1. Introduction
Advancements in micro-electromechanical systems (MEMS) technologies have made magnetic and inertial sensors more and more accurate, lightweight and low-cost, which has greatly promoted their usage in human motion analysis. These applications include walking speed estimation [
1], gait analysis [
2], pedestrian dead-reckoning (PDR) [
3], activity classification [
4], etc. Accurate sensor orientation is critical for these applications, and hence many studies endeavor to accurately estimate the sensor orientation [
5,
6,
7,
8,
9]. Typically, a magnetic and inertial measurement unit (MIMU) is usually composed of a tri-axial accelerometer, a tri-axial gyroscope and a tri-axial magnetometer. The sensor orientation consists of roll, pitch and yaw in Euler angles representation, where roll and pitch are also called attitude, while yaw is called heading. In quasi-static condition and in a magnetically clean environment, the attitude of a sensor can be calculated from the measured gravitational acceleration, and the heading can be calculated from the measured geomagnetic field. Meanwhile, the attitude and heading can also be updated by angular velocity integration based on gyroscope measurements. However, each sensor has its own limitations, and these sensors may yield poor results when used alone due to the different characteristics of the magnetic and the inertial sensors [
10]. On the one hand, accelerometers measure not only the gravitational acceleration, but also acceleration caused by motion. Hence, any motion of the sensor will cause an orientation estimation error. On the other hand, gyroscope-based orientation updates suffer from gyro integration drifts, and therefore the orientation error caused by integration tends to increase with time. Besides, magnetometer measurements are easily distorted by the so-called hard-iron and soft-iron magnetic distortions [
11], which thereby affect the orientation estimation. To improve the orientation estimation accuracy, sensor fusion is necessary, where accelerometer and magnetometer measurements are used for compensating the drift during gyroscope data integration, and provide an absolute 3D orientation with respect to a common reference frame [
5,
12,
13,
14].
Accurate sensor orientation estimation is still a challenging task, and one of the limiting factors is the influence of magnetic disturbance on the magnetometer. In recent years, many researchers have focused on eliminating the negative effects of the magnetic disturbance [
8,
9,
15,
16]. De Vries et al. evaluated the magnetic distortion and its impact on the orientation estimation of a MIMU in a motion analysis labs [
17], suggestions for eliminating its negative effects were given; Palermo et al. assessed the indoor magnetic distortion effects on gait analysis performed with wearable inertial sensors [
18]; Robert-Lachaine et al. analyzed the effects of local magnetic field disturbances on the accuracy of magnetic and inertial sensors [
19]. Commonly, these three studies analyze the effects of magnetic disturbance from the application perspective, where the sensor fusion methods were regarded as black boxes. Hence, the exact effects of the magnetic disturbance on the orientation of a given sensor fusion method were still unclear. Suh et al. proposed a quaternion-based indirect Kalman filter discarding pitch and roll information derived from magnetic sensors [
15]. This work mainly focused on avoiding the influence of magnetic disturbance on pitch and roll estimations, no special treatment has been implemented to eliminate the negative effects on yaw estimation. Ligorio et al. presented a benchmarking procedure to assess the performance of sensor fusion methods [
10], two Kalman-based sensor fusion algorithms were compared through the proposed procedure. The results recommended decoupling the attitude estimation from the magnetometer. However, the methods of eliminating the effect on yaw angle were not discussed. Bergamini et al. investigated the effectiveness of sensor fusion methods under different experimental conditions [
20], with different time duration, presence/absence of static phases and etc. The representative stochastic (Extended Kalman Filter) and complementary (Non-linear observer) filters were analyzed. However, the magnitude or the dip angle of the magnetic disturbance were not presented in the results, and the magnetic disturbance in the test condition was not discussed quantitatively. Therefore, it is not clear about the exact influence of magnetic disturbance on the attitude and heading estimations. In short, these studies enable one to gain some information about magnetic disturbance, but still not in a systematic way. To better understand this problem and gain more insights, a comprehensive understanding of the existing methods on reducing the effect of magnetic disturbance is essential.
Recently, Ligorio and Sabatini reviewed the popular strategies to deal with the magnetic field disturbances in human motion analysis [
21]. The authors summarized the magnetic-free attitude estimation methods, threshold-based approaches and model-based approaches for magnetic disturbance rejection. Through the experimental results of manual routine task and gait task test, the authors concluded that the model-based approach represented the best compromise. This review well summarized the popular approaches and analyzed the features of each method. However, some limitations exist in the review: (1) the magnetic disturbances in the experiments only contain short time (10 s) disturbance and periodic magnetic disturbance. As the disturbance conditions were not systematically designed, the weaknesses of a given algorithm may not be exposed. (2) The selected methods are the combinations the single-frame methods (TRIAD and QUEST) and magnetic disturbance rejection approaches (threshold-based and model-based), and they are all based on linear Kalman filter. However, other popular methods are not discussed, including gradient descent algorithm, improved explicit complimentary filter and extended Kalman Filter. Although the issues of magnetic disturbance become well known, no agreement on well-accepted strategies and the evaluation procedures has been reached. Therefore, a new up-to-date review on the effect of magnetic disturbance is necessary. In addition, in order to objectively assess the performance of MIMU in dealing with magnetic disturbance, a set of standardized evaluation procedures mimicking practical application scenarios are also essential.
The main contributions of this paper are summarized as follows: (1) we systematically review four major components of reducing the effects of magnetic disturbance on attitude and heading; (2) we propose a set of standardized testing methods for objectively evaluating the performance of sensor fusion method in a magnetically distorted environment; (3) we perform a comparison study with several well-known sensor fusion methods, and provide suggestions for selecting a proper sensor fusion algorithms (SFA) or developing new sensor fusion methods. The results of this work will lead to a better understanding of the effects of magnetic disturbance on the attitude and heading estimation. The rest of this paper is organized as follows: in
Section 2, the major components dealing with magnetic disturbance are reviewed and analyzed. The standardized testing procedure and the aim of each test are introduced in
Section 3. Results and discussion are provided in
Section 4 and
Section 5, respectively. Finally, in
Section 6, conclusion and future work are presented.
