Development of a Multiwavelength Visible-Range-Supported Opto–Ultrasound Instrument Using a Light-Emitting Diode and Ultrasound Transducer


Abstract
:1. Introduction
2. Materials and Methods
3. Results
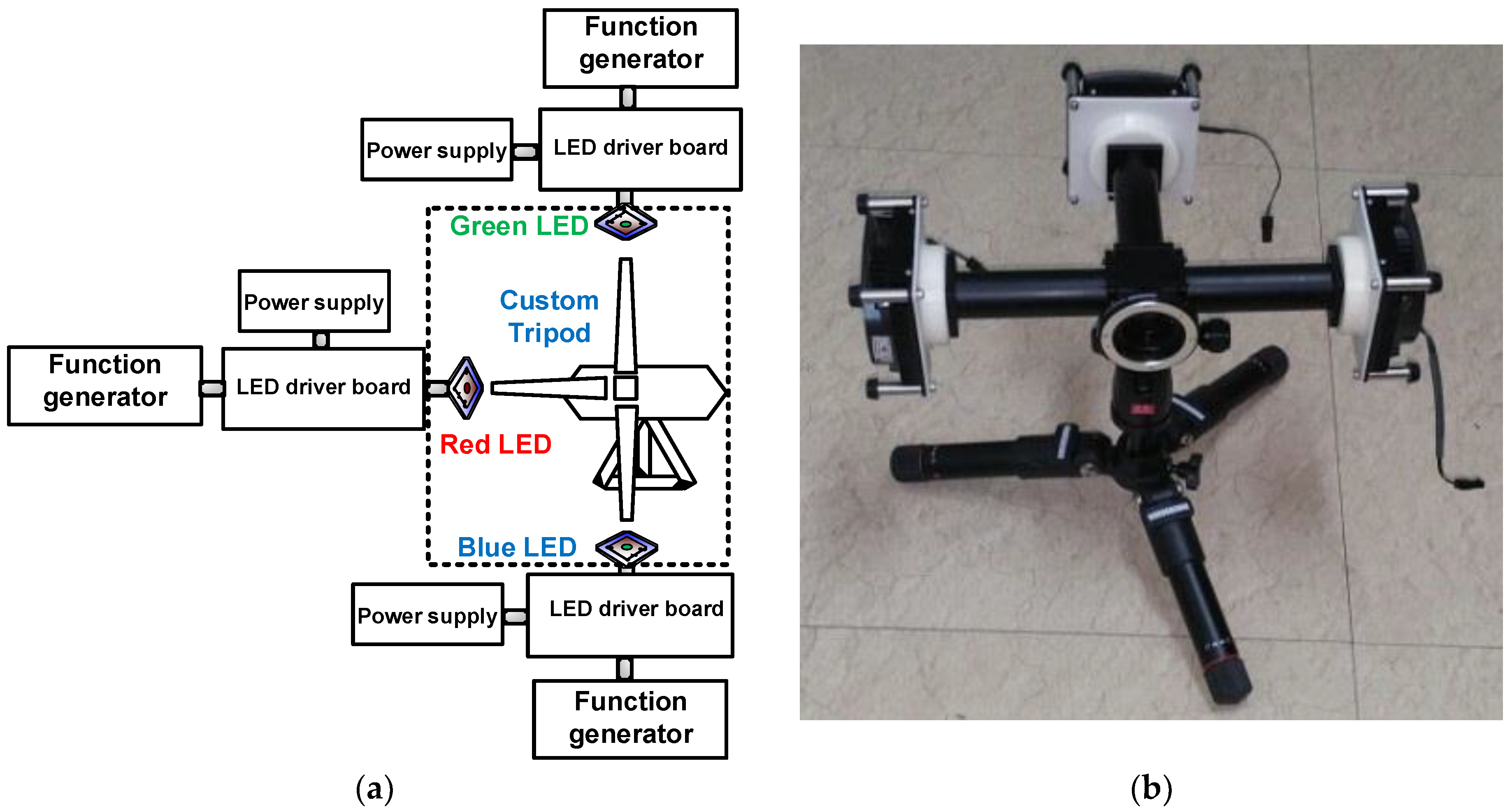
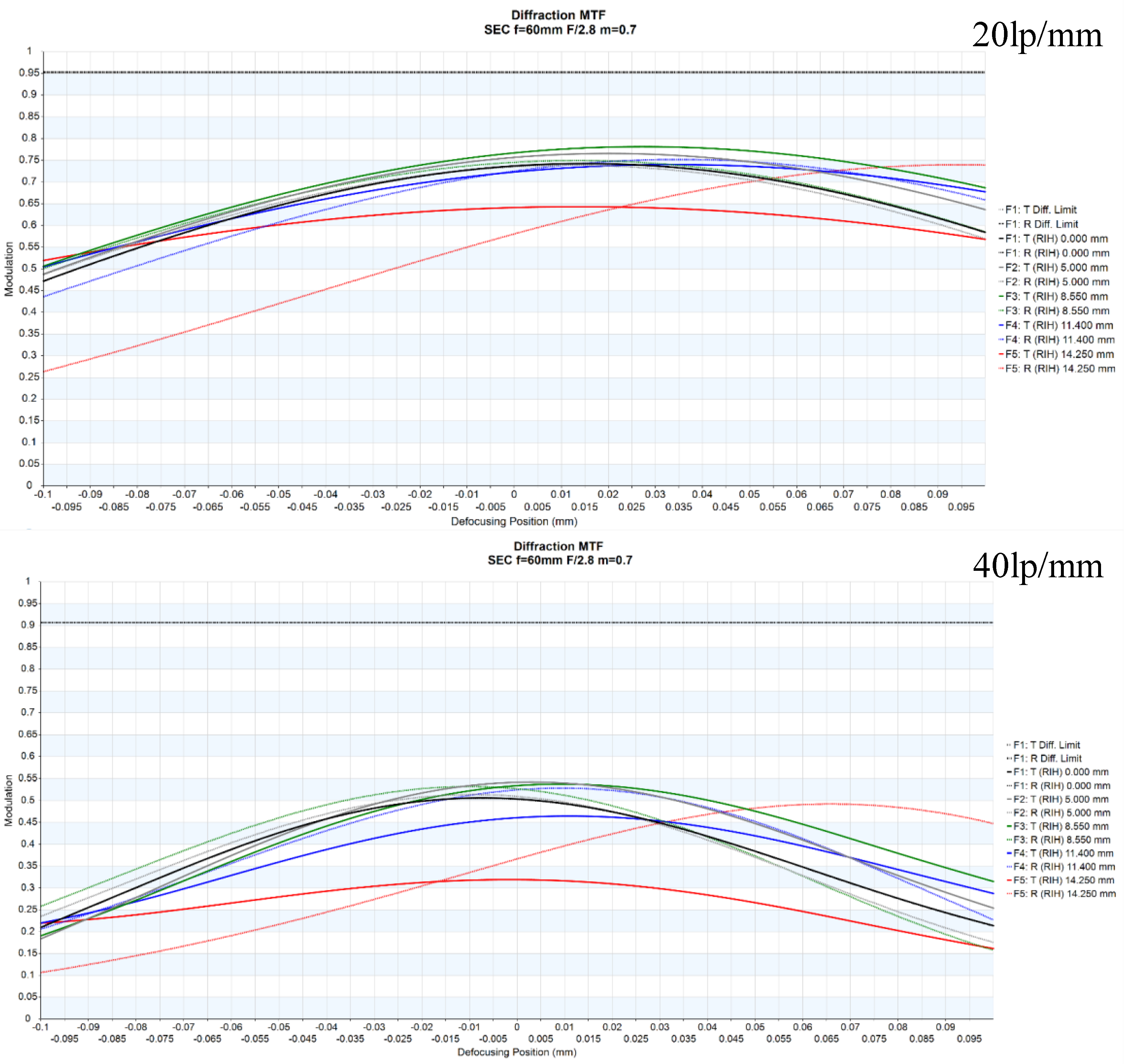
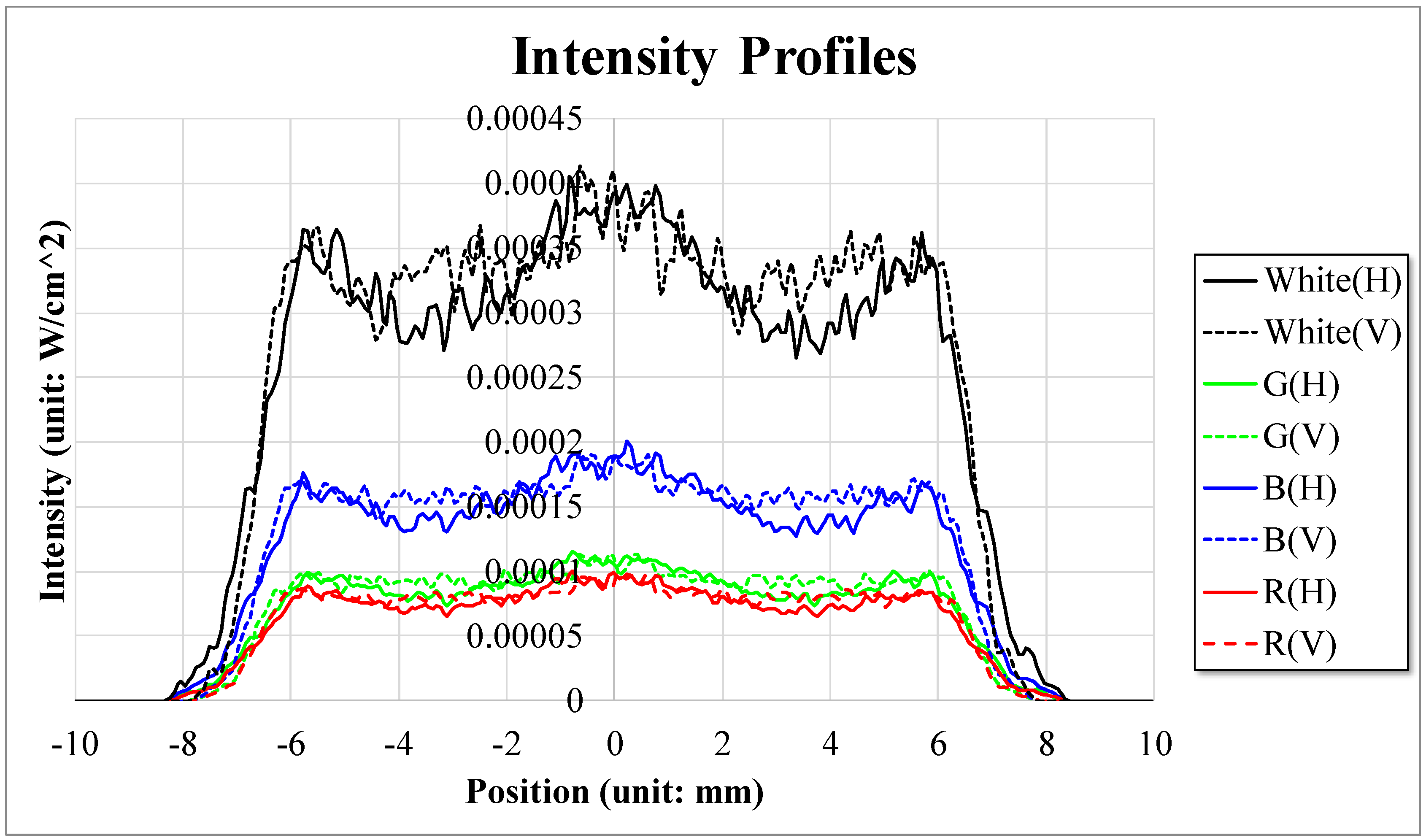
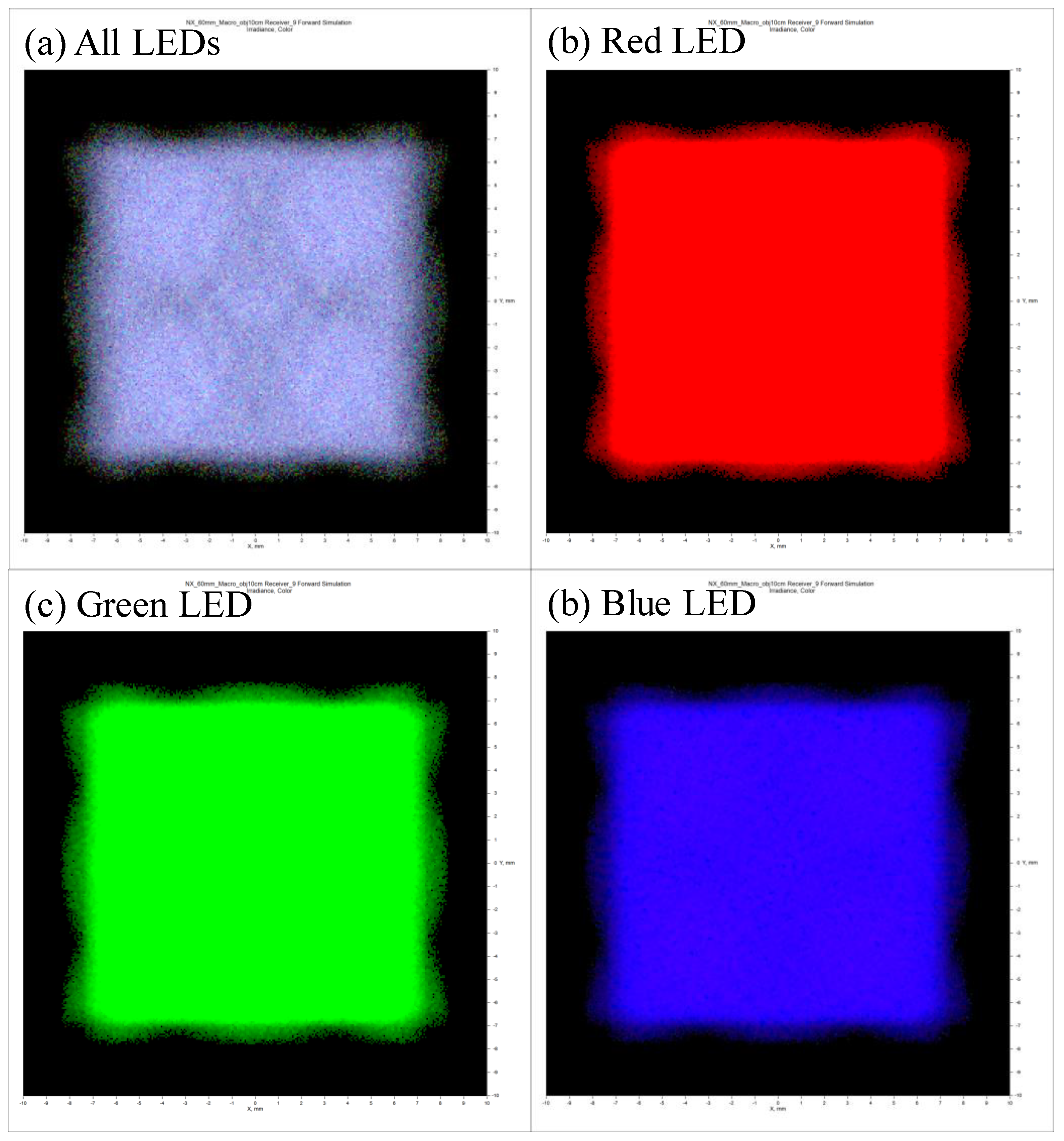
3.1. Performance Verification of the Multiwavelength Visible-Range-Supported LED Transmission System
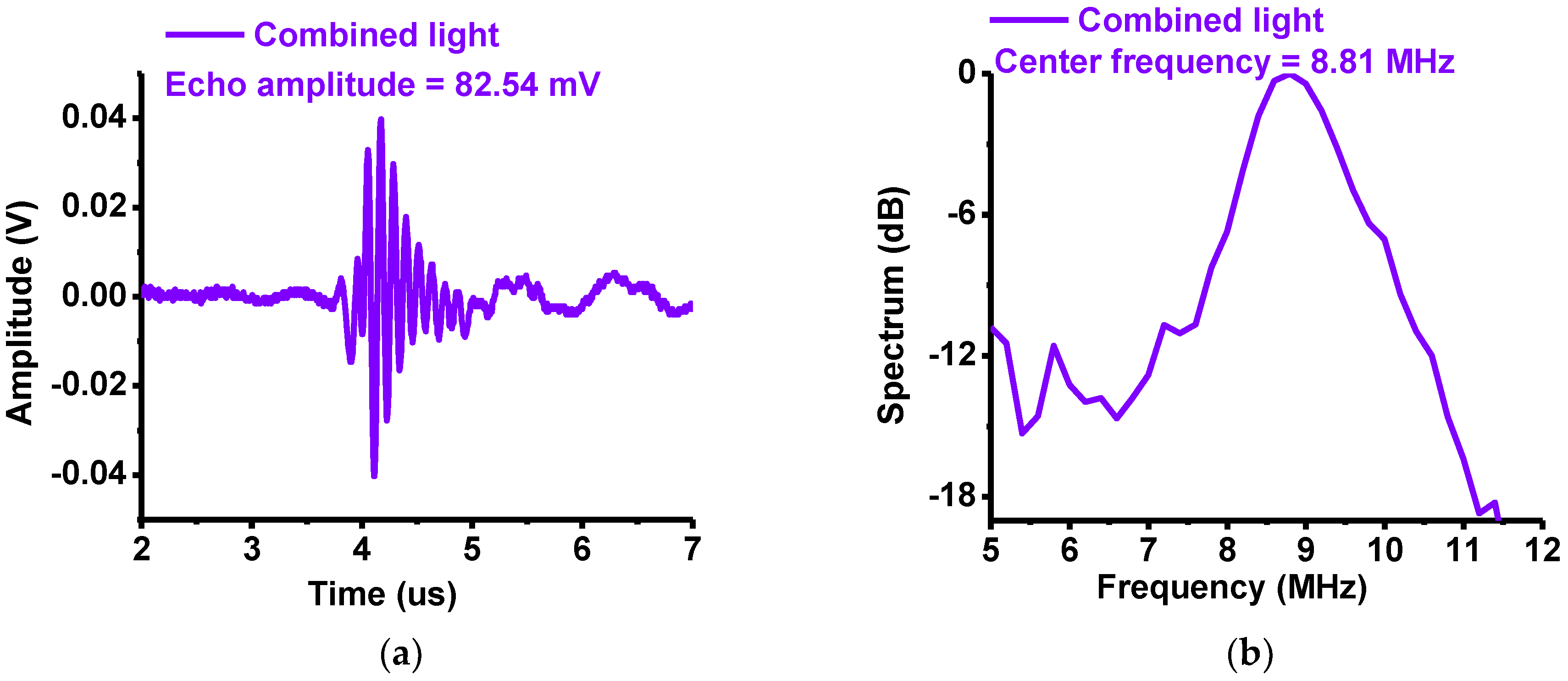
3.2. Pulse–Echo Responses of Multiwavelength Visible-Range-Supported LED–US Instrument
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhou, Q.; Lam, K.H.; Zheng, H.; Qiu, W.; Shung, K.K. Piezoelectric single crystal ultrasonic transducers for biomedical applications. Prog. Mater. Sci. 2014, 66, 87–111. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- He, Z.; Zheng, F.; Ma, Y.; Kim, H.H.; Zhou, Q.; Shung, K.K. A sidelobe suppressing near-field beamforming approach for ultrasound array imaging. J. Acoust. Soc. Am. 2015, 137, 2785–2790. