---|---|---|---|---|---|---|
| MNIST | 0.7893 | 0.8249 | 0.8286 | 0.8149 | 0.8648 | 0.8646 ± 0.0092 | 0.9156 ± 0.0027 |
| GTSRB | 0.0592 | 0.2644 | 0.2644 | 0.1290 | 0.4169 | 0.7144 ± 0.0057 | 0.8463 ± 0.0040 |
| DMPB | 0.5701 | 0.5872 | 0.5872 | 0.5613 | 0.7258 | 0.7056 ± 0.0079 | 0.7421 ± 0.0043 |
| Caltech101 | 0.0667 ± 0.0066 | 0.1316 ± 0.0040 | 0.1271 ± 0.0040 | 0.1127 ± 0.0132 | 0.1190 ± 0.0230 | 0.2182 ± 0.0103 | 0.2228 ± 0.0136 |
| Datasets | Bag (C4.5) | Bag (UTCDT1) | Bag (NBT) | Bag (CART) | RandF | RotF | ERT | Bag (L-Tree) | Bag (Opt-L-Tree) |
|---|---|---|---|---|---|---|---|---|---|
| MNIST | 0.8684 ± 0.0026 | 0.9053 ± 0.0073 | 0.9026 ± 0.0049 | 0.9322 ± 0.0042 | 0.9417 ± 0.0067 | 0.9366 ± 0.0021 | 0.9389 ± 0.0000 | 0.9630 ± 0.0066 | 0.9717 ± 0.0025 |
| GTSRB | 0.0760 ± 0.0278 | 0.3779 ± 0.0051 | 0.3234 ± 0.0043 | 0.4910 ± 0.0025 | 0.6428 ± 0.0058 | 0.6196 ± 0.0049 | 0.6658 ± 0.0000 | 0.9127 ± 0.0041 | 0.9583 ± 0.0052 |
| DMPB | 0.5839 ± 0.0079 | 0.5711 ± 0.0081 | 0.5744 ± 0.0043 | 0.7624 ± 0.0033 | 0.7790 ± 0.0039 | 0.7901 ± 0.0017 | 0.7767 ± 0.0000 | 0.8272 ± 0.0038 | 0.8384 ± 0.0039 |
| Caltech101 | 0.0933 ± 0.0165 | 0.2386 ± 0.0680 | 0.2438 ± 0.0185 | 0.1609 ± 0.0306 | 0.1816 ± 0.0461 | 0.1843 ± 0.0335 | 0.3260 ± 0.0072 | 0.3806 ± 0.0176 | 0.3896 ± 0.0146 |
| Phase | C4.5 | UTCDT1 | NBT | CART | RandF | RotF | ERT | L-Tree | Opt-L-Tree |
|---|---|---|---|---|---|---|---|---|---|
| Train (s) | 28.62 | 14.58 | 19.33 | 10.68 | 0.49 | 37.51 | 3.14 | 10.32 | 119.98 |
| Test (µs) | 3.14 | 2.28 | 2.12 | 1.96 | 1.42 | 417.37 | 0.74 | 17.02 | 13.56 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, J.; Song, E.; Lee, S. L-Tree: A Local-Area-Learning-Based Tree Induction Algorithm for Image Classification. Sensors 2018, 18, 306. https://doi.org/10.3390/s18010306
Choi J, Song E, Lee S. L-Tree: A Local-Area-Learning-Based Tree Induction Algorithm for Image Classification. Sensors. 2018; 18(1):306. https://doi.org/10.3390/s18010306
Chicago/Turabian StyleChoi, Jaesung, Eungyeol Song, and Sangyoun Lee. 2018. "L-Tree: A Local-Area-Learning-Based Tree Induction Algorithm for Image Classification" Sensors 18, no. 1: 306. https://doi.org/10.3390/s18010306
APA StyleChoi, J., Song, E., & Lee, S. (2018). L-Tree: A Local-Area-Learning-Based Tree Induction Algorithm for Image Classification. Sensors, 18(1), 306. https://doi.org/10.3390/s18010306