2. Sensor Fusion Methods Based on Magnetic and Inertial Sensor
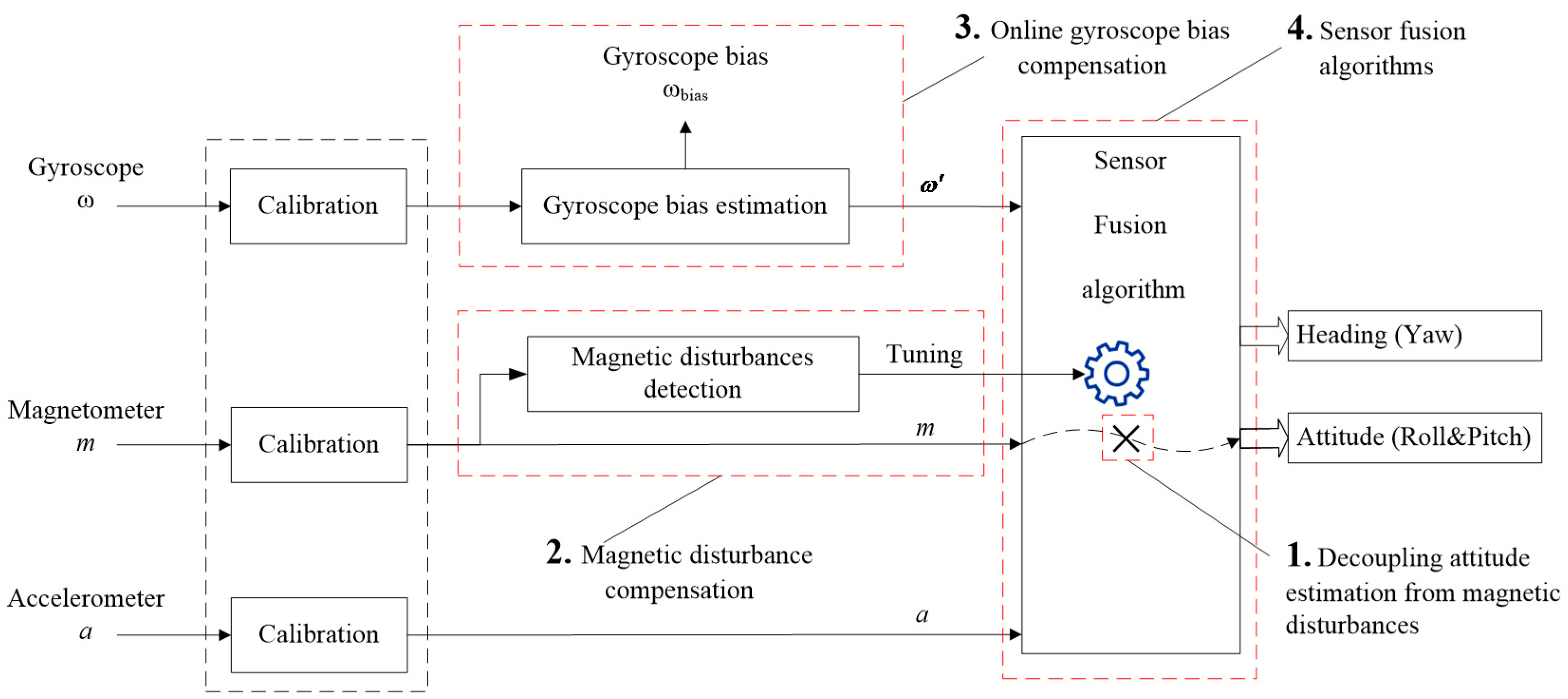
For most sensor fusion methods, the block diagram can be summarized as shown in
Figure 1. It can be seen that all the raw sensor data are calibrated first. Especially for a gyroscope, its calibration parameters consist of constant bias, scaling factor and bias instability [
22]. The constant bias and scaling factor are determined during factory calibration, while the bias instability is removed by on-line gyro bias compensation. The calibrated magnetic field, acceleration and the compensated gyroscope data are fed to SFAs for sensor fusion. Meanwhile, the measured magnetic field is also used for magnetic disturbance detection, so the magnetic disturbance can be compensated through tuning the parameters contained in SFAs according to the detected result. In addition, in order to avoid the negative effect of magnetic disturbance on attitude, attitude estimation should be immune to magnetic disturbance, which has become an important part in SFAs.
In the last decade, the main work in this field focused on proposing new SFAs. The Kalman filter and complementary filter have become the most popular SFAs. In recent years, researchers are well aware that SFA is not the only important component in a MIMU when estimating orientation, because the SFA cannot be adapted to various ambient magnetic environments without the assistance of the other three components. This paper focuses on analyzing each of the four key components dealing with magnetic disturbance. The commonly-used methods and their features in each component are reviewed in the following subsections.
2.1. Decoupling Attitude Estimation from Magnetic Disturbance
Generally, an accelerometer and gyroscope are sufficient for attitude estimation. When magnetometer data is added in the orientation estimation, a new issue is introduced. For the example of the classic quaternion estimator (QUEST) [
23], attitude estimation is also effected by magnetometer data. In this case, magnetic disturbance will not only directly affect the yaw accuracy, but also degrade the attitude estimation performance. Therefore, it is not desirable to use magnetic data in calculations related to pitch and roll [
24,
25]. The following are common methods used to decouple the attitude (pitch and roll) estimation from magnetic disturbance. Specially, the first two methods are used in the selected SFAs, while the other four methods are not directly used here but they are reviewed for completeness.
2.1.1. TRi-Axial Attitude Determination (TRIAD) Algorithm
TRIAD algorithm is a classic method first presented in [
23], and then has been widely used [
10,
21,
26]. The TRIAD calculates the orientation of the global frame relative to the body frame. First, TRIAD uses two vectors to construct the orthonormal bases in the global frame and in the body frame as Equations (1) and (2):
where
are two nonparallel reference unit vectors in the global frame;
are the corresponding observation normalized vectors measured in the body frame.
These triads are then used to create measurement and reference matrices. The orientation of the global frame relative to the body frame
can be calculated by Equation (3):
In the TRIAD algorithm, the first vector is the dominant vector. Therefore, when using the TRIAD algorithm to calculate the orientation, the more reliable acceleration is used as the first vector, while the problematic magnetometer data is used as the second vector. The reference vectors can be expressed as:
where
is the gravitational acceleration and
is the local geomagnetic field;
denotes the normalized acceleration measured in the body frame;
are the vectors calculated using Equation (2).
Hence, the calculated orientation
according to Equation (3). Then, the Euler angles can be calculated as Equation (4):
It can be seen that pitch and roll are determined only by the components (bold font) related to gravitational acceleration, , and therefore they are immune to magnetic disturbance.
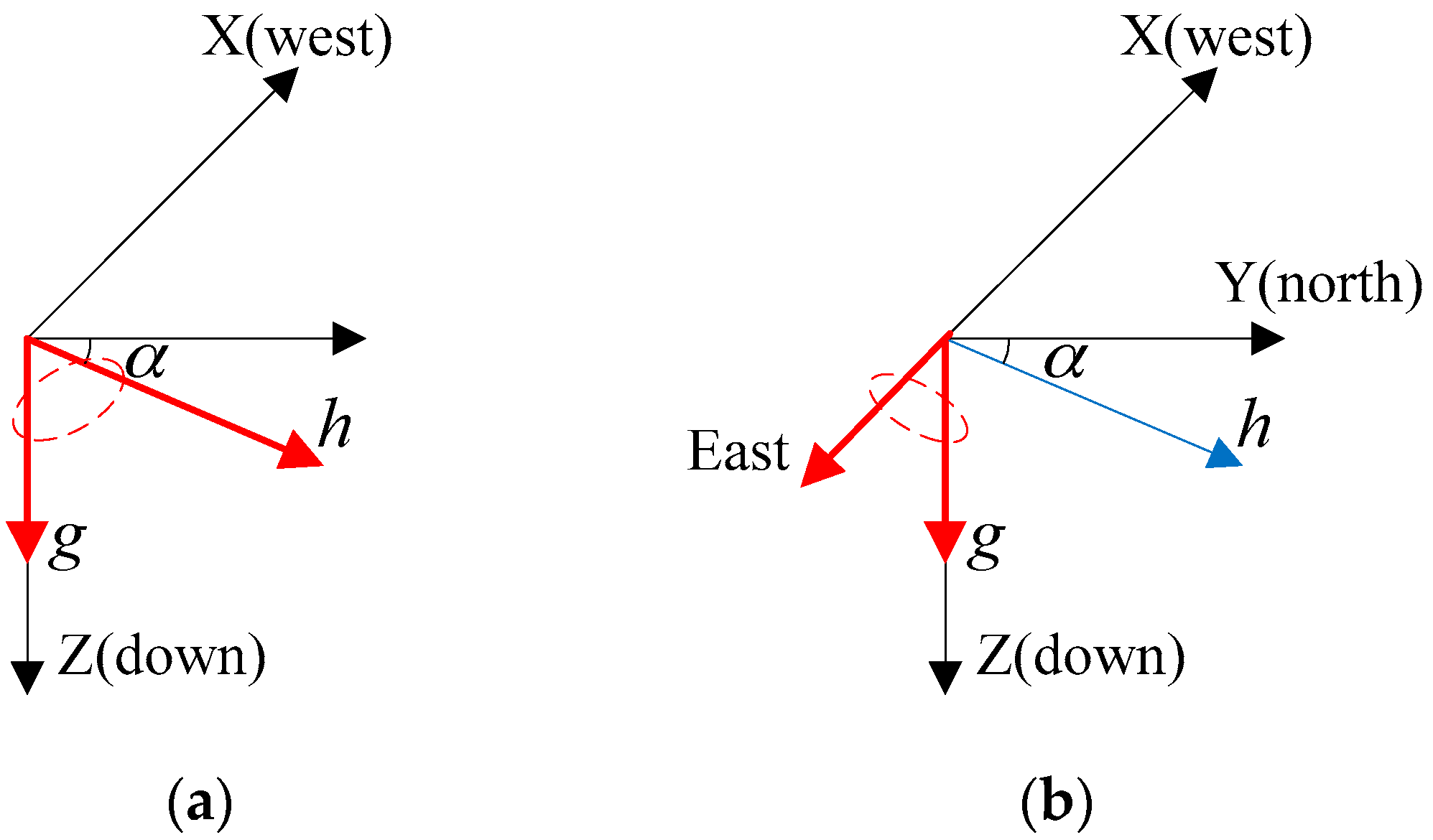
2.1.2. Construct A New Reference Vector Instead of Geomagnetic Field
Decoupling of input signals of accelerometer and magnetometer is an innovative method that prevents the attitude estimation from the influence of magnetic disturbance. Martin and Salaun proposed a simple solution by creating another inertial vector as the cross product of the gravitational acceleration,
, and the Earth’s magnetic field,
[
25,
27,
28]. The corresponding “virtual” measurement is based on the cross product of accelerometer,
, and magnetometer measurements,
. More specifically, the following vectors are calculated, using virtual East
as the reference vector instead of the Earth’s magnetic field, and using
as the corresponding measurement vector instead of magnetometer measurements. The constructed new reference vectors are also shown in
Figure 2.