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yan, F.; Li, L.; Deng, Z.; Jin, Q.; Chen, J.; Yang, W.; Yeh, C.-K.; Wu, J.; Shandas, R.; Liu, X.; et al. Paclitaxel-liposome–microbubble complexes as ultrasound-triggered therapeutic drug delivery carriers. J. Control. Release 2013, 166, 246–255. [Google Scholar] [CrossRef] [PubMed]
- Qiu, W.; Wang, X.; Chen, Y.; Fu, Q.; Su, M.; Zhang, L.; Xia, J.; Dai, J.; Zhang, Y.; Zheng, H. A Modulated Excitation Imaging System for Intravascular Ultrasound. IEEE Trans. Biomed. Eng. 2016, 64, 1935–1942. [Google Scholar] [CrossRef] [PubMed]
- Zhu, B.; Han, J.; Shi, J.; Shung, K.K.; Wei, Q.; Huang, Y.; Kosec, M.; Zhou, Q. Lift-off PMN-PT Thick Film for High Frequency Ultrasonic Biomicroscopy. J. Am. Ceram. Soc. 2010, 93, 2929–2931. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Yang, X.; Ding, M.; Yuchi, M. Spatio-temporally smoothed coherence factor for ultrasound imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2014, 61, 182–190. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.V. Photoacoustic Imaging and Spectroscopy; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Li, X.; Wei, W.; Zhou, Q.; Shung, K.K.; Chen, Z. Intravascular photoacoustic imaging at 35 and 80 MHz. J. Biomed. Opt 2012, 17, 106005. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.V.; Wu, H.-I. Biomedical Optics: Principles and Imaging; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Yao, J.; Wang, L.V. Photoacoustic microscopy. Laser Photonics Rev. 2013, 7, 758–778. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nie, L.; Cai, X.; Maslov, K.; Garcia-Uribe, A.; Anastasio, M.A.; Wang, L.V. Photoacoustic tomography through a whole adult human skull with a photon recycler. J. Biomed. Opt. 2012, 17, 110506. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, X.; Pang, Y.; Ku, G.; Xie, X.; Stoica, G.; Wang, L.V. Noninvasive laser-induced photoacoustic tomography for structural and functional in vivo imaging of the brain. Nat. Biotechnol. 