On-Barn Pig Weight Estimation Based on Body Measurements by Structure-from-Motion (SfM)

 ,
, 


Abstract
:1. Introduction
2. Materials and Methods
2.1. Structure from Motion (SfM)
2.2. Animal Imaging
2.3. Animals and Housing
2.4. Experimental Design and Data Acquisition
3. Results and Discussion
3.1. Method Performances
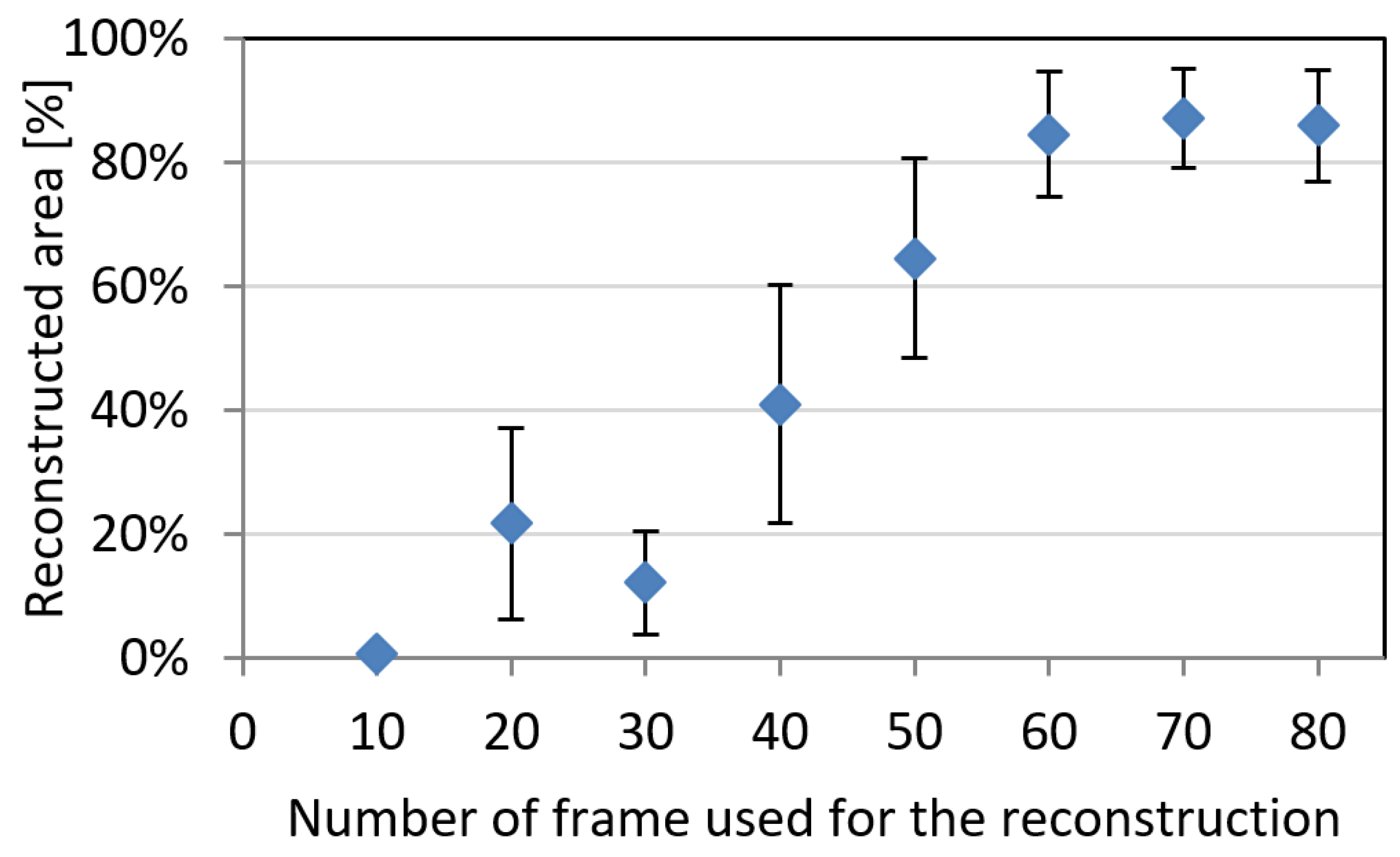
3.2. Influence of the Number of Frames
3.3. Influence of Animal’s Movements
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wongsriworaphon, A.; Arnonkijpanich, B.; Pathumnakul, S. An approach based on digital image analysis to estimate the live weights of pigs in farm environments. Comput. Electron. Agric. 2015, 115, 26–33. [Google Scholar] [CrossRef]
- Bracke, M.B.; Metz, J.H.; Spruijt, B.M.; Schouten, W.G. Decision support system for overall welfare assessment in pregnant sows B: validation by expert opinion. J. Anim. Sci. 2002, 80, 1835–1845. [Google Scholar] [CrossRef] [PubMed]
- Nilsson, M.; Herlin, A.; Ardö, H.; Guzhva, O.; Åström, K.; Bergsten, C. Development of automatic surveillance of animal behaviour and welfare using image analysis and machine learned segmentation technique. Animal 2015, 9, 1859–1865. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stookey, J.M.; Gonyou, H.W. The effects of regrouping on behavioral and production parameters in finishing swine. J. Anim. Sci. 1994, 72, 2804–2811. [Google Scholar] [CrossRef] [PubMed]