This method decouples attitude and heading estimation from the input signals of accelerometer and magnetometer, and it does not require any changes in the SFA when applied to explicit complementary filter [
25]. This is a simple and effective solution to make attitude immune to magnetic disturbance with no need for complex algebraic derivation.
2.1.3. Other Commonly-Used Decoupling Methods
(a) Two-Step Orientation Estimation
There are several two-step orientation estimation implementations [
15,
29,
30,
31]. The general concepts of most existing two-step methods are similar.
Figure 3 shows the block diagram of a typical two-step orientation estimation method [
29]. The method breaks the measurement update process into two steps: (1) estimates pitch and roll using acceleration and angular velocity; (2) estimates yaw angle with the estimated pitch, roll and the magnetometer data. Apparently, pitch and roll estimations have no relationship with magnetometer reading.
The main advantage of this method is that it does not require too much complex algebraic derivation and modification of the basic sensor fusion algorithms. Both Kalman filter and complementary filter based SFAs can be adopted to achieve two-step orientation estimation, but it may be unnecessary to use this method if one-step estimation method can achieve the feature, that attitude estimation is immune to magnetic disturbance.
(b) Factored Quaternion Algorithm
Factored quaternion algorithm (FQA) is an algebraic solution to orientation calculation based on quaternion [
24]. This method divides quaternion into three components: roll quaternion, pitch quaternion and yaw quaternion. Each quaternion is described as follows:
Finally, the orientation is calculated through quaternion multiplication:
Through a series of algebraic derivation,
and
can be expressed by equations of the measured acceleration. Hence, pitch and roll estimations are immune to magnetic disturbance. FQA is a single frame approach, and it can be integrated into an complementary filter method [
32].
(c) Algebraic Quaternion Algorithm
Valenti et al. proposed an algebraic quaternion method similar to FQA [
6,
33]. This method divides quaternion into two components: accelerometer quaternion
and magnetometer quaternion
. The orientation can be calculated by Equation (5). The method can also be used in sensor fusion with gyroscope, as described in Equation (6):
where
denotes the orientation of the global frame relative to the body frame.
is the gyroscope update component.
and
are the corrections according to the accelerometer and magnetometer measurements, respectively.
and are the derived expression from measured acceleration. and have only a single degree of freedom: , such that the quaternion multiplication will not influence the pitch and roll. Through this method, pitch and roll estimations are immune to magnetic disturbance.
(d) Arc-Tangent Attitude Solution
Arc-tangent attitude solution [
34] is a method that calculates Euler angles directly, as described by Equations (7) and (8):
where
,
and
denote the X, Y and Z components of the measured acceleration.
represent the X, Y and Z components of the measured magnetic field.
From the Equation (7), it can be seen that pitch and roll are determined only by the measured acceleration. Hence, they are immune to magnetic disturbance. The disadvantage of this method is that the Euler angle’s singularity problem will happen when the pitch is close to ±90°.
2.2. Magnetic Disturbance Compensation
In sensor fusion algorithms, the measured magnetic field is used for yaw correction. When the magnetic field is distorted by ambient ferromagnetic objects, heading errors will inevitably be introduced, but fortunately, headings can also be updated by gyroscope data integration, which is not influenced by magnetic disturbances. Through exploring the potential of gyroscope, the effect of magnetic disturbances can be suppressed. By reviewing the scientific literature, the methods of reducing the influence of magnetic disturbance can be divided into three categories: threshold-based methods, model-based methods and the combination of both methods.
2.2.1. Threshold-Based Methods
Threshold-based methods are also called vector selection methods [
35,
36]. A typical threshold method contains two parts: magnetic disturbance detection and rejection. The detection is the precondition of magnetic disturbance rejection. When the geomagnetic field is distorted by ambient ferromagnetic objects, the magnitude and dip angle would vary drastically. Based on this principle, the magnetic disturbance can be detected by setting thresholds of magnitude, dip angle or both of them. The detection can use the instantaneous value [
35,
36,
37] or the covariance of current magnetic field [
7]. Detection by covariance is considered more stable than that by instantaneous value but requires extra computation.
More precisely, the principle of threshold-based methods can be described as Equation (9), where
is the magnetic field date that is fed to SFA. When detected magnetic disturbance, using predicted magnetic field in place of measured value to reduce error caused by incorrect reference magnetic field:
Threshold-based methods can also be used to adaptively set the measurement covariance in Kalman filter-based methods [
5]. As described in Equation (10), when the magnetic disturbance are detected, the magnetic noise
would be set to infinite, such that the SFA would not trust the magnetometer measurement. This strategy, also called R-adaption, belongs to the class of noise adaptive approaches [
38]:
Threshold-based methods are easy to implement and do not require too much extra computation. However, the threshold is usually not easy to set and the behavior of the algorithm can be somewhat unstable for values close to the set threshold value [
21]. Although this problem can be eliminated by setting two thresholds [
6], it is hard to select a perfect threshold.
2.2.2. Model-Based Methods
Generally, model-based methods are based on the assumption that the magnetic disturbance obeys a specific model and attempts to augment the state vectors in the SFA by adding the magnetic disturbance, such that the magnetic disturbance can be estimated at the same time as the orientation. Roetenberg et al. proposed a complementary Kalman filter to estimate sensor orientation [
9]. In the filter, the magnetic disturbance was modeled as a first order Markov process, and was estimated with the orientation. Sabatini et al. modeled the magnetic disturbance as a first-order Gauss-Markov stochastic process [
26], and then compensated magnetic disturbance using extended Kalman filter. In these ways, the magnetic data does not have to compare with any threshold. The model-based compensation methods avoid the problem of tuning appropriate thresholds. However, when the external disturbance does not obey the proposed sensor model, large errors will be introduced. In practice, it is hard to propose a model that can be adapted to complex ambient magnetic disturbance.