2003, 21, 803–806. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brecht, H.-P.; Su, R.; Fronheiser, M.; Ermilov, S.A.; Conjusteau, A.; Oraevsky, A.A. Whole-body three-dimensional optoacoustic tomography system for small animals. BIOMEDO 2009, 14, 064007. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lv, J.; Peng, Y.; Li, S.; Guo, Z.; Zhao, Q.; Zhang, X.; Nie, L. Hemispherical photoacoustic imaging of myocardial infarction: In vivo detection and monitoring. Eur. Radiol. 2018, 28, 2176–2183. [Google Scholar] [CrossRef] [PubMed]
- Sandell, J.L.; Zhu, T.C. A review of in-vivo optical properties of human tissues and its impact on PDT. J. Biophotonics 2011, 4, 773–787. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yao, J.; Wang, L.V. Photoacoustic tomography: Fundamentals, advances and prospects. Contrast Med. Mol. Imaging 2011, 6, 332–345. [Google Scholar] [CrossRef] [PubMed]
- Dougherty, T.J.; Gomer, C.J.; Henderson, B.W.; Jori, G.; Kessel, D.; Korbelik, M.; Moan, J.; Peng, Q. Photodynamic Therapy. J. Natl. Cancer Inst. 1998, 90, 889–905. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jacques, S.L. Optical properties of biological tissues: A review. Phys. Med. Biol. 2013, 58, R37. [Google Scholar] [CrossRef] [PubMed]
- Jo, W.-K.; Tayade, R.J. New generation energy-efficient light source for photocatalysis: LEDs for environmental applications. Ind. Eng. Chem. Res. 2014, 53, 2073–2084. [Google Scholar] [CrossRef]
- Schubert, E.F.; Gessmann, T.; Kim, J.K. Light Emitting Diodes; Wiley Online Library: Hoboken, NJ, USA, 2005. [Google Scholar]
- Cao, R.; Kilroy, J.P.; Ning, B.; Wang, T.; Hossack, J.A.; Hu, S. Multispectral photoacoustic microscopy based on an optical–acoustic objective. Photoacoustics 2015, 3, 55–59. [Google Scholar] [CrossRef] [PubMed]