- Menesatti, P.; Costa, C.; Antonucci, F.; Steri, R.; Pallottino, F.; Catillo, G. A low-cost stereovision system to estimate size and weight of live sheep. Comput. Electron. Agric. 2014, 103, 33–38. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, W.; Winter, P.; Walker, L. Walk-through weighing of pigs using machine vision and an artificial neural network. Biosyst. Eng. 2008, 100, 117–125. [Google Scholar] [CrossRef]
- Apichottanakul, A.; Pathumnakul, S.; Piewthongngam, K. The role of pig size prediction in supply chain planning. Biosyst. Eng. 2012, 113, 298–307. [Google Scholar] [CrossRef]
- Wu, J.; Tillett, R.; McFarlane, N.; Ju, X.; Siebert, J.P.; Schofield, P. Extracting the three-dimensional shape of live pigs using stereo photogrammetry. Comput. Electron. Agric. 2004, 44, 203–222. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Jin, L.; Park, D.; Chung, Y. Automatic recognition of aggressive behaviour in pigs using a Kinect depth sensor. Sensors 2016, 16, 631. [Google Scholar] [CrossRef] [PubMed]
- Brandl, N.; Jorgensen, E. Determination of live weight of pigs from dimensions measured using image analysis. Comput. Electron. Agric. 1996, 15, 57–72. [Google Scholar] [CrossRef]
- Pope, G.; Moore, M. DPI Pig Tech Notes: Estimating Sow Live Weights without Scales; Department of Primary Industries: Queensland, Australia, 2002. Available online: http://www.dpi.qld.gov.au/pigs/8668.html (accessed on 7 September 2018).