2.2.3. The Combination of Both Threshold-Based Methods and Model-Based Methods
In human motion analysis with magnetic and inertial sensors, the ambient magnetic disturbance is sophisticated. Neither threshold-based methods nor model-based methods can conquer the complex ambient magnetic disturbance alone. In practical applications, sensor fusion method usually combines the model-based method and the threshold-based method, which represents a new research direction. Sabatini et al. proposed a variable-state-dimension extended Kalman filter (VSD-EKF) for estimating the 3D orientation [
39]. This SFA has two models for the magnetic disturbance, one for small disturbance and the other one for large disturbance. The switching rule is based on threshold-based method. Tian et al. proposed an adaptive-gain complementary filter for real-time human motion tracking [
8], in which the threshold-based method is also used as a sub-method. The combination of these two methods can potentially improve the accuracy compared to individual method.
2.3. On-line Gyro Bias Estimation
The accuracy of a gyroscope directly affects the accuracy of yaw estimation, especially in a magnetically distorted environment. In this situation, the magnetic reference vector misses, and the yaw estimation mainly depends on the gyroscope data integration. Suppose that the gyro bias is 0.1°/s, the numerical integration error of angle will increase 6° in every 60 s, causing a significant error. Hence, in an environment with magnetic disturbance, the accuracy of gyroscope is crucial, and therefore the gyro bias needs to be removed. Several studies have concentrated on gyro bias estimation and the commonly-used methods include no-motion gyro bias update method, model-based gyro bias estimation method and low pass filter method.
2.3.1. No-Motion Gyro Bias Update Method
The no-motion gyro bias update method is a simple and valid method for gyro bias estimation. This approach takes the average outputs of the gyro as the bias when the sensor is detected in a static state or moving at constant velocity without rotation [
26], and then the bias-free angular velocity can be obtained by subtracting the bias. This method is only valid when the motion of the sensor contains static state. The disadvantage of this method is that it might omit small amplitude signals in static state and lead to undesirable step changes of the gyro bias between each estimation [
40].
2.3.2. Model-Based Gyro Bias Update Method
This method does not estimate the gyro bias separately, but rather includes the gyro bias into the state vector, thus estimating the gyro bias and the orientation simultaneously. Zhang et al. presented an EKF to estimate the orientation and gyro bias [
41]. The state vector includes not only the quaternion, but also the gyro bias. Roetenberg et al. proposed a complementary Kalman filter based on an error model, the gyro bias error was also included in the model states [
9]. In this way, the gyro bias error was estimated the same time as the orientation.
The stability of the gyro bias is quantified as the minimum Allan variance [
8]. It is a slow-changing signal. Including the gyro bias into the state vector will increase the computational load of orientation estimation. Actually, gyro bias does not need to be updated at such a high frequency as the orientation.
2.3.3. Low-Pass Filter Gyro Bias Update Method
In order to overcome the shortcomings of the no-motion gyro bias update method, and considering that the gyro bias is a slow-varying signal, the gyro bias has been considered as a low frequency noise and estimated by using a low-pass filter [
6,
40]. The low-pass filter is applied only when the sensor is in a steady-state condition, avoiding filtering useful information during dynamic movement. The low-pass filter can be described as Equations (11) and (12):
where
is the gyro bias;
is the corner frequency;
p is static condition; the function
computes the time when the magnitude of each element of
has been below
.
is the minimum static period;
represents the angular velocity;
is the threshold of steady-state condition.
Compared with the no-motion gyro bias update method, the low-pass filter gyro bias update approach reduces the risk of corrupting small amplitude signals and undesirable step changes of the gyro bias. Moreover, it requires less computation compared with a model-based method.
2.4. Selected Representative Sensor Fusion Algorithms (SFAs)
SFA is the core of any sensor fusion method. Researchers have proposed many different SFAs, such as linear Kalman filter, unscented Kalman filter, extended Kalman filter, gradient descent algorithms and explicit complementary filter. In order to enable one to have a better understanding of current well-known SFAs, especially their performance in a magnetically distorted environment, we performed a comparison study with four representative SFAs. The selected SFAs are dual-linear Kalman filter with TRIAD algorithm (DLKF), extended Kalman filter with gyro bias estimation (EKF), gradient descent algorithm (GDA), and the improved explicit complementary filter (IECF). All the selected SFAs are based on quaternion, because the quaternion is arguably the most popular orientation representation and does not exhibit the singularity problem. It can be easily converted to Euler angles and rotation matrix. Euler angle is also used in this paper but mainly for visualization, and its sequence is ‘ZYX’ order.
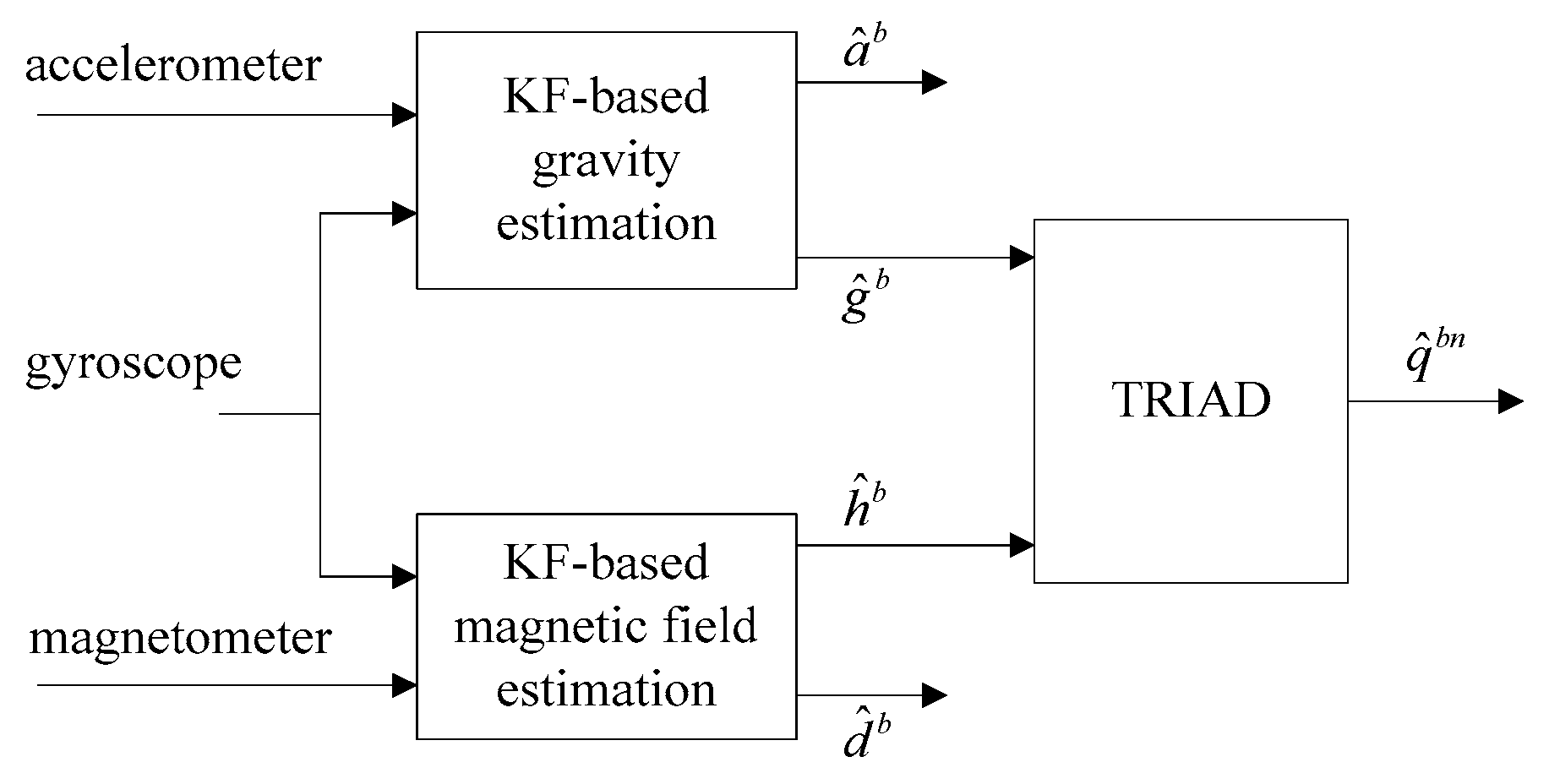
2.4.1. Dual-Linear Kalman Filter with TRIAD Algorithm (DLKF)
Ligorio et al. proposed a linear Kalman filter method for inertial measurement units (IMUs) [
42], and then extended it to MIMU [
21]. As shown in
Figure 4, DLKF is composed of two parallel linear Kalman filters. The estimated Earth’s gravitational and geomagnetic field are then used to calculate the orientation
using TRIAD algorithm. This method is a combination of stochastic approach and deterministic approach. The computational cost of this method is lower than a single extended Kalman filter. Because of the working principle of the TRIAD algorithm, pitch and roll estimations are decoupled from the magnetic reading.