- Ryu, J.M.; Kim, Y.S.; Jo, J.H.; Kang, G.M.; Lee, H.J.; Lee, H.K. Statistical Analysis of Focus Adjustment Method for a Floating Imaging System with Symmetric Error Factors. Korean J. Opt. Photonics 2012, 23, 189–196. [Google Scholar] [CrossRef] [Green Version]
- Yamaji, K. Progress in Optics; Elsevier, North-Holland: Amsterdam, The Netherlands, 1967. [Google Scholar]
- Bass, M.; Van Stryland, E.W.; Williams, D.R.; Wolfe, W.L. Handbook of Optics; McGraw-Hill: New York, NJ, USA, 2001. [Google Scholar]
- Sharma, K.K. Optics: Principles and Applications; Academic Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Weibao, Q.; Yanyan, Y.; Fu Keung, T.; Lei, S. A multifunctional, reconfigurable pulse generator for high-frequency ultrasound imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 1558–1567. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
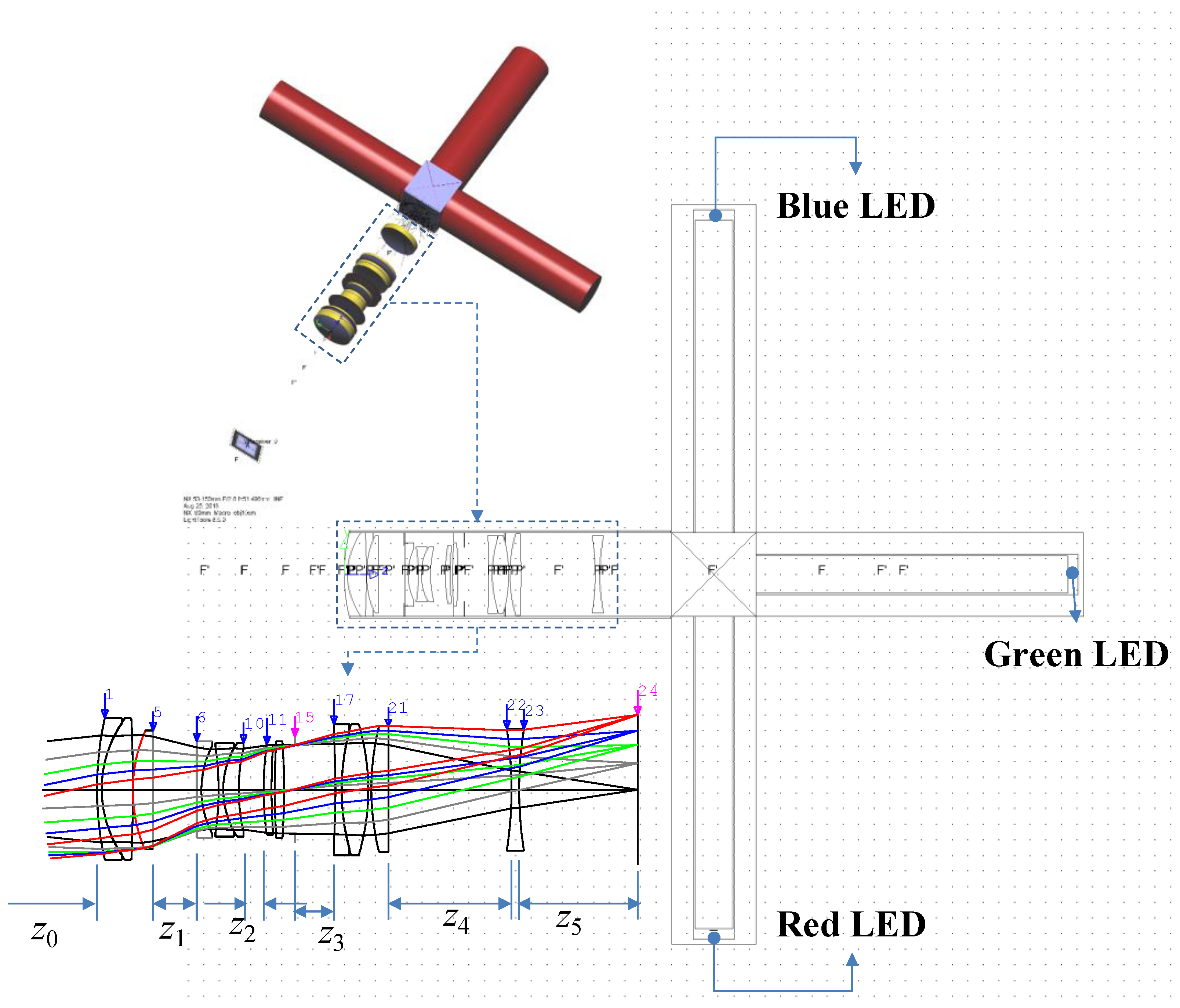
| CAM Angle (θ) | Magnification (m) | Object to 1st Surface (z0) | 5th Surface to 6th Surface (z1) | 10th Surface to 11th Surface (z2) | 15th Surface to 17th Surface (z3) | 21st Surface to 22nd Surface (z4) | 23rd Surface to Image (z5) |