- Pezzuolo, A.; Guarino, M.; Sartori, L.; González, L.A.; Marinello, F. On-barn pig weight estimation based on body measurement by means of a Kinect v1 sensor. Comput. Electron. Agric. 2018, 148, 29–36. [Google Scholar] [CrossRef]
- Andújar, D.; Dorado, J.; Fernández-Quintanilla, C.; Ribeiro, A. An approach to the use of depth cameras for weed volume estimation. Sensors 2016, 16, 972. [Google Scholar] [CrossRef] [PubMed]
- Dubbini, M.; Pezzuolo, A.; De Giglio, M.; Gattelli, M.; Curzio, L.; Covi, D.; Yezekyan, T.; Marinello, F. Last generation instrument for agriculture multispectral data collection. CIGR J. 2017, 19, 158–163. [Google Scholar]
- Wang, Z.; Walsh, K.B.; Verma, B. On-Tree Mango Fruit Size Estimation Using RGB-D Images. Sensors 2017, 17, 2738. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Wei, Q.; Jiang, Z. 3D Reconstruction of Space Objects from Multi-Views by a Visible Sensor. Sensors 2017, 17, 1689. [Google Scholar] [CrossRef] [PubMed]
- Han, J.; Shao, L.; Xu, D.; Shotton, J. Enhanced computer vision with Microsoft Kinect sensor: A review. IEEE Trans. Cybern. 2013, 43, 1318–1334. [Google Scholar] [PubMed]
- Kim, J.; Chung, Y.; Choi, Y.; Sa, J.; Kim, H.; Chung, Y.; Park, D.; Kim, H. Depth-Based Detection of Standing-Pigs in Moving Noise Environments. Sensors 2017, 17, 2757. [Google Scholar] [CrossRef] [PubMed]
- Kongsro, J. Estimation of pig weight using a Microsoft Kinect prototype imaging system. Comput. Electron. Agric. 2014, 109, 32–35. [Google Scholar] [CrossRef]
- Vranken, E.; Berckmans, D. Precision livestock farming for pigs. Animal Front. 2016, 7, 32–37. [Google Scholar] [CrossRef]
- Vázquez-Arellano, M.; Griepentrog, H.W.; Reiser, D.; Paraforos, D.S. 3-D Imaging Systems for Agricultural Applications—A Review. Sensors 2016, 6, 618. [Google Scholar] [CrossRef] [PubMed]
- Jadlovský, J.; Jadlovská, A.; Jadlovská, S.; Čerkala, J.; Kopčík, M.; Čabala, J.; Vošček, D. Research activities of the center of modern control techniques and industrial informatics. In Proceedings of the 14th International Symposium on Applied Machine Intelligence and Informatics (SAMI), Herlany, Slovakia, 21–23 January 2016; pp. 279–285. [Google Scholar]
- Sansoni, G.; Trebeschi, M.; Docchio, F. State-of-the-art and applications of 3D imaging sensors in industry, cultural heritage, medicine, and criminal investigation. Sensors 2009, 9, 568–601. [Google Scholar] [CrossRef] [PubMed]
- Jay, S.; Rabatel, G.; Hadoux, X.; Moura, D.; Gorretta, N. In-field crop row phenotyping from 3D modeling performed using Structure from Motion. Comput. Electron. Agric. 2015, 110, 70–77. [Google Scholar] [CrossRef]
- Wróżyński, R.; Pyszny, K.; Sojka, M.; Przybyła, C.; Murat-Błażejewska, S. Ground volume assessment using ’Structure from Motion’ photogrammetry with a smartphone and a compact camera. Open Geosci. 2017, 9, 281–294. [Google Scholar] [CrossRef]
- Javernick, L.; Brasington, J.; Caruso, B. Modelling the topography of shallow braided rivers using Structure-from-Motion photogrammetry. Geomorphology 2014, 213, 166–182. [Google Scholar] [CrossRef]
- Dai, F.; Lu, M. Assessing the accuracy of applying photogrammetry to take geometric measurements on building products. J. Construct. Eng. Manag. 2010, 136, 242–250. [Google Scholar] [CrossRef]
- Fathi, H.; Dai, F.; Lourakis, M. Automated as-built 3D reconstruction of civil infrastructure using computer vision: Achievements, opportunities, and challenges. Adv. Eng. Inform. 2015, 29, 149–161. [Google Scholar] [CrossRef]
- Brown, D. Tracker Video Analysis and Modelling Tool, 4.80 version; Open source physics, 2010. Available online: https://www.compadre.org/osp/items/detail.cfm?ID=7365 (accessed on 23 October 2018).