2.4.2. Extended Kalman Filter with Gyro Bias Estimation (EKF)
The extended Kalman Filter method is defined as a set of standard Kalman Filter equations, and it can be simply redefined for various models through the reconstruction of state vector. The EKF estimating the quaternion
, and gyro bias
is a commonly-used SFA [
41,
43,
44], and its state vector is described as Equation (13):
The EKF method with state vector which contains gyro bias can estimate the gyro bias in real time. Compared with the no-motion gyro bias update and low-pass filter methods, this gyro bias estimation method does not require static phases, but increases the computational load. Moreover, because of the principle of EKF [
6], pitch and roll estimations are not decoupled from magnetic disturbances. Another disadvantage of EKF is that it requires to predefine the reference direction of the Earth’s magnetic field [
12], and the inaccuracy of the definition will cause error to yaw angle as well as pitch and roll angles.
2.4.3. Gradient Descent Algorithm (GDA)
Madgwick et al. proposed a gradient descent algorithm for orientation estimation based on IMU and MIMU [
12], and this algorithm invoked extensive attentions. Many researchers use GDA as a basic algorithm to propose further improvement [
37,
45] , or as a comparison algorithm to show the merits of their proposed algorithms [
6,
7,
31]. Indeed, GDA has several advantages, such as low computational cost, no need for defining the reference direction of the earth’s magnetic field and easy tuning. But there are also some well-known shortcomings, such as the pitch and roll estimation are not decoupled from magnetic disturbances [
6,
31,
46], and it contains only one adjustable parameter, which made it hard to find a perfect value for both accelerometer and magnetometer, as the characteristics of them are different.
2.4.4. Improved Explicit Complementary Filter (IECF)
Actually, Madgwick regarded the gradient descent algorithm (GDA) [
12] as a preliminary work of his study. An improved method is presented in his later studies, and it was proved to have better performance [
40]. In this paper, we called it improved explicit complementary filter (IECF). The IECF is designed based on the scheme of Mahony’s explicit complementary filter [
13,
47]. It is an open source algorithms that is employed by a commercially available products x-IMU [
48], and has been used by many users [
40].
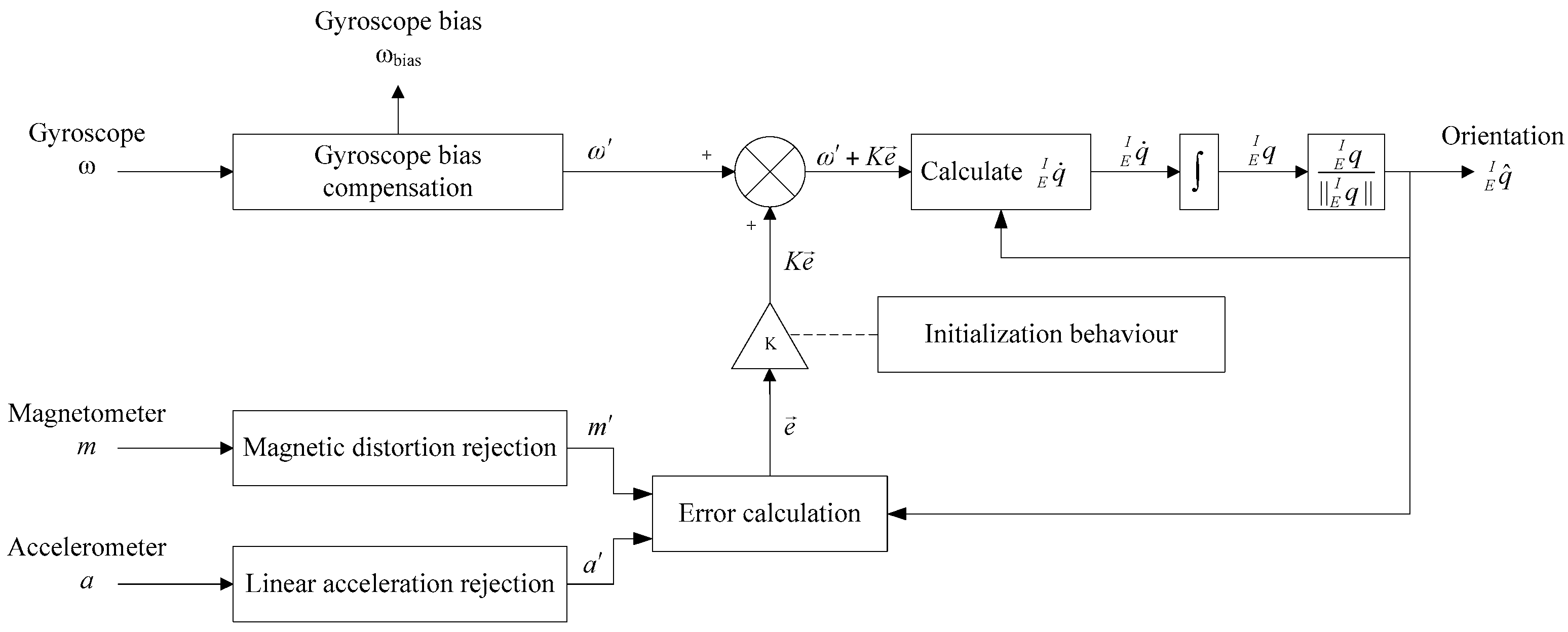
The IECF can be simply described as Equations (14) and (15).
describes the orientation of the earth relative to the IMU, and it is obtained through the integration of the rate of change of the quaternion.
is computed by Equation (15), and it is a function of normalized estimated quaternion,
, the gyroscope measurement
and an error term,
, scaled by the algorithm gain K:
The error
is determined from the accelerometer and magnetometer measurements with each sensor providing a separate error component.
is calculated as the cross product of the normalized measured acceleration and the predict acceleration. While
is calculated as the cross product of the normalized measured east and predict east, as described in
Section 2.1.2. In this way, pitch and roll estimations are decoupled from magnetic reading.
The block diagram of IECF is shown in
Figure 5. In summary, the IECF has following improvements compared with the GDA:
In the initialization period, the algorithm gain K was set to a large value for fast convergence. After initialization, K was set to the smaller normal value. In this way, the initialization time can be reduced.
- 3.