|---|---|---|---|---|---|---|---|
| 0 | 0.000000 | infinity | 2.000000 | 11.289500 | 20.485869 | 10.922631 | 23.015842 |
| 10 | −0.1602570 | 362.66261 | 3.042602 | 10.246898 | 16.839850 | 14.568650 | 23.015842 |
| 20 | −0.2738123 | 215.09018 | 4.085205 | 9.204295 | 14.639113 | 16.769387 | 23.015842 |
| 30 | −0.3793376 | 158.81184 | 5.127810 | 8.161690 | 12.638163 | 18.770337 | 23.015842 |
| 40 | −0.4784159 | 129.86053 | 6.170413 | 7.119087 | 10.844003 | 20.564497 | 23.015842 |
| 50 | −0.5724333 | 112.66637 | 7.213015 | 6.076485 | 9.260316 | 22.148184 | 23.015842 |
| 60 | −0.6643599 | 101.28187 | 8.255619 | 5.033881 | 7.825628 | 23.582872 | 23.015842 |
| 70 | −0.7586855 | 92.932035 | 9.298222 | 3.991278 | 6.420389 | 24.988111 | 23.015842 |
| 80 | −0.8605840 | 86.269697 | 10.340826 | 2.948674 | 4.908803 | 26.499697 | 23.015842 |