- Savio, E.; De Chiffre, L.; Schmitt, R. Metrology of freeform shaped parts. CIRP Ann. Manuf. Technol. 2007, 56, 810–835. [Google Scholar] [CrossRef]
- Marchant, J.A.; Schofield, C.P. Extending the snake image processing algorithm for outlining pigs in scenes. Comput. Electron. Agric. 1993, 8, 261–275. [Google Scholar] [CrossRef]
- Schofield, C.P.; Marchant, J.A.; White, R.P.; Brandl, N.; Wilson, M. Monitoring pig growth using a prototype imaging system. J. Agric. Eng. Res. 1999, 72, 205–210. [Google Scholar] [CrossRef]
- Pastorelli, G.; Musella, M.; Zaninelli, M.; Tangorra, F.; Corino, C. Static spatial requirements of growing-finishing and heavy pigs. Livest. Sci. 2006, 105, 260–264. [Google Scholar] [CrossRef]
- Pezzuolo, A.; Guarino, M.; Sartori, L.; Marinello, F. A Feasibility Study on the Use of a Structured Light Depth-Camera for Three-Dimensional Body Measurements of Dairy Cows in Free-Stall Barns. Sensors 2018, 18, 673. [Google Scholar] [CrossRef] [PubMed]
- Pezzuolo, A.; Giora, D.; Guo, H.; Ma, Q.; Guercini, S.; Sartori, L.; Marinello, F. A comparison of low-cost techniques for three-dimensional animal body measurement in livestock buildings. In Proceedings of the MetroAgriFor 2018: 1st Workshop on Metrology for Agriculture and Forestry, Ancona, Italy, 1–2 October 2018. [Google Scholar]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Shi, C.; Teng, G.; Li, Z. An approach of pig weight estimation using binocular stereo system based on LabVIEW. Comput. Electron. Agric. 2016, 129, 37–43. [Google Scholar] [CrossRef]
- Wang, K.; Guo, H.; Ma, Q.; Su, W.; Chen, L.; Zhu, D. A portable and automatic Xtion-based measurement system for pig body size. Comput. Electron. Agric. 2018, 148, 291–298. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Animal ID | Age (d) | Weight (kg) |
|---|---|---|
| Fiberglass reference | - | ~209 |
| 1 | 1303 | 260 |
| 2 | 1537 | 268 |
| 3 | 1598 | 257 |
| 4 | 1497 | 272 |
| 5 | 501 | 234 |
| 6 | 724 | 256 |
| Technique | Instrumentation Costs 1 (EUR) | Resolution 3 (mm) | RMS Noise 4 (mm) | Scanning Time 2 (min) | Processing Time 2 (min) |
|---|---|---|---|---|---|
| Manual measurements | 10–100 | n.a. | n.a. | 5–20 | 5–10 |
| 2D images | 10–100 | 0.5 × 0.5 × n.a. | n.a. | 3–10 | 10–40 |
| Lidar | 500–5000 | 1 × 1 × 3 | 2.5–6.0 | 3–30 | 30–90 |
| Kinect v1 | 100–200 | 1 × 1 × 2 | 0.7–1.2 | 3–10 | 30–90 |
| Structure from Motion | 10–200 | 3 × 3 × 2 | 1.0–2.5 | 5–15 | 120–240 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pezzuolo, A.; Milani, V.; Zhu, D.; Guo, H.; Guercini, S.; Marinello, F. On-Barn Pig Weight Estimation Based on Body Measurements by Structure-from-Motion (SfM). Sensors 2018, 18, 3603. https://doi.org/10.3390/s18113603
Pezzuolo A, Milani V, Zhu D, Guo H, Guercini S, Marinello F. On-Barn Pig Weight Estimation Based on Body Measurements by Structure-from-Motion (SfM). Sensors. 2018; 18(11):3603. https://doi.org/10.3390/s18113603
Chicago/Turabian StylePezzuolo, Andrea, Veronica Milani, DeHai Zhu, Hao Guo, Stefano Guercini, and Francesco Marinello. 2018. "On-Barn Pig Weight Estimation Based on Body Measurements by Structure-from-Motion (SfM)" Sensors 18, no. 11: 3603. https://doi.org/10.3390/s18113603
APA StylePezzuolo, A., Milani, V., Zhu, D., Guo, H., Guercini, S., & Marinello, F. (2018). On-Barn Pig Weight Estimation Based on Body Measurements by Structure-from-Motion (SfM). Sensors, 18(11), 3603. https://doi.org/10.3390/s18113603