Gyro bias compensation
Gyro bias estimation is considered as an essential part of sensor fusion. IECF performs the gyro bias compensation by the low-pass filter method, as described in
Section 2.3.3. Gyro bias was estimated in a steady condition and then subtracted from the angular velocity.
- 4.
Magnetic distortion rejection
IECF simply validates the magnetic field by setting a threshold range for the magnetometer, any value outside this range will be discarded.
2.4.5. IECF Use only Acceleration and Gyroscope Data (IECF6)
The block diagram of IECF6 is similar to that of IECF. The only difference is that IECF uses nine-axis data from accelerometer, gyroscope and magnetometer, while the IECF6 uses only six-axis data discarding the magnetic information. The IECF6 is intended to be used in a seriously magnetically distorted condition and provides a reference yaw estimation based on the integration of angular velocity. In theory, a good adaptive sensor algorithm should perform as well as IECF6 in a critical magnetically distorted environment but still provide absolute yaw angle.
3. Experimental Setting
In this section, we evaluated the performance of SFAs under different testing conditions. The SFAs were tested using the data collected by a commercially available MIMU, i.e., XSENS MTw (XSENS B.V. Technologies, Enschede, Netherlands) which includes tri-axis accelerometers, gyroscopes, and magnetometers. All the sensors were calibrated before they were delivered, and the magnetometer was recalibrated in the field with its accompanying tool. The raw calibrated sensor data was logged to PC wirelessly at 100 Hz. According to the recommendation in the user manual [
49], the MTw was initialized in a magnetically clean environment and warmed up for several minutes before data collection. In order to ensure sufficient convergence time for the selected off-line SFAs, each dataset contains 20–30 s of data under static condition.
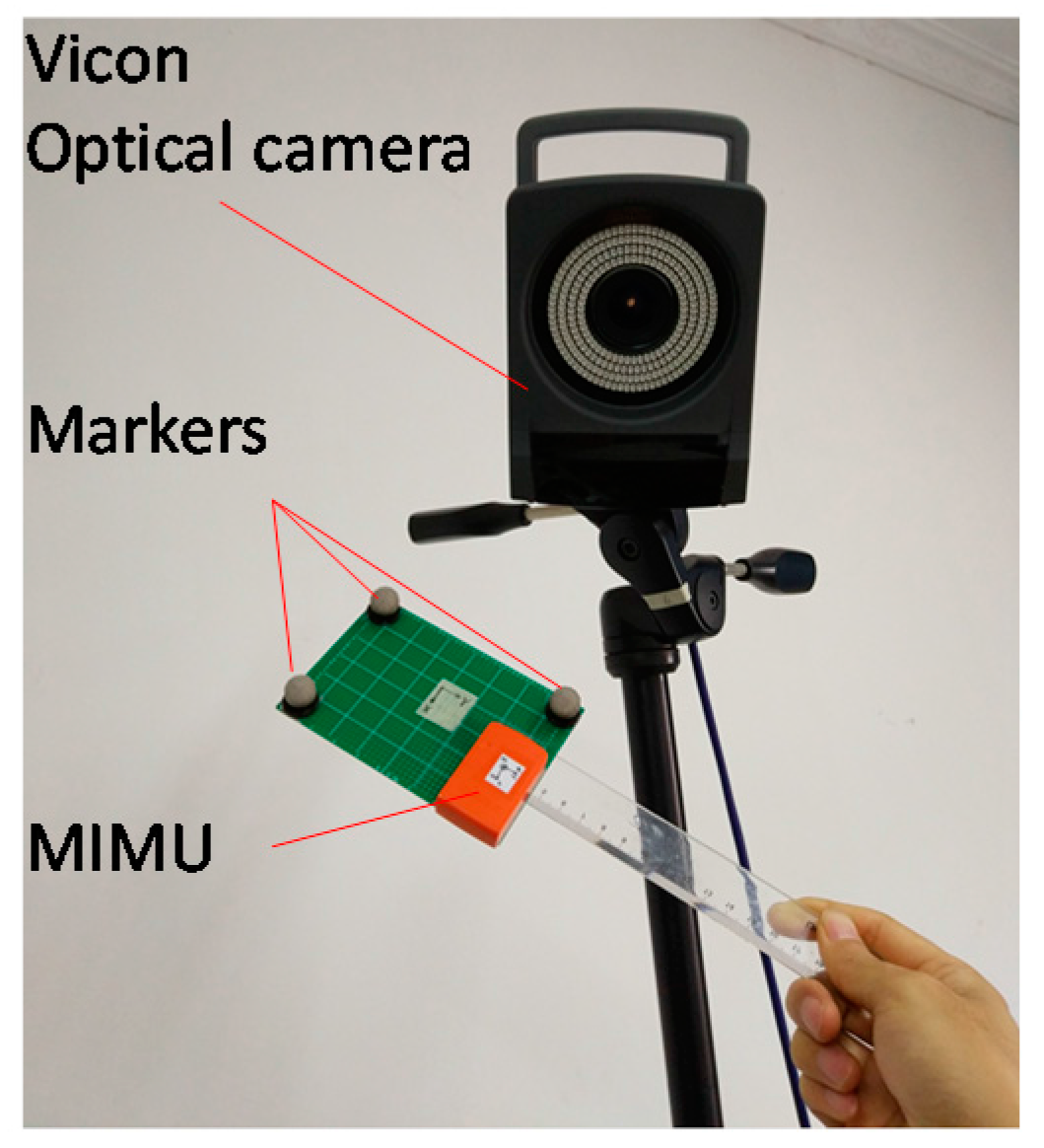
A six-camera optical motion capture system (Vicon T40s, Oxford, UK) served as the gold standard. As shown in
Figure 6, the sensor was attached on a rigid body with three makers. The ground-truth orientation was calculated through the Gram-Schmidt orthogonalization procedure. Both the sample rate of the MIMU and Vicon were set at 100 Hz, and the two systems were time-synchronized manually. The alignment error between the optical motion capture system and MIMU system was compensated using the well-accepted method introduced in [
20,
50]. The principle of this method is to calculate the angular velocities of both devices during an alignment procedure, and then calculate the alignment quaternion between both local frames using an optimization algorithm. The alignment procedure consists of rotations around three more or less orthogonal axes, which can be performed by hands easily. The quaternion estimated by MIMU was multiplied by the alignment quaternion when compared with the quaternion of the optical motion capture.
For all the SFAs except the EKF, the gyro bias is removed through the low pass filter method. The parameters of the low pass filter are
Hz;
;
. The removal of gyro bias is unnecessary for EKF because it has this function. Besides, the parameters of the selected SFAs are set according to the recommend methods introduced in the original literature. The detailed settings for each sensor fusion algorithms are listed in
Table 1.
In order to objectively assess the performance of each algorithm, we intentionally designed five standardized tests, which includes general static, dynamic tests and special tests in different magnetic environments (
Table 2). The objective of each test is listed in the second column, which covers the important factors related to the performance in magnetically distorted environments.
The test scenarios for the proposed standardized tests are shown in
Figure 7, and the detailed experimental protocols are described in the following subsections. In these tests, the magnetically clean environment denotes an indoor place at least 40 cm away from any magnetic sources [
17], and the variation of the magnitude of magnetic field measured by the MIMU is within 2%. The magnitude and dip angle of the magnetic field are plotted to show the severity of the magnetic disturbance, as they are commonly-used indices [
7]. The magnitude is the norm of the magnetometer measurement, and the dip angle
is calculated by Equation (17):
where
is the rotation matrix converted from the estimated orientation of sensor.
is the normalized gravity acceleration, and
is the measured magnetic field.