| 90 | 0.973438 | 80.799997 | 11.38343 | 1.906070 | 3.237413 | 28.171087 | 23.015842 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, H.; Yeom, J.-Y.; Ryu, J.-M. Development of a Multiwavelength Visible-Range-Supported Opto–Ultrasound Instrument Using a Light-Emitting Diode and Ultrasound Transducer. Sensors 2018, 18, 3324. https://doi.org/10.3390/s18103324
Choi H, Yeom J-Y, Ryu J-M. Development of a Multiwavelength Visible-Range-Supported Opto–Ultrasound Instrument Using a Light-Emitting Diode and Ultrasound Transducer. Sensors. 2018; 18(10):3324. https://doi.org/10.3390/s18103324
Chicago/Turabian StyleChoi, Hojong, Jung-Yeol Yeom, and Jae-Myung Ryu. 2018. "Development of a Multiwavelength Visible-Range-Supported Opto–Ultrasound Instrument Using a Light-Emitting Diode and Ultrasound Transducer" Sensors 18, no. 10: 3324. https://doi.org/10.3390/s18103324
APA StyleChoi, H., Yeom, J. -Y., & Ryu, J. -M. (2018). Development of a Multiwavelength Visible-Range-Supported Opto–Ultrasound Instrument Using a Light-Emitting Diode and Ultrasound Transducer. Sensors, 18(10), 3324. https://doi.org/10.3390/s18103324