3.1. Test A: Static and Dynamic Accuracy without Magnetic Disturbance
Static and dynamic accuracy in a magnetically clean environment are the basic specification when evaluating a SFA. Hence, we performed these general tests first. In this scenario, as shown in
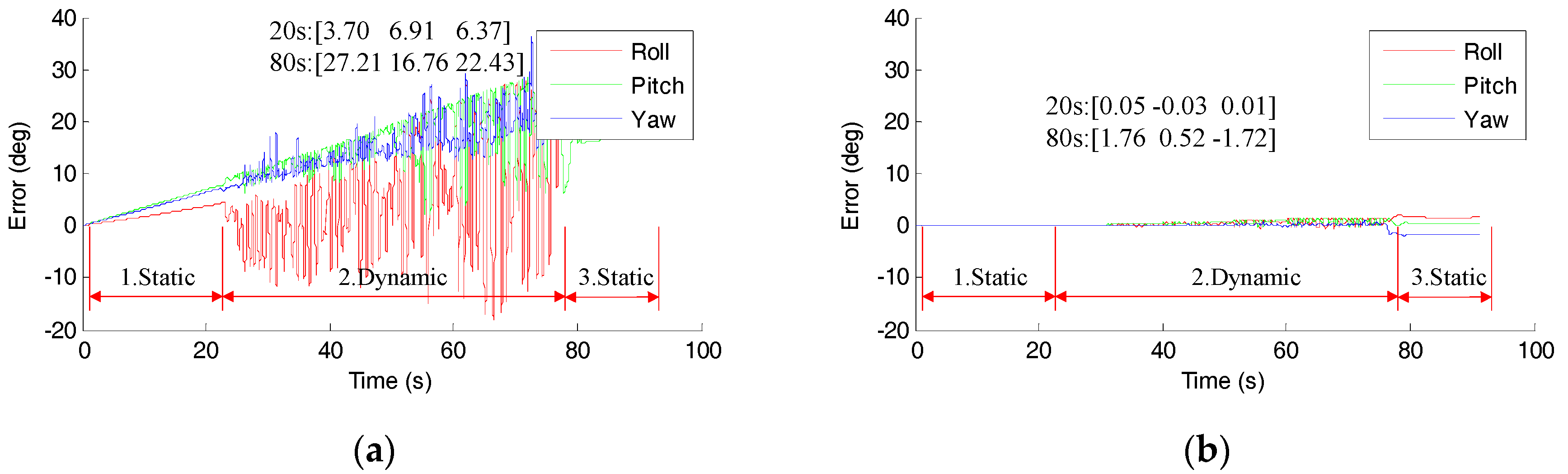
Figure 7a, the MIMU was put in a magnetically clean environment, which was pre-checked by the same MIMU through verifying the measured magnetic field. During the test, the MIMU was rotated manually for about 60 s and each trial was repeated five times. The collected data was fed to different sensor fusion algorithms. The static and dynamic RMSEs of estimated Euler angles and its standard deviations were calculated and compared, with assuming a static condition when the angular velocity measured by the MIMU was <20°/s, and a dynamic condition when ≥ 20°/s. This assumption enabled the MIMU collect more data in static accuracy test. In addition, to demonstrate the importance of the gyro bias removal, we performed orientation estimation using integration method with one of the dynamic dataset. The estimated orientations are compared with the values obtained from the optical motion capture.
3.2. Test B: Pitch and Roll Estimations with Magnetic Disturbance
Whether pitch and roll estimations are decoupled from magnetic disturbance is an important feature for a SFA. In this scenario, as shown in
Figure 7b, the MIMU was kept static in a magnetically clean environment, and then a small magnet was moved closer to the MIMU five times to create a magnetic disturbance. This test lasted about 25 s. The estimated Euler angles of different SFAs were compared directly, to check whether pitch and roll estimations were immune to magnetic disturbance. The maximum deviations of Euler angles were calculated with a comparison to the initial values to quantify the influence the magnetic disturbance. Note that all the adaptive strategies for magnetic disturbance compensation were disabled for assessing the features of the basic sensor fusion algorithms.
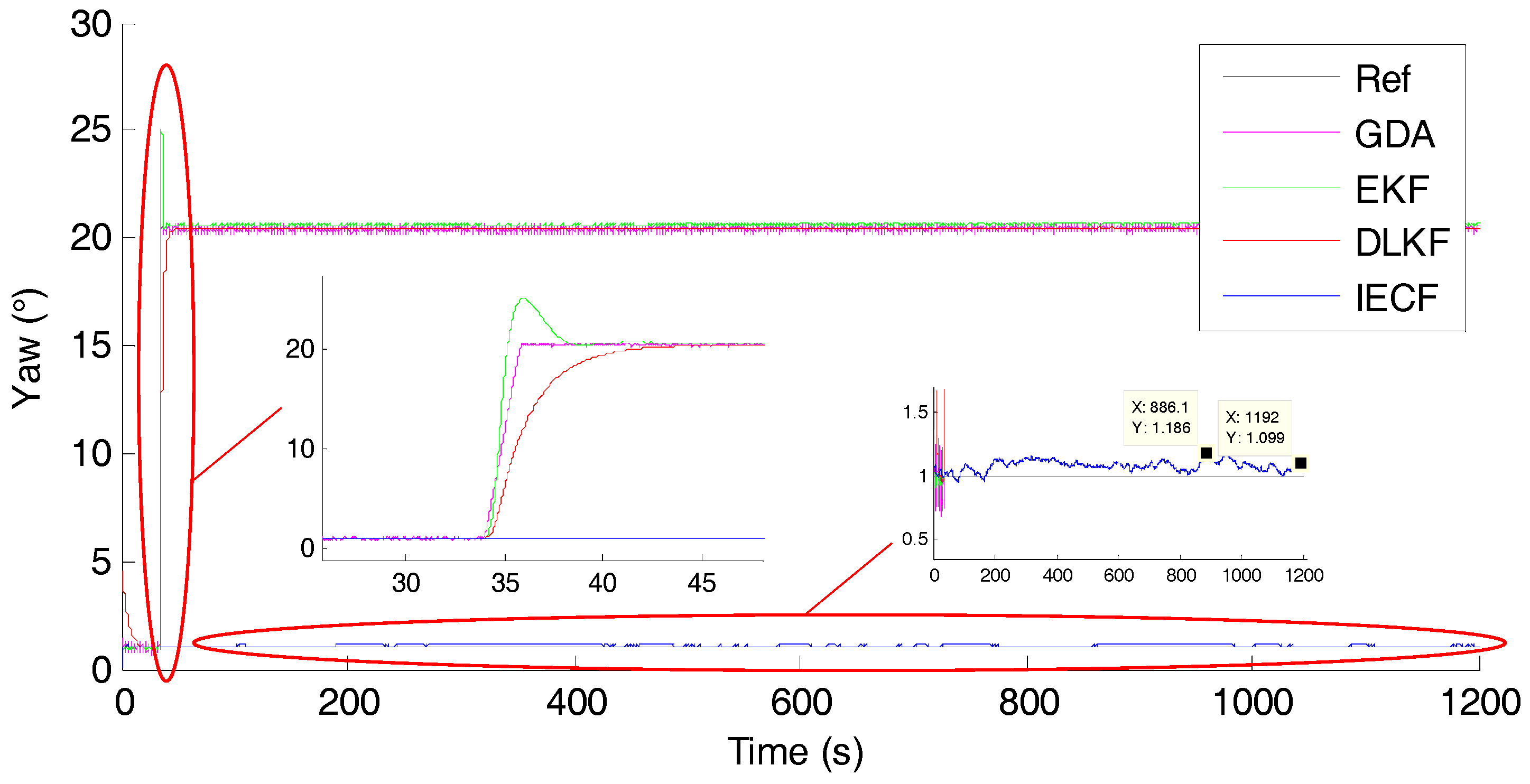
3.3. Test C: Long-Time Stability of Yaw Angle with Continuous Magnetic Disturbance
For human motion analysis with MIMU, the sensor is usually strapped to a body segment and the segments might be moved to a magnetically distorted environment and placed for a while. This will cause long-duration magnetic disturbance. In this situation, the reference vector of yaw angle is distorted. A common strategy is to discard magnetic reading and to estimate yaw angle by numerical integration of angular velocity. In order to quantify the estimation error and check if the gyro bias was removed properly, we designed this test. In this test, as shown in
Figure 7c, the MIMU was initialized in a magnetically clean environment, and then was moved closer to a ferromagnetic material and stayed for about 20 min to mimic long-duration magnetically distorted environment. The deviations of the estimated yaw angles of the SFAs were compared accordingly.
3.4. Test D: Yaw Estimation with Small Magnetic Disturbance in Static Condition
Generally, in our daily-life surroundings, as long as the MIMU is not moved closer to the magnetic disturbance source deliberately, it more likely encounters an environment with small magnetic disturbance. For threshold-based method, it is hard to cope with small magnetic disturbance below the threshold. This distorted magnetic field will be regard as good samples by the algorithm and potentially lead to big yaw error. Thus, creating a small magnetic disturbance scenario can test if a given algorithm can deal with this case properly. In this test, as shown in
Figure 7d, the MIMU was put static on the table, and then a small ferromagnetic material was moved closer to the MIMU and stayed for about 2 min. Meanwhile, we made sure that the amplitude of the disturbance was of small value (less than the threshold) through the observation of the measured magnetic field. The collected sensor data was fed to all the selected SFAs; the estimated yaw angles were compared directly, and the convergence behaviors of different SFAs were analyzed.
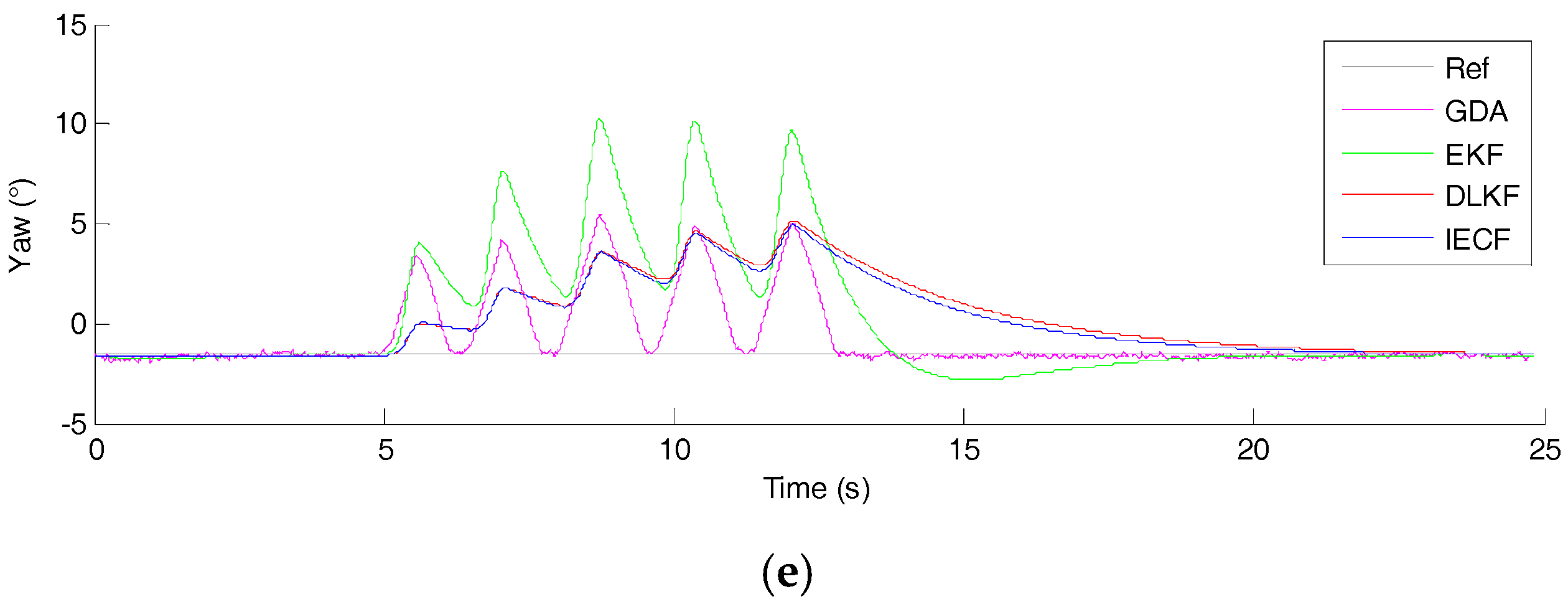
3.5. Test E: Dynamic Accuracy with Continuous Magnetic Disturbance
When we fix a MIMU on a foot to perform gait analysis, the MIMU might be close to ferromagnetic materials contained in the floor of our building, which creates a dynamic condition with continuous magnetic disturbance. Hence, it is essential to test the sensor in this critical condition. For MEMS based gyroscopes, the measurement error grows with the increase of angular velocity. In static condition with continuous magnetic disturbance, as long as the gyro bias was removed properly, yaw angle estimation based on numerical angular velocity integration would not diverge rapidly, but in dynamic conditions with continuous magnetic disturbances, accurate yaw estimation not only requires one to remove gyro bias, but also requires accurate angular velocity measurements. Hence, this test represents the most critical condition for any magnetic disturbance compensation strategies. Moreover, in order to analyze the relationship between error and duration, we created continuous magnetic disturbance with different durations. During the test, as shown in
Figure 7e, there are two positions, where P1 denotes the magnetically clean environment and P2 represents magnetically distorted environment. The action sequence is listed in the
Figure 7e. The MIMU was first initialized at P1, then was moved to P2 and rotated for a certain period, and then was placed at P1 for 20 s. The duration of rotations are 10, 30 and 60 s, respectively. In this way, the short, medium and long magnetic disturbance were mimicked. The collected data was fed to all the selected fusion algorithms. All the SFAs adopted the threshold-based magnetic disturbance rejection method, and the magnitude thresholds were set as 0.05 a.u. This test was repeated five times, and the RMSEs and standard deviations of the Euler angles of different durations were calculated respectively.
6. Conclusions
In this paper, we focus on enabling a better understanding of how magnetic disturbances influence the attitude and heading in a MIMU-based orientation estimation algorithm, as well as the performance of current popular SFAs under standardized test conditions. To do so, we first reviewed four key components dealing with magnetic disturbance and analyzed the common methods used in each component. Then, we selected four representative sensor fusion methods to serve as a comparison study. To objectively evaluate the performance against magnetic disturbance of the selected sensor fusion methods, we propose a set of test scenarios including a series of extreme conditions. Experimental results expose the features of each method. For example, the pitch and roll estimations of GDA and EKF depend on magnetic reading; IECF and DLKF have better performance but still have room to improve.
According to the analysis in this paper, a preferred SFA should have the following features: (1) on-line gyro bias compensation; (2) pitch and roll estimations immunity to magnetic disturbance; (3) adaptive strategies for magnetic disturbance. In addition, in the aspect of yaw accuracy, the preferred SFA had better perform as well as fusion algorithms that fuse accelerometer and gyroscope data, but still provide absolute yaw angles in a seriously magnetically distorted environment. The keys of accurate yaw estimation are to reject the distorted magnetic disturbance as soon as possible and to temporarily lower the convergence speed if the magnetic disturbance is hard to reject. Future work can focus on developing intelligent strategies for compensating the magnetic disturbance and then extending the findings to deal with acceleration distortions.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}